新型混合勵磁導向裝置工作機理與參數設計
2015-11-16 09:04:46劉亞平許孝卓封海潮汪旭東
電工技術學報 2015年2期
劉亞平 許孝卓 封海潮 汪旭東
(河南理工大學電氣工程與自動化學院 焦作 454000)
0 引言
隨著現代建筑物高度的不斷增加,需要配置更高速的電梯,傳統的機械導輪滑靴導向方式已不滿足實際運行的需要。受到導靴摩擦力限制,轎廂運行速度難以大幅提高,在高速運行過程中,導靴的磨損嚴重,維護量大,同時由偏差和錯位引起的振動和噪聲影響了乘坐的舒適性[1,2]。基于此,文獻[3]提出了非接觸型電磁導軌。與傳統機械導向裝置相比,電磁導軌不需要潤滑,電梯可以更高速的運行,同時通過電磁調節控制導向裝置的阻尼率,可以大幅改善乘坐舒適性[4-9]。因此非接觸電磁導軌在提升機、電梯等高速運動領域有廣闊的應用前景[10,11]。文獻[12]提出了一種利用U形電磁鐵實現非接觸的磁懸浮導向裝置及電梯裝置,其采用8個對角布置的電磁導向裝置來保持轎廂穩定運行狀態,雖然實現了轎廂的非接觸運行,但所用電磁鐵數量多、占用空間大、電能損耗大。文獻[13]分析了采用混合勵磁結構的U形混合磁懸浮裝置,并討論了永磁厚度對裝置性能的影響。文獻[14]提出一種 E形混合勵磁裝置,其中永磁體分別安裝在3個鐵臂的頂部,電磁線圈位于中間鐵臂上,該結構磁路的漏磁較少,但永磁和電勵磁共用同一磁路。Rudiger Appunn等人提出了ω型混合勵磁裝置[15],相比于傳統的U形驅動機構,它可產生三個方向調節磁力,但永磁體直接位于氣隙表面,這對氣隙磁壓降的計算影響較大且漏磁多。2010年,文獻[16]提出了F形混合勵磁裝置,該結構采用梯形軛,永磁體的磁極面積增大,產生的磁力增大,但增加了永磁體的用量,體積大。
本文提出一種雙C形混合勵磁非接觸電梯導向裝置,采用磁路法推導電磁力的解析表達式,并建立有限元分析模型,對比分析特性和電磁力-電流特性,設計該新型裝置的電磁和結構參數。在該裝置中,永磁體安裝在鐵軛的內部,這樣便于安裝而且厚度容易調節。另外該結構中永磁磁路和控制磁路相互獨立,控制磁路不通過永磁體,具有控制電流小、功耗低、控制簡單、占用空間小、可以實現x方向和y方向電磁力的獨立調節的優點,可用于提升機、電梯等高速、低功耗的電磁導向領域。
1 混合勵磁導向裝置的結構與工作原理
新型混合勵磁導向裝置的基本結構如圖 1所示,該裝置在應用實例的俯視圖如圖2所示。

