非線性動態逆空中加油自主對接控制
2015-12-25 09:21:42王健董新民王海濤竇和鋒彭軻
飛行力學 2015年1期
王健,董新民,王海濤,竇和鋒,彭軻
(空軍工程大學航空航天工程學院,陜西西安710038)
0 引言
自主空中加油(Automatic Aerial Refueling,AAR)技術能夠有效延長 UAV的航程與任務時間[1],是實現長航時和擴大作戰半徑的手段之一,其中實現自主對接控制是完成UAV自主空中加油的關鍵。
AAR自主對接控制主要包括軌跡跟蹤、對接控制和位置保持三個階段。盡管軟管式加油與硬管式加油在對接控制階段的要求有所不同,但受油機的基本控制方式和目標是一致的。從本質上看,自主對接各階段可以看作擾動影響下的相對位置的跟蹤和保持。王宏倫等[2]考慮加油機尾渦和錐套擺動的影響,設計了受油機參考軌跡發生器和軌跡跟蹤控制器;文獻[3]針對空中加油存在的加油機尾流干擾,利用等效氣動效應法建立了UAV動力學模型,基于加權二次型性能指標設計了自主對接最優控制律。顯然上述文獻都是針對線性小擾動模型設計控制律,不能準確反映自主空中加油過程的復雜動力學特性。因此,采用非線性方法設計控制律成為一種趨勢,而非線性動態逆利用期望的動態去彌補系統原有的不完整、不期望動態,實現非線性對消,在飛機控制律研究中得到了應用。文獻[4]采用層疊結構的動態逆控制器,設計了飛機四組狀態變量的控制律;文獻[5]采用常規動態逆和模型參考動態逆分別設計了控制律,對比分析其特點和差異。但在常規非線性動態逆設計中,大多數學者采用氣流角進行控制,該方法存在控制量幅值和速率過大的問題,忽視了飛機協調轉彎及爬升速率的限制,另外氣流角在實際應用中不能像姿態角那樣更精確、更穩定地被飛機傳感器測量。
