多發飛機著陸進場最小操縱速度人機閉環仿真
2015-12-25 09:21:50王崢華李超
飛行力學 2015年1期
王崢華,李超
(中航通飛研究院有限公司第一研究室,廣東珠海519040)
0 引言
運輸類飛機至少要安裝兩臺發動機,當推力不平衡時,能保持對飛機的平穩操縱,維持飛行航向[1]。在最小操縱速度VMCL的驗證試飛過程中,不同高度、重量、重心、速度等狀態下的試驗工作量和成本均很大。如果在適航驗證試飛之前,能夠盡可能準確地給出VMCL值以及操縱過程中各運動參數的動態變化趨勢,不僅能夠在制定試飛大綱時優化試飛矩陣,提高經濟性,而且能夠為飛行員的試飛操縱程序提供參考,保證飛行安全。在以往的工程計算中,VMCL主要根據飛機靜平衡方程進行計算[2-3],與實際值存在較大的誤差,且沒有考慮對VMCL值影響較大的發動機失效后拉力衰減、駕駛員操縱延遲等因素,也不能反映糾偏過程中飛機各狀態參數的變化過程。
針對上述問題,本文建立了符合VMCL驗證試飛任務的人機閉環數學仿真模型,通過進行準確的飛行仿真,得到較精確的VMCL值。
1 適航要求
CCAR-25-R4[1]要求:飛機為進行復飛增加到復飛功率后,在速度VMCL時臨界發動機突然停車,飛行員能夠用正常的駕駛技巧和體力恢復對飛機的操縱,并維持坡度不大于5°的直線飛行;在VMCL速度時,飛機必須有足夠的橫向操縱能力,使飛機能夠在5 s內從穩定的直線飛行狀態向不工作發動機一側相反方向滾轉20°。
VMCL的試飛演示形態和驗證方法[4-5]為:正常著陸形態、襟翼和起落架放下、最不利重量后重心,按照全發工作進場狀態配平并在演示過程中不重新改變配平位置,加大全部發動機功率到復飛狀態,在滿足上述適航條款要求的最小速度時,切斷臨界發動機油路使臨界發動機停車并能夠恢復對飛機的操縱。飛機由于受到不對稱推力作用而偏航的過程中,需要用方向舵克服此不利偏航力矩糾正航向,使用副翼維持一定的坡度來保持橫向受力平衡,并有利于減小腳蹬力[5]。
在VMCL符合性驗證過程中,需檢查飛機的運動是否滿足以下條件:
(1)在糾偏過程中航跡偏角相對于關鍵發動機停車之前的變化量最大不超過 20°,即 Δχ≤20°[6];
(2)飛機最終可維持坡度不大于5°的直線飛行;
(3)飛機無危險的飛行特性,或要求特殊的駕駛技巧、機敏或體力;
(4)臨界發動機停車后的滾轉機動能力,即Δt≤5 s,Δφ =20°。
2 飛機本體數學模型
在機體參考系內,剛性機體的轉動動力學方程為:
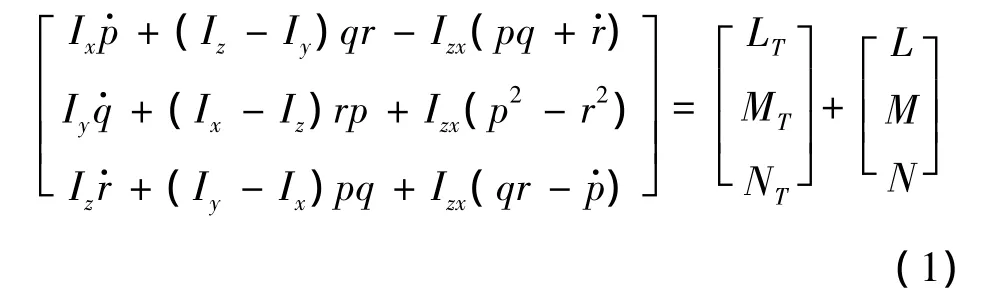
