溫室定時輪流噴霧控制系統設計與應用
2016-05-03 07:13:50吳霞王世榮王長軍羅昀
江蘇農業科學 2016年3期
關鍵詞:單片機
吳霞+王世榮+王長軍+羅昀

摘要: 溫室中的溫度和濕度是決定農作物生長的關鍵因素之一,利用噴霧設備進行噴霧是目前進行溫室降溫和加濕的主要方式,目前溫室噴霧大多采用人工控制的方式,不但精確度不高且浪費人力,最主要還會出現噴霧不及時導致作物減產的問題。針對溫室固定式噴霧設備設計定時輪流自動噴霧控制系統,可實現溫室分區域定時輪流自動噴霧,控制系統帶有自主設定功能,用戶可根據不同作物需求、不同季節調整噴霧用水量和休息間隔,達到精確控制溫室溫濕度的目的,實現溫室作物增產增效的目的。
關鍵詞: 溫室;定時輪流噴霧;控制系統;單片機
中圖分類號: S24;TP273 文獻標志碼: A 文章編號:1002-1302(2016)03-0404-03
寧夏地處中國西北內陸干旱地區,屬于重度缺水區。隨著寧夏經濟持續快速發展,水資源供需矛盾日趨突出[1-2]。2007年,寧夏把發展設施農業和現代農業作為農業結構調整的主攻方向,目前寧夏設施農業總面積已超過80萬 hm2。隨著設施農業的迅猛發展,對溫室智能化監控與自動化管理的要求日益迫切,研究開發并推廣使用性能優越、運行可靠的溫室智能控制系統將是溫室生產走向產業化和高效化的必由之路[3-5]。
設施溫室中作物需水完全靠人工灌溉補給,可控性較強,因此智能化灌溉控制系統是目前研究的重點,溫室噴霧就是其中一個研究方向,近些年已經涌現出很多研發成果。張俊雄等研發了溫室內移動對靶噴霧系統,可實現對籬架型植物以0.2 m×0.2 m區域為靶標的精準噴霧[6]。石建業等研制了智能遙控拉移動式溫室專用噴霧機,為溫室生產者提供了一種無需人工背負、施藥效率高、價格低廉、使用方便的農藥噴霧工具[7]。梁謙等研究表明,小型行走式噴霧系統對塑料大棚雙孢菇土壤含水量、噴灑均勻度、雙孢菇產量都有積極的影響[8]。玄子玉等研發了基于單片機的變量噴霧控制器,可根據需要自動調節噴霧量[9]。現有研究成果雖然能夠滿足溫室溫濕度控制精確度的需要,但是存在成本高、操作復雜、運行維護不便等問題,難以大量推廣使用。
近幾年,寧夏多個農業科技示范園區采用了自動化的溫室控制設備和系統,包括溫度、濕度、CO2濃度、光照等數據采集設備、水肥一體化智能灌溉施肥系統等[10-12],這些設備和系統的核心控制部件均由北京、上海、南京等發達地區研究和開發,部分尖端設備是從日本、美國等發達國家引進[13-14]。引進設備和系統功能完善、性能優越、控制精度高,可準確監測和控制溫室環境,提高溫室作物產量與品質,但運行維護成本較高,難以長期使用。而寧夏在設施溫室環境監測和自動化控制方面的研究落后且進展緩慢,缺乏實用的研究成果和掌握核心技術的科技人員,制約了寧夏設施農業的現代化發展[15-16]。
針對上述問題,本研究選擇寧夏設施溫室需求較大的溫室噴霧控制設備為研究對象,設計了溫室定時輪流噴霧控制系統,可實現對溫室分區域定時輪流自動噴霧,提高溫室溫濕度控制精度。該控制系統功能簡單、操作方便、成本低廉,可滿足更多農戶的需求。
1 溫室定時輪流噴霧控制系統總體設計
溫室噴霧由于噴霧面積過大水壓不足的問題,經常影響噴霧效果[17]。針對固定式噴霧系統水壓不穩定的問題,設計了分區域定時輪流自動噴霧控制系統。首先根據溫室大小和作物噴霧需求將溫室劃分為若干個不同區域,然后各區域分別安裝噴霧管道和電磁閥,最后由主管道將各站連接在一起,并安裝噴霧控制器、水量計數器、壓力罐、水泵等,形成一個噴霧系統。整個噴霧系統由控制器自動控制,根據程序設定的噴霧時間和間隔,依次啟動和關閉各站的電磁閥,實現整個溫室定時輪流自動噴霧;同時通過水泵和壓力罐保證噴霧水量和壓力的持續穩定。溫室定時輪流自動噴霧系統如圖1所示。