本文針對上述問題,建立了尾流影響下的UAV六自由度模型。利用動態逆非線性對消的特點,設計了空中加油自主對接控制律。根據時標分離原理,將飛機控制律劃分為航跡、姿態、角速率和自動油門等回路進行設計。采用比例反饋方法,設計了航跡跟蹤控制律。引入爬升速率和協調轉彎約束,設計了姿態指令生成器,并設計了一種受油機內環角速率及自動油門的非線性動態逆控制律。最后通過仿真,驗證了控制律的有效性。
1 尾流影響下的UAV建模
建立尾流影響下的UAV六自由度模型,首先需要常規飛機的六自由度方程[6],然后將尾流的影響引入到受油機外力和外力矩方程中去。考慮加油機尾流的影響,受油機所受氣動力和外力矩的表達式為[7]:
式中:?C=C0+ΔC,其中 C0為標稱氣動系數,ΔC為加油機尾流影響的誘導系數,其他符號的含義參見文獻[6]。
2 非線性動態逆自主對接控制律設計
UAV自主空中加油可看作擾動影響下的位置或軌跡跟蹤問題,因而控制律的任務是最終實現對受油點的精確跟蹤。考慮UAV動力學特性,為簡化控制律的設計,可以按照奇異值原理,將其分解為航跡、姿態、角速率和自動油門回路,分別進行設計,主要實現姿態和速度控制的功能。總體控制律設計結構如圖1所示。航跡、姿態和角速率回路將加油機、受油機的狀態量最終轉化成受油機升降舵、副翼和方向舵偏角指令,實現對受油機姿態的控制;自動油門回路通過動態逆原理設計,將前向速度指令最終轉化為油門桿指令,通過油門實現對速度的控制。
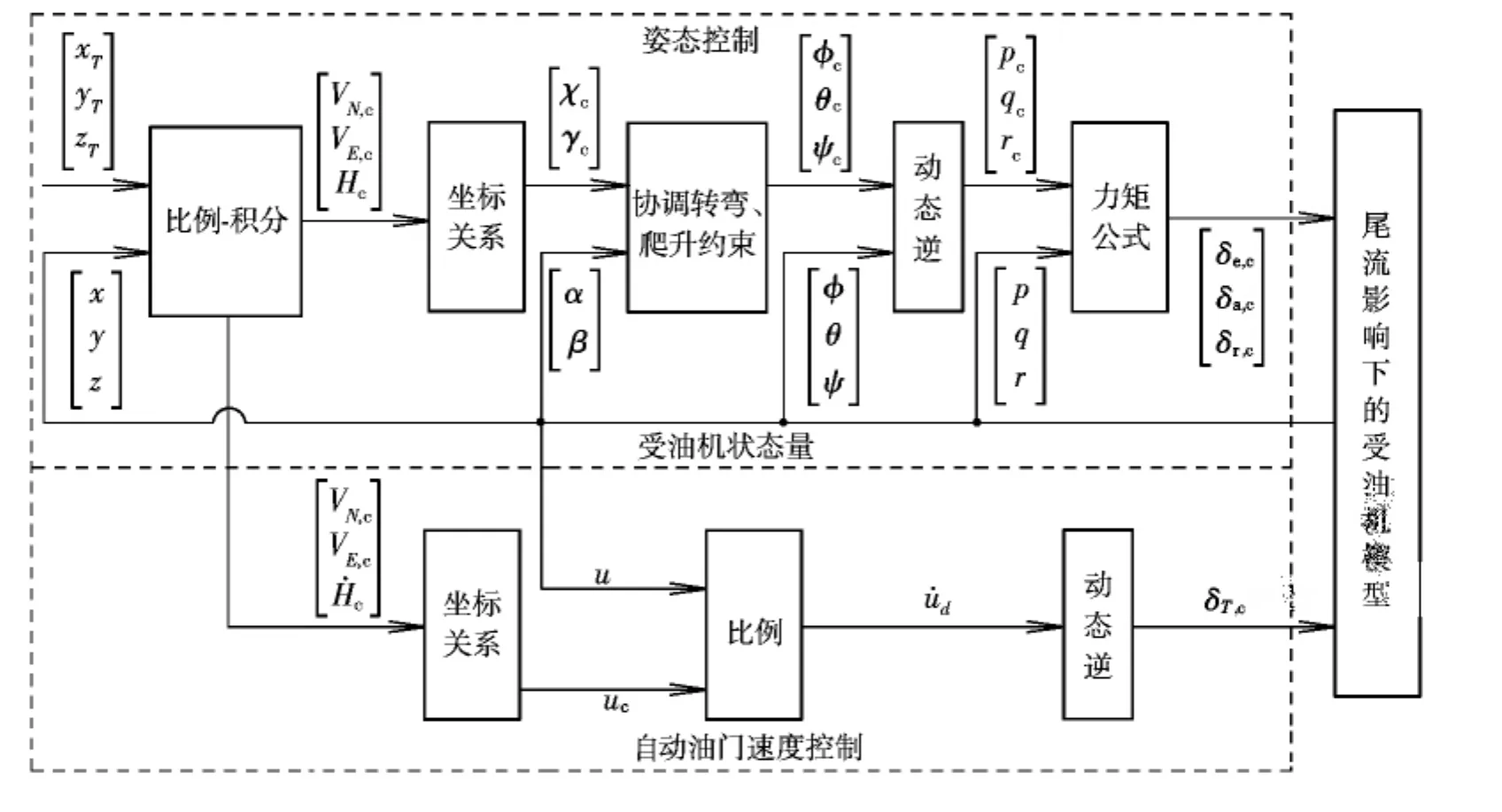
