超磁致伸縮電液伺服閥驅(qū)動(dòng)機(jī)構(gòu)控制系統(tǒng)設(shè)計(jì)
2014-05-10 07:47:58楊朝舒何忠波李冬偉薛光明
機(jī)床與液壓 2014年23期
楊朝舒,何忠波,李冬偉,薛光明
(軍械工程學(xué)院車(chē)輛與電氣工程系,河北石家莊050003)
0 前言
電液伺服系統(tǒng)具有單位功率質(zhì)量小、力—質(zhì)量比大、工作頻帶寬、魯棒性好和抗過(guò)載能力強(qiáng)等優(yōu)良特性,在現(xiàn)代航空工業(yè)、汽車(chē)工業(yè)等領(lǐng)域得到了廣泛地應(yīng)用。電液伺服閥(Electro Hydraulic Servo Valve,EHSV)是電液伺服系統(tǒng)最重要的部件,它是溝通電子器件和液壓器件的橋梁,對(duì)整個(gè)系統(tǒng)的動(dòng)態(tài)性能起著決定性的作用[1]。
超磁致伸縮材料(Giant Magnetostrictive Material,GMM)是一種能夠在外磁場(chǎng)作用下發(fā)生較大變形的新型磁功能材料,具有響應(yīng)速度快、能量密度大、居里溫度高等一系列優(yōu)良特性[2],將GMM 運(yùn)用于EHSV 驅(qū)動(dòng)機(jī)構(gòu)之中所設(shè)計(jì)而成的超磁致伸縮電液伺服閥,具有結(jié)構(gòu)緊湊、精度高、響應(yīng)速度快的特點(diǎn),其最大輸出流量達(dá)2 L/min,帶寬可達(dá)650 Hz(-3 dB)[3]。為了將GMM 響應(yīng)迅速的特性在EHSV 的開(kāi)發(fā)中充分體現(xiàn)出來(lái),本文作者設(shè)計(jì)了能夠高速、高效控制GMM 機(jī)構(gòu)工作的驅(qū)動(dòng)和控制系統(tǒng),該控制系統(tǒng)基于PicoScope2203 數(shù)字示波器和STC89C51 單片機(jī),通過(guò)上位機(jī)發(fā)出指令,既能實(shí)現(xiàn)高頻下任意波形的開(kāi)環(huán)控制,又能夠?qū)崿F(xiàn)占空比可調(diào)的閉環(huán)PWM 控制。此外,該控制系統(tǒng)的集成度很高,操作也比較便捷。
1 GMM 電液伺服閥結(jié)構(gòu)和工作原理
