磁極分段型表貼式永磁電機(jī)建模與分析
2015-11-25 09:35:38楊思雨夏長亮王慧敏史婷娜
電工技術(shù)學(xué)報(bào) 2015年2期
楊思雨 夏長亮, 王慧敏 史婷娜
(1.天津大學(xué)電氣與自動化工程學(xué)院 天津 300072 2.天津市電工電能新技術(shù)重點(diǎn)實(shí)驗(yàn)室(天津工業(yè)大學(xué))天津 300387)
0 引言
永磁電機(jī)因具有高效率、高轉(zhuǎn)矩密度、高轉(zhuǎn)矩電流比以及低維修成本等特點(diǎn),近年來在電動汽車、數(shù)字控制裝置以及機(jī)器人技術(shù)等高性能驅(qū)動領(lǐng)域得到了廣泛應(yīng)用。然而,定子齒部與永磁體相互作用所產(chǎn)生的齒槽轉(zhuǎn)矩以及定子電流與轉(zhuǎn)子磁場相互作用所產(chǎn)生的電磁轉(zhuǎn)矩波動[1-3],常引起電機(jī)振動及噪聲,降低驅(qū)動系統(tǒng)控制精度。因此,削弱轉(zhuǎn)矩波動是電機(jī)設(shè)計(jì)過程中需要重點(diǎn)考慮的問題。
從電機(jī)設(shè)計(jì)角度考慮,削弱轉(zhuǎn)矩波動的主要方法包括極槽配合、極弧系數(shù)優(yōu)化、斜極或斜槽、增加輔助槽、磁極形狀優(yōu)化、槽口偏移等[4-8]。文獻(xiàn)[9]提出使用磁極分段的方法削弱永磁電機(jī)齒槽轉(zhuǎn)矩,并利用有限元算法得到了不同分段參數(shù)下的齒槽轉(zhuǎn)矩變化規(guī)律。磁極分段不會過于增加電機(jī)結(jié)構(gòu)的復(fù)雜性。對于直徑較大的永磁電機(jī),單塊磁極的制造有一定困難,磁極分段同時(shí)能夠降低電機(jī)制造成本。在文獻(xiàn)[9]的基礎(chǔ)上,文獻(xiàn)[10]結(jié)合有限元算法與近似氣隙磁路模型,對磁極分段型永磁同步電機(jī)進(jìn)行了分析與優(yōu)化。文獻(xiàn)[11]采用簡化氣隙磁場模型結(jié)合特定諧波消除法確定磁極分段參數(shù)。
磁極分段會使得電機(jī)磁場發(fā)生畸變,增加磁場分析的復(fù)雜性。由于有限元方法的建模過程較為復(fù)雜,因此建立磁極分段型永磁電機(jī)的解析模型有助于分析電機(jī)性能隨磁極分段參數(shù)的變化規(guī)律,對于提高電機(jī)性能具有重要意義。精確子域模型[12-15]能夠考慮定子槽間相互影響,對永磁電機(jī)定子開槽后的磁場進(jìn)行準(zhǔn)確計(jì)算。
本文在推導(dǎo)分段磁極磁化強(qiáng)度的基礎(chǔ)上對精確子域模型進(jìn)行擴(kuò)展,針對徑向與平行充磁條件下任意磁極分段數(shù)目的表貼式永磁電機(jī)(Surface Mounted Permanent Magnet Machines,SMPM),將永磁體、氣隙、定子槽口以及定子槽身作為研究區(qū)域,對矢量磁位進(jìn)行求解,并計(jì)算各區(qū)域內(nèi)磁場分布,進(jìn)而對電機(jī)齒槽轉(zhuǎn)矩與相反電動勢進(jìn)行計(jì)算。該模型適用于永磁體平行與徑向充磁方式下的磁極分段型表貼式永磁電機(jī)。文中以4 極24 槽與8 極12 槽永磁電機(jī)為例,研究了電機(jī)性能隨磁極分段數(shù)目與磁極分段位置等參數(shù)的變化規(guī)律,為磁極分段型永磁電機(jī)的設(shè)計(jì)與優(yōu)化提供參考。
1 磁場解析模型
本文基于考慮齒尖影響的精確子域模型,推導(dǎo)磁極分段條件下永磁體磁化強(qiáng)度表達(dá)式,并對矢量磁位拉普拉斯/泊松方程進(jìn)行求解,進(jìn)而對齒槽轉(zhuǎn)矩以及相反電動勢進(jìn)行計(jì)算。
1.1 解析模型的建立
為了便于對永磁電機(jī)的電磁特性進(jìn)行分析,首先作如下假設(shè):①永磁體相對磁導(dǎo)率為1;②忽略電機(jī)端部效應(yīng);③鐵心磁導(dǎo)率為無窮大,忽略電機(jī)飽和效應(yīng);④忽略定、轉(zhuǎn)子渦流效應(yīng);⑤每極磁塊分段寬度相等。
本文所建立磁極分段型表貼式永磁同步電機(jī)解析模型如圖1 所示。圖中,Rr為轉(zhuǎn)子鐵心外半徑;Rm為永磁體外半徑;Rs為定子鐵心內(nèi)半徑;Rt為定子槽頂部半徑;Rsb為定子槽底部半徑;boa為槽口處所對應(yīng)圓心角;bsa為槽身處所對應(yīng)圓心角;θi為第i 個(gè)槽中心線機(jī)械角度,r、θ 分別為圓心距與圓周角。在二維極坐標(biāo)系下將解析模型分為4 個(gè)區(qū)域:區(qū)域1 為永磁體;區(qū)域2 為氣隙;區(qū)域3i 為第i 個(gè)槽身;區(qū)域4i 為第i 個(gè)槽口。
在區(qū)域1 中,磁場密度B 可表示為


