基于機器視覺的路基沉降監測方法研究
2016-01-25 06:24:37肖和華金鼎沸
鐵道科學與工程學報 2015年6期
關鍵詞:機器視覺
肖和華,金鼎沸
(1.長沙市規劃設計院有限責任公司,湖南 長沙 410007;
2.中南大學 交通運輸工程學院,湖南 長沙 410075)
?
基于機器視覺的路基沉降監測方法研究
肖和華1,金鼎沸2
(1.長沙市規劃設計院有限責任公司,湖南 長沙 410007;
2.中南大學 交通運輸工程學院,湖南 長沙 410075)
摘要:對路基沉降進行實時且有效的監測,對于維護工程質量,保障通車安全具有重要意義。為提高監測效率,降低監測成本,提出一種基于光筆式機器視覺測量系統的非接觸式沉降監測方法,將光筆置于監測靶面之上,通過一個CCD單相機對光筆進行實時監測,通過圖像處理的方法,計算出光筆垂直向下方向的位移,從而達到沉降監測的目的。試驗結果表明:監測斷面處的計算沉降值與實際沉降值基本吻合,相對誤差達到了1.75%和1.62%。
關鍵詞:沉降監測;機器視覺;光筆;圖像處理

路基沉降監測是道路施工以及工后運營維護的一項重要內容。但是,當前的沉降監測方法大多通過地下埋設沉降管,并通過硅微壓傳感或陶瓷微壓傳感來監測沉降管中壓力差的辦法實現沉降測量[1],此方法雖然精度高,但是由于是將沉降管與傳感器埋設于路基斷面,導致其更換困難,若傳感器失效,則會影響監測效率,增大監測成本。針對這種缺陷,有學者考慮使用機器視覺的方法,對路基沉降進行監測,即通過工業相機對沉降點進行連續拍攝,計算出沉降點的垂直向下位移,從而得出沉降值。這種方法避免了頻繁更換傳感器,提高了監測效率;也避免了更換沉降管時對路基路面的開挖,從而節約了監測成本。刑敬宏等[2]以激光光源代替沉降監測點,通過光斑位移來計算出路基沉降量,但是由于激光投影會造成光斑擴大,從而難以確定光學中心,造成較大的測量誤差。宋小齊[3]將激光技術與電子控制技術結合,開發了一套沉降監測系統,雖然預測精度得以提高,但仍無法適用于大范圍監測的情況。史磊[4]采用光學傳感器捕捉沉降監測特征點位移,但難以解決圖像處理中的噪聲問題,有時會引起較大的測量誤差。對此,本文以光筆代替沉降監測識別點,通過對光筆的垂直向下位移計算來實現路基沉降的監測,既能避免光斑擴散的情況,又能有效規避光學噪點,還能實現較大范圍的沉降監測。