圖1 是GMM 電液伺服閥的結(jié)構(gòu)示意圖。其工作原理為:給激勵(lì)線(xiàn)圈通入幅值電流,產(chǎn)生激勵(lì)磁場(chǎng)。通過(guò)改變激勵(lì)電流的大小和方向可以改變激勵(lì)磁場(chǎng)的大小和方向,進(jìn)而使GMM 棒的長(zhǎng)度發(fā)生變化,推動(dòng)頂桿,并最終帶動(dòng)閥芯產(chǎn)生位移輸出[4]。
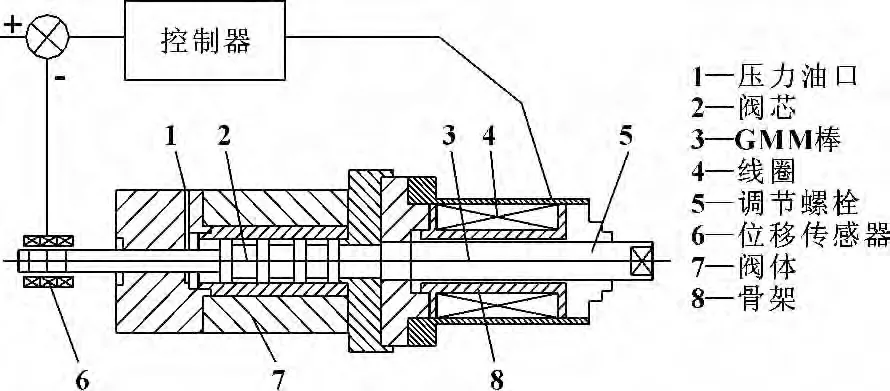
圖1 GMM 伺服閥結(jié)構(gòu)圖
2 驅(qū)動(dòng)機(jī)構(gòu)控制系統(tǒng)的組成和工作原理
為了實(shí)現(xiàn)EHSV 閥芯的高速運(yùn)動(dòng)和精確控制,必須要盡量減小從上位機(jī)發(fā)出指令信號(hào)到閥芯產(chǎn)生位移的反應(yīng)時(shí)間,并盡量提高采樣頻率。整個(gè)控制系統(tǒng)硬件部分分為控制、驅(qū)動(dòng)和采集三大部分,控制系統(tǒng)的結(jié)構(gòu)圖和實(shí)物圖分別如圖2、3所示。
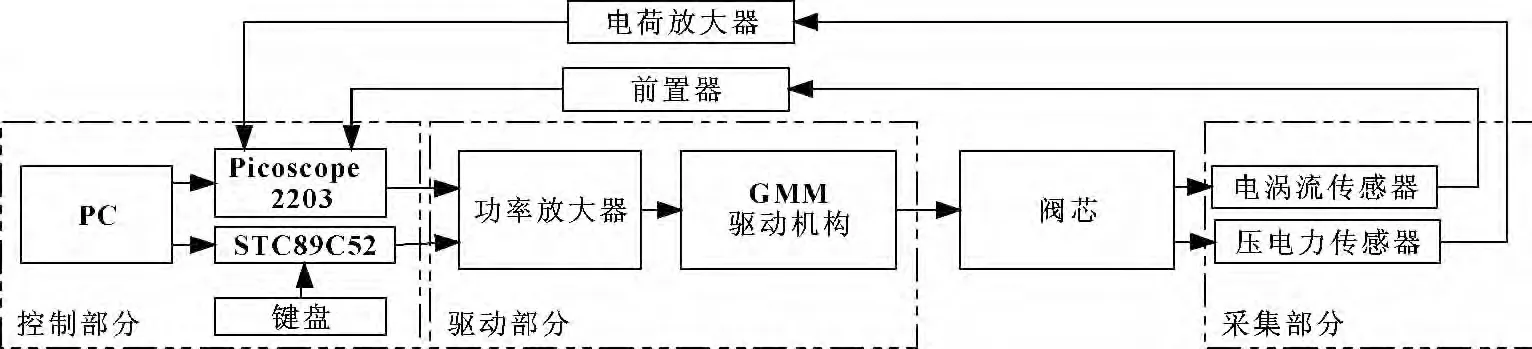
圖2 控制系統(tǒng)結(jié)構(gòu)圖
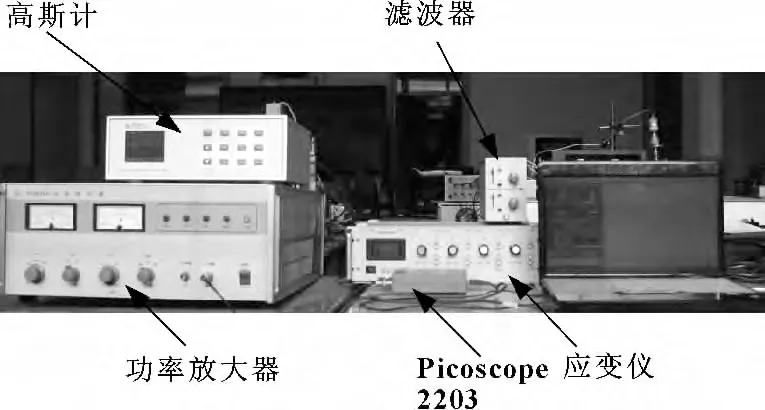
圖3 控制系統(tǒng)實(shí)物圖
(1)控制部分
控制部分的作用是根據(jù)上位機(jī)的指令產(chǎn)生相應(yīng)的控制信號(hào),處理鍵盤(pán)響應(yīng),接收采集部分采集到的電信號(hào),主要由PC 機(jī)、PicoScope2203 數(shù)字示波器、STC89C51 單片機(jī)組成。
PicoScope2203 數(shù)字示波器由英國(guó)Pico Technology公司生產(chǎn),集成了信號(hào)發(fā)生器、A/D、D/A 轉(zhuǎn)換器、示波器的功能。無(wú)需單獨(dú)供電,通過(guò)計(jì)算機(jī)數(shù)字量控制,可以實(shí)現(xiàn)±2 V 以?xún)?nèi)任意波形輸出和雙通道±20 V 以?xún)?nèi)電壓信號(hào)的采集。在控制系統(tǒng)中,Picoscope2203 被用于產(chǎn)生周期性激勵(lì)信號(hào),并接收傳感器采集到的位移、力反饋信號(hào);STC89C51 單片機(jī)是一種低功耗,高性能的8 位單片機(jī)。片內(nèi)帶有4 K 字節(jié)的閃速可編程及可擦寫(xiě)儲(chǔ)存器(EPROM),可以在線(xiàn)對(duì)存儲(chǔ)器進(jìn)行重新編程。在控制系統(tǒng)中用于實(shí)現(xiàn)伺服閥的PWM 控制。