圖1 磁極分段型表貼式永磁同步電機(jī)解析模型Fig.1 Analytical model of SMPM with segmented pole
在區(qū)域2、3i、4i 中,磁場密度B 可表示為

式中,μ0為真空磁導(dǎo)率;μr為永磁體相對磁導(dǎo)率;H 為磁場強(qiáng)度;M 為永磁體磁化強(qiáng)度。
1.2 永磁體磁化強(qiáng)度計(jì)算
在永磁體域中,矢量磁位A 與永磁體磁化強(qiáng)度M 之間存在關(guān)系

在二維磁場中,矢量磁位僅包括垂直分量Az1,且滿足泊松方程

磁極分段型表貼式永磁電機(jī)每對極下永磁體分布如圖2 所示。

圖2 每極永磁體分布示意圖Fig.2 Schematic of PM distribution


當(dāng)αpm=1 時(shí),相當(dāng)于磁塊不分段的情況。令θmi為第i 塊分段磁塊對稱軸所對應(yīng)的機(jī)械角度,可表示為

分別對徑向充磁和平行充磁情況進(jìn)行分析,可知在每對極下磁化強(qiáng)度分布如下:
(1)在N 極第i 段磁塊處,即θmi-d2/2<θ<θmi+d2/2 時(shí),有

(2)在S 極第i 段磁塊處,即2π/p-(θmi+d2/2)<θ<2π/p-(θmi-d2/2)時(shí),有

(3)在磁極分塊間隙處,即θ 為其他值時(shí),有

式中,Mr、Mθ為分別為磁化強(qiáng)度徑向與切向分量。
在整個(gè)圓周范圍內(nèi)對永磁體磁化強(qiáng)度分布進(jìn)行傅里葉分解可得:對于徑向充磁,有

則式(4)中Mr與Mθ可表示為

式中,Mrsk、Mrck、Mθsk、Mθck分別為磁化強(qiáng)度在徑向與切向上的正弦和余弦分量幅值;ωr為轉(zhuǎn)子角速度;t 為時(shí)間;θ0為轉(zhuǎn)子初始位置;k 為各諧波次數(shù)。
1.3 矢量磁位與磁場分布求解
在區(qū)域1 中,矢量磁位滿足式(3)給出的泊松方程;在區(qū)域2、3、4 中,矢量磁位均滿足拉普拉斯方程

故在圖1 所示各區(qū)域中,矢量磁位通解可表示如下。
(1)在永磁體域1 內(nèi),有

(2)在氣隙域2 內(nèi),有

(3)在第i 個(gè)槽身區(qū)域3i 內(nèi),有

(4)在第i 個(gè)槽口區(qū)域4i 內(nèi),有

式中,k、n、m 為對應(yīng)區(qū)域中各諧波次數(shù);A1k~D1k、A2k~D2k、C3in、D3in、C4im、D4im為待定系數(shù),可以通過式(27)中各區(qū)域磁場邊界條件解得。