式中:p,q,r為體軸系姿態角速度;Ix,Iy,Iz為轉動慣量;Izx為慣性積;[LT,MT,NT]T為發動機拉力在機體軸上的投影產生的三軸力矩;L,M,N為氣動力矩在體軸系上的分量[7]。
本文利用某型多發渦槳水陸兩棲飛機風洞試驗測得的在不同迎角、側滑角以及操縱面偏度(δe,δa,δr)、拉力系數Cp、襟翼偏度δf等試驗狀態下的氣動力和力矩系數,使用基于最大似然法的系統辨識方法[8],建立了氣動力的多變量高階非線性數學模型。
發動機的拉力T一般與飛行速度、高度、油門位置等有關。根據發動機的安裝位置,可以給出每臺發動機在機體軸上的拉力分量以及拉力產生的力矩模型。發動機功率變化(或油門切換)后拉力Ti衰減或增加的過程描述為:

式中:τp為發動機時間常數;Ti0為發動機原工作狀態的拉力值。
3 駕駛員模型
根據文獻[1]對VMCL驗證試飛形態和方法的要求,確定駕駛員操縱行為。飛機在著陸構型下全部發動機工作于復飛功率,臨界發動機失效后按照式(3)的規律衰減,駕駛員經過時間間隔tpd后覺察到臨界發動機停車,并立即蹬舵來糾正飛機的航向改變,同時操縱副翼使飛機能夠保持傾斜角不超過5°,而且副翼偏度的余量應該使飛機仍然具有一定的橫向機動能力,能夠完成25.149(h)條要求演示的在5 s內從不工作發動機一側向相反方向滾轉20°。此外,駕駛員還需控制飛機航跡角,使之滿足臨界發動機停車時復飛爬升梯度不小于2.7%的要求[1]。
VMCL的人機閉環仿真結構框圖如圖1所示。
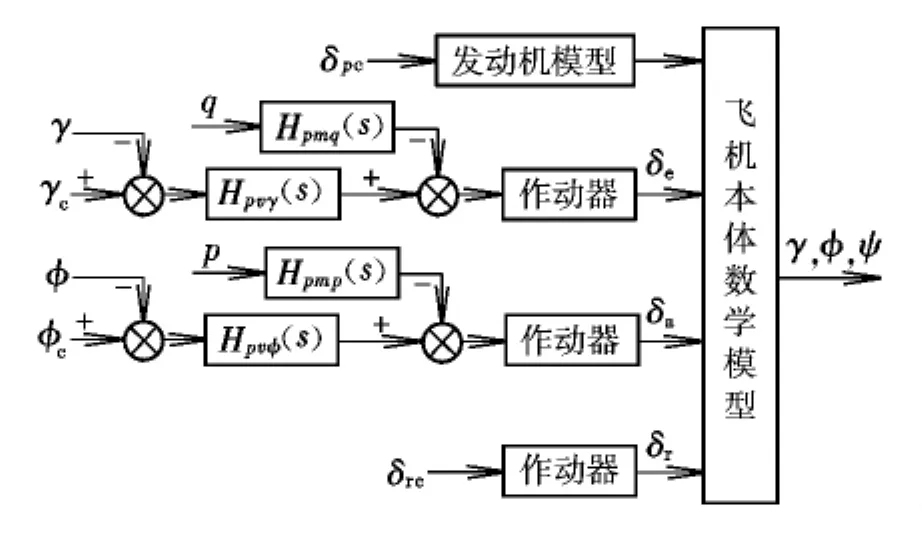
圖1 人機閉環仿真結構框圖Fig.1 Simulation structural of aircraft-pilot closed loop
圖中:δpc為根據演示內容對應的發動機油門位置或功率水平,發動機模型見式(2);δrc為方向舵操縱規律;γc和φc分別為指令航跡角和滾轉角;下標c代表演示條款期望的指令,各舵機的動態特性用一階慣性環節來描述,并考慮舵面行程和舵面偏轉速率的限制。
發動機油門通道表示為:
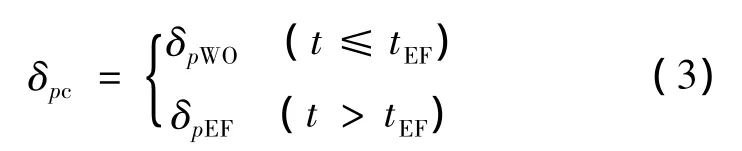
式中:δpWO為全部發動機油門處于復飛功率狀態;δpEF為臨界發動機停車、其余發動機仍處于復飛功率位置的油門狀態;tEF為臨界發動機停車的時刻。
方向舵操縱通道模型為:

式中:δrtrim為原飛行平衡狀態的操縱量;Hpψ(s)為控制航向角偏離的駕駛員模型;tpd為臨界發動機停車后的反應延遲時間。
