達芬奇機器人甲狀腺手術中麻醉深度及肌松監測儀應用效果觀察
2015-05-08 01:59:44高成杰王惠霞
中華災害救援醫學 2015年5期
鞏 晶,高成杰,劉 健,王 建,王惠霞
達芬奇機器人甲狀腺手術中麻醉深度及肌松監測儀應用效果觀察
鞏 晶,高成杰,劉 健,王 建,王惠霞
目的 觀察麻醉深度及肌松監測儀在達芬奇機器人甲狀腺手術中的應用效果。方法 選取擇期甲狀腺手術全身麻醉患者70例,隨機分為兩組:A組達芬奇甲狀腺手術中應用麻醉深度及肌松監測儀,B組傳統腔鏡甲狀腺手術,記錄患者入手術室時(T0),插管時(T1),切皮時(T2),開始使用CO2腔鏡時(T3),分離瘤體時(T4),撤離CO2腔鏡時(T5),拔管時(T6)的平均動脈壓(mean artery pressure,MAP)、心率(heart rate,HR),術中用藥量,患者的清醒、拔管時間,比較兩組患者術中的麻醉情況。結果 (1)除T3外,其他時間點兩組HR平均值差異均有統計學意義(P<0.0001);各時間點兩組MAP平均值差異均有統計學意義(P<0.0001)。(2)A組T1、T3、T5的HR平均值與T0比較,差異均有統計學意義(P<0.008);而B組除T3外,其他時間點與T0的HR平均值比較,差異均有統計學意義(P<0.008)。(3)除T3外,A組其他時間點與T0的MAP平均值比較,差異均有統計學意義(P<0.008);B組各時間點與T0的MAP平均值比較,差異均有統計學意義(P<0.008)。(4)A組的丙泊酚、阿曲庫銨用量少于B組,差異均有統計學意義(P<0.05);兩組瑞芬太尼的用量比較,差異無統計學意義;較于B組,A組蘇醒、拔管時間明顯更短,差異均有統計學意義(P<0.05)。結論 在達芬奇甲狀腺手術中采用麻醉深度及肌松監測儀進行監測,能夠有效監測患者HR、MAP,減少全身麻醉用藥總量,縮短術后蘇醒時間,安全性高,能較好地監測麻醉深度和肌松水平。
麻醉深度及肌松監測;達芬奇機器人手術系統;甲狀腺手術
達芬奇機器人手術系統(da Vinci surgical system)于2000年被美國食品藥物管理局批準用于臨床,機器人輔助下的腔鏡手術開始在發達國家廣泛開展,之后機器人輔助甲狀腺手術也逐步用于治療多種甲狀腺疾病。但機器人甲狀腺手術對麻醉的要求和其他微創手術有所不同,明顯增加麻醉管理的復雜性[1],特別是敷料覆蓋下特殊手術部位對麻醉肌松狀態和麻醉深度控制提出更高的要求。2012-01至2014-11,濟南軍區總醫院共完成達芬奇機器人甲狀腺手術35例,現將其麻醉過程與傳統腔鏡甲狀腺手術對比總結報告如下。
1 資料與方法
1.1 一般資料 全身麻醉下擇期行甲狀腺手術患者70例,男28例,女42例,年齡18~49歲,平均(40.0±6.2)歲,體重55~75 kg。根據患者意愿,將其分為兩組,其中A組為達芬奇系統手術組(35例),B組為傳統腔鏡手術組(35例)。手術包括甲狀腺次全切除術、甲狀腺近全切除術、甲狀腺全切加區域淋巴結清掃術。1例甲狀旁腺功能亢進患者,其他患者均無高血壓、心臟病、糖尿病等基礎疾病。術后隨訪24~48 h。
1.2 方法 所有患者均使用Datex-Ohmeda-7100麻醉機和PHILIPS-MP-40多功能監護儀,行胸前導聯心電圖(electrocardiogram,ECG)、經皮血氧飽和度(pulse oxygen saturation,SpO2)、呼氣末二氧化碳分壓(end-tidal carbon dioxide pressure,PETCO2)和有創橈動脈壓監測,術前用藥為地西泮10 mg、東莨菪堿0.3 mg肌肉注射,麻醉誘導用咪達唑侖0.05 mg/kg、舒芬太尼0.4 μg/kg、丙泊酚1 mg/kg、順式阿曲庫銨0.3 mg/kg、麻醉維持用瑞芬太尼0.01~0.05 mg/(kg·h)、丙泊酚4~10 mg/(kg·h),吸入七氟烷V%為0.5~1.5。