K-GM(1,1)模型在巖體變形監(jiān)測(cè)中的應(yīng)用
2016-07-25 11:10:22馬符訊席瑞杰
測(cè)繪工程 2016年8期
馬符訊,席瑞杰,徐 南
(1.武漢大學(xué) 衛(wèi)星導(dǎo)航定位技術(shù)研究中心,湖北 武漢 430079;2.武漢大學(xué) 測(cè)繪學(xué)院,湖北 武漢 430079;3.清華大學(xué) 地球系統(tǒng)科學(xué)研究中心,北京 100084)
?
K-GM(1,1)模型在巖體變形監(jiān)測(cè)中的應(yīng)用
馬符訊1,席瑞杰2,徐南3
(1.武漢大學(xué) 衛(wèi)星導(dǎo)航定位技術(shù)研究中心,湖北 武漢 430079;2.武漢大學(xué) 測(cè)繪學(xué)院,湖北 武漢 430079;3.清華大學(xué) 地球系統(tǒng)科學(xué)研究中心,北京 100084)
摘要:傳統(tǒng)GM(1,1)模型存在著長(zhǎng)期預(yù)測(cè)效果差、模型精度不高等問題,卡爾曼濾波能夠排除建模過(guò)程中隨機(jī)干擾因素,濾波值能夠反映更真實(shí)的數(shù)據(jù)情況。為了能更好地提高變形監(jiān)測(cè)的預(yù)測(cè)精度,基于傳統(tǒng)GM(1,1)模型和卡爾曼濾波,提出K-GM(1,1)模型,利用該模型對(duì)巖體變形監(jiān)測(cè)數(shù)據(jù)進(jìn)行建模預(yù)測(cè),并與傳統(tǒng)GM(1,1)模型預(yù)測(cè)結(jié)果進(jìn)行對(duì)比分析,結(jié)果表明,K-GM(1,1)模型具有較高的預(yù)測(cè)精度,可作為變形監(jiān)測(cè)的一種新方法。
關(guān)鍵詞:卡爾曼濾波;GM(1,1)模型;預(yù)測(cè);變形監(jiān)測(cè)
1基于卡爾曼濾波的灰色模型
1.1傳統(tǒng)GM(1,1)模型
