一種雙饋風力發電系統低電壓穿越控制策略
2015-11-25 09:36:00黃科元黃守道
電工技術學報 2015年2期
關鍵詞:控制策略
張 陽 黃科元 黃守道
(湖南大學電氣與信息工程學院 長沙 410082)
0 引言
隨著風電裝機容量的迅速增加,并網風電機組的安全運行問題成為關注的焦點。風力發電系統的低電壓穿越(Low Voltage Ride Though,LVRT)能力成為衡量風電系統穩定性的重要指標[1-5]。目前,對電網電壓跌落故障下提高風電機組LVRT 能力的研究,已成為國內外風電技術研究的熱點問題。
雙饋感應發電機(Doubly-Fed Induction Generator,DFIG)是目前變速恒頻風力發電機組的主流機型。在雙饋風力發電系統的功率外環控制中,功率給定是一個關鍵參數,直接影響到最大風能追蹤控制的效果。當前雙饋風力發電機系統的功率給定方法是:首先測試出雙饋風力發電機的相關參數,得出轉速與功率的最佳關系曲線圖,再根據該曲線圖得到電機實時轉速對應的功率給定量,最終實現雙饋型風力發電系統功率閉環控制[2-8]。
這種確定雙饋風力發電機輸出有功功率給定值的方法,控制比較粗略。其原因是只有單一的功率閉環,而沒有轉速閉環,當轉速波動較大時,系統速度和功率實時匹配的動態性能欠佳,并且抗沖擊能力較差,系統穩定性較低[9,10]。
本文詳細分析了DFIG 機側變流器和網側變流器控制方法,在原有的雙饋風力發電機功率給定方法的基礎上增加了轉速閉環,提出了一種改進變換器控制策略和硬件保護相結合的低電壓穿越控制方法,保護轉子變換器,實現快速向電網提供無功支持、幫助電網電壓恢復。該控制策略改善了轉速與功率實時匹配的動態性能,提高了系統穩定性。DFIG 系統的總體框圖如圖1 所示。
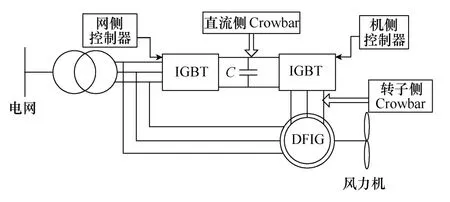
圖1 系統總體結構框圖Fig.1 Diagram of the whole system
1 改進變換器控制策略
1.1 機側變流器控制策略
傳統的功率給定方法為,首先測試出雙饋風力發電機的相關參數,做出轉速與功率的最佳關系曲線模塊,再將實測的電機機械角速度ωm作為輸入量送入該模塊中,經該模塊查表后得到與ωm相對應的雙饋型風力發電機輸出有功功率Pg*,作為該模塊的輸出,即實現了雙饋型風力發電機的功率給定。


圖2 改進的功率給定方法控制框圖Fig.2 Diagram of the improved given power control method
機側變流器采用定子磁鏈定向的矢量控制方案,控制結構采用功率外環、電流內環的雙閉環控制方式。由實測有功功率查表(最佳功率曲線表)得到最佳轉速的參考值,轉速參考值與反饋值構成轉速外環,其輸出作為電磁轉矩的給定值。無功功率的實測值與反饋值構成功率環,其輸出作為定子d 軸電流的給定值。內環為電流閉環,其作用是跟蹤轉速外環給出的電流有功分量的給定值以及電流無功分量(q 軸分量)的給定值。
電機的定子電壓空間矢量方程為

穩態時pψs=0,由此可得

將式(3)代入式(2)得到

式中,isd、isq為未知量。
將式(4)改寫成矩陣形式為

可求得

式中,usd、usq分別為定子電壓的d、q 軸分量;isd、isq分別為定子電流的d、q 軸分量;ird、irq分別為轉子電流的d、q 軸分量;Rs、Ls、Lm分別為電機定子電阻、定子電感、互感;ψsd、ψsq分別為定子磁鏈的d、q 軸分量;ω1為電網角頻率。
所以轉子電壓前饋項 urd'、urq' 為

式中,Rr、Lr分別為電機轉子電阻、電感;ω 為轉子電角頻率。
由于有功、無功兩個功率外環是對稱的,故兩個外環參數完全相同。同樣d、q 兩個電流內環是對稱的,故兩內環的PI 參數也完全相同,其設置見表1。