(2)驅(qū)動(dòng)部分
驅(qū)動(dòng)部分由GF800 功率放大器和GMM 驅(qū)動(dòng)機(jī)構(gòu)組成,用于將控制信號(hào)進(jìn)行放大,并驅(qū)動(dòng)GMM 機(jī)構(gòu)產(chǎn)生位移,進(jìn)而帶動(dòng)閥芯運(yùn)動(dòng)。
(3)采集部分
采集部分由HN808 電渦流傳感器及其前置器、YDL-1X 石英晶體壓電力傳感器、電荷放大器組成,用于采集閥芯產(chǎn)生的動(dòng)態(tài)位移和力信號(hào),并轉(zhuǎn)化成電信號(hào),反饋給控制部分。
圖4 為超磁致伸縮驅(qū)動(dòng)機(jī)構(gòu)的實(shí)物圖。

圖4 超磁致伸縮驅(qū)動(dòng)機(jī)構(gòu)實(shí)物圖
3 軟件設(shè)計(jì)
3.1 信號(hào)驅(qū)動(dòng)部分程序
PicoScope2203 數(shù)字示波器中對(duì)于驅(qū)動(dòng)信號(hào)波形的選擇有兩種方式,一種選擇固定波形:儀器內(nèi)置波形包括方波、正弦、鋸齒波信號(hào);另一種是通過(guò)任意波形產(chǎn)生模塊(Arbitrary Waveform Generator,AWG),首先生成一組描述所需波形的序列,其元素為0~255 之間的整數(shù)(即每個(gè)元素均為BYTE 型變量),然后設(shè)置信號(hào)的頻率和幅值等參數(shù)以及讀取波形序列的長(zhǎng)度。儀器會(huì)根據(jù)上述參數(shù)和序列描述的波形,周期性的產(chǎn)生所需要的激勵(lì)信號(hào)。信號(hào)驅(qū)動(dòng)部分程序設(shè)計(jì)流程如圖5所示。
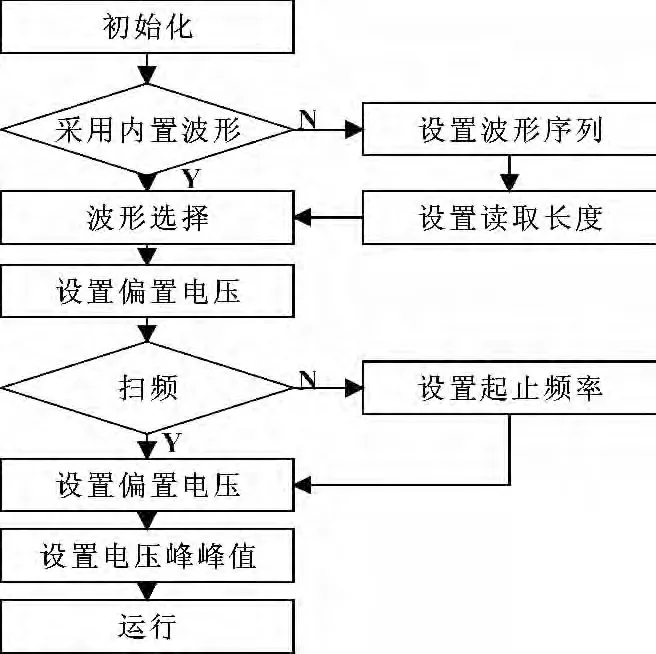
圖5 信號(hào)驅(qū)動(dòng)部分程序流程圖
3.2 數(shù)據(jù)采集部分程序