圖1 混合勵磁導向裝置結構1—左軛鐵 2—右軛鐵 3—永磁體 4—導軌 5—左線圈繞組6—右線圈繞組 7—左齒 8—右齒 9—氣隙1 10—氣隙2 11—氣隙3 12—氣隙4Fig.1 Structure of hybrid excitation guiding device
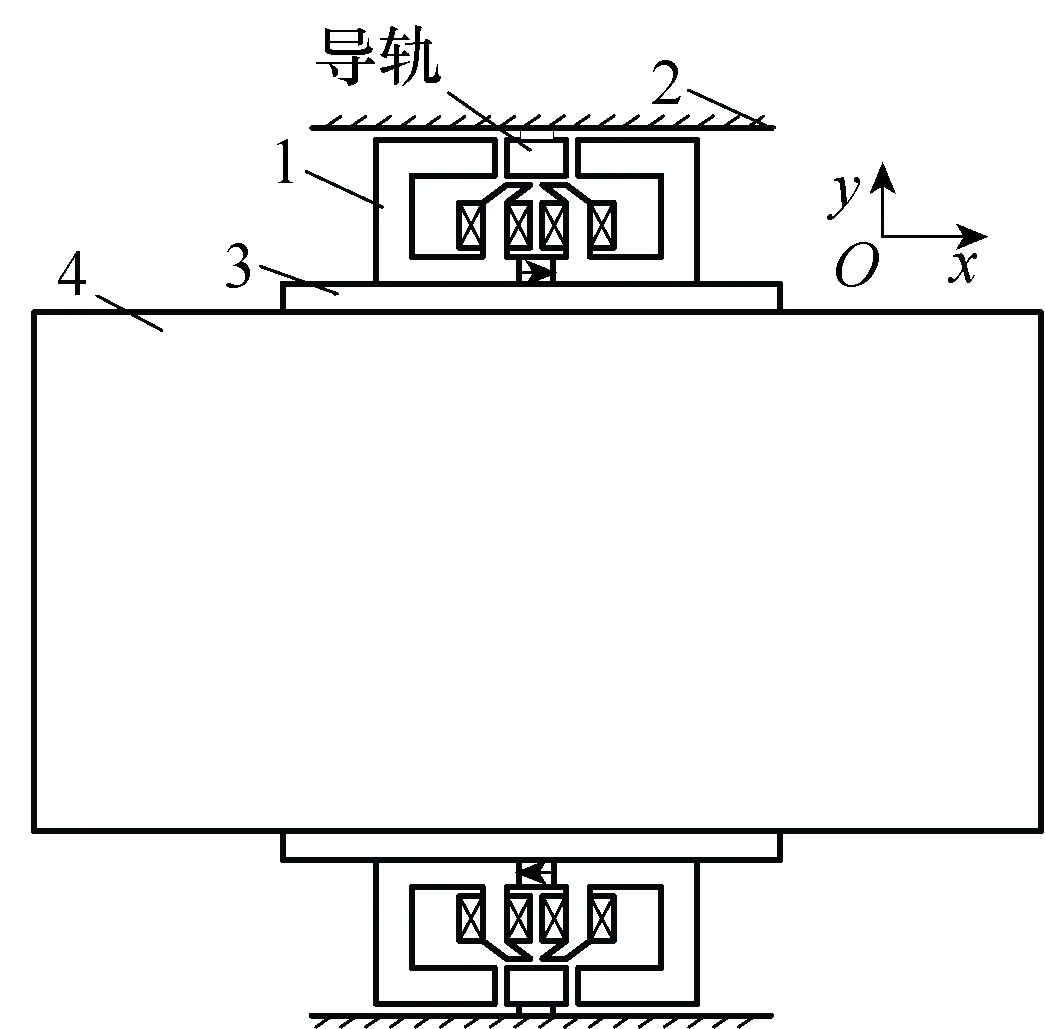
圖2 電梯導向裝置俯視圖1—導向組件 2—電梯井道 3—非導磁基座 4—轎廂Fig.2 Top view of guiding device for elevators
由圖1可見,新型混合勵磁導向裝置包括導軌和導向組件。導向組件由左軛鐵、右軛鐵、永磁體、左繞組、右繞組、左齒和右齒組成。右軛鐵與左軛鐵為C形槽狀體,呈對稱設置,且兩者通過永磁體無縫隙連接在一起。控制繞組安裝在左軛鐵和右軛鐵內部,起到保護控制繞組的作用。圖2中,導軌安裝在電梯轎廂四個角上,非導磁基座將導向裝置連接到轎廂架上,起到防止永磁磁場漏磁的作用。
新型混合勵磁導向裝置的基本工作原理如圖 3所示。永磁磁路一路經過永磁體、左軛鐵、氣隙1、導軌、氣隙2和右軛鐵;另一路經過永磁體、左齒、氣隙 3、導軌、氣隙4和右齒。控制磁路一路經過左齒、氣隙3、導軌、氣隙1、左軛鐵;另一路經過右齒、氣隙4、導軌、氣隙2、右軛鐵。控制磁路和永磁磁路在氣隙1、2、3、4中均有重疊,控制磁路不經過永磁體。為了便于分析,將導向組件的受力與位移等效為導軌的受力與位移。當只有永磁體作用時,永磁磁路2通過氣隙1和氣隙2的磁通量大小相等,產生的吸力方向相反,假設導軌此時處于平衡位置。因為磁場產生的吸力與磁通量成正比,所以導軌在x方向上受到的合力為0;永磁磁路 1在氣隙3和氣隙4中的磁通量大小相等,產生的吸力方向相同,導軌受到y方向的力。