表1 機側變流器的PI 調節器參數Tab.1 The machine side converter PI regulator parameters
1.2 網側變流器控制策略
網側控制器采用電網電壓定向的矢量控制方案,控制結構采用雙閉環控制方式:外環為直流電壓閉環,其輸出作為電流有功分量(d 軸分量)的給定值。內環為電流閉環,其作用是跟蹤電壓外環給出的電流有功分量的給定值以及用戶設定的電流無功分量(q 軸分量)的給定值。網側控制器框圖如圖3 所示。
由于d、q 兩個電流內環是對稱的,故兩內環的PI 參數完全相同,其設置見表2。

圖3 網側控制器框圖Fig.3 Diagram of grid side controller

表2 網側變流器的PI 調節器參數Tab.2 The grid side converter PI regulator parameters
2 Crowbar 保護電路
在低電壓穿越時,轉子電流會增大至數倍[11,12],為了使流過轉子側的電流和直流母線電壓在安全的范圍之內,采取了轉子Crowbar 保護電路和直流側Crowbar 保護電路。這種保護電路控制簡單,響應速度快,可靠性高,成本較低。
2.1 轉子側Crowbar 保護電路
如圖4 所示,由三相二極管整流橋、IGBT 和泄放電阻構成的保護電路,其中三相整流橋與發電機轉子相連,當轉子三相電流超過1.5(pu)時,通過功率開關器件 IGBT 將泄放電阻連接到轉子回路中,用泄放電阻來消耗掉轉子的過電流,保護了轉子側變流器免遭過電流的損害。

圖4 轉子側Crowbar 保護電路Fig.4 Diagram of machine side crowbar
泄放電阻的取值是關鍵,阻值應足夠大以便迅速有效地削弱轉子側過電流,也要盡量小,避免直流側過電壓。當電網故障清除后,保護電路可以通過IGBT 的門極信號切除,機組恢復正常運行。
泄放電阻的阻值選取

根據上面公式計算出Crowbar 保護電路中的泄放電阻的取值范圍,然后通過Simulink 仿真實驗確定最優的泄放阻的阻值。
2.2 直流側Crowbar 保護電路
如圖5 所示,由IGBT 和泄放電阻構成的保護電路,通過泄放電阻來釋放直流母線電容上的過電壓能量,將直流電壓限制在兩側變流器功率開關器件允許的范圍之內。
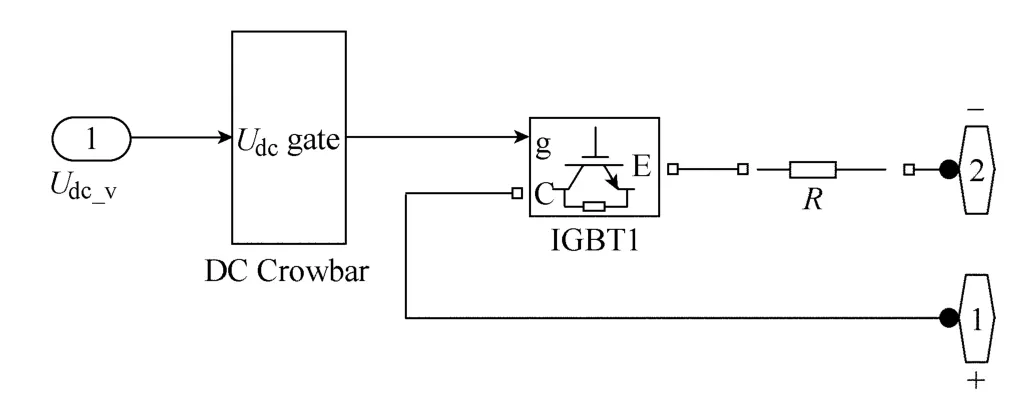
圖5 直流側Crowbar 保護電路Fig.5 Diagram of DC side crowbar
當Udc超過設定的閥值,完全投入卸荷電路,為避免保護頻繁動作,可采用帶滯環的直流側Crowbar 保護,動作閾值可以設定為下限為1 400V,上限為1 450V。即當直流母線電壓超過1 450V 時,直流Crowbar 投入,低于1 400V 時自動切除。
3 實驗結果與分析
本文所采用的雙饋電機參數見表3。圖6~圖8分別為電壓跌落器(VSG)取值為0.2、0.5、0.75時(即電壓跌落至 0.2(pu)、0.5(pu)、0.75(pu))主要參數波形。其中:①曲線為機側正序電壓波形的標幺值;②曲線為機側有功功率波形;③曲線為機側無功功率波形;④曲線為無功電流波形,電壓跌落期間,系統全發無功功率,有功功率置零。電壓恢復正常后,有功功率、無功功率、無功電流均能很快恢復到跌落前的狀態。并網電壓和動態無功電流見表4。