PicoScope2203 數(shù)字示波器的采樣方式主要有3種:Block 模式,Streaming 模式和ETS(Equivalent Time Sampling)模式[5]。Block 模式下的采樣頻率非常高(<1 μs),超過(guò)了計(jì)算機(jī)的讀取速度。儀器會(huì)將采集到的數(shù)據(jù)首先存入自帶的存儲(chǔ)器之中,然后以數(shù)據(jù)塊(Block)的方式向計(jì)算機(jī)傳輸,這種方式可以很迅速地捕捉到系統(tǒng)輸出信號(hào)的變化,但由于儀器存儲(chǔ)單元有限,無(wú)法進(jìn)行長(zhǎng)時(shí)間的數(shù)據(jù)采集;Streaming 模式下采樣頻率相對(duì)較低,儀器會(huì)將采集到的數(shù)據(jù)直接存入計(jì)算機(jī)內(nèi)存之中,記錄數(shù)據(jù)的長(zhǎng)度由計(jì)算機(jī)內(nèi)存來(lái)決定,且不存在延遲,適合于采樣頻率要求不高的長(zhǎng)時(shí)間采樣;ETS 模式適用于長(zhǎng)時(shí)間采集周期信號(hào)的情況,通過(guò)若干個(gè)周期的采集,儀器將得到的重復(fù)性信號(hào)進(jìn)行合成處理,使得其等效采樣頻率高于單個(gè)周期的采樣頻率。
在控制系統(tǒng)中,綜合利用上述3 種采樣模式,可以拓寬控制系統(tǒng)的使用范圍。Block 模式用于測(cè)量系統(tǒng)的瞬態(tài)響應(yīng);Streaming 模式用于測(cè)量系統(tǒng)的穩(wěn)態(tài)響應(yīng)。并且,裝載了各種傳感器的靈敏度后,可以直接得到各待測(cè)量的變化曲線(xiàn);ETS 模式主要用于觸發(fā)器的設(shè)置。采集部分的程序流程如圖6所示。
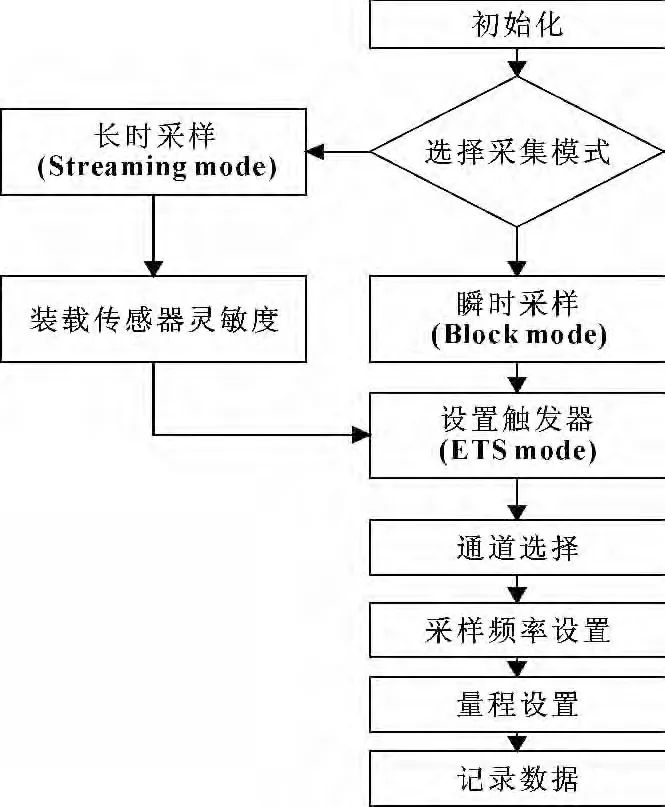
圖6 數(shù)據(jù)采集部分程序流程圖
3.3 PWM 控制程序
PWM 控制采用STC89C51 單片機(jī)來(lái)實(shí)現(xiàn),該型號(hào)的單片機(jī)沒(méi)有專(zhuān)用的PWM 硬件資源[6],所以采用定時(shí)器方式,在P2.1 端口產(chǎn)生,其頻率和占空比通過(guò)串口通信的方式由上位機(jī)指定,其控制流程如圖7所示。控制系統(tǒng)的上位機(jī)軟件界面如圖8所示。
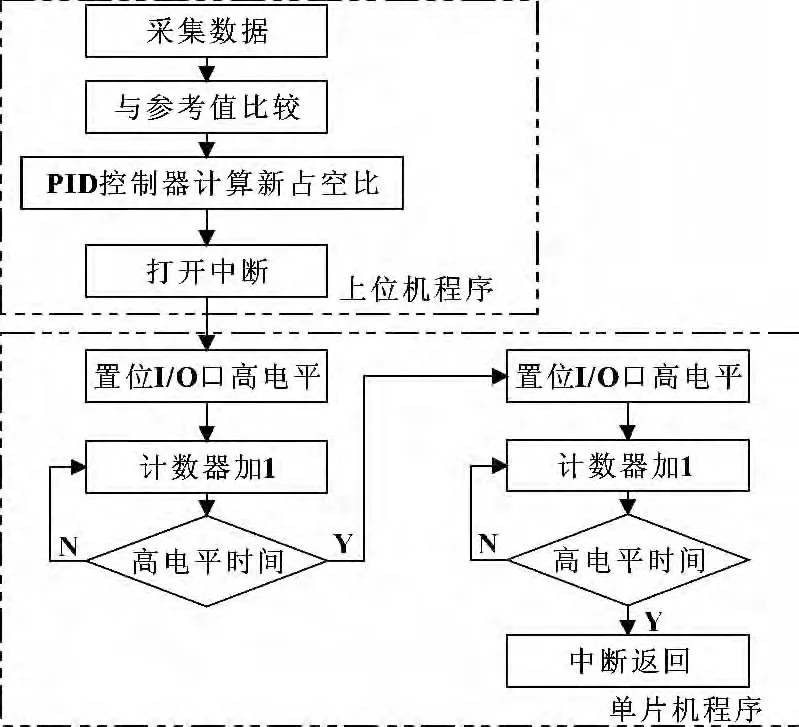
圖7 PWM 控制部分程序流程圖
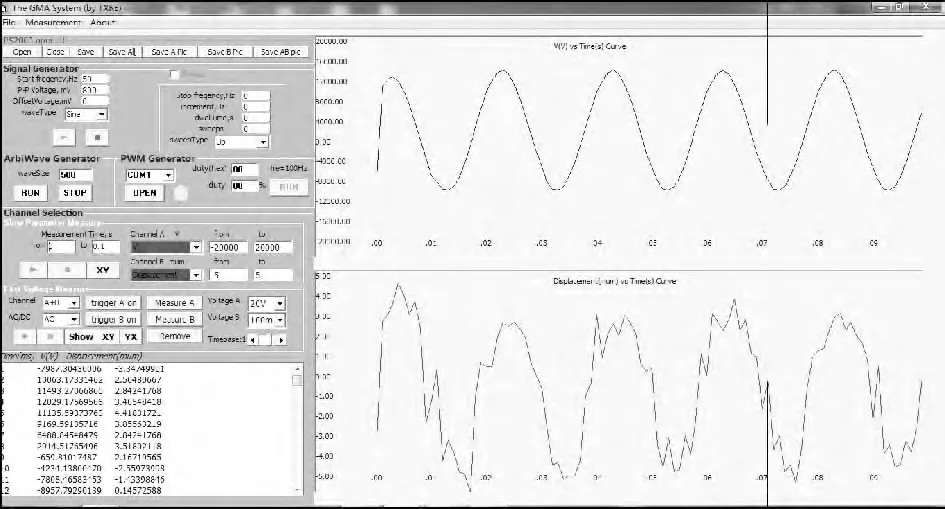
圖8 控制系統(tǒng)人機(jī)界面截圖
4 系統(tǒng)控制
4.1 控制策略