1基本理論分析
1.1 視覺測量基本原理
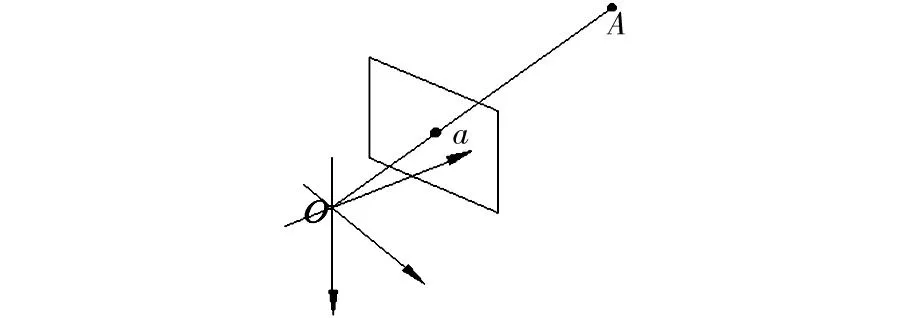
圖1 機器視覺模型Fig.1 Model of machine vision
如圖1所示,A為一被測點,O為相機坐標系,a為點A在相機成像平面上坐標系上的坐標點。視覺測量的基本模型是通過小孔成像原理得出的。小孔成像原理主要研究空間絕對坐標系中一點A(X,Y,Z)反映到圖像坐標系中的過程,而視覺測量是指由圖像坐標系中已知坐標的點來反推空間A點的某一坐標,具體過程如下:
設空間一點A的坐標為(X,Y,Z),其在相機坐標系中的像點坐標為(x,y,z)。那么從空間坐標系到相機坐標系有:

(1)
這其中R是3×3三階旋轉矩陣,T是三階的平移向量(R和T為相機參數,下文求解),這兩個矩陣也就決定了由空間絕對坐標系到相機坐標系的坐標變換關系,并且具有唯一性。
通過小孔成像模型易知,若不計誤差,則有:
(2)

(3)
f為相機焦距。
而成像平面坐標系和相機坐標系具有如下關系:
u=XNx+u0
(4)
v=YNy+v0
(5)
其中,u0和v0代表像點(點a)中心坐標;Nx與Ny代表單位距離內像素點的數量。那么,圖像坐標與空間絕對坐標的關系式可以總結如下:
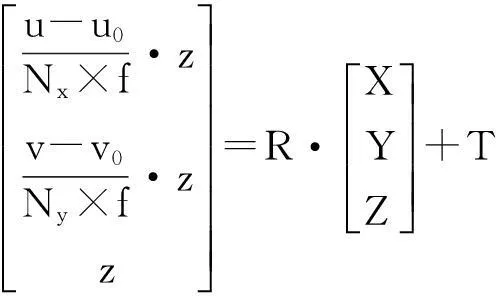
(6)
其中,Z為物象距離,在本文測量系中是已知的,故以通過以上方程求解X與Y即可得到測量計算目的。
1.2 光筆輔助測量原理
1.1節闡述了機器視覺的基本理論,可以使視覺測量理論上變得可行,但是要實現對被測點的識別,還需要一個光筆(鑲嵌高亮度LED燈的光學測棒)作為輔助工具,這個光筆使得相機能夠將監測點與監測背景區別開來。本測量系統采用中南大學CAD/CAM研究所自主研發制造的7點式光筆(如圖2所示)。

(a)7點式光筆;(b)光筆尺寸結構圖2 7點式光筆實物及尺寸Fig.2 Seven point light-pen and its size