1.1 分區域噴霧管道布設
為了保證溫室噴霧水量及水壓充足穩定,本控制系統采用了分區域輪流噴霧的方式,即將大型溫室分為若干小區域,每個區域安裝若干條噴霧管道,每條管道安裝若干個噴頭,形成噴霧管網;每個區域輪流進行噴霧,可保證每個區域有充足的水量和穩定的水壓,提高噴霧效果。具體溫室噴霧管道可根據實際情況進行布設,例如:1個8 m×80 m的溫室可為8個區域,主管道用20 mm的鋁塑管,支管道用20 mm的PE管,噴霧頭密度1.5 m×2 m。
1.2 噴霧控制器設計
噴霧控制器是整個系統的核心,用于控制噴霧系統自動噴霧。為了達到簡單易用、穩定可靠、低成本的需求,在滿足
所需功能的基礎上控制器盡可能采用較少的電子元件,主要包括核心單片機、LCD顯示屏、操作按鈕、繼電器輸出等部件。控制器安裝于主管道與與壓力罐之間,控制器上的繼電器與各站的電磁閥一一對應連接,控制器可通過繼電器控制電磁閥的開關,實現自動輪流噴霧。
1.3 噴霧水壓處理
噴霧水量及水壓的持續穩定是保證噴霧效果的關鍵,該控制系統即通過分區域噴霧降低單次噴霧用水量及水壓,同時也通過安裝水泵和壓力罐來穩定噴霧水壓,起到平衡水量及壓力的作用。正常情況下,水泵可在無人控制的情況下工作,并可根據用水量的變化,自行調整水泵開停次數與工作時間,保證向噴霧管道連續穩定供水。水泵和壓力罐一般可根據溫室具體情況選定。
2 溫室定時輪流噴霧控制系統硬件設計
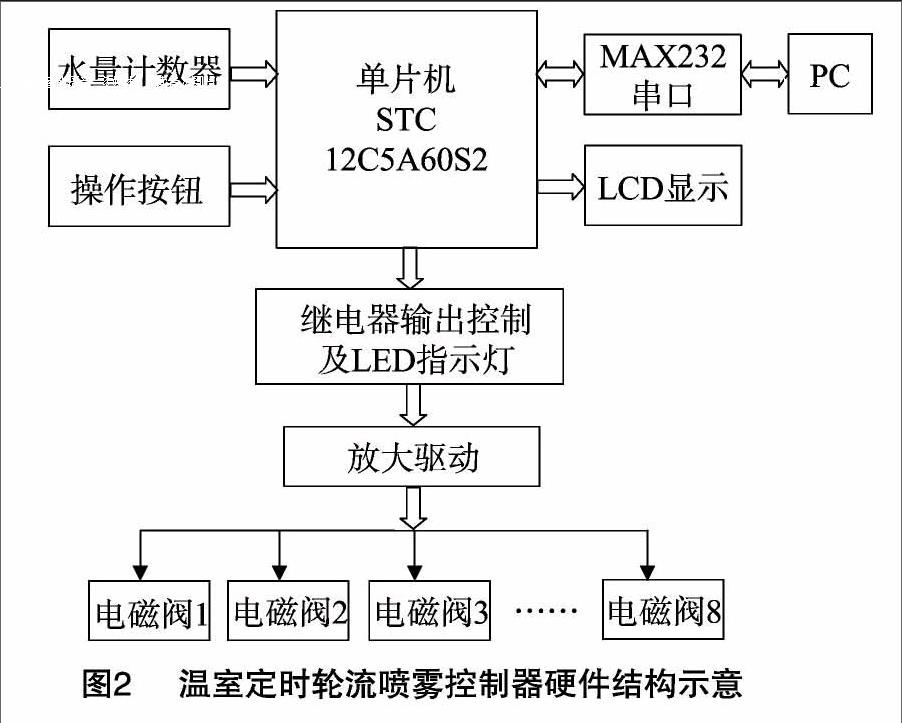
控制器是整個定時輪流噴霧控制系統的關鍵,而決定控制器性能和成本的關鍵就是微處理器,相對于工業級控制器相言,溫室自動控制系統對微處理器速度要求不高,故選擇一般的8位微處理器即可滿足要求,而且可以節約控制器研發成本。本控制器核心微處理器選用STC12C5A60S2單片機,其他相關硬件構成有12864LCD顯示電路、水量計數器控制電路、操作按鈕電路、繼電器輸出LED指示燈電路、MAX232串口通訊電路等,控制器硬件結構如圖2所示。
2.1 核心處理器
本控制器采用STC12C5A60S2單片機,該單片機是高速、低功耗、超強抗干擾的新一代8051單片機,指令代碼完全兼容傳統8051,但速度快8~12倍[18]。該單片機有4組8位 I/O口,3個定時計數器,1個全雙工串行口,具有6個中斷源,3個定時計數器中斷,2個外部中斷,1個串口中斷。內部帶有1 kb靜態非易失性EEPROM和看門狗,利用該芯片的 EEPROM 存儲數據可防止掉電丟失[19]。使用該芯片既可以滿足噴霧系統處理速度要求,又具有簡單的記憶存儲功能,以免掉電數據丟失,避免重復設置的麻煩,而且價格低廉,滿足控制器低成本要求。
2.2 水量計數器
本控制器的水量計數器采用霍爾流量傳感器,主要由塑料閥體 、水流轉子組件和霍爾傳感器組成。將它裝在噴霧系統主管道上,當水通過水流轉子組件時,磁性轉子轉動并且轉速隨著流量變化而變化,霍爾傳感器輸出相應脈沖信號,反饋給控制器,由控制器判斷水流量的大小。它具有反映靈敏、壽命長、動作迅速、安全可靠、連接方便等優點。霍爾流量傳感器輸出的脈沖信號通過放大電路與單片機外部中斷引腳相連接,通過對脈沖進行計數來計量噴霧用水量。
2.3 LCD顯示
本控制器采用XY12864G LCD顯示屏,用于顯示相關數據以及各操作過程和狀態,操作簡單,智能化程度高。該顯示屏帶有1個16×16的點陣液晶顯示模塊,可顯示4行漢字,每行可顯示8個漢字或16個英文字符或數字,也可顯示圖形,藍底白字,清晰美觀[20]。LCD顯示屏采用并口工作方式與單片機相連,并連接1個10 kΩ電位器用于調節顯示屏亮度,以便根據不同光照條件進行亮度調節,使顯示更加清晰。