表3 電機參數Tab.3 Motor parameters
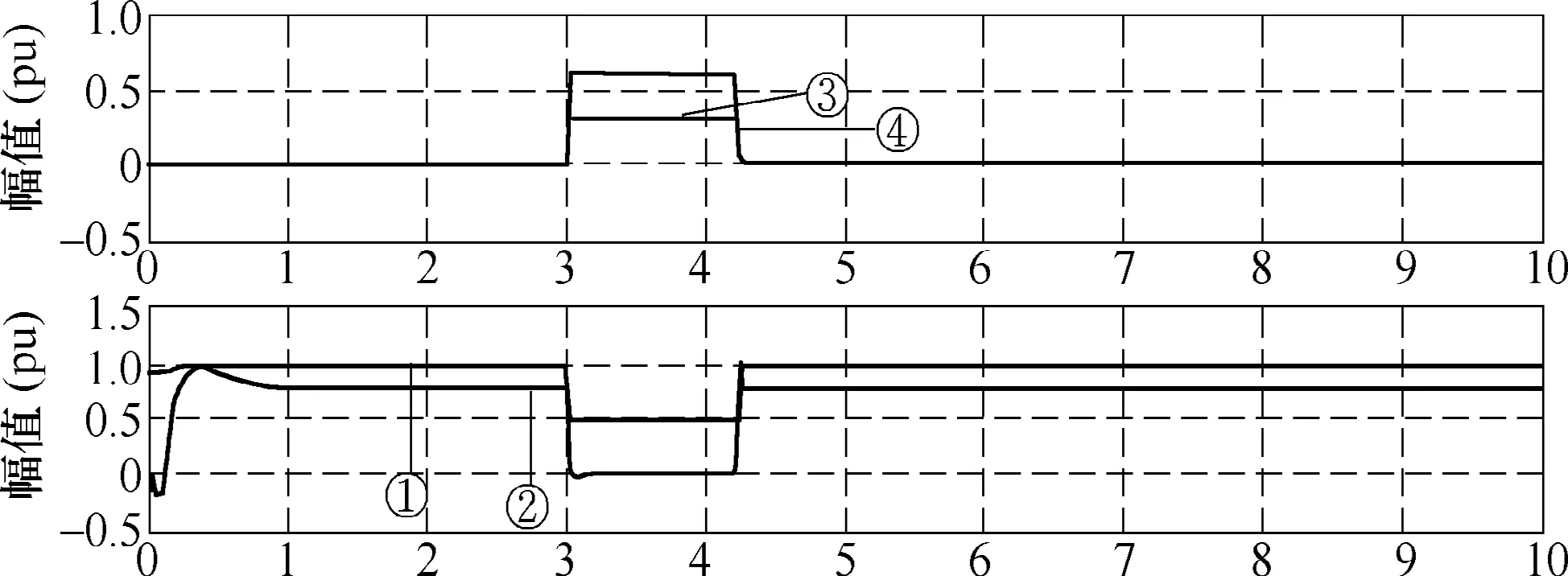
圖7 DFIG—電壓跌落至50%時主要參數波形Fig.7 DFIG—the waveforms of main parameters when voltage dip to 50 percents