圖1 控制律結構圖Fig.1 Structure of the control law
2.1 航跡回路分析設計
航跡回路控制的目的是將期望的位置(xT,yT,zT)轉換為飛機的航跡回路指令(χc,γc)和自動油門通道的前向速度指令uc。飛機航跡回路[V,χ,γ]T的微分方程無法表示成仿射非線性的形式,導致在設計航跡回路時無法應用動態逆,從而需要重新設計,采用常規的比例反饋方法對航跡回路控制律設計如下。采用比例反饋,并引入速度阻尼,將期望航跡轉換為地平坐標系下的速度指令:
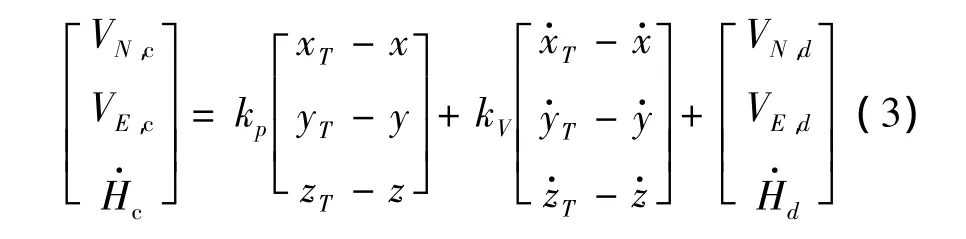
根據機體系與地平系的坐標關系,自動油門通道的機體前向速度指令可表示:

根據地平系與航跡系的坐標關系,航跡偏角指令可表示為:

2.2 姿態回路分析設計
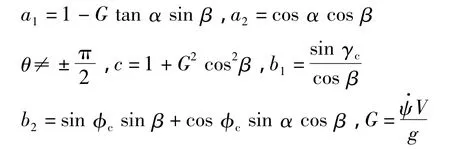
姿態回路控制的目的是將航跡角指令轉換為姿態角指令。在設計中采用姿態角[φ,θ,ψ]T來代替氣流角[α,β,μ]T,考慮飛機協調轉彎限制和爬升速率約束來確定俯仰指令θc和滾轉指令。姿態角指令公式如下:
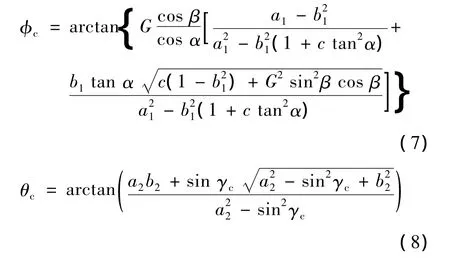
其中:
由機體系和航跡系的坐標關系,偏航角指令可表示為:

2.3 角速率回路分析設計
角速率回路控制的目的是將姿態角指令轉換為姿態角速率指令,并最終求解飛機舵面偏轉指令。
引入姿態角反饋,姿態角指令增量的導數通過如下的一階濾波器獲得:
用動態逆方法對飛機運動方程進行推導,并將式(10)代入可知,角速率指令為:
則:
其中:

由飛機運動方程可知,期望的總力矩為:
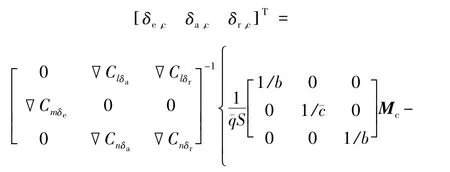
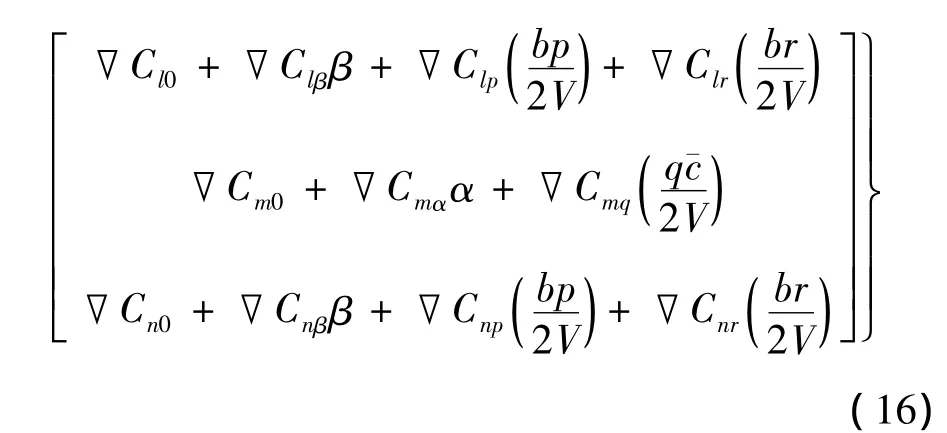
將飛機外力矩方程式(15)代入式(2),則飛機舵面偏轉角指令可表示為:
2.4 自動油門分析設計
自動油門回路控制的目的是通過動態逆的方法,將機體前向速度指令轉換為自動油門的控制指令,從而實現對飛機速度的控制。采用比例反饋,將機體前向速度指令誤差轉換為飛機期望的前向速度變化率:

式中:ku為設定的油門比例控制系數。
將式(17)代入飛機受力方程,則機體軸x方向的合外力Fx可表示為:

由外力平衡可知,期望的推力指令可表示為:

3 仿真結果及分析
為驗證本文UAV自主對接控制律的有效性,以軟管錐套式加油為例進行仿真。仿真條件如下:加油機翼展39.88 m,軟管錐套式空中加油系統距右翼尖2.85 m,其初始高度為7 200 m,在x,y軸上位置分別為300 m,150 m,始終在x軸方向以VT=180 m/s保持定直平飛狀態;UAV初始高度為7 050 m,在x軸方向以VR=180 m/s定直平飛,油門配平控制量為δT=55%,升降舵配平偏轉角度δe=13°,方向舵和副翼配平偏轉角均為零。采用Burnham模型[8],利用等效氣動效應法,將非均勻的尾流對UAV的氣動影響等效為均勻風場作用在其質心上,從而計算出誘導力和力矩[9-10]。
在UAV空中加油自主對接過程中,利用等效氣動效應法計算等效尾流速度與角速度變化,結果如圖2所示。