設(shè)某系統(tǒng)原始觀測(cè)序列:X(0)={x(0)(1),x(0)(2),x(0)(3),…,x(0)(n)},X(0)一次累加生成X(1)序列:X(1)={x(1)(1),x(1)(2),x(1)(3),…,x(1)(n)},其中
(1)
當(dāng)X(1)={x(1)(1),x(1)(2),x(1)(3),…,x(1)(n)}是時(shí)間t的連續(xù)可微函數(shù)并滿足一階微分方程:
(2)
式中:參數(shù)a為發(fā)展系數(shù),表征系統(tǒng)的發(fā)展走勢(shì);參數(shù)b為灰色作用量,表征數(shù)據(jù)變化的關(guān)系。
則GM(1,1)的時(shí)間響應(yīng)函數(shù)
(3)
最后通過(guò)累減得到預(yù)測(cè)值:
(4)
1.2K-GM(1,1)模型
卡爾曼濾波是一種通過(guò)對(duì)被提取信號(hào)有關(guān)的觀測(cè)量的算法估計(jì)得出所需信號(hào)的濾波方法。離散系統(tǒng)的卡爾曼濾波的動(dòng)態(tài)方程和量測(cè)方程
(5)
(6)
式中:xk,ωk-1分別為k時(shí)刻的狀態(tài)變量和動(dòng)態(tài)噪聲;φk,k-1為k-1時(shí)刻到k時(shí)刻的狀態(tài)轉(zhuǎn)移矩陣;zk,Hk,vk分別為k時(shí)刻的觀測(cè)向量、量測(cè)方程系數(shù)矩陣和量測(cè)噪聲。
離散線性系統(tǒng)的狀態(tài)估計(jì)問題本質(zhì)上就是根據(jù)觀測(cè)向量z1,z2,…,zk的數(shù)學(xué)模型,求得第tj時(shí)刻的狀態(tài)向量xk最優(yōu)估值的問題,一般分為3種情況:

卡爾曼濾波過(guò)程的求解結(jié)果為
(7)
(8)
其中
Jk=
變形監(jiān)測(cè)工程中,通常影響因素較多且相對(duì)復(fù)
