昆明長水機場CFL—03邊界層風廓線雷達數據算法應用分析
2016-04-05 11:30:45和勁波
科技視界 2016年8期
關鍵詞:應用分析
和勁波
【摘 要】風廓線雷達作為一種以大氣湍流為主要探測對象的測風雷達,隨著風廓線雷達資料用途的拓展,對風廓線雷達回波信號功率譜數據處理提出了更高的要求。本文針對昆明長水機場CFL-03邊界層風廓線雷達系統回波信號功率譜數據處理算法進行了應用分析。
【關鍵詞】風廓線雷達;數據算法;應用分析
0 引言
昆明長水機場CFL-03邊界層風廓線雷達是一種具有低損耗接收、高效率低副瓣平板相控陣天線、模塊化全固態發射機、高低工作模式以及先進實用的信號處理技術等特點的脈沖多普勒晴空探測雷達。測風最小探測高度小于60米,最大探測高度為3000米至5000米,具有很強的空間和時間分辨率。能夠實時、連續探測各高度層大氣的水平風、垂直風以及大氣折射率結構常數等氣象要素隨高度以及時間變化的分布,為預報的準確性提供了可靠的必要輔助。
本文對昆明長水機場CFL-03邊界層風廓線雷達接收機處理后的回波信號功率譜數據處理算法進行了應用分析。
1 風廓線雷達原理
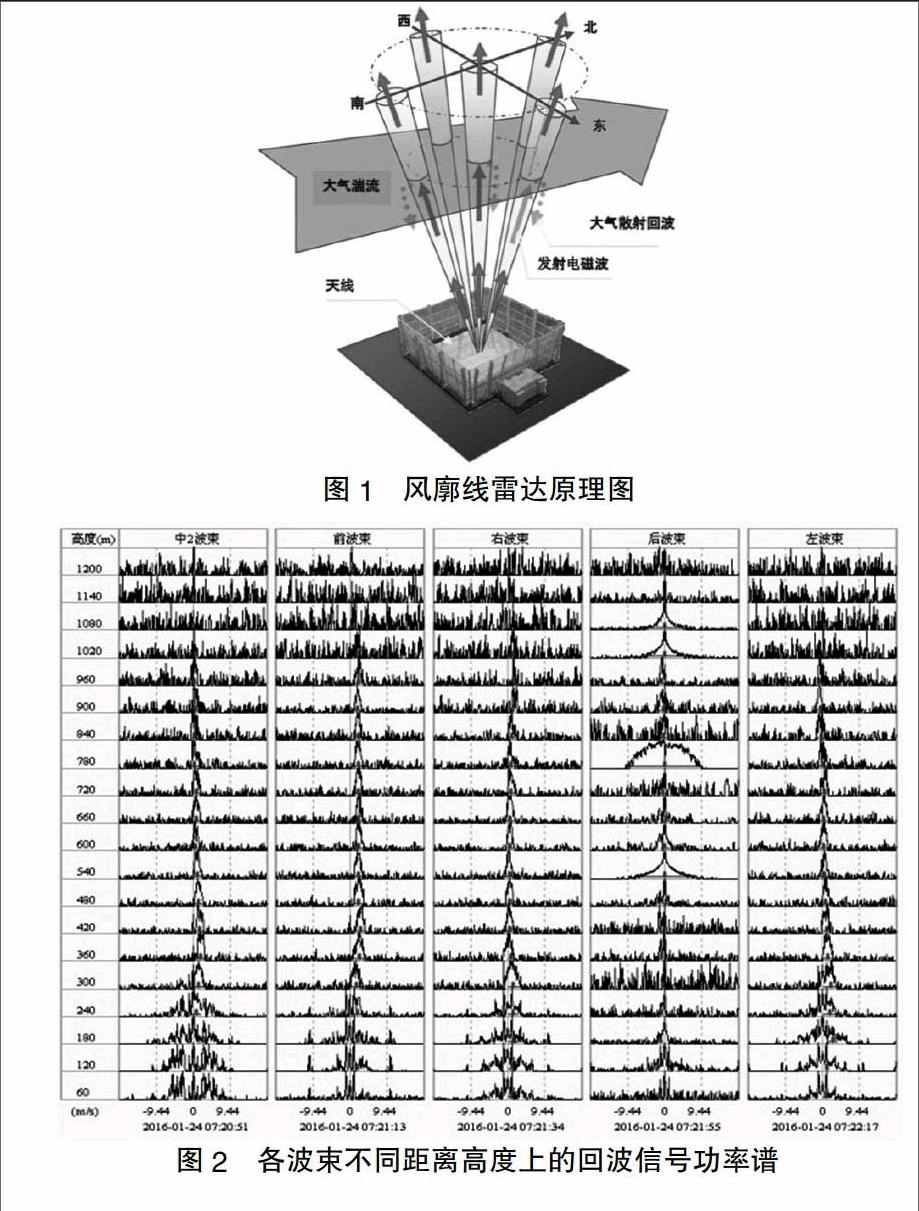
風廓線雷達主要以晴空大氣作為探測對象,所以也稱風廓線雷達為晴空雷達,它利用大氣湍流對電磁波的散射作用進行大氣風場的風速、風向以及大氣折射結構常數Cn2等要素的探測。風廓線雷達發射的電磁波在大氣傳播過程中,由于大氣湍流造成的折射率不均勻分布而產生散射,其中后向散射能量被風廓線雷達所接收。這個后向散射信號,通常存在于大氣湍流之中具有尺度為雷達波長的1/2左右的波數成分。湍流隨風漂移,通過觀測回波信號的多普勒信息,可以測定風矢量。在風矢量的探測中,雷達波束朝向垂直(天頂)方向,以及偏離垂直波數15°左右的東、西、南、北側,如圖1所示。
如圖1所示,風廓線雷達在各方向的探測中,雷達連續發射N個重復周期的探測脈沖,接收以空間分辨率刻度顯示的各高度層湍流產生的后向散射信號。接收到的回波信號經接收機處理后得到相應波束上各個不同距離高度上的回波信號的功率譜,如圖2。該功率譜經數據處理算法處理后,最后得出各對應高度層上大氣風場的風速、風向以及大氣折射結構常數Cn2等氣象要素。
2 功率譜數據處理算法應用分析
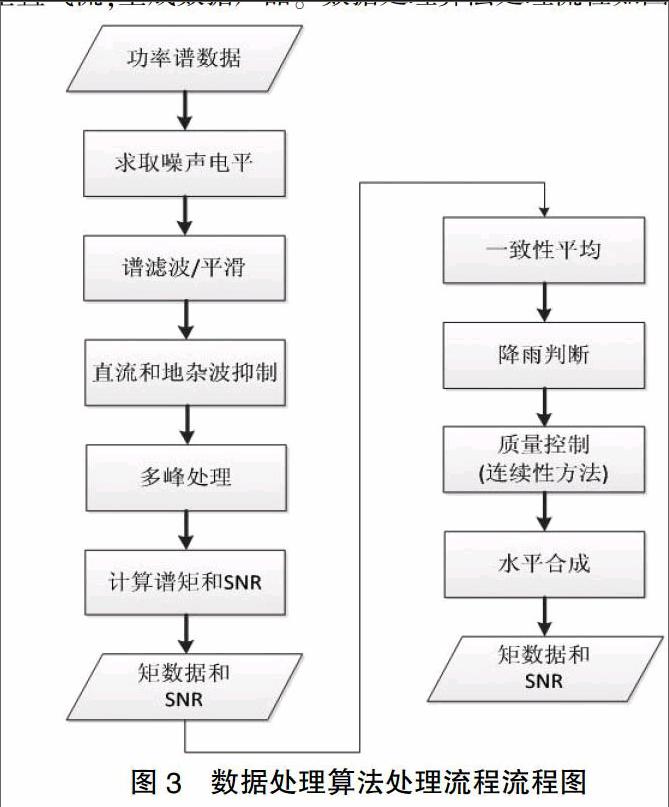