圖3 混合勵磁導向裝置磁路Fig.3 Magnetic circuit of hybrid excitation device
當導軌受到外界一個+x方向的擾動后,氣隙2變小,氣隙1變大,氣隙2的磁通密度大于氣隙1磁通密度,導軌受到+x方向的吸力大于?x方向的吸力,在合力的作用下導軌將向+x方向運動。在磁場沒有飽和的情況下,控制繞組中同時通入相同的控制電流,控制電流產生的控制磁通使得氣隙2磁通量減少,氣隙1的磁通量增加,導軌在合力的作用下將被拉回到平衡位置。另外可以得到大小相等、方向相反的控制電流可以調節y方向的磁力。同理,若導軌受到其他方向的擾動時,也可得出類似結論。
因此,在磁場沒有飽和的情況下,導軌受到任何方向的擾動,只要調節控制電流的大小和方向,產生的合力都會將導軌拉回到平衡位置。在導向裝置中利用位移傳感器檢測出運動體的位移,控制器實現位移信號和控制信號之間的轉換,最后功率放大器將控制信號轉變為控制電流,控制電流產生控制磁通,實現運動體位置偏移的電磁調節。
2 磁路模型及性能計算
不考慮磁路飽和,將第1節中描述的磁路分解為如圖4a和圖4b所示的永磁磁路和控制磁路圖。
圖4中,Ri(i=1 ,2,3,4)為氣隙i的磁阻;Fm為永磁體對外表現的磁動勢;φi為永磁體產生的通過氣隙i的磁通量;φm為永磁體產生的總磁通量;Ia、Ib分別為流過控制繞組a、b的電流;φa、φb為控制繞組a、b產生的控制磁通量;N為線圈的匝數;Fa=NIa、Fb=NIb分別為控制繞組a、b產生的電磁磁動勢。
永磁體工作點在回復線上,將其等效為一個恒定磁動勢和一個磁阻的串聯。根據永磁體的工作曲線,可得到

式中,Bm為永磁材料的磁通密度;Hm為磁場強度;0μ為真空磁導率;μr為相對磁導率;Br為剩磁;Lm為永磁體磁化方向長度;Am為永磁體的橫截面積;Fc為永磁體的虛擬內稟磁動勢。利用基尓霍夫定律得

式中,Ai為氣隙i的橫截面積;D為軸向長度;Li為修正后氣隙i的長度;ai為氣隙i的高度;Si為氣隙i的長度。當導軌處于平衡位置時,氣隙1和2的長度相同,都為S,x為其水平位移量;氣隙3和4的長度相同,都為h,y為其垂直位移量;Fi為氣隙i的磁動勢。
氣隙的磁能密度及存儲的磁能為

由能量虛位移法可以得到

式中,B為氣隙磁通密度;H為磁場強度;A為氣隙面積;V為氣隙體積;L為氣隙長度。當控制繞組中同時通入正向電流時,由式(13)可以得到x、y方向的吸力分別為

由式(14)可以得出,當φ2=φb時水平方向吸力最大。
將Fx進行線性化處理并忽略二次以上的高階導數,分析不同位移與電流情況下,電磁力-位移特性和電磁力-電流特性。
當x≠0,Ia=Ib=0時,水平力與位移關系為

當x=0,Ia=Ib=I時,水平力與電流的關系為

3 混合勵磁導向裝置的參數設計
3.1 氣隙磁通密度的確定
為使導軌在+x方向某一位置受到的水平力最大,氣隙2的控制磁通和永磁磁通疊加產生的磁通密度接近飽和磁通密度Bmax,氣隙1的控制磁通和永磁磁通相減應為0。參考一般軟磁材料磁化曲線的線性范圍,將氣隙磁通密度設為1.2T,氣隙3的永磁磁通密度與控制磁通密度之和應不大于飽和磁通密度,即B3+Bay≤1 .2T 。可以求得氣隙1的永磁磁通密度和控制磁通密度相等,即B1=Bax。為了減少控制繞組的匝數和功率損耗,在此取氣隙1的控制磁通密度稍小于飽和磁通密度的一半。
3.2 氣隙2橫截面積的確定
由水平磁力的公式可推出氣隙2橫截面積為

