航路規劃的試飛評估技術初步研究
2016-07-06 05:54:00李太平袁大天中國飛行試驗研究院陜西西安710089
電子測試 2016年12期
關鍵詞:層次分析法
李太平,陳 艷,袁大天(中國飛行試驗研究院,陜西西安,710089)
?
航路規劃的試飛評估技術初步研究
李太平,陳 艷,袁大天
(中國飛行試驗研究院,陜西西安,710089)
摘要:本文簡單介紹了航路規劃及其相關技術,并以A*算法仿真為例對航路規劃算法的一般步驟進行說明。針對航路規劃的試飛進行了初步分析,并建立了以層次分析法為評估手段的指標評價體系,對試飛及評估技術有一定的輔助作用。
關鍵詞:航路規劃;A*算法;層次分析法
0 引言
飛行器航路規劃是指根據已知的敵情和地形信息,從出發點到目標點,尋求一條滿足飛行器飛行生存概率最大、完成任務最佳、綜合指標最優的飛行路線。飛行航路規劃的約束條件眾多,例如,任務戰術約束、威脅約束、飛行器性能約束等。目前航路規劃技術發展迅速,規劃算法多種多樣,并且在理論上已經日趨成熟,但航路規劃的相關試飛評估技術才剛剛起步。
1 航路規劃技術簡介
航路規劃的關鍵技術包括環境模型的建立和規劃算法的設計和選取。
對收集到的威脅區域,目標區域信息和自身約束條件等建立環境數學模型,即將實際求解最優航路的物理問題轉化為多約束條件下,求極值的數學問題。按照環境模型約束來源的不同,將其劃分為以下幾類:
任務戰術約束:任務完成時間,目標飛點,攻擊方位角,初始航向;
威脅約束:雷達發現概率,導彈命中飛行器撞地概率,最小離地高度;
飛行器性能約束:最小(大)平飛航程,最大飛行高度,最大爬升角,最大航角,最大縱向曲率,最大過載。
規劃算法的設計和選取,實際上是選取合適的算法將抽象出來的數學問題求解最優航路。
規劃算法按照環境模型建立方式可以將航路規劃分為基于圖形(graph-based)和基于柵格(grid-based)兩種建模方法。基于圖形的方法首先根據一定規則將環境表示成由可飛航線和節點構成的網絡圖,然后根據特定的評價函數以及約束條件在圖中進行搜索,得到最優航路。基于柵格法的航路規劃,則是將可飛區域分解為一些簡單的單元格,判斷這些單元格是否連通,即路徑是否連通,通過對這些單元格賦予一定代價值,根據代價值采用某種算法找到一條最優路徑。
根據搜索航路算法不同,可以把規劃算法分為遺傳算法,Dijkstra法,蟻群算法,A*算法,人工勢場法。
本文中以A*算法為例,簡述航路規劃算法過程。
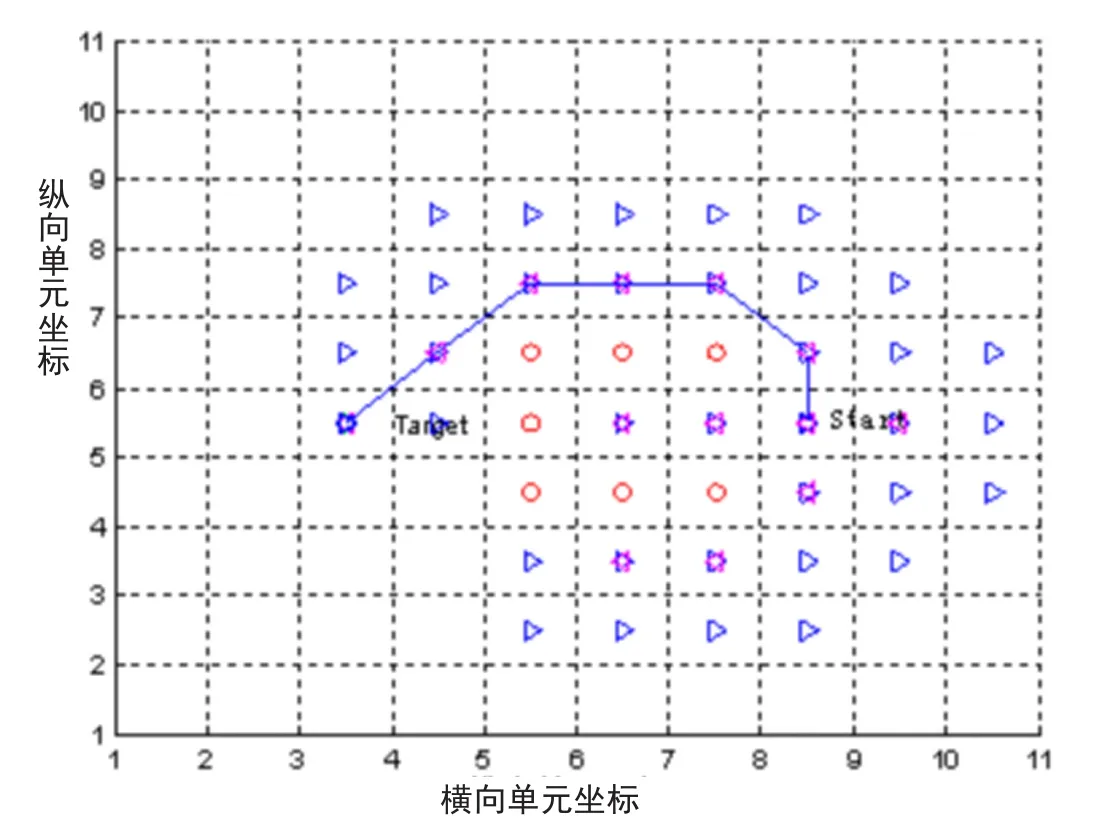
圖1 簡單柵格仿真效果
2 基于A*算法的航路規劃仿真
A*算法是人工智能中的一種啟發式搜索算法,它通過定義的代價函數來評估代價大小進而確定最優路徑。代價函數為:

其中: n表示待擴展的節點。g(n)表示從起始點到當前點的代價;h( n)表示從當前點n到目標點的估計代價,稱之為啟發函數。f(n)表示從起始點經過節點n 到達目標點的最小代價路徑的估計值。A*算法就是每次選擇候選節點中f 值最小的節點進行擴展。
進行航路規劃時首先對起點、終點、威脅源進行初始化,建立評價函數計算代價f,從起點向周圍逐漸遍歷尋找代價f最小的節點,遍歷至終點時遍歷結束。
圖1中預設起點(8,6)和終點(3,5)以及障礙物列表為(5,4)、(5,5)、(5,6)、(6,4)、(6,6)、(7,4)、(7,6),在Matlab仿真平臺下對上述簡單柵格進行A*算法計算,遍歷過程詳見圖1。
實際航路規劃通常在數字地圖上進行,需首先對地圖進行柵格劃分(起點、終點、威脅源均轉化為柵格),將數字地圖模型轉化為基于柵格數學模型,圖2為在數字地圖上進行A*算法航路規劃的結果。

圖2 數字地圖下航路規劃結果
3 試飛及評估方法研究
航路規劃視其用途側重不同,采用不同的試飛方法。在檢查航路規劃試飛功能時,首先應進行場景設定。如航路規劃側重于低空突防任務,在進行航路規劃試飛時,主要檢查低空數字地圖和地形回避功能,預先設定敵方防御系統場景(或通過電子偵察設備獲得敵情信息),選擇能夠進行地形規避的地形,檢查數字地圖的地形信息輔助功能及航路規劃功能。航路規劃用于規避威脅環境,設定山地和高地等起伏地形,人為布設地面雷達等威脅源,模擬產生惡劣氣象條件威脅,檢查其在威脅環境下的航路規劃功能。