雜,變形時(shí)間序列中不僅存在白噪聲,可能還存在著有色噪聲,從而產(chǎn)生建模誤差。本文構(gòu)建的K-GM(1,1)模型,設(shè)定卡爾曼濾波過(guò)程的狀態(tài)參數(shù)為監(jiān)測(cè)點(diǎn)的位移量及其位移速度,設(shè)定動(dòng)態(tài)噪聲為監(jiān)測(cè)點(diǎn)的位移加速度,故卡爾曼濾波動(dòng)態(tài)方程為
式中:xk,vk,ak分別為監(jiān)測(cè)點(diǎn)的位移量,位移速度和加速度;ωk-1為動(dòng)態(tài)噪聲;tk-1表示時(shí)間。K-GM(1,1)模型處理流程如圖1所示。
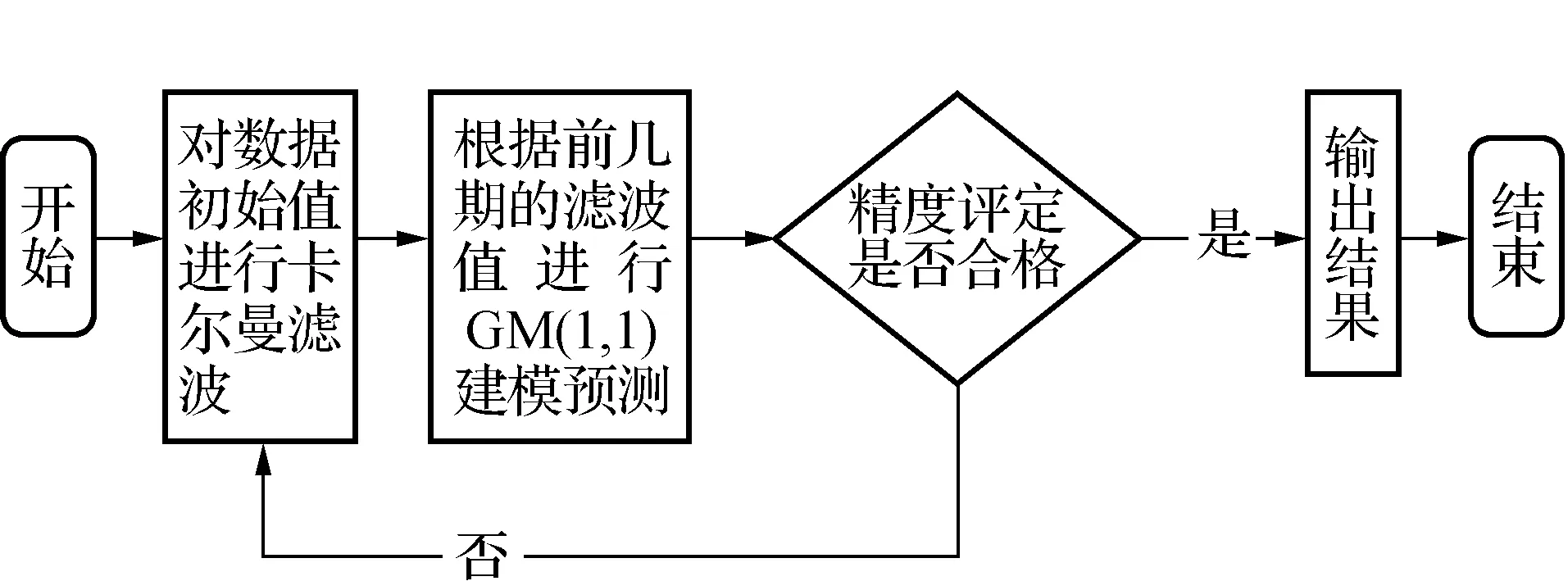
圖1 K-GM(1,1)模型處理流程
2工程實(shí)例
為保證隧道建成后洞口巖體的安全性,于2014年開始對(duì)其進(jìn)行健康監(jiān)測(cè),監(jiān)測(cè)周期為1個(gè)月,同時(shí)為驗(yàn)證K-GM(1,1)模型的有效性,本文以某隧道出口洞頂巖體監(jiān)測(cè)點(diǎn)2014年前11期的沉降監(jiān)測(cè)值為例,如表1 所示,其中前5期的實(shí)測(cè)值為原始序列,試驗(yàn)過(guò)程為首先利用卡爾曼濾波對(duì)其建模數(shù)據(jù)進(jìn)行處理,剔除隨機(jī)擾動(dòng)誤差的影響,再運(yùn)用灰色理論對(duì)濾波值進(jìn)行建模,并預(yù)測(cè)后6期的變形發(fā)展趨勢(shì),最后計(jì)算實(shí)測(cè)值與預(yù)測(cè)結(jié)果的殘差,驗(yàn)證模型的可靠性。

表1 某巖體監(jiān)測(cè)點(diǎn)2014年前11期的沉降監(jiān)測(cè)值
2.1傳統(tǒng)GM(1,1)模型預(yù)測(cè)