式中,B2為氣隙2的永磁磁通密度;Bbx為控制磁通密度,根據最大水平磁力的要求,可確定氣隙 2的橫截面積。
3.3 氣隙1和氣隙2磁通量的確定
根據已知的氣隙1和氣隙2的永磁磁通密度和橫截面積,可以確定氣隙1和氣隙2的永磁磁通量和控制磁通量,即

3.4 氣隙3和氣隙4橫截面積的確定
由式(18)得到右繞組控制磁通量和氣隙4的控制磁通密度,可確定氣隙3和氣隙4橫截面積為

3.5 氣隙3和氣隙4永磁磁通量的確定
根據式(19)求出氣隙3的橫截面積,可得到氣隙3和氣隙4的永磁磁通量為

3.6 氣隙1、氣隙2和氣隙3的確定
根據式(18)~式(20),可得到氣隙1和氣隙2的長度關系式為

且二者長度滿足:S1=S?x,S2=S+x。
當確定了最大水平偏移量x,代入式(21)中,可得到導軌位于平衡位置時的氣隙長度S,進而確定氣隙1和氣隙2的長度S1、S2。
根據式(18)~式(20),得到氣隙3的長度為

3.7 永磁體的確定
該結構中主要確定永磁體的磁化方向長度的橫截面積,永磁材料采用銣鐵硼,常溫下,其退磁曲線在拐點以上基本為直線。
若Hc為矯頑力,退磁曲線可以表示為

由Fm=Hhm可以計算出永磁體磁化方向長度,由φm=BAm可以計算出永磁體的橫截面積。
4 有限元仿真及實驗
設計要求水平方向最大的磁力為800N,最大水平位移量x為0.5mm。按照上述解析式可以確定混合勵磁導向裝置的結構參數見表 1,同時加工了樣機主體,如圖5所示。
采用有限元方法建立電磁場分析模型,驗證前述磁路法參數設計的合理性。為了降低求解規模和時間,作如下假設:忽略z方向(即軸向拉伸方向)磁場的變化,認為每個截面的磁場分布都是相同的。忽略控制繞組和永磁體橫向端部的漏磁,可將三維(3D)磁場分析簡化為二維(2D)。

表1 樣機主要參數Tab.1 Primary parameters of prototype

圖5 樣機實物Fig.5 The prototype
圖6為導軌在最大水平位移,只存在永磁磁場即控制電流為0A時,混合勵磁導向裝置的磁場圖和磁通密度密圖,此時,氣隙 1的磁通密度約為0.4T,氣隙2的磁通密度約為0.57T。圖7為在最大水平位移,控制電流最大時,控制磁場的磁場圖和磁通密度圖。由磁力圖可以看出,控制磁場不通過永磁體,這在一定情況下,可以減少永磁體退磁現象的發生。由磁通密度圖可知,氣隙1的控制磁通密度約為0.38T,小于飽和磁通密度的一半,氣隙2的控制約為0.61T,氣隙 1和氣隙 2的永磁磁通密度和控制磁通密度基本相等,符合設計要求。