設定場景后,應首先對其進行航路預演,預演應結合相應輔助軟件檢查航路是否考慮飛行器的物理限制,預演成功后進行試飛檢查其規劃功能。
航路規劃功能評估可以采用層次分析法進行評估,評估時主要考慮航路的隱藏性、物理可飛性、戰術任務要求、規劃最優性/實時性四個指標。航路隱蔽性指降低被敵方預警雷達和截獲雷達探測到的概率,提高生存能力;物理可飛性是指規劃時必需考慮飛行器的機動性能限制,否則飛行器將不可能按生成的行跡進行飛行;戰術任務需求是指特定任務的完成情況;規劃最優性/實時性是指航路規劃要適應戰場環境的環境信息變化和任務的不確定性。
試飛后由飛行員對相關指標進行評分,由專家對指標進行評分計算出各指標權重,將飛行員評分按照權重進行加權計算即可得航路規劃的評估結果。
4 結束語
本文簡單介紹了航路規劃的算法,并以A*算法仿真為例對航路規劃算法的一般步驟進行說明,對航路規劃的試飛評估進行了初步研究。現今航路規劃算法相關理論研究技術發展迅速,但成熟應用于飛行器的較少,針對航路規劃的試飛和評估技術才剛剛起步,仍需進行大量工作促進航路規劃技術的推廣應用。
參考文獻
[1]熊丹君,蔡滿意,劉宇坤,張沖。多約束條件下飛行器航路規劃[J].彈箭與制導學報,2009,29(2):289-292
[2]胡木,李春濤。無人機在線航路規劃技術研究及其工程實現[J]. 四川兵工學 報,2010,31(3):14-17
[3]穆中林,魯藝,任波,張斌。基于改進A*算法的無人機航路規劃方法研究[J]. 彈 箭與制導學報,2007,27(1):297-300
[4]彭漢國,馬良,趙陽揚。編隊作戰中艦載預警直升機任務規劃設計[J]. 四川兵工 學報,2014,35(5):14-17
Preliminary study on flight test evaluation technology of route planning
Li Taiping,Chen Yan,Yuan Datian
(Chinese Flight Test Establishment,Xi’an,China)
Abstract:This paper briefly introduces the route planning and its related technologies, and takes the A* algorithm simulation as an example to illustrate the general steps of the route planning algorithm. In order to make a preliminary analysis on the flight test of route planning, an index evaluation system based on analytic hierarchy process is established.
Keywords:route planning; A* algorithm; analytic hierarchy process
作者簡介
李太平(1982-),男,湖北宜昌人,碩士生,主要從事綜合航電系統試飛技術研究工作。
猜你喜歡
價值工程(2016年31期)2016-12-03 23:13:03
中國市場(2016年41期)2016-11-28 05:25:17
中國市場(2016年40期)2016-11-28 03:26:35
現代經濟信息(2016年25期)2016-11-24 08:26:52
中小企業管理與科技·下旬刊(2016年11期)2016-11-18 08:42:46
大學教育(2016年11期)2016-11-16 20:27:55
價值工程(2016年29期)2016-11-14 01:02:43
企業技術開發·中旬刊(2016年10期)2016-11-12 16:51:06
現代經濟信息(2016年19期)2016-10-20 20:58:28
中國市場(2016年35期)2016-10-19 02:03:21