如圖2(b)所示,A為沉降監測目標點,其余7點為相機識別控制點,根據前人理論,僅當控制點的數目大于等于3個時,A點坐標才是唯一的(三點透視原理參見文獻[5])。本文采用7點式對稱冗余結構,目的是通過直線BCD、直線ECH、直線FCG分別計算出A點的坐標,繼而求其平均,可以減小計算誤差。
1.3 相機標定
在機器視覺的模型中存在很多參數,有些參數為相機固有屬性,可通過說明書查閱,而對于相機平移和旋轉矩陣這些參數,只有通過標定來獲得。本文采用正方形黑白棋盤格標定板,通過Zhang標定算法[6]對相機進行標定,每小格尺寸為30 mm×30 mm,如圖3所示。
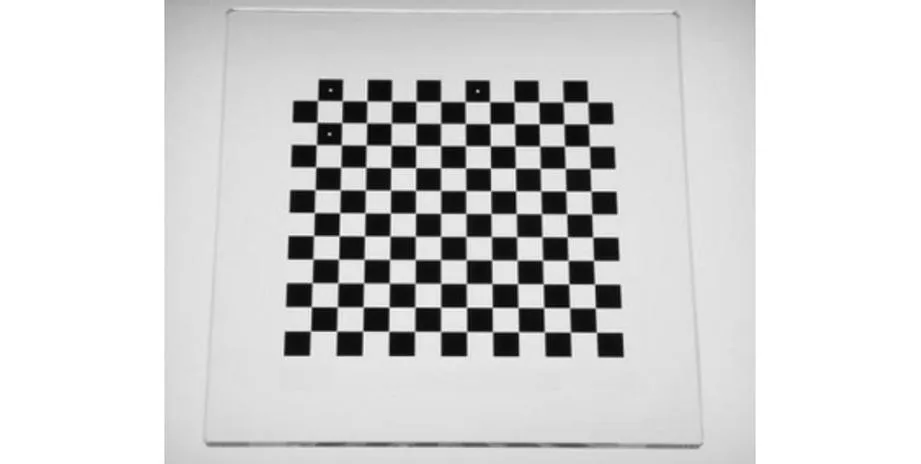
圖3 黑白棋盤格標定板Fig.3 Reversing checkerboard calibration board
2路基沉降監測系統組成
本文組建的路基沉降監測系統主要結構模塊如圖4所示。
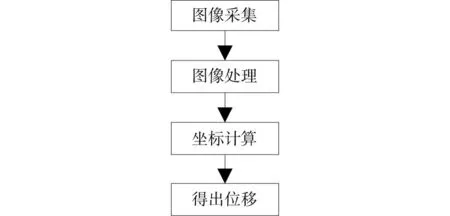
圖4 系統結構與流程Fig.4 Structure and process of the system
2.1 圖像采集模塊
本文采用DALSA Spyder Color CL彩色線陣CCD工業攝像機,攝像機提供了多種顏色輸出格式來滿足不同的顏色要求,包括RGB,RG/BG或者G。該款攝像機也集成了一些高級特性,比如平場校正、自動平衡,并且可對光源進行預校準,具有2048*4096的高分辨率,能通過無線實時傳輸數據,可滿足施工現場的沉降測量要求。
2.2 圖像處理模塊
由于采用光筆作為識別點,則無需采用復雜的圖像處理技術,僅需對采集到的圖像進行二值化處理[7-8](將全彩圖轉化為黑白圖)并提取光源中心點(計算出亮斑中心坐標)即可,大大簡化了圖像處理過程。本文采用OpenCV6.0進行圖像處理[9-10],其中一幅光源點二值化之后效果如圖5所示。
2.3 坐標計算模塊
經過標定之后,得出測量系統的內外參數,則根據1.1和1.2中的理論則可計算出監測點的橫縱坐標。