本文采用一種文獻[9-10]改進的駕駛員模型,該模型除對駕駛員依據視覺信息 Hpvγ(s),Hpvφ(s),Hpψ(s)等調節其自身的操縱策略和行為進行建模外,還引入人體生理器官對運動感覺Hpm(如轉動加速度、過載等)的反應,其結構如圖2所示。
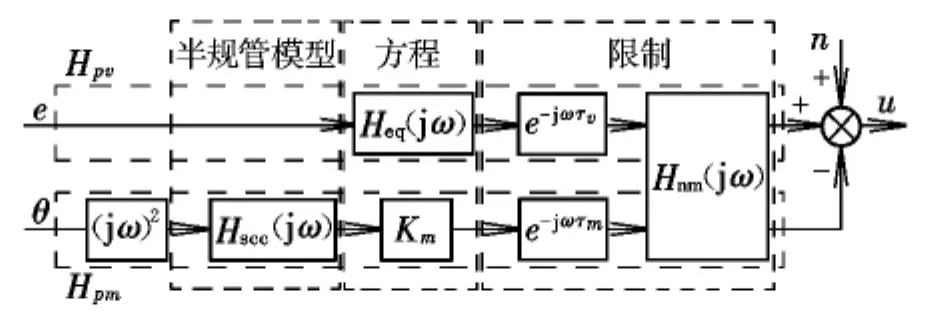
圖2 駕駛員模型結構框圖Fig.2 Structural diagram of pilot model
圖中:Hscc為人體內耳前庭器官系統用于感知角運動變化的半規管模型;e-jωτv和 e-jωτm為駕駛員對信息反應的神經傳導時延;Hnm(jω)為人體的肌肉作動延遲;Heq與McRuer模型類似,其數學描述如下:

式中:KV為駕駛員增益,取值范圍為1~100;τL為駕駛員對操縱過程的預測而需要的超前補償時間常數,反映了駕駛員精神負荷的大小,約為0~1.0 s;TI為中樞信息的傳遞和加工過程的時滯,反映了駕駛員體力負荷的大小,約為0~1.0 s。
綜上所述,根據所研究飛機的特點,分別調整設定好俯仰、滾轉、偏航三軸通道中駕駛員模型各參數的大致取值;然后根據VMCL驗證試飛任務的特點,再對偏航控制通道的駕駛員模型參數進行適當的調整,可建立起能夠真實模擬VMCL驗證試飛過程及駕駛員操縱策略的人機閉環仿真數學模型。
4 V MCL計算步驟
圖3為本文VMCL迭代計算的整個步驟和流程。由于所研飛機采用了無回力助力操縱系統,通過設計合理的人感裝置可以使桿力滿足適航條款的要求,因此本文不考慮操縱力的限制,圖3中也未列出操縱力限制的判斷條件。
迭代計算過程中,首先根據條款要求設定計算狀態(如重量、重心等),并給定臨界發動機停車時合適的測試速度Vtest初值,一般可先選稍大于Vref的速度[4]。然后,在初始狀態配平,根據驗證試飛要求使用人機閉環仿真模型進行動態模擬仿真。由仿真結果觀察臨界發動機突然停車后,在糾偏過程中航向改變是否超過了20°、傾斜角能否保持在5°范圍內,以及飛機是否出現了危險的飛行特性或要求特殊的駕駛技巧。
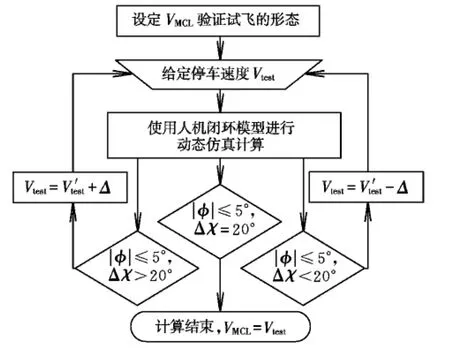
圖3 V MCL迭代計算流程圖Fig.3 Flow chart of the V MCL iterative calculation
如果改變計算狀態初值,則可得到不同重量、重心等條件下的著陸進場最小操縱速度。
5 V MCL仿真算例
