基于交通區(qū)域中心的交互式導(dǎo)航研究
2016-06-17 21:20:03黃偉力詹求翔
科技經(jīng)濟市場 2016年3期
黃偉力 詹求翔
摘要:基于交通區(qū)域中心的交互式汽車導(dǎo)航是一種分布式中心的動態(tài)路徑誘導(dǎo),改變了中心式導(dǎo)航“中心唯一性”的特點,按照交通區(qū)域的特點劃分為多個交通區(qū)域中心,通過與駕駛員交互,獲得交通流量的精準數(shù)據(jù),各交通區(qū)域中心協(xié)同完成導(dǎo)航任務(wù)。
關(guān)鍵詞:交互式導(dǎo)航;交通區(qū)域中心;動態(tài)路徑誘導(dǎo)
0 引言
汽車導(dǎo)航按誘導(dǎo)路徑的生成方式可分為分布式誘導(dǎo)和中心式誘導(dǎo);按交通信息的性質(zhì),可分為靜態(tài)路徑誘導(dǎo)和動態(tài)路徑誘導(dǎo)。歐洲的Ali-Scout和日本的DRGS是中心式動態(tài)交通誘導(dǎo)系統(tǒng)的典型代表,美國的交通誘導(dǎo)系統(tǒng)研究也逐漸從分布式誘導(dǎo)轉(zhuǎn)向中心式誘導(dǎo),我國北京、上海、深圳等大城市在動態(tài)交通誘導(dǎo)方面也有一些研究和應(yīng)用,仍處于起步階段。本文提出一種基于分布式中心的動態(tài)導(dǎo)航思路,設(shè)計了基于交通區(qū)域中心的交互式汽車導(dǎo)航系統(tǒng)總體框架,并探討與之相關(guān)的交通區(qū)域中心的合理劃分方法,基于交互式數(shù)據(jù)的交通流量預(yù)測,以及動態(tài)分層路徑誘導(dǎo)技術(shù)。
1 系統(tǒng)框架設(shè)計
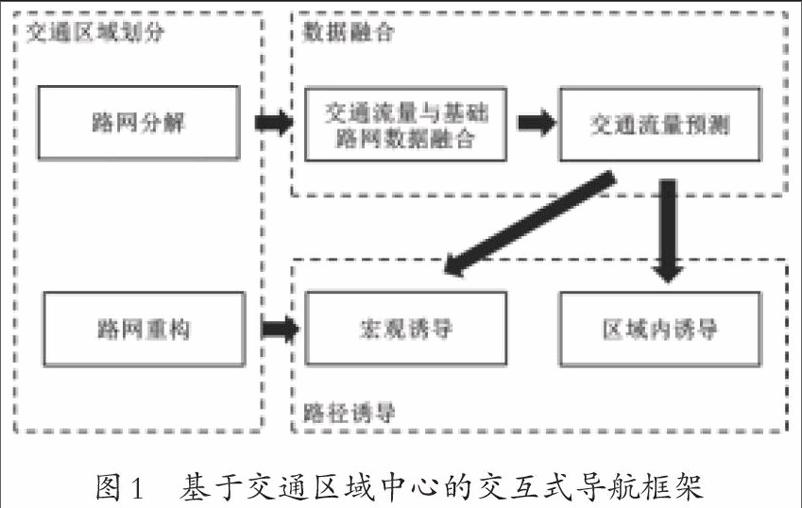
在現(xiàn)實道路交通網(wǎng)絡(luò)中,交通流處于一個多維、時變、隨機的復(fù)雜系統(tǒng)中,各種類型、不同程度的交通事件時有發(fā)生,各種不同性質(zhì)、不同等級的交通擁擠隨機產(chǎn)生。傳統(tǒng)的交通誘導(dǎo)系統(tǒng)以路網(wǎng)靜態(tài)地理信息進行交通誘導(dǎo),由于只考慮道路的空間屬性,而沒有考慮道路上的實時交通流運行特性,只能向出行者提供距離最短路徑或行駛方向引導(dǎo),其所起的作用十分有限,達不到對路網(wǎng)交通流進行優(yōu)化分配的目的。分布式誘導(dǎo)和中心式誘導(dǎo)在處理大規(guī)模路網(wǎng)動態(tài)交通流問題上也均存在一些不足之處。因此,基于交通區(qū)域中心的交互式汽車導(dǎo)航方案合理利用整合駕駛員的決策數(shù)據(jù),既具有分布式誘導(dǎo)的并行性和靈活性,能滿足汽車導(dǎo)航實時性的要求,又具有中心式誘導(dǎo)宏觀性和統(tǒng)一性,以避免Braess悖論現(xiàn)象的出現(xiàn),為大規(guī)模路網(wǎng)動態(tài)交通誘導(dǎo)提供了一個新思路。系統(tǒng)框架包括交通區(qū)域劃分,數(shù)據(jù)融合,路徑誘導(dǎo)三部分,如圖1所示。交通區(qū)域劃分包括路網(wǎng)的劃分和重構(gòu),數(shù)據(jù)融合包括交通流量與基礎(chǔ)路網(wǎng)數(shù)據(jù)融合和交通流量預(yù)測,路徑誘導(dǎo)包括區(qū)域內(nèi)誘導(dǎo)和宏觀誘導(dǎo)。