遠距階段,受油機追蹤加油機的位置速度;近距階段(即相對距離小于50 m時),以錐套作為追蹤的對象。尾流作用下錐套在加油機系的運動規律[10]如圖 3 所示。
受油機與加油錐套的對接軌跡如圖4所示,受油機與錐套的相對位置誤差如圖5所示。
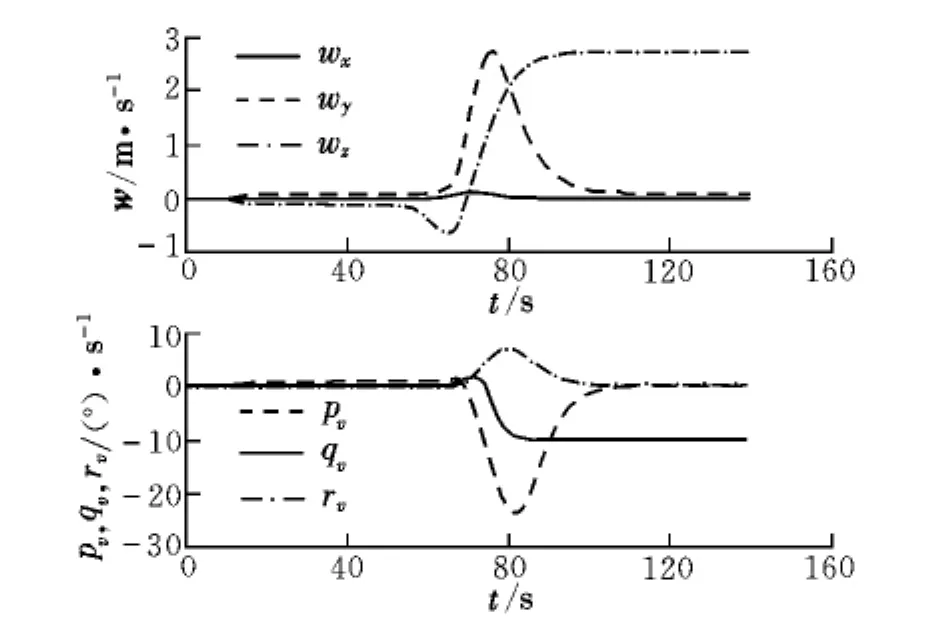
圖2 等效尾流速度與角速度Fig.2 Equivalent wake speed and angular speed
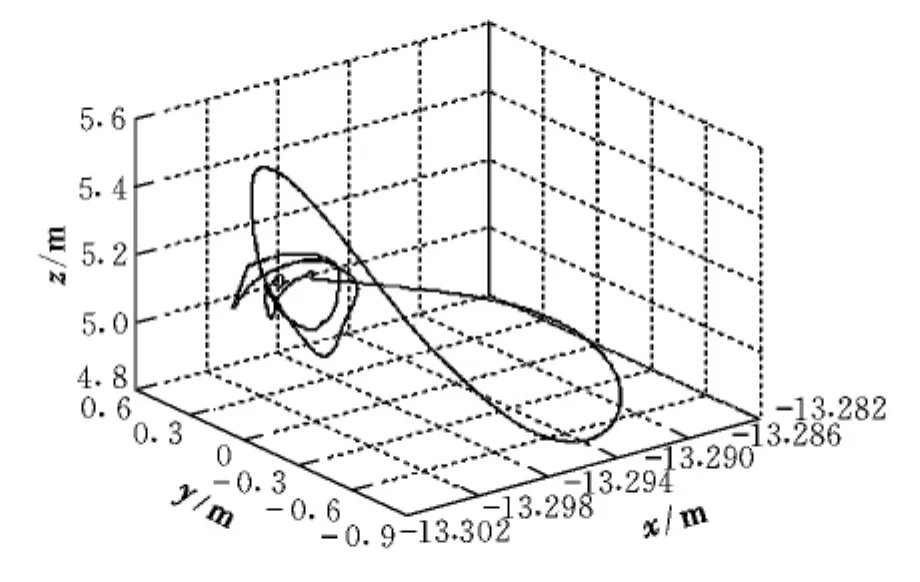
圖3 錐套在加油機系的相對位置Fig.3 Position of the drogue in tanker frame
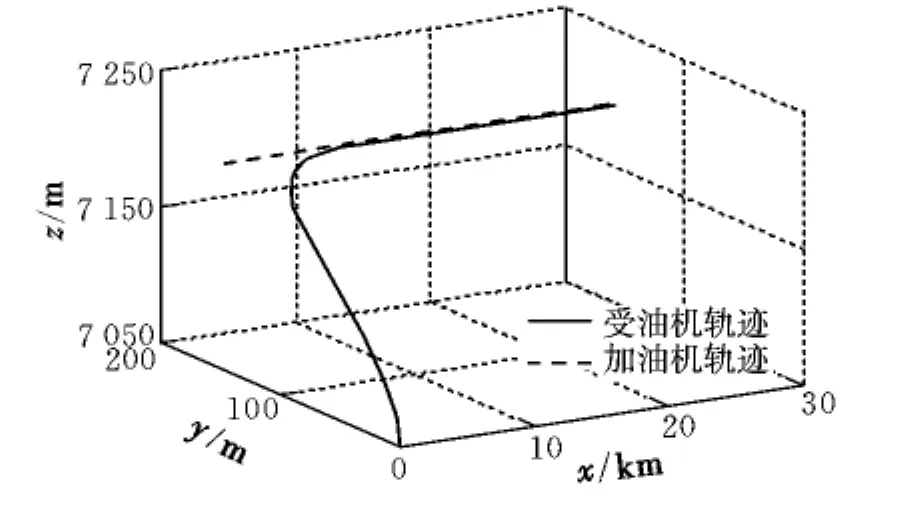
圖4 加油機與受油機的航跡Fig.4 Flight path of the tanker and receiver
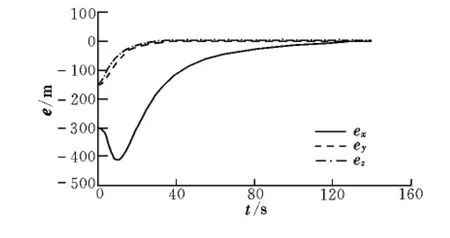
圖5 受油機與錐套的相對位置誤差Fig.5 Position error between the drogue and receiver
仿真過程可近似劃分為三個階段。第一階段,UAV快速減小與受油機的側向和縱向的位置偏差,迅速實現了加油對準;第二階段,UAV水平加速飛行,逐漸減小與錐套前向位置偏差,側向和縱向始終與參考軌跡保持一致;第三階段(即t=100~140 s期間),設計的對接控制律可以使UAV克服加油錐套的擺動影響,實現準確的位置跟蹤,并于t=140 s時實現對接。對接過程中受油機部分狀態量如圖6所示,受油機控制量變化如圖7所示。