圖8 DFIG—電壓跌落至75%時主要參數波形Fig.8 DFIG—the waveforms of main parameters when voltage dip to 75 percents
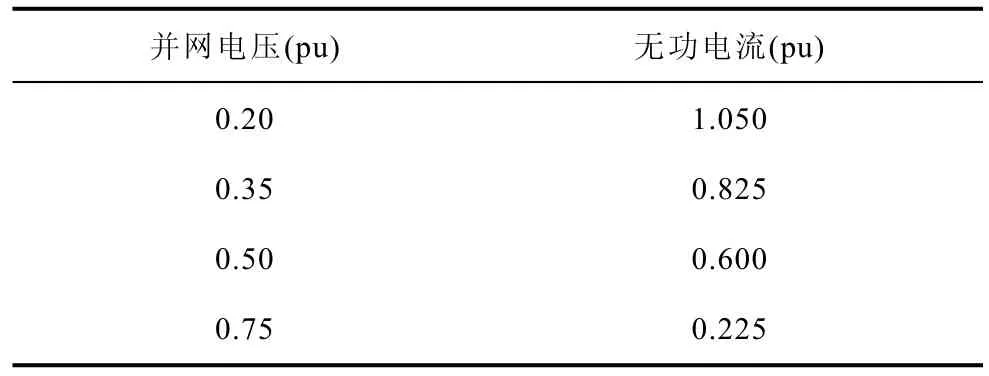
表4 并網點電壓與動態無功電流的關系Tab.4 The relationship of grid side voltage and dynamic reactive current
以三相電壓跌落50%深度的工況為例,得到圖9 所示的仿真與實測數據對比。電壓U、有功功率P、無功功率Q、無功電流Iq仿真數據與實測數據的差值在跌落前、跌落期間、跌落后均基本上保持在±1%。
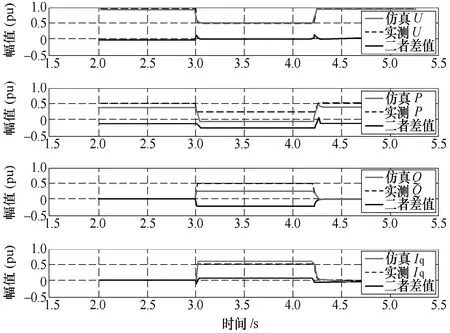
圖9 仿真與實測數據圖形對比Fig.9 The comparison of simulation and measured data
4 結論
本文主要分析了電網故障時機側變流器和網側變流器的控制策略,在原有的雙饋風力發電機功率給定方法的基礎上增加了轉速閉環,提出了一種改進變換器控制策略與Crowbar 硬件電路相結合的控制方式。實驗結果證明,該控制策略改善了轉速與功率實時匹配的動態性能,提高了系統穩定性。不僅能使電網故障時風電系統不脫網運行,同時實現了快速向電網供電,幫助電網恢復的功能。
[1]賀益康.并網雙饋異步風力發電機運行控制[M].北京:中國電力出版社,2011.
[2]賀益康,周鵬.變速恒頻雙饋異步風力發電系統低電壓穿越技術綜述[J].電工技術學報,2009,24(9):140-146.He Yikang,Zhou Peng.Overview of the low voltage ride-through technology for variable speed constant frequency doubly fed wind power generation systems[J].Transactions of China Electrotechnical Society,2009,24(9):140-146.
[3]Morren J,Sjoerd W H de Haan.Ride through of wind turbines with doubly-fed induction generator during a voltage dip[J].IEEE Transactions on Energy Conversion,2005,20(1):435-441.
[4]肖磊,黃守道,黃科元.不對稱電網故障下直驅式永磁風力發電系統直流母線電壓穩定控制[J].電工技術學報,2010,25(7):123-129.Xiao Lei,Huang Shoudao,Huang Keyuan.DC voltage of stability in directly-driven wind turbine with PM synchronous generator during the asymmetrical faults[J].Transactions of China Electrotechnical Society,2010,25(7):123-129.
[5]Morren J,Haan S W H.Ride through of wind turbines with doubly-fed induction generator during a voltage dip[J].IEEE Transactions on Energy Conversion,2005,20(2):435-441.
[6]Li Yu,Guan Hongliang.LVRT capability of wind turbine generator and its application to regional power grid[C]//Proceedings of the 5th World Wind Energy Conference,Delhi,India,2006.
[7]黃守道,肖磊,黃科元.不對稱電網故障下直驅型永磁風力發電系統網側變流器的運行與控制[J].電工技術學報,2011,26(2):173-180.Huang Shoudao,Xiao Lei,Huang Keyuan.Operation and control on grid-side converter of directly-driven wind turbine with pm synchronous generator during the asymmetrical faults[J].Transactions of China Electrotechnical Society,2011,26(2):173-180.
[8]Chong H N,Li R.Unbalanced-grid-fault ride-through control for a wind turbine inverter[J].IEEE Transactions on Industry Applications,2008,44(3):845-856.
[9]Muyeen S M,Takahashi R,Murata T,et al.Low voltage ride through capability enhancement of wind turbine generator system during network disturbance[J].IET Renewable Power Generation,2009,3(1):65-74.
[10]Yin B,Oruganti R,Panda S K,et al,An outputpower-control strategy for a three-phase PWM rectifier under unbalanced supply conditions[J].IEEE Transactions on Industrial Electronics,2008,55(5):2140-2151.
[11]Li Z,Li Y,Wang P,et al.Control of three-phase boost-type PWM rectifier in stationary frame under unbalanced input voltage[J].IEEE Transactions on Power Electronics,2010,25(10):2521-2530.
[12]Zmood D N,Holmes D G.Stationary frame current regulation of PWM inverters with zero steady-stateerror[J].IEEE Transactions on Power Electronics,2003,18(3):814-822.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36