利用本文方法計算了某型四發螺旋槳飛機在最大著陸重量、后重心時的VMCL。為了得到最小的VMCL,并且有適量的桿舵余量保證滾轉機動能力,選擇了向工作發動機一側傾斜5°的驗證試飛方法[4-5]。從初始狀態仿真開始后,假定在tEF=1 s時刻臨界發動機停車(該型飛機的臨界發動機為機體右外側的發動機),且已知發動機停車后功率衰減的時間常數Tp=2 s,駕駛員在臨界發動機停車后再經過 tpd=1 s[11-12]才開始糾偏。VMCL的仿真計算結果如圖4和圖5所示。
圖4給出了在不同速度下臨界發動機停車后航向改變的時間歷程曲線。可以看出,當速度較大時,最大航向改變量Δχ小于20°,并且方向舵能夠產生足夠的偏航力矩抑制由于發動機不對稱扭矩引起的偏航,Δχ逐漸收斂;隨著速度的減小,舵面效率逐漸降低,航向偏移量也逐漸增大,呈現逐漸發散的趨勢。當Δχ剛好等于20°且航向改變量增大的趨勢得到抑制時,此時的速度V=133.2 km/h(校正空速),即著陸進場最小操縱速度VMCL。
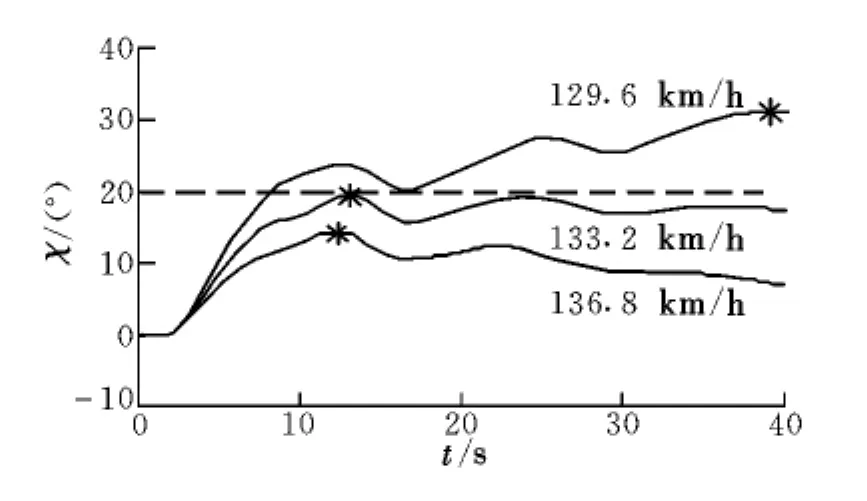
圖4 糾偏過程中航向改變時間歷程Fig.4 Iteration process of determining the V MCL
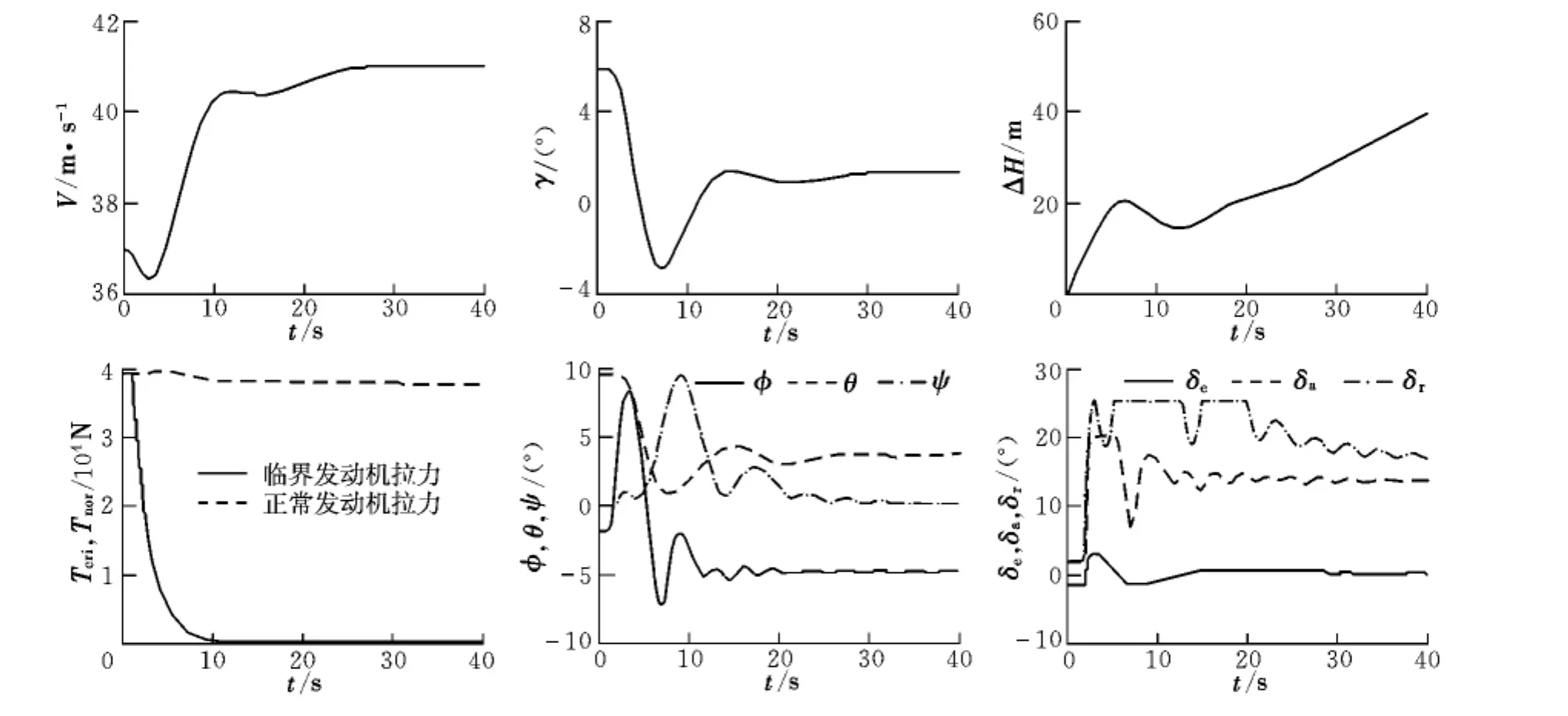
圖5 V MCL人機閉環數學仿真結果Fig.5 Results of the V MCL evaluation
由圖5可以看出,仿真開始1 s后在VMCL時臨界發動機突然停車,在發動機不對稱拉力的作用下,初始階段產生了正的偏航角ψ(負側滑),由于Clβ<0,正的滾轉力矩使飛機初始產生了正的傾斜角φ。2 s之后,駕駛員開始抑制運動的偏離,副翼和方向舵在初始階段均達到了其最大正偏度,約20 s后逐漸達到了穩定的復飛爬升狀態,速度最終基本保持穩定;航跡角為 1.55°,滿足了爬升梯度不小于2.7%的要求;傾斜角保持在-5°,副翼偏度穩定在13.5°(副翼留有32.4%的余量)。
值得注意的是,在臨界發動機突然停車后,速度有2~3 s的輕微降低,這是由于著陸構型復飛爬升的過程中,有一臺發動機突然失效時,隨著初始側滑角的增大,阻力增加很快,造成了剩余功率不足,在較短的時間內速度會有一定的降低。這種小幅的速度損失現象在某四發先進軍用運輸機FMTA[2]以及E-2C+[11-12]等飛機最小操縱速度的試飛數據中均有出現。