首先選取原始觀測(cè)序列的前5期進(jìn)行建模,再利用傳統(tǒng)的GM(1,1)模型對(duì)后6期數(shù)據(jù)進(jìn)行預(yù)測(cè),通過(guò)計(jì)算求得原始觀測(cè)值和預(yù)測(cè)值的殘差,對(duì)預(yù)測(cè)結(jié)果進(jìn)行評(píng)估。傳統(tǒng)GM(1,1)模型預(yù)測(cè)結(jié)果如表2所示。
由表2可以看出,傳統(tǒng)的GM(1,1)模型預(yù)測(cè)精度總體良好,但存在隨預(yù)測(cè)時(shí)間增加,預(yù)測(cè)精度下降的情況,傳統(tǒng)的GM(1,1)模型在長(zhǎng)期預(yù)測(cè)方面模型的預(yù)測(cè)精度不能得到很好的保證,不能反映巖體最真實(shí)的變形規(guī)律和變形趨勢(shì)。
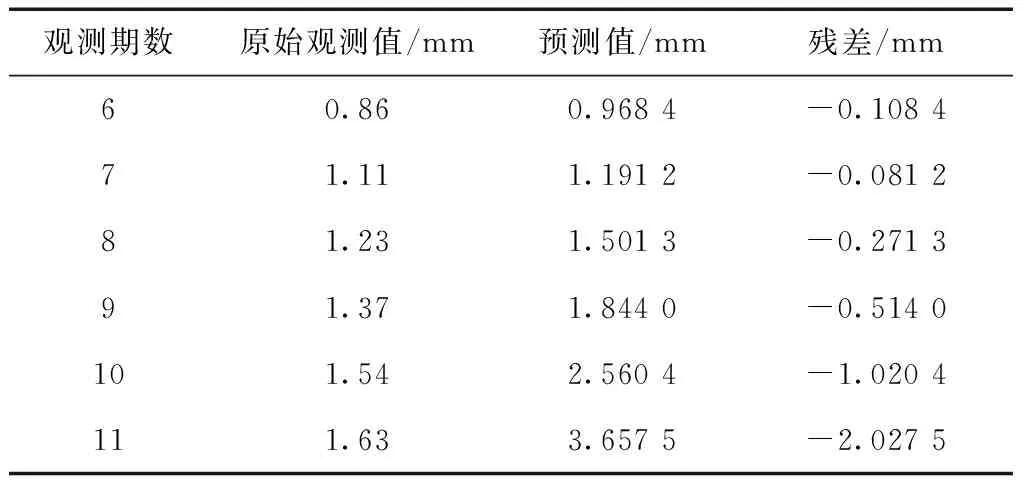
表2 傳統(tǒng)GM(1,1)模型預(yù)測(cè)
2.2K-GM(1,1)模型預(yù)測(cè)

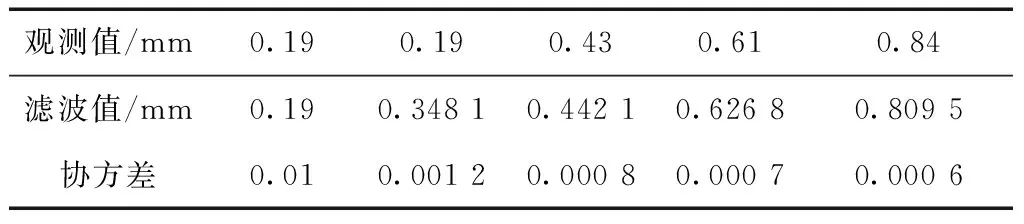
表3 原始序列的卡爾曼濾波結(jié)果
由表3可以看出,濾波值由第二期開始收斂,協(xié)方差基本也穩(wěn)定在0.001以內(nèi),同時(shí)其變化趨勢(shì)為越來(lái)越小,逐漸趨近于0。在此基礎(chǔ)上,本文再利用傳統(tǒng)GM(1,1)模型對(duì)前5期的卡爾曼濾波值進(jìn)行建模預(yù)測(cè),后6期的預(yù)測(cè)結(jié)果如表4所示。
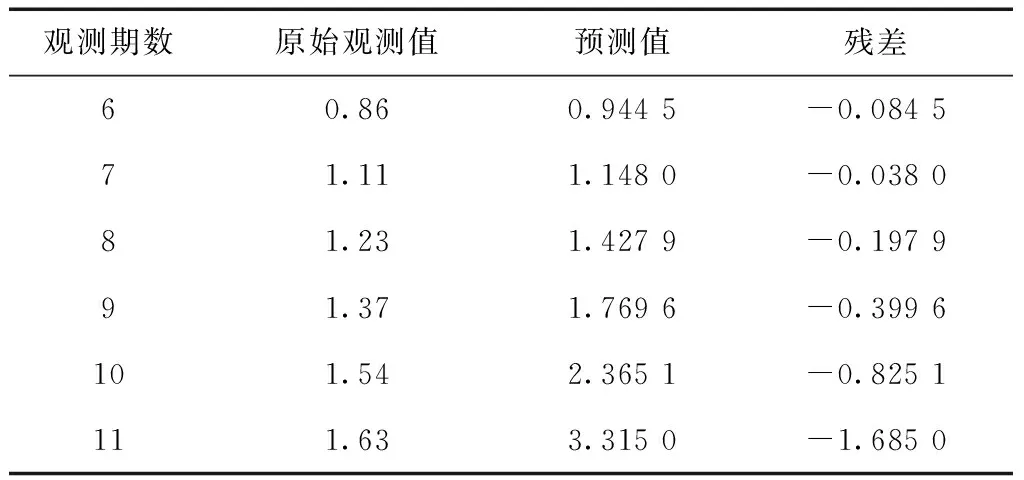
表4 K-GM(1,1)模型預(yù)測(cè) mm
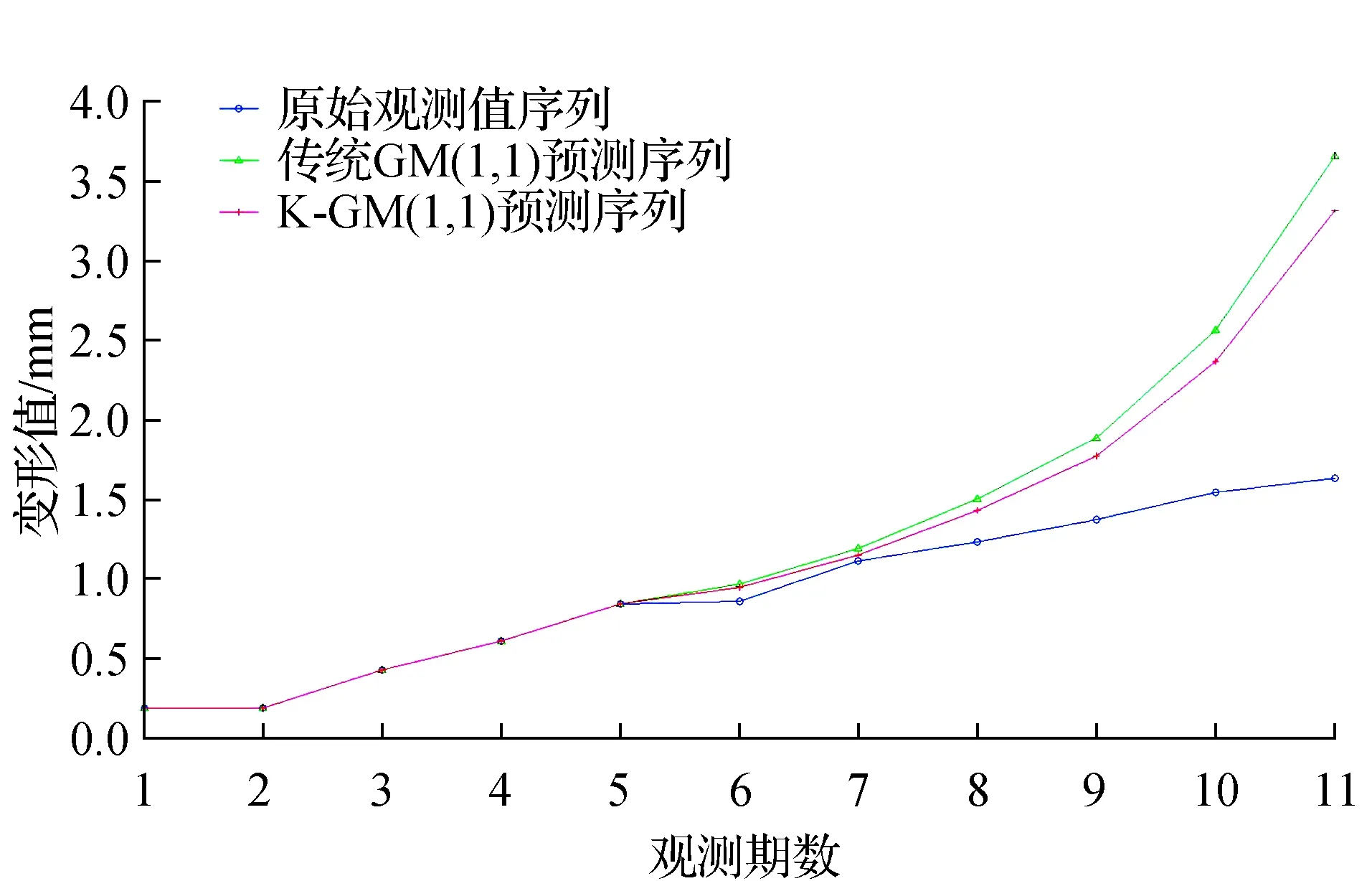
圖2 K-GM(1,1)模型與傳統(tǒng)GM(1,1)模型預(yù)測(cè)值比較