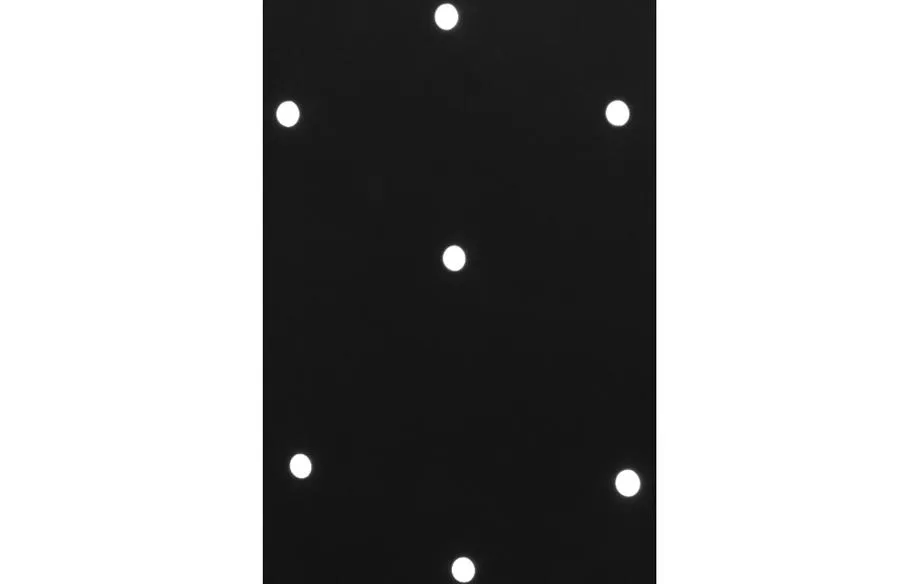
圖5 二值化效果圖Fig.5 Binarization renderings
2.4 沉降計算模塊
通過連續對目標點監測,得出其縱坐標隨時間變化的曲線,則可測出該點沉降。
3路基沉降監測實例
3.1 工程實現
湘北某高速公路在施工期間由于處于汛期,地基基礎易發生變化,故需要對路基進行實時監測來反映路基沉降狀況,以便實時維修管理。
在K280+10~K280+90這80 m范圍內均勻設置多個光筆靶點(跨度為6 m以內),在距施工距離15 m以上地區(路基以外區域)設置相機,對距離相機左右各40 m以內(太遠則相機無法采集圖像)的靶點進行連續90 d的監測(每天對每個監測點自動進行分析),通過監測點的垂直向下位移計算路基沉降。該系統布局如圖6所示。
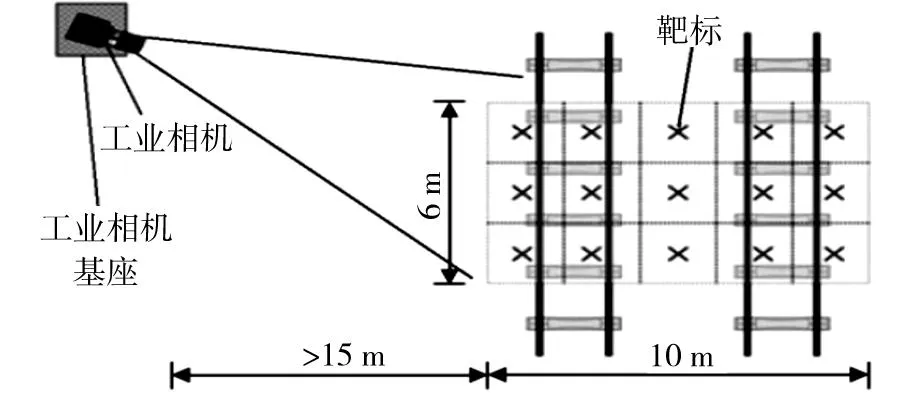
圖6 測量系統布局Fig.6 Measurement system layout
3.2 測量結果與分析
以K280+30和K280+70兩處監測斷面為例,將本系統部分沉降點的沉降監測值與實際沉降值(沉降管法所得沉降值)對比,計算相對誤差(式7),如表1所示。
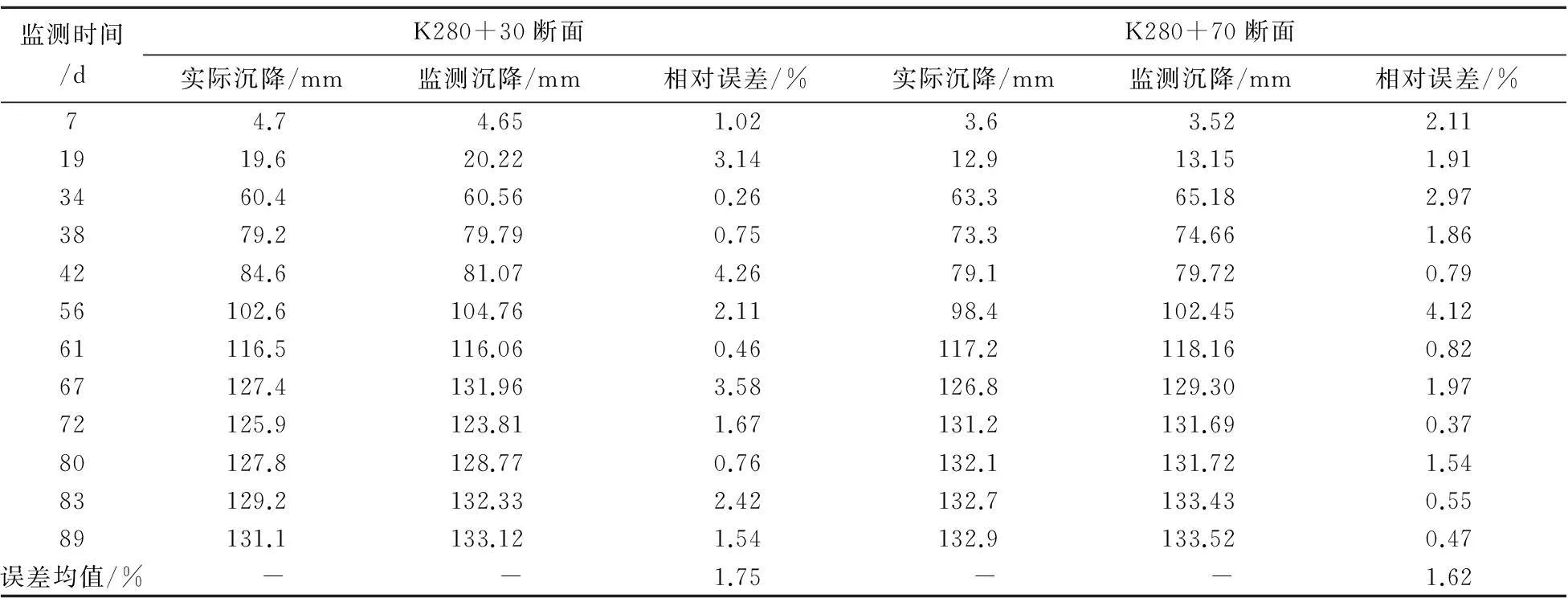
表1 監測效果對比
(7)
式中:δ為相對誤差;L為實際路基沉降值;L′為視覺的量系統的監測值。
由表1可見對于兩處監測試驗,本文光筆式機器視覺測量系統的監測精度與實際沉降較為吻合,相對誤差分別為1.75%和1.62%。表明本文方法具有良好的監測精度。
4結論
1)分析了機器視覺的基本理論,建立了完整的路基沉降監測模型。
2)將七點式光筆引入路基沉降測量系統,解決了特征點識別問題,極大方便了圖像處理的過程,提高了監測精度。
3)設計了一套光筆式機器視覺非接觸式測量系統,實現了較大范圍的路基沉降實時監測,可推廣應用于其他工程領域。
參考文獻:
[1] 邢敬宏,李向偉,趙良濤.一種改進的激光光斑中心檢測算法在路基沉降測量中的實現[J].自動化與儀器儀表,2014(6):205-207.