圖6 永磁磁場與氣隙磁通密度Fig.6 Permanent magnetic field and density of air gap
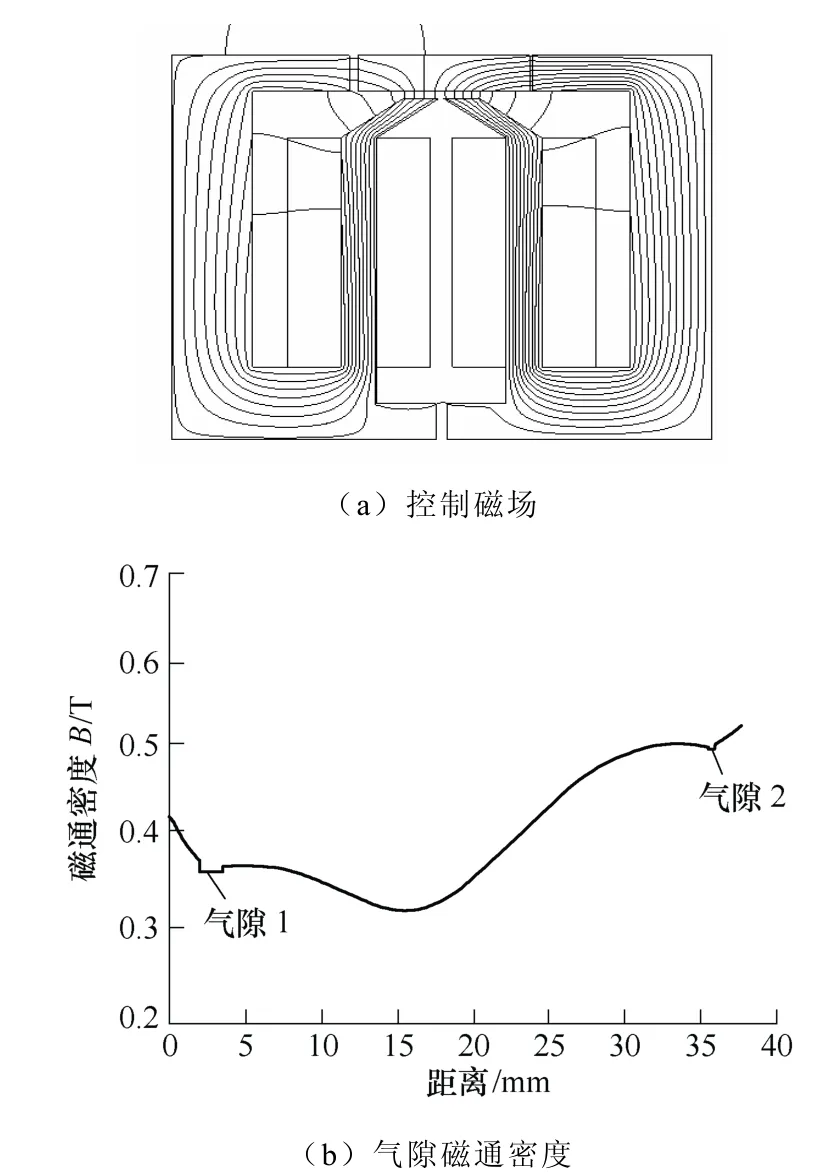
圖7 控制磁場與氣隙磁通密度Fig.7 Controlled magnetic field and density in air gap
圖8為在最大水平位移時,永磁磁場和控制磁場共同作用的混合磁場圖和混合磁通密度圖。由圖可知,氣隙1的磁通密度由0.4T減小到0.09T,這是因為氣隙1中仍然有較少的磁通通過。氣隙2的磁通密度由0.57T增加到1.2T,此時導軌受到的最大磁力為830N,符合設計要求。
圖9為在不同水平位移下,電流與水平力的關系。當水平位移為0時,電流越大,水平力越大,電流與水平力成正比;在水平位移為0.5mm時,電流為0時,水平力并不為0,而是有初值,位移越大,初值越大;同一電流下,水平力隨水平位移的增大而增大。