圖2所示為傳統(tǒng)GM(1,1)模型與K-GM(1,1)模型預(yù)測(cè)值對(duì)比結(jié)果,從圖2中可以看出,K-GM(1,1)模型預(yù)測(cè)精度總體良好,優(yōu)于傳統(tǒng)GM(1,1)模型的預(yù)測(cè)精度,但隨著預(yù)測(cè)時(shí)間的增加,該模型也呈現(xiàn)了預(yù)測(cè)精度下降的趨勢(shì),這與GM(1,1)的模型特點(diǎn)有關(guān),卡爾曼濾波的作用只是剔除建模數(shù)據(jù)中的干擾因素,并不能排除預(yù)測(cè)過(guò)程中的誤差源。K-GM(1,1)模型的預(yù)測(cè)值相比傳統(tǒng)GM(1,1)模型更接近真實(shí)的變形值。因此,經(jīng)過(guò)改進(jìn)K-GM(1,1)模型可以更好的反映巖體的變形規(guī)律和變形趨勢(shì)。
3結(jié)論
本文利用卡爾曼濾波和傳統(tǒng)GM(1,1)模型構(gòu)造出K-GM(1,1)模型,利用該模型對(duì)巖體變形數(shù)據(jù)進(jìn)行分析預(yù)測(cè),并與傳統(tǒng)GM(1,1)模型的預(yù)測(cè)結(jié)果進(jìn)行對(duì)比分析,結(jié)論:K-GM(1,1)模型的預(yù)測(cè)精度優(yōu)于傳統(tǒng)的GM(1,1)模型,但依然存在著長(zhǎng)期預(yù)測(cè)精度低的問題,這與傳統(tǒng)GM(1,1)的模型原理有關(guān),今后可引入自適應(yīng)動(dòng)態(tài)調(diào)節(jié)因子,建立動(dòng)態(tài)GM(1,1)模型解決該問題。總之,本文提出的K-GM(1,1)模型程序?qū)崿F(xiàn)簡(jiǎn)單,預(yù)測(cè)精度高,具有更好的預(yù)測(cè)效果,故K-GM(1,1)模型在巖體變形預(yù)測(cè)中具有較高的應(yīng)用價(jià)值。
參考文獻(xiàn):