CFL-03邊界層風廓線雷達系統回波信號功率譜數據處理算法主要步驟為:①對功率譜數據進行噪聲電平計算、譜濾波、地雜波抑制和識別、風譜信號識別和提取、矩估計,求出回波功率、徑向速度、譜寬和SNR等參數;②進行質量控制,剔除野值和異點;③合成水平風速、風向和垂直氣流,生成數據產品。
2.1 求取噪聲電平
噪聲電平的準確性影響到風廓線雷達回波信號功率、SNR、Cn2等參數的計算和結果。該雷達系統采用基于高斯白噪聲譜的統計特性(譜序列的方差是其期望的平方)的“噪聲電平客觀確定法”來求取噪聲電平,通過迭代逐步去除包含大氣回波信號的譜線,使得參數R1、 R2逐漸逼近于1。
2.2 譜濾波/平滑
由于雷達回波信號一般都很微弱和散亂,同時部分窄而強的干擾信號會被誤認為大氣回波信號。采用譜濾波/平滑后,可以有效改善譜的形狀,消除干擾信號影響,利于風譜的識別并提高譜峰的識別能力。
2.3 地物雜波抑制
地物雜波的抑制和識別是數據處理中非常重要的一個環節,由于風廓線雷達的回波信號非常微弱,地物雜波其強度往往都大于風譜信號,若回波信號識別在地物雜波上,將會造成嚴重的錯誤。該雷達數據處理算法通過識別指定高度以下直流對稱的譜峰并抑制,合理的去除地物雜波對雷達回波功率譜影響。
2.4 多峰處理
由于噪聲、干擾及地雜波等的影響使得在某些高度層上的譜序列中呈現出多個譜峰,其幅度有時要強于大氣回波信號。所謂的多峰處理就是對譜序列進行譜峰搜尋和識別,選取出大氣回波譜峰進行徑向速度、譜寬和SNR的計算。該雷達數據處理算法采用的多峰處理方法,可分為以下四個步驟:①對于某個距離門選取三個功率值在噪聲電平之上的連續區域(連續區域最寬者、連續區域峰值最大者、連續區域SNR最大者);②對每個區域利用函數求極值,確定其中包含的一個或數個譜峰,為了避免將其中應有的起伏視為一個新的譜峰,在處理時乘以平滑函數,或根據區域的最大值設定劃分門限,得到一個或數個譜峰;③對選出的譜峰,計算其徑速、譜寬和SNR等;④根據連續性原則和權重函數,在所有距離門上選取適當的譜包作為大氣回波信號。
2.5 譜矩及SNR的計算
2.6 一致性平均
昆明長水機場CFL-03風廓線雷達采用經典的一致性平均處理方法,通過四個參數(一致性窗口范圍、一致性窗口門限、平均時間和每個高度層兩個數據間允許最大誤差之內的合理數目)的選擇和設置,挑選合理數據進行平均,得到最終結果。
2.7 降雨判別
降水能導致嚴重的測風錯誤,尤其是當雷達有效體積內的湍流達不到均勻性要求。但是由于降水回波具有著垂直波束的回波表現為信號強,信噪比高等特點。因此可以利用回波信號在強度和速度上的差別進行降水發生與否的判別。
