基于PLC的氣動抓取式工業機械手設計研究
2015-05-30 05:06:04平艷玲劉波
科技創新與應用 2015年30期
關鍵詞:設計研究
平艷玲 劉波
摘 要:機械手在設計過程中,注重其自動化控制,能夠實現一些較為復雜的工業操作。文章對氣動抓取式工業機械手設計的研究,主要是基于PLC自動化控制下的抓取式機械手的設計分析,注重提升機械手的靈活性和智能性,以期更好地實現工業發展自動化。
關鍵詞:PLC控制;工業機械手;設計研究
前言
工業生產領域中,很多工業操作靠人工是無法完成的,并且,一些操作具有較大的危害性,因此,要想實現工業生產目標,保證工人施工安全,工業機械手得到了較為廣泛的應用。工業機械手可以進行一些高溫、有毒環境下的工業生產,極大程度上保證了工人安全,同時也在很大程度上減緩了工人的勞動強度。基于PLC的氣動抓取式工業機械手設計,將注重相關程序的具體應用,注重把握機械手設計的靈活性和自動性特征,通過一系列編程控制,更好地實現機械手的實際效用。PLC氣動抓取式機械手,具有較高的可靠性,并且編程簡單、功能強大,延伸和擴大了人的手足和大腦功能,更加廣泛地應用于工業生產中。
1 氣動抓取式工業機械手的構成分析
基于PLC的氣動抓取式工業機械手設計,需要具有較高的靈活性和自動化發展特征,能夠根據相應的程序設計,滿足實際生產需要。因此,在進行設計過程中,氣動抓取式工業機械手應包含以下幾部分:執行機構:執行機構是氣動抓取式工業機械手的重要組成部分,包括了手部、手腕、手臂和立柱等部件,是機械手完成生產目的的關鍵部分;氣動驅動系統:氣動驅動系統是指揮機械手完成工業生產的重要部分,利用氣體壓力進行驅動,使機械手完成任務;控制系統:控制系統相當于機械手的大腦,對機械手執行任務進行指令下達。一般來說,氣動抓取式工業機械手的控制系統,主要以PLC自動化工業控制系統為主;相關檢測裝置:檢測裝置是進行位置調節的裝置,通過檢測裝置可以更好地確定抓取目標,為實現抓取目的提供依據。機械手的構成,以PLC控制系統進行指令下達,之后由氣動驅動系統進行機械能傳輸,使執行機構能夠進行實際行動,并且根據位置檢測裝置,進行目標操作[1]。
2 基于PLC的氣動抓取式工業機械手設計研究
2.1 設計要點
基于PLC的氣動抓取式工業機械手在設計過程中,要注重機械手的抓取性能,在實際工作中,能夠實現快、準、狠的工作效果。機械手設計過程中,手臂的運行方式有所不同,在進行手臂設計時,需要考慮到生產的實際情況,使機械手設計能夠與生產實際狀況符合。關于PLC氣動抓取式工業機械手設計,要把握以下幾點:第一,機械手臂設計時,坐標可分為直角坐標式、球坐標式、關節式等方式。第二,手臂的升降、收縮和回轉運動要保證靈活性,能夠較好地適應生產和抓取情況。第三,手臂的上下升降、左右旋轉、上下擺動動作要具有較好的靈活性。第四,手臂要保證五個自由度,符合抓取需要。
2.2 設計方案
文章對基于PLC的氣動抓取式工業機械手的設計研究,將從手指、手腕、手臂、三個方面進行。
手指設計分析:機械手在設計過程中,要具有較好的通用性能,能夠進行有效的更換,以實現設計的效率性和多用性。手指在設計過程中,主要以氣動抓取方式為主。氣動機械手是用壓縮空氣為動力源的機械手。其特點是方便、輸出力小、氣動迅速。但是由于空氣的可壓縮性使其運送過程不穩定,抓取力控制在三十公斤以下。手指設計時,要有足夠的握力并且手指間具有對應的開閉角,能夠對工件進行準確定位。
手腕設計分析:手腕設計時,同樣要以生產實際需要為主,手腕要具有較好的靈活性,更好地滿足生產需要。設計時,若是抓取的物件是水平放置,則可以設置成為上下擺動的形式即可,若是抓取物件存在一定的復雜性,就需要將手腕設計成“球坐標式”,能夠進行有效地活動,從而完成抓取工作[2]。