A組患者并用Narcotrend-ScehillermcT麻醉深度監測儀和 TOF-Watch.SK肌松監測儀持續監測麻醉深度和肌松水平,根據肌松監測結果精確調整肌松藥輸注速率,使4個成串刺激 (train of four,TOF)計數穩定于2。根據麻醉深度監測合理調節吸入七氟烷V%濃度,使Narcotrend無量綱[2]指數維持在40.0±9.1。在PETCO2升高而麻醉深度檢測變化不大時,適當增加每分通氣量減弱CO2蓄積對患者造成的不良影響。B組患者氣管插管后依據經驗調控術中麻醉深度和肌松水平。術中控制呼吸,潮氣量6~7 ml/kg,呼吸頻率12~14 次/min。兩組患者均根據術中動脈血氣調節呼吸參數,維持PETCO2在35~45 mmHg(1 mmHg=0.133 kPa)。在縫合切口前,停止輸注肌松藥和吸入七氟烷,而仍以瑞芬太尼和丙泊酚維持麻醉至手術縫皮結束。嚴格按照拔管指征,待患者完全清醒,肌力達到5級,然后拔除氣管導管送回病房。
1.3 手術過程 A組麻醉機與機器人患者平車的位置擺放:機器人甲狀腺手術麻醉機置于患者右肩外側0.5 m處,患者平車置于患者頭部正前方,4個支臂跨過頭部置于患者胸部上方。經腋窩切口置入機器人攝像臂及1號機械臂(超聲刀)和2號機械臂(分離鉗),1、2號臂分別位于切口下緣和上緣,攝像臂位于切口中間1、2號臂上方,三者呈“△”分布,以避免三臂之間相互干擾,經胸前8 mm戳卡置入3號機械臂(抓鉗)。上述連接完成后術者即可通過操控臺對機械臂進行操縱,手術方法同開放性手術。B組患者采用胸前壁和乳暈入路或腋窩乳暈入路,用腔鏡器械、超聲刀進行手術。兩組患者均采用仰臥位,頸部稍微伸展,用含腎上腺素(1 mg/500 ml)的生理鹽水皮下注射減少皮下出血,CO2氣體維持壓力為6~8 mmHg。
1.4 觀察指標 分別于入室時(T0),插管時(T1),切皮時(T2),開始使用CO2腔鏡時(T3)分離瘤體時(T4),撤離CO2腔鏡時(T5),拔管時(T6),對ECG、HR、MAP、SpO2、PETCO2進行常規監測。

2 結 果
A組35例均順利完成手術,肌松鎮靜鎮痛結果良好,在整個麻醉過程中,安全平穩,無肢動反應,術后蘇醒迅速。無1例術中知曉、蘇醒延遲、術后躁動。B組有1例發生肢動反應,通過增加吸入藥量處理。兩組均未出現因麻醉操作和用藥不當導致嚴重不良后果的發生。
2.1 兩組HR、MAP重復測量方差分析結果 總體上,A組的HR與MAP在不同時間點的平均值低于B組,即兩組各指標平均值不同(表1)。各時間點兩組HR、MAP平均值差異比較結果:除T3外,其他時間點兩組HR平均值差異均有統計學意義(P<0.0001);各時間點兩組MAP平均值間差異均有統計學意義(P<0.0001)。兩組T0的HR、MAP值與其他時間點的配對t檢驗結果顯示:對于HR,A組T1、T3、T5的平均值與T0比較,差異均有統計學意義(P<0.008),B組除T3外,其他時間點與T0的平均值,差異均有統計學意義(P<0.008); 對于MAP,A組除T3外,其他時間點與T0的平均值,差異均有統計學意義(P<0.008),B組各時間點與T0的平均值,差異均有統計學意義(P<0.008)。HR與MAP時間趨勢分析結果:兩組HR、MAP在不同時間上的平均變化趨勢是不一致的(P<0.05),其相應概貌圖,見圖1、2。

表1 兩組全身麻醉下擇期行甲狀腺手術的HR、MAP比較 (n=70;
注:A組為達芬奇系統手術組,B組為傳統腔鏡手術組;與A組比較,①P<0.05;與同組T0比較,②P<0.0083

圖1 2012-01至2014-11濟南軍區總醫院甲狀腺不同手術方式中不同時間點的HR波動圖