驅(qū)動(dòng)機(jī)構(gòu)中的GMM 本身具有很強(qiáng)的磁滯特性,又工作在多場(chǎng)耦合的環(huán)境中,系統(tǒng)非線(xiàn)性成分比較大,其精確地物理模型難以建立。PID 控制在生產(chǎn)過(guò)程中是一種最普遍采用的控制方法,其最大的特點(diǎn)是不必建立系統(tǒng)精確的數(shù)學(xué)模型[7]。通過(guò)實(shí)驗(yàn)整定比例、積分、微分3 個(gè)參數(shù),可以取得較好的控制效果。在電磁閥的控制策略中,采用增量型算法,其表達(dá)式如下:

式中:Δu(k)為控制器的輸入增量;e(k)為k時(shí)刻輸出量與參考量之間的誤差;kp,ki,kd為控制參數(shù)。
4.2 控制方法
系統(tǒng)采用PWM 信號(hào)控制驅(qū)動(dòng)機(jī)構(gòu)的輸出位移,通過(guò)不斷調(diào)節(jié)驅(qū)動(dòng)信號(hào)的占空比,實(shí)現(xiàn)對(duì)電磁閥流量的調(diào)節(jié)。PWM(Pulse Width Modulation)脈寬調(diào)制技術(shù)的基本原理為:
假設(shè)在周期T內(nèi),驅(qū)動(dòng)機(jī)構(gòu)的位移為x,

其中,t0為接通時(shí)間,將上式用傅里葉級(jí)數(shù)進(jìn)行展開(kāi),最終得到

其中,α 為占空比,ω=2π/T。
滑閥的流量特性可用式(4)描述:

當(dāng)雷諾數(shù)Re>260,系統(tǒng)壓力保持恒定時(shí),參數(shù)Cd,W,Δp可視為常數(shù)[8],由于驅(qū)動(dòng)信號(hào)的開(kāi)關(guān)頻率比伺服系統(tǒng)的截止頻率高很多[9],通過(guò)伺服閥的實(shí)際流量可視做由閥芯位移的直流分量所引起,即:

式(5)說(shuō)明,可以通過(guò)改變驅(qū)動(dòng)信號(hào)的占空比α 來(lái)控制伺服閥的流量。
在驅(qū)動(dòng)機(jī)構(gòu)能夠完全響應(yīng)的前提下,驅(qū)動(dòng)信號(hào)的開(kāi)關(guān)頻率越高輸出波紋就越小,但是過(guò)高的開(kāi)關(guān)頻率會(huì)影響驅(qū)動(dòng)機(jī)構(gòu)的壽命,所以要在輸出波紋可接受的條件下盡量降低開(kāi)關(guān)頻率[10]。
5 結(jié)論
(1)介紹了GMM 電液伺服閥的結(jié)構(gòu)和工作原理,探討了GMM 電液伺服閥的PWM 控制方法和PID控制策略。