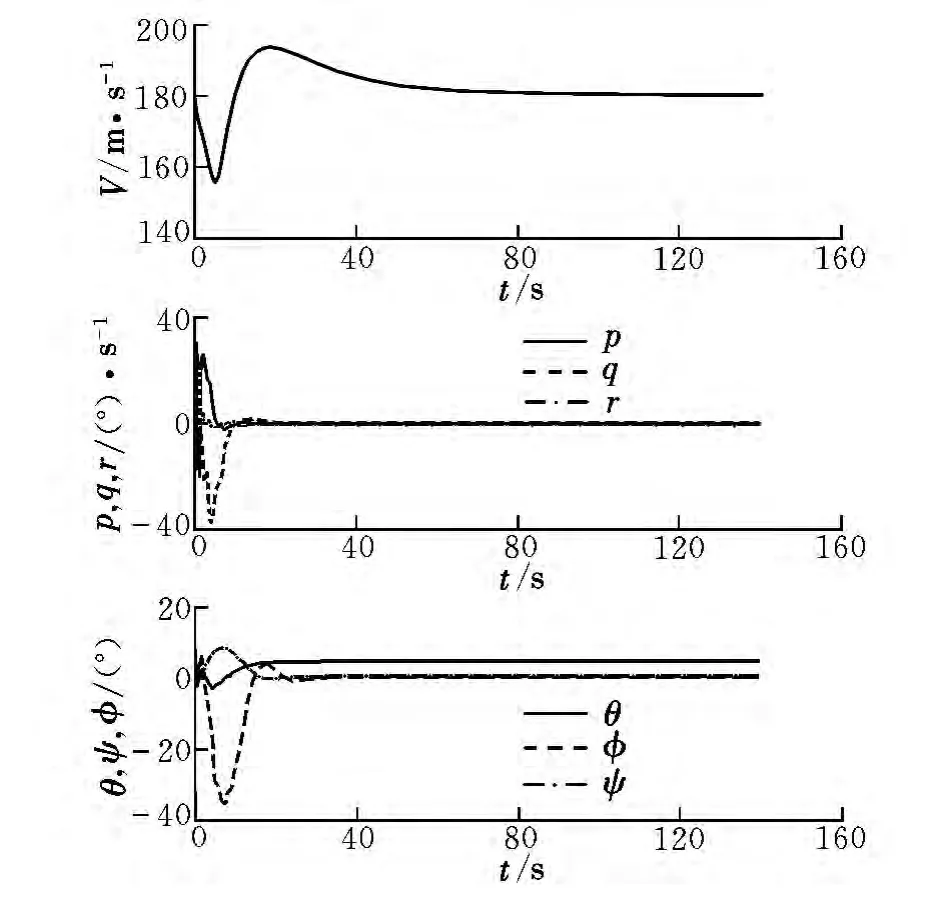
圖6 受油機部分狀態量Fig.6 Part of the receiver state’s variables
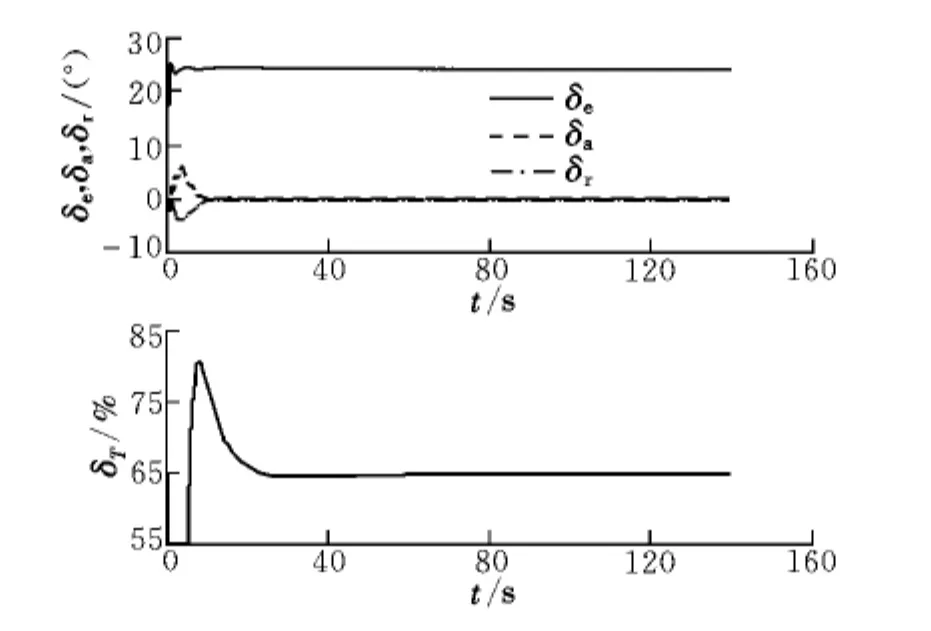
圖7 受油機控制量Fig.7 Control variable of the receiver
由仿真結果可知,基于動態逆的自主對接控制律有效地克服了加油機尾流、大氣擾動等影響,使飛機狀態變化更加平穩,收斂更加迅速。尤其在t=100 s后的對接過程中,UAV能夠更加有效地克服加油錐套飄擺和對撞力的影響,體現了較強的穩定性和魯棒性。
4 結束語
本文在UAV自主空中加油對接過程中采用非線性動態逆設計控制律,減少了線性小擾動模型的不確定帶來的控制不確定因素,克服了加油機尾流、大氣擾動等影響,實現了UAV自主空中加油對接控制;另外,在常規動態逆控制律的基礎上進行了改進,采用姿態角代替氣流角進行控制,考慮協調轉彎和爬升速率約束,使控制更加穩定。最后通過仿真驗證了該控制律的有效性。但由于氣動參數在實際飛行中是不可測的,因此在應用中還需要使用自適應逼近機構逼近實際的氣動參數。
[1] 董新民,徐躍鑒,陳博.自動空中加油技術研究進展與關鍵問題[J].空軍工程大學學報:自然科學版,2008,9(6):1-5
[2] 王宏倫,杜熠,蓋文東.無人機自動空中加油精確對接控制[J].北京航空航天大學學報,2011,37(7):822-826.
[3] 竇和鋒,董新民,薛建平,等.無人作戰飛機空中加油建模與近距機動控制律設計[J].飛行力學,2013,31(4):326-330.
[4] 鄧婷婷,楊朝旭,孫紹山,等.非線性動態逆方法在飛行控制律設計中的應用[J].計算機測量與控制,2013,21(5):1236-1238.
[5] 龍晉偉,潘文俊,王立新.戰斗機動態逆控制律對比研究[J].飛行力學,2013,31(4):297-300.
[6] Steven B L,Lewis F L.Aircraft control and simulation[M].Wiley:Interscience,1992:81,131-132.
[7] 肖業倫,金長江.大氣擾動中的飛行原理[M].北京:國防工業出版社,1993:82-90.
[8] Waishek J,Dogan A,Blake W.Derivation of the dynamics equations of receiver aircraft in aerial refueling[J].Journal of Guidance,Control,and Dynamics,2009,32(2):585-597.
[9] 陳博,董新民,徐躍鑒,等.加油機尾流場建模與仿真分析[J].飛行力學,2007,25(4):73-76.
[10]王海濤,董新民,竇和鋒,等.軟管錐套式空中加油系統建模與特性分析.[J].北京航空航天大學學報,2014,40(1):92-98.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電信科學(2016年10期)2016-11-23 05:11:56
西安航空學院學報(2014年5期)2014-07-13 01:27:52