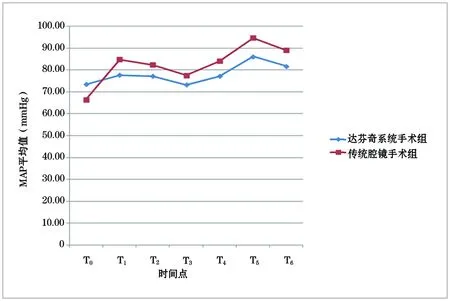
圖2 2012-01至2014-11濟南軍區總醫院甲狀腺不同手術方式中不同時間點的MAP波動圖
2.2 兩組麻醉藥用量及時間比較 A組的丙泊酚、阿曲庫銨的用量少于B組,差異均有統計學意義(P<0.05);兩組瑞芬太尼的用量比較,差異無統計學意義。A組蘇醒時間、拔管時間較于B組更短,差異均有統計學意義(P<0.05),見表2。
表2 兩組全身麻醉下擇期行甲狀腺手術的藥物用量和時間比較 (n=70;
注:A組為達芬奇系統手術組,B組為傳統腔鏡手術組
3 討 論
達芬奇機器人系統使得視野更加清晰,解剖結構更為明顯,創傷小、出血量少,應用前景廣泛[3,4],優勢明顯。機器人甲狀腺手術在技術上是安全的,對于高分化甲狀腺癌患者是一個不錯的手術選擇[5,6],但仍有潛在的風險,具體包括:(1)達芬奇甲狀腺手術的準備時間較長[7],在麻醉誘導后、手術正式開始前的準備階段,若麻醉深度控制不夠,極易出現術中知曉、肢動反應,給患者帶來不必要的身心傷害,甚至導致心理疾患。(2)術中長時間使用CO2腔鏡,皮下氣腫的形成,疏松的蜂窩組織吸收的CO2等都是高碳酸血癥的因素,存在CO2麻醉風險,使麻醉者難以鑒別CO2蓄積造成的蘇醒延遲。嚴重者可出現呼吸抑制,甚至危及生命。(3)達芬奇甲狀腺手術中對復雜患者麻醉管理需更縝密,尿毒癥腎衰竭期繼發性甲狀旁腺功能亢進的患者[8],除腎功能衰竭外還存在電解質紊亂,腎功能衰竭嚴重影響肌松藥的藥代動力學,術前一天的透析無法有效解決高鈣血癥。Ca2+濃度過高把終板電位的振幅升高到肌細胞閾值以上,神經興奮引起的終板電位不能迅速過渡到肌細胞動作電位,延長了肌松藥的作用時間,影響麻醉者對肌松藥的判斷。(4)在處理復雜瘤體時,無論是傳統術式還是先進的達芬奇機器人系統下的術式,對于術者、麻醉醫師都是一項重大挑戰,手術時間可能無預期的延長,當腫瘤侵犯到重要的神經、頸部大血管,或者淋巴結轉移廣泛,長時間麻醉很容易出現肌松藥的蓄積,氣腹時間的延長將增加高碳酸血癥的風險,對頸動脈竇壓力感受器特殊手術位置的刺激,牽拉頸內靜脈對回心血流量的影響以及對迷走神經的刺激,都會使術中患者的HR、BP帶來較大波動,使心血管反應增加。因此,良好的術中檢測和麻醉管理對于這種干擾的提前預處理尤為重要。(5)長時間手術敷料全覆蓋下影響麻醉醫師對患者及時的觀察,例如術中發生藥物外漏或靜脈針脫落。傳統麻醉方法下常用HR,BP,神經反射的活動(出汗、流淚、分泌物增多),肢動,瞳孔大小等判斷麻醉藥的濃度、計量及麻醉深度,若精確度不夠,麻醉過淺則往往會導致眨眼、肢動等機體反應,盲目追加肌松鎮靜藥物來加深麻醉既造成藥物浪費又增加術中知曉、蘇醒延遲、肌松藥殘留的風險。達芬奇機器人系統甲狀腺手術要求敷料全部覆蓋住患者,麻醉醫師無法像往常一樣觀察神經反射活動,HR和BP的變化受手術操作影響較大,如果在術中出現肢動,不僅會損害昂貴的機器人機械臂,還會對患者的組織器官造成巨大損傷。術中肌松和麻醉深度監測尤為重要,該方法術中觀察數字化精確給藥下各時間點麻醉深度和肌松水平,平穩恰當、可控性高,可有效避免患者體動對機器人機械臂的相互損傷,減少肌松藥和鎮靜、鎮痛麻醉藥物的不合理應用,又能及時預防術中知曉、機體反應帶來的一系列影響。
本研究表明,達芬奇甲狀腺手術在麻醉深度監測儀和肌松監測數字化給藥的應用下,能夠有效降低術中睜眼,避免肢動反應的發生,減少全身麻醉用藥總量,患者蘇醒迅速、安全徹底,實用性、科學性更高,為該手術系統提供理想的肌松條件和麻醉深度,創造一種安全可靠的麻醉監測方法。
[1] 王 維,隋 波,李冠華,等.達芬奇機器人胸腺瘤切除術的麻醉管理[J].中國微創外科雜志,2011,11(8):706-708.