2.4 操作按鈕電路
本控制器設計了6個操作按鈕,包括1個復位按鈕,1個手動/自動工作模式轉換按鈕,4個系統設置及加減操作按鈕。
2.5 繼電器輸出及LED指示燈電路
本控制器設計了8個輸出控制繼電器,最多可支持8站輪流噴霧,每個繼電器帶有1個LED指示燈,用以指示繼電器工作狀態。每個繼電器通過功率放大驅動與1個電磁閥連接,單片機通過控制繼電器的閉合帶動電磁閥的打開與關閉,實現對噴霧系統的自動控制。
2.6 MAX232串口通訊電路
采用MAX232CPE芯片設計,主要作用是將單片機輸出的TTL電平信號轉換成PC機能接收的RS232電平信號或將PC機輸出的RS232電平信號轉換成單片機能接收的TTL電平信號,以此實現單片機與PC機的通訊。用于通過PC機向單片機寫入程序和通過PC機(上位機)控制噴霧系統。
3 溫室定時輪流噴霧控制系統軟件設計
定時輪流噴霧系統的控制程序采用C語言編寫,利用Keil uVision4進行編寫并編譯生成Hex文件,再燒錄到單片機內。控制程序的工作過程為:當系統接通電源或按下復位按鈕后,首先進行初始化工作,包括I/O口初始化、時鐘初始化、LCD顯示屏初始化等;初始化完成后讀取單片機EEPROM中存儲的參數開始工作,控制器默認進入自動工作方式,首先啟動第1站繼電器開始噴霧,同時水量計數器進行計數,達到系統設定的噴霧水量后關閉繼電器停止噴霧,緊接著啟動第2站進行噴霧,依次類推,直至所有站點全部噴霧完成;然后系統進入停止階段,直到設定的休息時間結束再次啟動噴霧繼電器進行輪流噴霧。在噴霧的同時程序每隔 100 ms進行按鍵掃描,如有按鍵操作則停止噴霧,進入相關的參數設定程序。
另外,系統還設計了手動控制方式,可通過自動/手動按鈕進行工作方式的切換。手動控制方式工作過程為:首先由操作人員按加減按鈕選擇要噴霧的站點,然后按下開始按鈕進行噴霧,停止噴霧時按下停止按鈕即可。在整個程序運行過程中,LCD顯示屏和LED指示燈實時顯示各項操作過程和系統狀態,方便用戶清晰直觀地了解噴霧系統運行狀況。程序流程如圖3所示。
部分C語言程序設計的代碼如下:
init();//系統初始化
while(welcome_sec>0)
display_welcome();
while(1)
{
keyscan(); //按鍵掃描
if(status_control==0)
{
if(set==0)
{
display();//LCD顯示
auto(); //自動控制
}
}
if(status_control==1)
{
if(set==0)
{
display();//LCD顯示
manual();//手動控制
}
}
}
4 系統應用情況
本控制系統已經于2014年5月份在寧夏園林場枸杞育苗溫室進行了初步試驗,該溫室寬8 m、長60 m,主要進行枸杞扦插育苗。根據枸杞育苗需要,按長度將溫室劃分為6個區域,即6站,每站長9 m。首先沿溫室長度方向布設噴霧主管道,然后各站中每隔1.5 m布設1條支管道,最后支管上每隔1.5 m安裝1個噴霧頭,即每站控制30個噴霧頭。水泵和壓力罐安裝在溫室靠近水源的地方,控制器安裝在溫室操作間,控制器通過信號線與水泵、各站電磁閥相連,形成一個整體噴霧系統。經過半年多的試驗,定時輪流噴霧系統可以根據用戶的設定準確進行噴霧,保證溫室內的溫度和濕度符合枸杞育苗需求,使得枸杞扦插育苗的成活率有較大提高,而且大大降低了人工成本。同時,在寧夏永寧縣2座種植蘑菇的溫室安裝了定時輪流噴霧控制器。該溫室已經有噴霧管道,而且已經按不同蘑菇生長狀況進行了分區,平時主要靠人工操作,常常因控制不準確影響蘑菇的生長。安裝了控制器以后,不但節省了人力且控制精度大大提高,受到用戶的歡迎。另外,本系統操作簡便、成本低廉,且易于安裝維護,可滿足一般溫室噴霧需求。