各區(qū)域中磁通密度分布徑向分量 Br與切向分量Bθ可由式(28)計(jì)算得到。

1.4 齒槽轉(zhuǎn)矩與反電動勢計(jì)算
根據(jù)氣隙區(qū)域中磁通密度分布計(jì)算結(jié)果,可得電機(jī)齒槽轉(zhuǎn)矩Tcog與各相繞組反電動勢Ex分別為

式中,la為電機(jī)軸向長度;x 表示定子繞組A、B、C 相;ψx為各向磁鏈;Nc為每槽導(dǎo)體數(shù);a 為并聯(lián)支路數(shù)。
2 有限元驗(yàn)證
為驗(yàn)證本文所建立模型的準(zhǔn)確性,以磁極分段參數(shù)α′p=0.9、αpm=0.9 的永磁電機(jī)(電機(jī)參數(shù)見表1)為例,分別對4 極24 槽、nseg=4 以及8 極12 槽、nseg=3 的情況,利用本文所建立解析計(jì)算模型與商業(yè)電磁場有限元軟件對氣隙磁場、齒槽轉(zhuǎn)矩與相反電動勢進(jìn)行計(jì)算,對解析模型計(jì)算結(jié)果進(jìn)行驗(yàn)證,其結(jié)果如圖3~圖5 所示。
由圖3~圖5 的對比結(jié)果可以看出,對于兩種充磁方式的磁極分段型表貼式永磁電機(jī),利用所建立的解析模型計(jì)算得到的氣隙磁通密度、齒槽轉(zhuǎn)矩以及相反電動勢波形均與有限元分析結(jié)果相一致,驗(yàn)證了本文所建立的解析模型的有效性。由圖3 的氣隙磁通密度計(jì)算結(jié)果可以看出,磁極分段對于氣隙磁通密度的徑向和切向分量均具有較大的影響,在磁極分段處氣隙磁通密度各分量均存在尖峰,影響氣隙磁通密度分布,使波形產(chǎn)生畸變。由圖4 與圖5 的計(jì)算結(jié)果可以看出,由于充磁方式、極槽配合以及分段數(shù)目的影響,電機(jī)齒槽轉(zhuǎn)矩與相反電動勢的波形也會隨之發(fā)生變化。

表1 磁極分段型表貼式永磁電機(jī)基本參數(shù)Tab.1 Basic parameters of SMPM with segmented pole

圖3 電機(jī)氣隙磁通密度對比結(jié)果Fig.3 FE and analytical predicted air-gap flux density

圖4 齒槽轉(zhuǎn)矩對比結(jié)果Fig.4 FE and analytical predicted cogging torque

圖5 A 相反電動勢對比結(jié)果Fig.5 FE and analytical predicted back-EMF of phaseA
3 磁極分段型表貼式永磁電機(jī)性能分析
3.1 分段數(shù)目影響分析
為了分析磁極分段數(shù)目對電機(jī)性能的影響,利用本文所建立的磁場解析模型對每極分段數(shù)為1~6,磁極分段參數(shù)α′p=0.9、αpm=0.9 的永磁電機(jī)的齒槽轉(zhuǎn)矩以及反電動勢進(jìn)行計(jì)算,分別得到圖6 所示的齒槽轉(zhuǎn)矩(Tcog)波形以及表2 的反電動勢基波幅值(Ef)和總諧波畸變率(E_THD)的計(jì)算結(jié)果。
從圖6 所示的齒槽轉(zhuǎn)矩計(jì)算結(jié)果可以看出,磁極分段不會改變電機(jī)齒槽轉(zhuǎn)矩周期。對于4 極24槽永磁電機(jī),當(dāng)nseg=2,3,5,6 時(shí),齒槽轉(zhuǎn)矩幅值相對于不分段情況均有不同程度的增加,而當(dāng)nseg=4時(shí),可以實(shí)現(xiàn)有效削弱齒槽轉(zhuǎn)矩的效果。對于8 極12 槽永磁電機(jī),當(dāng)nseg=4,5,6 時(shí),齒槽轉(zhuǎn)矩幅值相對于不分段情況并未有明顯變化,當(dāng)nseg=2 時(shí),可以有效削弱齒槽轉(zhuǎn)矩。此外,當(dāng)nseg=3 時(shí),齒槽轉(zhuǎn)矩幅值會有顯著增加,使電機(jī)性能惡化。因此,對磁極分段型永磁電機(jī)進(jìn)行設(shè)計(jì)時(shí),為了有效地削弱齒槽轉(zhuǎn)矩,需要針對不同極槽數(shù)合理選擇磁極分段數(shù)目,以實(shí)現(xiàn)優(yōu)化電機(jī)性能的目的。