依據文獻[5]的演示程序,飛機在臨界發動機停車保持穩定后,本文利用副翼從機翼水平位置向不工作發動機相反方向滾轉20°(見圖6)。可以看出,飛機能夠按照適航條款的要求在小于5 s的時間內完成滾轉機動。
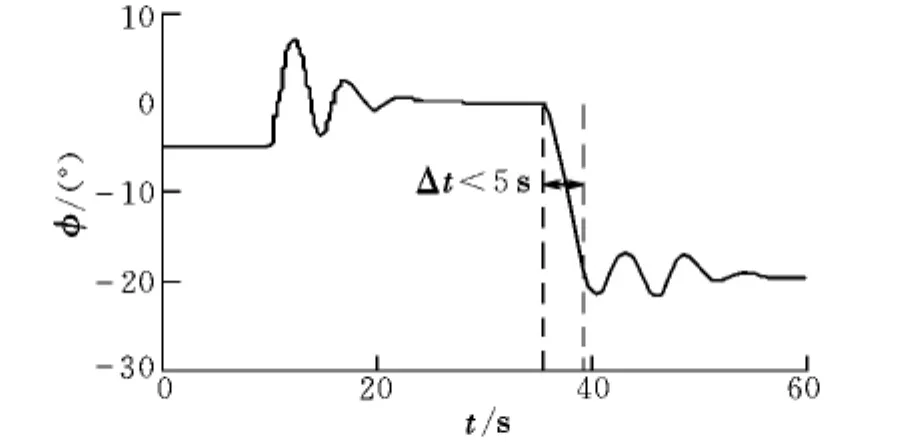
圖6 V MCL的滾轉機動能力演示Fig.6 Demonstration of the roll maneuver ability at V MCL
為了驗證本文人機閉環仿真結果的正確性,給出了與算例飛機在相同條件下應用靜態方法計算VMCL的對比示例:本文人機閉環仿真方法為133.2 km/h,靜態方法為157.7 km/h。可以看出,兩種方法計算得到的結果之間有一定的差別,這是因為本文人機閉環仿真方法考慮了靜態計算方法所不能涉及的駕駛員反應延遲、發動機衰減特性、舵機動態特性,以及臨界發動機失效后飛機各運動參數的動態變化過程等因素的影響,這些因素在VMCL的適航符合性驗證中均是非常重要的。因此,本文使用人機閉環仿真計算VMCL的方法更為精確。
6 結束語
本文提出的利用人機閉環數學仿真來計算著陸進場最小操縱速度VMCL的方法,可以準確計算得到飛機的著陸進場最小操縱速度,并反映飛機各運動參數的動態變化過程。該方法在評估和改進飛機的設計方案,以及在指導飛行員的試飛操縱程序等工作中都具有一定的指導意義和應用價值。此外,通過虛擬試飛演示,還可以詳細研究傾斜角、重量等不同關鍵飛行參數對該型飛機最小操縱速度的影響。
[1] 中國民用航空局.CCAR-25-R4 運輸類飛機適航標準[S].北京:中國民用航空局,2011.
[2] Ohme P.A model-based approach to aircraft takeoff and landing performance assessment[R].AIAA-2009-6154,2009.
[3] Phillips W F,Niewoehner R J.Effect of propeller torque on minimum-control airspeed[J].Journal of Aircraft,2006,43(5):1393-1398.
[4] 鄭作棣.運輸類飛機適航標準技術咨詢手冊[M].北京:航空工業出版社,1995.
[5] 孟憲珍.著陸進場時的最小可操縱速度[J].飛行力學,1996,14(3):71-74.
[6] 賈重任,黃成濤,王立新.空中最小操縱速度的人機閉環數學仿真計算[J].北京航空航天大學學報,2013,39(5):580-584.