判定方法為:將待判斷的數據點的速度與信噪比帶入上式,L>0則判定此點有降水“污染”;L<0則判定此點無降水“污染”。此處判定的前提是:風廓線雷達測得朝向雷達運動的速度為正,遠離雷達運動的速度為負。
2.8 連續性方法
一致性平均并不能完全去除數值中存在的不合理值,為了保障探測數據的有效性和排除探測過程中受到諸多的影響因素,必須對數據進行進一步的質量控制。該雷達數據處理算法采用連續性方法,依據實際風數據在時間和高度上的連續性和一致性對數據進行控制。主要分為以下幾個部分:
第一,對數據進行去模糊處理。
第二,對一定時間間隔內的每個波束上的數據進行時間和高度上的連續性進行檢驗。
第三,對缺失的數據進行時間和空間上的插值。對于缺失的數據,利用同一時間周圍數據的插值將其代替。如果高度間隔超過了500m,不對這個缺失的數據進行插補。
2.9 水平風合成
3 結論
本文分析了昆明長水機場CFL-03邊界層風廓線雷達回波信號功率譜的噪聲電平計算方法、數據平滑、多峰處理、一致性平均、時間相關性分析和空間相關性分析等算法,進行風譜信號的提取和識別以及風場數據的反演和質量控制,這些算法在實際的運用中,算法有效、輸出結果清晰明確、數據產品可用、可信。
【參考文獻】
[1]胡明寶.風廓線雷達探測與應用[M].氣象出版社,2015.
[2]朱斌,高仲輝.風廓線雷達探測系統中的譜數據處理[J].現代雷達,2003,25(11).
[3]胡明寶,賀宏兵,等.風廓線雷達探測模式分析與設計[J].現代雷達,2012,34(11):26-30.
[責任編輯:楊玉潔]
猜你喜歡
科學與財富(2016年15期)2016-11-24 14:51:09
今傳媒(2016年10期)2016-11-22 13:09:35
體育時空(2016年9期)2016-11-10 20:40:02
課程教育研究·學法教法研究(2016年21期)2016-10-20 17:55:49
中學課程輔導·教師教育(中)(2016年9期)2016-10-20 15:26:49
中國科技博覽(2016年19期)2016-10-19 12:22:05
中國科技博覽(2016年18期)2016-10-19 11:24:50
中國科技博覽(2016年18期)2016-10-19 11:20:01
電腦知識與技術(2016年21期)2016-10-18 21:37:19
科學與財富(2016年28期)2016-10-14 20:19:20