(2)設(shè)計(jì)了基于PicoScope2203 數(shù)字示波器和STC89C51 單片機(jī)的GMM 電液伺服閥的測(cè)試與控制系統(tǒng),該系統(tǒng)具有集成度高、操作便捷等特點(diǎn)。
[1]俞軍濤,焦宗夏,吳帥.基于液壓微位移放大結(jié)構(gòu)的新型壓電陶瓷直接驅(qū)動(dòng)閥設(shè)計(jì)及仿真[J].機(jī)械工程學(xué)報(bào),2013,49(2):151-158.
[2]王博文,曹淑英,黃文美.超磁致伸縮材料與器件[M].北京:冶金工業(yè)出版社,2008.
[3]張雪梅,李光彬.超磁致伸縮材料致動(dòng)器用于開(kāi)關(guān)式數(shù)字閥驅(qū)動(dòng)的研究[J].機(jī)械研究與應(yīng)用,2006,29(5):34-35.
[4]翁玲,王博文,孫英.超磁致伸縮致動(dòng)器的輸出位移與其控制研究[J].儀器儀表學(xué)報(bào),2006,27(7):800-803.
[5]PicoScope 2000 Series PC Oscilloscope Programmer's Guide[M]:Pico Technology Ltd,2009.
[6]舉平,余為清,楊樹(shù)軍.一種高速開(kāi)關(guān)閥新型驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)[J].機(jī)床與液壓,2012,40(21):117-119.
[7]劉金琨.先進(jìn)PID 控制及其MATLAB 仿真[M].北京:電子工業(yè)大學(xué)出版社,2002.
[8]趙偉,張凱,黃鈺瞾.一種大流量高速開(kāi)關(guān)閥的設(shè)計(jì)與實(shí)驗(yàn)研究[J].液壓與氣動(dòng),2013,265(9):38-40.
[9]魯中良,吳豐順,張堯,等.PWM 技術(shù)在電液換向閥流量控制中的應(yīng)用[J].液壓氣動(dòng)與密封,2003,100(4):33-36.
[10]堵利賓,張河新,李建朝,等.新型高速開(kāi)關(guān)閥單片機(jī)PWM 控制電路及的設(shè)計(jì)及應(yīng)用[J].液壓與氣動(dòng),2007,40(11):67-69.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00