XING Jinghong,LI Xiangwei,ZHAO Liangtao.An improved laser spot detection algorithm in subgrade settlement measurement[J].Automation and Instrumentation, 2014(6): 205-207.
[2] 刑敬宏,張明新,趙良濤,等.基于嵌入式機器視覺的路基沉降監測系統研究[J].自動化與儀器儀表,2014(5):28-30.
XING Jinghong,LI Xiangwei,ZHAO Liangtao.Settlement monitoring system based on embedded machine vision roadbed[J].Automation and Instrumentation, 2014(6): 205-207.
[3] 宋小齊.激光聯合電子控制技術的路基沉降監測系統應用研究[J].中國鐵路,2014(1):62-65.
SONG Xiaoqi.Monitoring application of laser combined with electronic control systems technology for roadbed settlement[J].China Railway, 2014(1):62-65.
[4] 史磊.基于CCD圖像分析的路基沉降測量系統的開發[J].山西電子技術,2013(3):23-25.
SHI Lei.Development based of subgrade settlement CCD image measurement system based on analysis[J].Shanxi Electronic Technology, 2013(3):23-25.
[5] 劉一宇.光筆雙目視覺測量系統的研究[D].長沙:中南大學,2010.
LIU Yiyu.Study on light-pen binocular vision measurement system[D].Changsha:Central South University,2010.
[6] Zhang Z.A flexible new technique for camera calibration[J].Microsoft Corporation: Technical Report MSR-TR-98-71,2002.
[7] Adrian K, Grayb.Learning openCV[M].2nd edition.Sebastopol: O’Reilly Media,2008:78-80.
[8] Takashi G, Kozo S.History matching with iterative latin hypercube samplings and parameterization of reservoir heterogeneity[J].Journal of Petroleum Science and Engineering, 2014(114): 61-73.
[9] Heipke C.Overview of image matching techniques[C]// Proceeding of 16th OEEPE workshop on application of digital photogrammetric workstation.Lausanne[s.n.].1996: 173-189.
[10] Richard H, Andrew Z.Multiple view geometry in computer vision[M].2nd edtion.Cambridge: Cambridge University Press,2004: 239-262.
(編輯蔣學東)
A subgrade settlement monitoring method based on machine vision
XIAO Hehua1, JIN Dingfei2
(1.Changsha Planning & Design Institute Co., Ltd.Changsha 410007, China;
2.School of Traffic & Transportation, Central South University, Changsha 410075, China)
Abstract:The real-time and effectively monitor of subgrade settlement is of great significance to the quality of maintenance engineering and the ensurance of traffic safety.In order to improve the monitoring efficiency and reduce the cost of the monitoring, this paper presents a non-contact measurement system,waich is based on a light-pen machine vision measuring system.By putting the light-pen to the top of the monitoring target and using a CCD camera to monitor the light-pen, the vertical displacement of the light-pen, is then calculated,which achieves the purpose of settlement monitoring.The engineering practice shows that the calculated settlement value at monitoring sections are consistent with the actual settlement value,the relative error is 1.75% and 1.62%.
Key words:settlement monitoring; machine vision; light-pen; image processing
通訊作者:肖和華(1971-),男,湖南衡陽人,高級工程師,從事路橋設計研究;E-mail:xhhua1971@163.com
收稿日期:2015-05-03
中圖分類號:U416
文獻標志碼:A
文章編號:1672-7029(2015)06-1365-04
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30