手臂設計分析:機械手臂在設計過程中,要保證其具有較大的靈活性。手臂是進行抓取工作的重要設計點,其速度關系到了機械手手指的抓取速度,文章對機械手臂的設計參數為最大移動速度為1.0m/s,回轉速度為90°/s,移動速度為0.8m/s。手臂設計要具有速度性,它是實現抓取效率的關鍵部位。
2.3 控制設計
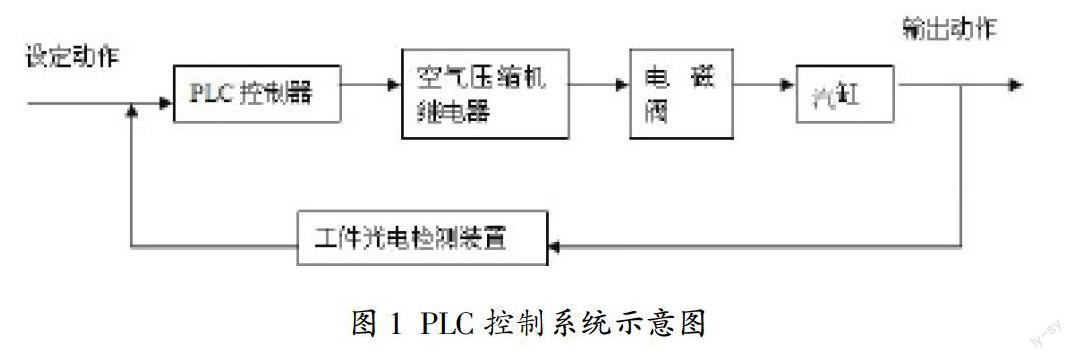
控制設計是基于PLC的氣動抓取式機械手設計的難點,具有較大的復雜性,同時,控制設計也關系到了機械手能否發揮真正的作用。在控制設計過程中,需要考慮到機械手的通用性,并且采用點位控制方式,實現精確控制。控制設計時,要注重PLC工業自動化控制系統的應用。關于利用PLC自動化控制系統進行機械手控制的問題,如圖1所示[3]。
PLC在實現這一目標時,需要通過程序編制,并且對程序進行執行處理,才能實現。PLC應用于氣動抓取式機械手設計時,主要涉及到了以下設備裝置:中央處理器、系統存儲器、用戶存儲器、電源、編程器五大部分。這五個部分當中,中央處理器是PLC系統的核心,對氣動抓取式機械手進行控制,電源、線路是實現PLC系統進行相關程序操作的關鍵。同時,編程器、系統存儲器、用戶存儲器之間,需要通過I/O信號輸入,才能實現效果。
PLC控制作用發揮時,需要事先有PLC系統進行命令發布,并且通過總機的數據處理系統,將指令進行傳達,實現信號輸送。關于PLC的氣動抓取式機械手的工作情況,主要如下:機械手位于初始位置,受到控制系統控制,執行系統將推動機械手進行運動。同時,機械手各個主要部位受到執行系統控制,執行系統通過完成主系統下達的任務,進行機械手控制,完成機械手操作任務。基于PLC的氣動抓取式工業機械手設計,將更加廣泛的應用于自動化生產線。國外很多國家已將其成功的應用于成套的自動化生產設備中。機械手未來的發展,將朝著自動化、智能化、網絡化的發展方向邁進,將更好的代替人從事高危險、高危害的工作環境,實現生產管理的智能化和自動化。
3 結束語
綜上所述,文章主要分析了基于PLC的氣動抓取式機械手的設計原理、設計方案、控制設計三個部分內容,并就氣動抓取式機械手的特點進行了分析,實現了氣動抓取式機械手的設計。氣動抓取式機械手在工業生產過程中起到了重要的輔助作用,在實際設計過程中,必須注重這一點,使機械手設計能夠更好地促進工業生產的發展和進步,滿足我國現代工業更加自動化、智能化的發展需要。
參考文獻
[1]蔣浩.基于PLC的工業機械手運動控制系統設計[D].南京信息工程大學,2012.
[2]張海英.基于PLC的氣動吸盤式工業機械手設計[J].液壓氣動與密封,2013,3:74-76.
[3]程錦鋒.基于PLC控制及氣動驅動的工業機械手的設計與實現[J].職業,2013,9:99-102.
[4]孫燕良,張厚江,翟艷鳳,等.基于PLC氣動機械手的研究設計[J].森林工程,2011,3:45-50.
猜你喜歡
中國科技縱橫(2016年20期)2016-12-28 17:43:24
未來英才(2016年1期)2016-12-26 21:00:06
電子技術與軟件工程(2016年19期)2016-12-19 17:39:39
藝術科技(2016年10期)2016-12-14 19:20:44
考試周刊(2016年93期)2016-12-12 09:51:52
北方文學·中旬(2016年9期)2016-12-08 12:07:31
中國科技縱橫(2016年17期)2016-11-30 21:39:20
繼續教育(2016年11期)2016-11-24 20:05:00
數字技術與應用(2016年9期)2016-11-09 23:36:50
文藝生活·下旬刊(2016年10期)2016-11-03 00:02:16