圖6 不同分段數(shù)目下齒槽轉(zhuǎn)矩波形Fig.6 Cogging torque waveforms with different nseg
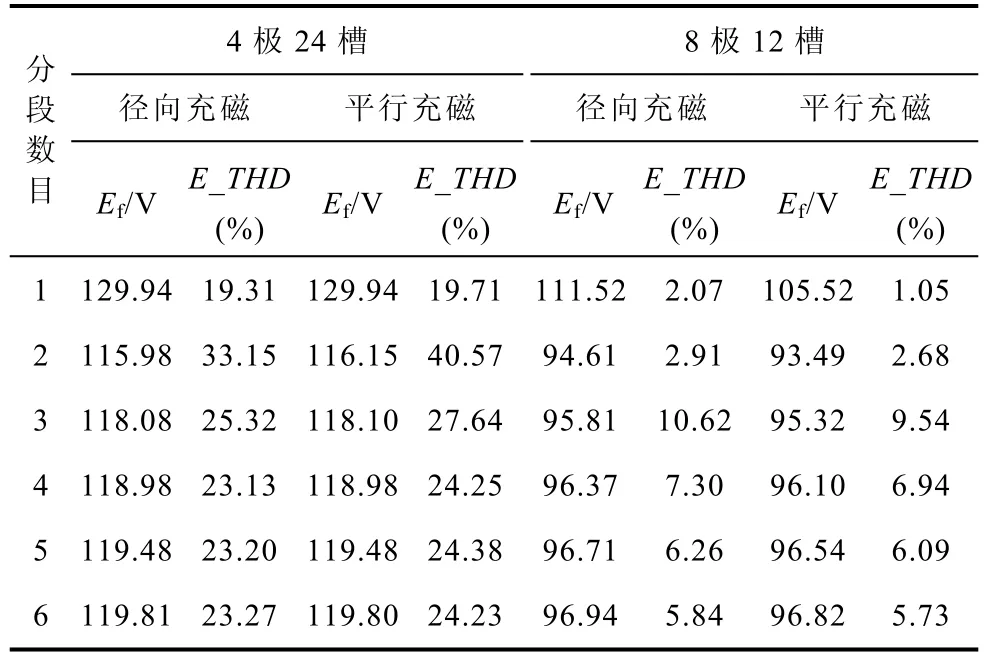
表2 不同分段數(shù)目下反電動勢基波幅值及總諧波畸變率Tab.2 Efand E_THD with different nseg
從表2 給出的不同分段數(shù)目下反電動勢基波幅值以及總諧波畸變率計(jì)算結(jié)果可以看出,對于兩種極槽配合的永磁電機(jī),磁極分段均會在不同程度上削弱反電動勢基波幅值,在電機(jī)設(shè)計(jì)中可以采用增加繞組匝數(shù)等方式加以彌補(bǔ)。此外,由反電動勢諧波含量計(jì)算結(jié)果可以看出:對于4 極24 槽電機(jī),當(dāng)nseg=2 時(shí),反電動勢諧波含量明顯增加;而對于8極12 槽電機(jī),當(dāng)nseg=3 時(shí),反電動勢諧波含量同樣明顯高于采用其他分段數(shù)的電機(jī)。因此,在進(jìn)行磁極分段式永磁同步電機(jī)設(shè)計(jì)時(shí),需要充分考慮磁極分段數(shù)目對于反電動勢的影響,使之對電機(jī)性能的不良影響降到最低。
3.2 分段位置影響分析
為了分析不同分段位置對電機(jī)性能的影響,利用所建立解析模型,分別以4 極24 槽、nseg=4 以及8 極12 槽、nseg=3 的磁極分段型永磁電機(jī)為例進(jìn)行分析,分別計(jì)算齒槽轉(zhuǎn)矩幅值(Tcog_max)及反電動勢諧波畸變率隨α′p以及αpm的變化規(guī)律,如圖7 與圖8 所示。