圖8 混合磁場與磁通密度Fig.8 Hybrid magnetic field and magnetic density

圖9 電流與水平力的關系Fig.9 Force variation with current
圖10為電流為0時,水平位移與水平力的關系圖。由圖可以看出,隨著水平位移的增加,水平力成比例的增加。當有較大的位移時,水平力與水平位移仍然保持較好的線性關系,這說明該結構控制規律簡單。在水平位移為0時,導軌受到的磁力為幾乎0,這與前面的理論分析一致。
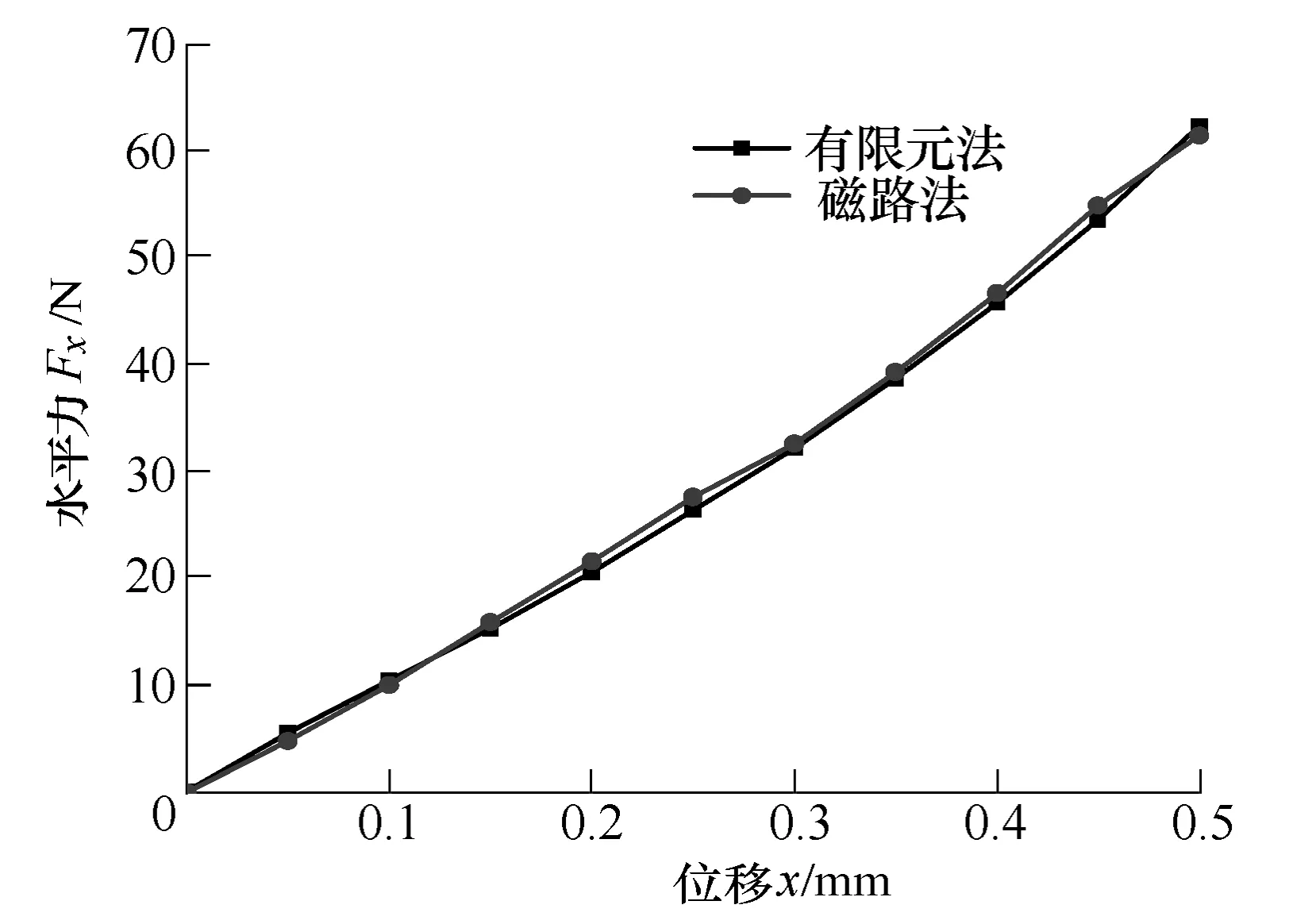
圖10 水平位移與水平力Fig.10 Force variation with horizontal displacement
為了驗證計算結果的合理性,對加工完成的樣機進行了初步的靜態磁場和電磁力測試。采用lakeshore磁場測試儀測試在不同水平位移和不同控制電流下氣隙1的混合磁通密度,測試結果見表2。可見,磁路法計算值和有限元仿真值和實驗測試值吻合較好。

表2 磁場測試及對比Tab.2 Test and comparison of magnetic field
圖11為在相同控制電流時,電磁力對比結果,由圖可知,水平力的變化趨勢一樣。在同一位移下,3D模型中的水平力略大于2D模型,主要由于在2D模型中沒有考慮控制繞組的端部效應,但誤差小于0.85%,說明采用2D磁場分析是合理的。同時,實驗測試值均比二維和三維計算值略小,主要由于實際采用的永磁性能和仿真值存在一定的偏差,但變化趨勢基本一致。