[7] Stevens B L,Lewis F L.Aircraft control and simulation[M].New York:Wiley,2003.
[8] 王崢華,史志偉.基于狀態空間法的橫航向非定常氣動力建模[J].飛行力學,2010,28(6):16-20.
[9] Hosman R,Van Der Geest P,Van Der Zee J.Development of a pilot model for the manual balked landing maneuver[R].AIAA-2009-5818,2009.
[10] Pool D M,Zaal P M T,Damveld H J,et al.Pilot equalization in manual control of aircraft dynamics[C]//Proceedings of the 2009 IEEE international conference on Systems,Man and Cybernetics.IEEE,2009:2480-2485.
[11] Wagner M,Webb C.VMCAflight test of the C-2A[R].Naval Air Warfare Center Aircraft DIV Patuxent River MD,2001.
[12] Lawrence J T,Draper-Donley M G.A review of minimum control airspeed test methodologies for carrier-based aircraft[C]//2005 AIAA Atmospheric Flight Mechanics Conference and Exhibit.2005:1-25.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
環球時報(2022-05-30)2022-05-30 15:16:57
汽車實用技術(2022年4期)2022-03-07 06:07:20
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
公民與法治(2016年4期)2016-05-17 04:09:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2013年5期)2013-03-11 16:08:17