圖8 相反電動勢總諧波畸變率隨分段位置變化規(guī)律Fig.8 Variation of back-EMF THD with α′pand αpm
圖7 反映了兩種極槽配合下電機(jī)齒槽轉(zhuǎn)矩峰值隨分段位置變化規(guī)律。從圖7a 可以看出,對于4極24 槽電機(jī),nseg=4 時(shí),齒槽轉(zhuǎn)矩峰值隨α′p以及αpm的變化較為復(fù)雜,在α′p=0.9、αpm=0.8 以及α′p=0.75、αpm=0.75 附近存在極小值點(diǎn)。在α′p=0.9、αpm=0.8 的極小值附近時(shí),齒槽轉(zhuǎn)矩幅值變化較為平緩;在α′p=0.75、αpm=0.75 的極小值附近時(shí),齒槽轉(zhuǎn)矩幅值變化趨勢較大,說明此時(shí)若加工誤差不能滿足要求時(shí),會引起電機(jī)性能發(fā)生較大的改變。從圖7b 可以看出,對于8 極12 槽電機(jī),nseg=3 時(shí),當(dāng)α′p=0.9、αpm=0.75 時(shí),齒槽轉(zhuǎn)矩峰值達(dá)到極大值1.8N·m;當(dāng)α′p=0.75,αpm=0.95 時(shí),齒槽轉(zhuǎn)矩峰值達(dá)到極小值0.05N·m。由以上分析可知,對于不同極槽配合以及每極分段數(shù)的磁極分段型表貼式永磁電機(jī),當(dāng)α′p以及αpm的取值不同時(shí),會使得齒槽轉(zhuǎn)矩峰值出現(xiàn)較大變化,因此在設(shè)計(jì)時(shí)充分考慮不同參數(shù)對齒槽轉(zhuǎn)矩的影響。
圖8 給出了反電動勢諧波含量隨分段位置的變化規(guī)律。從圖8a 可以看出,對于4 極24 槽永磁電機(jī),反電動勢總諧波畸變率極小值點(diǎn)出現(xiàn)在α′p=0.7、αpm=1 處,此時(shí)相當(dāng)于磁極未分段情況,說明在這種極槽配合以及每極分段數(shù)條件下,磁極分段并不能改善反電動勢總諧波畸變率。從圖8b 可以看出,對于8 極12 槽電機(jī),反電動勢總諧波畸變率極小值點(diǎn)出現(xiàn)在α′p=0.75、αpm=0.95 處,此時(shí)反電動勢總諧波畸變率約為5%。由以上分析可知,參數(shù)α′p與αpm對于電機(jī)反電動勢總諧波畸變率具有較大的影響,這一點(diǎn)需要在設(shè)計(jì)時(shí)充分考慮,避免造成電機(jī)性能的削弱。
由以上分析可知,齒槽轉(zhuǎn)矩峰值與反電動勢總諧波畸變率隨參數(shù)α′p與αpm的變化規(guī)律并不一致,需要在多個(gè)性能指標(biāo)之間選擇平衡點(diǎn)。此外,在對磁極進(jìn)行分段時(shí),如果相關(guān)參數(shù)選擇不合理,可能會在氣隙磁場中引入高次諧波,使得電機(jī)齒槽轉(zhuǎn)矩增加,反電動勢諧波含量增大,電機(jī)性能無法得到改善,甚至惡化。因此,在對磁極分段型表貼式永磁電機(jī)進(jìn)行設(shè)計(jì)時(shí),需要合理選擇分段參數(shù),使之達(dá)到提高電機(jī)性能的效果。
4 結(jié)論
本文建立了磁極分段型表貼式永磁電機(jī)磁場解析模型,該模型適用于磁極均勻分段條件下具有任意分段數(shù)目的表貼式永磁電機(jī)。以4 極24 槽與8極12 槽電機(jī)為例,對磁極分段型表貼式永磁電機(jī)進(jìn)行分析。研究表明,對于不同極槽數(shù)的電機(jī),均存在特定的能夠顯著削弱齒槽轉(zhuǎn)矩的磁極分段數(shù)。另一方面,齒槽轉(zhuǎn)矩峰值與反電動勢諧波含量隨參數(shù)α′p與αpm的變化規(guī)律并不一致,在設(shè)計(jì)時(shí)需要充分考慮加工精度以及制造成本等因素合理選擇磁極分段參數(shù)。
[1]Islam M S,Mir S,Sebastian T.Issues in reducing the cogging torque of mass produced permanent magnet brushless DC motor[J].IEEE Transactions on Industry Applications,2004,40(3):813-820.
[2]韓雪巖,陳全文,陳萍.軌道交通用永磁同步牽引電機(jī)電抗參數(shù)的有限元分析[J].電氣技術(shù),2013(3):1-4.Han Xueyan,Chen Quanwen,Chen Ping.The finite element analysis of permanent magnet synchronous traction motor reactance parameters[J].Electrical Engineering,2013(3):1-4.
[3]安忠良,李國麗,周挺.內(nèi)置式永磁發(fā)電機(jī)隔磁磁橋形狀對齒槽轉(zhuǎn)矩的影響[J].電氣技術(shù),2014(4):1-4,19.An Zhongliang,Li Guoli,Zhou Ting.Cogging torque improvement for interior permanent magnet generator by changing flux-barrier shape[J].Electrical Engineering,2014(4):1-4,19.
[4]Bianchi N,Bolognani S.Design techniques for reducing the cogging torque in surface-mounted PM motors[J].IEEE Transactions on Industry Applications,2002,38(5):1259-1265.