圖11 水平力對比Fig.11 Comparison of horizontal force
5 結論
本文提出一種新型混合勵磁導向裝置,闡述了其基本結構和工作原理。利用等效磁路法,得到了不同電流和位移下水平方向的磁力表達式。利用磁通量法對新型混合勵磁導向進行了參數設計,同時多角度討論了電流、位移和磁力三者之間的作用關系。有限元計算和實驗結果驗證了理論分析和參數設計的正確性,為該類混合勵磁導向裝置的控制策略的分析奠定了基礎。
[1] Ugur Hasirci,Abdulkadir Balikci,Zivan Zabar.A novel magnetic-levitation system:design,implementation,and nonlinear control[J].IEEE Transactions on Plasma Science,2011,39(1):492-497.
[2] Lee J D,Duan R Y.Cascade modeling and intelligent control design for an electromagnetic guiding system[J].IEEE Transactions on Mechatronics,2011,16(3):470-478.
[3] 金丹,于躍慶.電-磁混合勵磁裝置:中國,CN86107654[P].1988-05-25.
[4] Schmulling B,Appunn R,Hameyer K.Electromagnetic guiding of vertical transportation vehicles:state control of an over-determined system[C]//International Conference on Electrical Machines,Vilamoura,Portugal,2008:863-868.
[5] 趙旭升,鄧智泉,王曉琳,等.永磁偏置磁軸承的研究現狀及其發展[J].電工技術學報,2009,24(9):9-20.
Zhao Xusheng,Deng Zhiquan,Wang Xiaolin,et al.Research status and development of permanent magnet biased magnetic bearings[J].Transactions of China Electrotechnical Society,2009,24(9):9-20.
[6] 趙旭升,鄧智泉,汪波.永磁偏置徑向磁軸承的原理分析與參數設計[J].電工技術學報,2011,26(11):127-134.
Zhao Xunshen,Deng Zhiquan,Wang Bo.Principle analysis and parameter design of permanent magnet bias radial magnetic bearing[J].Transactions of China Electrotechnical Society,2011,26(11):127-134.
[7] 汪波,鄧智泉,趙旭升,等.基于精確磁路的永磁偏置軸向徑向磁軸承設計[J].中國機械工程,2012,23(17):2036-2047.
Wang Bo,Deng Zhiquan,Zhang Xushen.Design of permanent magnet biased axial-radial magnetic bearing based on accurate magnetic circuit[J].China Mechanical Engineer,2012,23(17):2036-2047.
[8] Takashi T,Takashi Y.Optimal design of hybrid magnet in maglev system with both permanent and electro magnet[J].IEEE Transactions on Magnetics,1993:1783-1786.
[9] 孫津濟,房建成,王曦,等.一種新型結構的永磁偏置徑向磁軸承[J].電工技術學報,2009,24(11):53-60.
Sun Jinji,Fang Jiancheng,Wang Xi,et al.A new permanent magnet biased radial magnetic bearing[J].Transactions of China Electrotechnical Society,2009,24(11):53-60.
[10] 梅磊,鄧智泉,趙旭升,等.新結構混合型徑向磁懸浮軸承[J].電工技術學報,2009,24(5):13-18.
Mei Lei,Deng Zhiquan,Zhao Xusheng,et al.New configuration hybrid radial magnetic bearing[J].Transactions of China Electrotechnical Society,2009,24(5):13-18.
[11] Babuska V,Beatty S M,deBlonk B J.A review of technology developments in flywheel attitude control and energy transmission systems[C]//IEEE Aerospace Conference,2004:2784-2800.
[12] 胡慶,于海雁,于冬梅,等.磁懸浮電梯導向裝置及其控制方法:中國,CN102689830A[P].2012-06-15.
[13] Liu T J,Ma X J,Liu B W.Dynamic characters of hybrid maglev systems with different thickness permanent magnets[C]//IEEE International Conference on Mechatronics and Automation,Xi’an,China,2010:1336-1339.
[14] Tzeng Y,Wang T C.Optimal design of the electromagnetic levitation with permanent and electro magnets[J].IEEE Transactions on Magnetics,1994,30(6):4731-4733.
[15] Appunn R,Schmülling B,Hameyer K.Electromagnetic guiding of vertical transportation vehicles:experimental evaluation [J].IEEE Transactions on Industrial Electronics,2010,57(1):335-343.
[16] Zhang Z,She L,Zhang L,et al.Structural optimal design of a permanent-electro magnetic suspension magnet for middle-low-speed maglev trains [J].IET Electrical Systems in Transportation,2011,1(2):61-68.