參考文獻:
[1]閆曉紅,段漢明,吳 斐. 寧夏水資源現狀、問題及對策[J]. 地下水,2011,33(1):117-118.
[2]王志良,楊 婷. 寧夏水資源可持續利用的理性思考[J]. 水土保持研究,2006,13(6):278-281.
[3]康 義. 寧夏設施農業發展現狀及對策[J]. 寧夏農林科技,2012,53(5):56-57,67.
[4]張耀武. 寧夏設施農業產業化發展研究[J]. 農業科學研究,2011,32(4):54-59.
[5]溫學萍,俞鳳娟,張 翔,等. 農業物聯網技術在寧夏設施農業中推廣應用初探[J]. 寧夏農林科技,2014(5):13-14,28.
[6]張俊雄,曹崢勇,耿長興,等. 溫室精準對靶噴霧機器人研制[J]. 農業工程學報,2009,25(增刊2):70-73.
[7]石建業,任生蘭,馬彥霞,等. 智能遙控拉移動式溫室專用噴霧機的研制[J]. 農業科技與裝備,2014(7):26-27.
[8]梁 謙,賈生海,安進強. 塑料大棚雙孢菇小型行走式噴霧系統
灌溉研究[J]. 山西農業科學,2011,39(8):869-871.
[9]玄子玉,張玉峰,張玲玉. 基于STC單片機的變量噴霧控制器設計[J]. 林業機械與木工設備,2011(9):43-45.
[10]郭正禮,張耀武,吳靈捷. 寧夏設施農業市場問題研究[J]. 寧夏社會科學,2008(6):62-66.
[11]張衛東,劉書林,張偉亮,等. 西北地區日光溫室環境調控技術[J]. 北方園藝,2012(20):34-35.
[12]李萍萍,王紀章. 溫室環境信息智能化管理研究進展[J]. 農業機械學報,2014,45(4):236-243.
[13]Qi R,Qin L L,Xue M S,et al. The design and application of a greenhouse control system based on CAN[J]. Industrial Instrumentation&Automation,2005(3):17-20.
[14]Gomez-Melendez D,Lopez-Lambrano A,Herrera-Ruiz G,et al. Fuzzy irrigation greenhouse control system based on a field programmable gate array[J]. African Journal of Agricultural Research,2011,6(11):2544-2557.
[15]吳小偉,史志中,鐘志堂,等. 國內溫室環境在線控制系統的研究進展[J]. 農機化研究,2013(4):1-7,18.
[16]杜尚豐,李迎霞,馬承偉,等. 中國溫室環境控制硬件系統研究進展[J]. 農業工程學報,2004,20(1):7-12.
[17]趙德菱,高崇義,梁 建. 溫室內高壓噴霧系統降溫效果初探[J]. 農業工程學報,2000,16(1):87-89.
[18]王 鑫,崔忠林,劉 建. 基于STC12C5A16S2的溫度采集系統的設計[J]. 微型機與應用,2012,31(20):24-26,29.
[19]魏超全,孫長勝,陳家果,等. 基于STC12C5 A60S2的礦用多參數傳感器硬件電路設計[J]. 煤礦機電,2014(2):34-38,41.
[20]李金群. 基于51單片機的12864液晶圖文顯示研究[J]. 機電信息,2010(36):139-140.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