2 相關(guān)技術(shù)
2.1 交通區(qū)域劃分
交通區(qū)域的合理劃分是實現(xiàn)分布式導(dǎo)航的關(guān)鍵步驟,根據(jù)交通的關(guān)聯(lián)性將道路網(wǎng)絡(luò)劃分為若干個交通子區(qū),保持交通子區(qū)內(nèi)部高內(nèi)聚,交通子區(qū)之間低耦合。道路交通網(wǎng)絡(luò)可以看作是一個復(fù)雜網(wǎng)絡(luò)系統(tǒng),復(fù)雜網(wǎng)絡(luò)系統(tǒng)的社團劃分算法對道路交通網(wǎng)絡(luò)的交通子區(qū)劃分同樣有效。一個交通子區(qū)等價于一個社團,以交叉路口為結(jié)點,道路為邊,結(jié)合道路寬度、流量等屬性,采用凝聚算法和分裂算法均可以獲得交通子區(qū)的有效劃分。對大規(guī)模城市路網(wǎng)還可以考慮在HAMA平臺下使用并行社團發(fā)現(xiàn)算法實現(xiàn)交通子區(qū)的快速劃分。
2.2 交互式數(shù)據(jù)融合
道路網(wǎng)絡(luò)的實時流量受到各種因素的影響,準確預(yù)測流量可以提高路徑誘導(dǎo)的質(zhì)量。路徑誘導(dǎo)需要了解導(dǎo)航請求發(fā)出之后一段時間內(nèi)的途經(jīng)道路的擁堵情況。目前,道路流量監(jiān)測能準確的了解當前各道路的交通情況,但道路流量數(shù)據(jù)是動態(tài)的,多變的。用靜態(tài)的流量監(jiān)測數(shù)據(jù)作為路徑誘導(dǎo)的依據(jù),可能會計算出無效的路徑。通過與駕駛員交互,獲取駕駛員的決策數(shù)據(jù)可以提高道路流量數(shù)據(jù)的準確性。基于交互式數(shù)據(jù)可以進行流量的精準預(yù)測,及時了解用戶決策路徑的流量更新,為突發(fā)流量預(yù)警提供支持。
2.3 分層誘導(dǎo)算法設(shè)計
分層誘導(dǎo)算法分為區(qū)域間路徑選擇算法和區(qū)域內(nèi)路徑選擇算法。區(qū)域間路徑選擇算法是區(qū)域間的宏觀路徑選擇算法,將交通區(qū)域中心作為一個整體,每個交通子區(qū)要維護一張短期交通流量預(yù)測表,實現(xiàn)交通子區(qū)級的動態(tài)最短路徑計算。區(qū)域內(nèi)路徑選擇算法則只負責(zé)區(qū)域內(nèi)的最優(yōu)路徑計算,由于交通子區(qū)規(guī)模較小,其流量在較短的時間周期內(nèi)可以視為是不變的,可采用靜態(tài)最短路徑計算方法。
3 小結(jié)
基于交通區(qū)域中心的交互式汽車導(dǎo)航作為一種分布式中心的動態(tài)路徑誘導(dǎo),將駕駛員決策數(shù)據(jù)反饋于交通路網(wǎng),有效預(yù)測動態(tài)交通流量;交通區(qū)域中心的分布式結(jié)構(gòu)有利于實施并行計算,以完成時效性要求更高的大規(guī)模路徑誘導(dǎo)任務(wù)。