[5]Wang K,Zhu Z Q,Ombach G.Torque enhancement of surface-mounted permanent magnet machine using third-order harmonic[J].IEEE Transactions on Magnetics,2014,50(3):104-113.
[6]Shah S Q A,Lipo T A,Kwon B I.Modeling of novel permanent magnet pole shape SPM motor for reducing torque pulsation[J].IEEE Transactions on Magnetics,2012,48(11):4626-4629.
[7]黃守道,劉婷,歐陽紅林,等.基于槽口偏移的永磁電機(jī)齒槽轉(zhuǎn)矩削弱方法[J].電工技術(shù)學(xué)報(bào),2013,28(3):99-106.Huang Shoudao,Liu Ting,Ouyang Honglin,et al.A Method for reducing cogging torque by slot-opening shift in permanent magnet motors[J].Transactions of China Electrotechnical Society,2013,28(3):99-106.
[8]夏加寬,于冰,黃偉.減小齒槽轉(zhuǎn)矩的永磁電機(jī)結(jié)構(gòu)優(yōu)化設(shè)計(jì)[J].電氣技術(shù),2009(12):23-25.Xia Jiakuan,Yu Bing,Huang Wei.Optimization of the structure to reduce the cogging torque in pm motors[J].Electrical Engineering,2009(12):23-25.
[9]Lateb R,Takorabet N,Meibody-Tabar F.Effect of magnet segmentation on the cogging torque in surface mounted permanent magnet motors[J].IEEE Transactions on Magnetics,2006,42(3):442-445.
[10]Ashabani M,Mohamed Y.Multiobjective shape optimization of segmented pole permanent magnet synchronous machines with improved torque characteristics[J].IEEE Transactions on Magnetics,2011,47(4):795-804.
[11]Chaithongsuk S,Takorabet N,Meibody-Tabar F.On the use of pulse width modulation method for the elimination of flux density harmonics in the air-gap of surface PM motors[J].IEEE Transactions on Magnetics,2009,45(3):1736-1739.
[12]Zhu Z Q,Wu L J,Xia Z P.An accurate subdomain model for magnetic field computation in slotted surface mounted permanent magnet machines[J].IEEE Transactions on Magnetics,2010,46(4):1100-1115.
[13]郭思源,周理兵,曲榮海,等.基于精確子域模型的游標(biāo)永磁電機(jī)解析磁場計(jì)算[J].中國電機(jī)工程學(xué)報(bào),2013,33(30):71-80.Guo Siyuan,Zhou Libing,QuRonghai,Ling Zaixun.Analytical magnetic field calculation of vernier permanent magnet machines based on accurate subdomain model[J].Proceedings of the CSEE,2013,33(30):71-80.
[14]李節(jié)寶,井立兵,周曉燕,等.表貼式永磁無刷電機(jī)直接解析計(jì)算方法[J].電工技術(shù)學(xué)報(bào),2012,27(11):83-88.Li Jiebao,Jing Libing,Zhou Xiaoyan,et al.Exact analytical method for surface-mounted permanent magnet brushless motors[J].Transactions of China Electrotechnical Society,2012,27(11):83-88.
[15]郭思源,周理兵,齊歌.雙三相永磁同步電機(jī)電磁性能解析計(jì)算[J].電工技術(shù)學(xué)報(bào),2014,29(5):17-28.Guo Siyuan,Zhou Libing,Qi Ge.Analytical calculation of electromagnetic performance in dual three-phase permanent magnet brushless AC machines[J].Transactions of China Electrotechnical Society,2014,29(5):17-28.