[2] 陳小云,麻志敏.麻醉深度監測儀在小兒全身麻醉中的應用[J].吉林醫學,2013,34(23):4692-4693.
[3] 王 維,隋 波,馮澤國,等.達芬奇機器人胸科手術的麻醉經驗總結[J]. 醫學臨床研究,2011,28(10):1896-1899.
[4] 李冠華,隋 波,王 維,等.達芬奇機器人手術中長時間二氧化碳氣腹對老年人QT離散度的影響[J].中國醫師進修雜志,2012,35(30):26-28.
[5] Lee H Y, Yang I S, Hwang S B,etal. Robotic thyroid surgery for papillary thyroid carcinoma: lessons learned from 100 consecutive surgeries[J]. Surg Laparosc Endosc Percutan Tech, 2015,25(1):27-32.
[6] Lee Y M, Yi O, Sung T Y,etal. Surgical outcomes of robotic thyroid surgery using a double incision gasless transaxillary approach: analysis of 400 cases treated by the same surgeon[J]. Head Neck,2014,36(10):1413-1419.
[7] 汪 洋,楊衛平.達芬奇機器人甲狀腺手術[J].中國普通外科雜志, 2011,20(5):529-532.
[8] 朱 見,賀青卿.機器人甲狀腺全切加頸淋巴結清掃的過去、現在與未來[J]. 腹腔鏡外科雜志,2014,19(4):248-251.
(2015-01-29收稿 2015-04-18修回)
(責任編輯 羅發菊)
Oberservation on effect of applying monitors to test anesthesia depth and muscle relaxants in da Vinci robotic thyroid surgery
GONGJing,GAOChengJie,LIUJian,WANGJian,andWANGHuixia.
DepartmentofAnesthesia,GeneralHospitalofJinanMilitaryRegion,ChinesePeople’sLiberationArmy,Jinan250031,China
Objective To observe the efficacy of applying monitors to test anesthesia depth and muscle relaxants in da Vinci robotic thyroid surgery. Methods 70 patients who underwent elective thyroid surgery were selected, and randomly divided into two groups: group A was combined da Vinci robotic thyroid surgery with monitors testing anesthesia depth and muscle relaxants (n=35); while group B underwent the traditional thyroidectomy with micro laparoscope (n=35).Changes of HR, MAP were observed at the time of pre-administration (T0), intubation (T1), cutting skin (T2), insufflating CO2(T3), separating tumors (T4), completing CO2insufflations (T5), extubation (T6). Dosage of drugs during surgery, awakening time and extubation time were observed during anesthesia. Results (1) Mean HR of two groups on each of all the other time points except T3were compared, the differences were all statistically significant (P<0.0001); the mean MAP of two groups on each time point were compared, the differences were all statistically significant (P<0.0001). (2) Mean HR of T1, T3, T5were compared with that of T0in group A, the differences were all statistically significant (P<0.008); the other time points except T3were all compared with that of T0, the differences were statistically significant in group B (P<0.008). (3) Mean MAP on each of the other time points except T3were compared with that of T0in group A, the difference were statistically significant (P<0.008); mean MAP of all time points were compared with that of T0in group B, the differences were statistically significant (P<0.008). (4) The dosages of propofol, atracurium in group A was less than those of group B, the differences were statistically significant (P<0.05); there was no statistically significant difference in the dosage of fentanyl between two groups; the time of awakening and extubation in group A were both shorter than that in group B, the differences were statistically significant (P<0.05). Conclusions The method of using muscular relaxation monitor to test the anesthesia depth during da Vinci robotic surgery can effectively monitor HR and MAP, reduce the amount of general anesthetic, shorten the time of postoperative revival with high safety, and provide better monitoring for depth of anesthesia and level of muscular relaxation.
monitoring anesthesia depth and muscle relaxants; da Vinci surgical system; thyroid surgery
10.13919/j.issn.2095-6274.2015.05.004
鞏 晶,本科學歷,醫師,E-mail:1085292180@qq.com
250031,濟南軍區總醫院麻醉科
R614.2;R653
猜你喜歡
音樂探索(2022年2期)2022-05-30 21:01:37
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
河北畫報(2020年10期)2020-11-26 07:20:50
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:46