[1]鄧聚龍.灰色系統(tǒng)基本方法[M].湖北:華中工學(xué)院出版社,1987.
[2]李日云,王利,張雙成.灰色預(yù)測(cè)模型在高層建筑物沉降預(yù)測(cè)中的應(yīng)用研究[J].地球科學(xué)與環(huán)境學(xué)報(bào),2005,27(1):23-26.
[3]甘月云,陳星,付軍,等.基于灰色預(yù)測(cè)GM(1,1)模型的城鎮(zhèn)生活需水量預(yù)測(cè)[J].水電能源科學(xué),2012(9):40-42.
[4]劉思峰,黨耀國(guó),方志耕,等.灰色系統(tǒng)理論及其應(yīng)用[M].北京:科學(xué)出版社,2010.
[5]喜文飛,史正濤.基于卡爾曼濾波的動(dòng)態(tài)灰色理論模型研究[J].測(cè)繪工程,2014,23(3):24-27.
[6]吳彥,張鐸強(qiáng),徐南.反向灰色模型的初值優(yōu)化在道路沉降中應(yīng)用[J].測(cè)繪工程,2014,23(12):60-62.
[7]INCE C D,SAHIN M.Real-time deformation monitoring with GPS and Kalman Filter[J].Earth Planets and Space,2000,52(10):837-840.
[8]王琦,孫華,李偉華,等.卡爾曼濾波在變形監(jiān)測(cè)數(shù)據(jù)處理中的應(yīng)用[J].工程地球物理學(xué)報(bào),2009,6(5):658-661.
[9]文鴻雁,周呂,韓亞坤,等.基于卡爾曼濾波的GM(1,1)模型在高鐵隧道沉降變形分析中的應(yīng)用[J].大地測(cè)量與地球動(dòng)力學(xué),2014,34(1):88-91.
[10] 任遠(yuǎn)軍,李龍,石寧,等.改進(jìn)的 GM(1,1) 模型在大壩變形預(yù)測(cè)中的應(yīng)用[J].測(cè)繪工程,2015,24(6):61-64.
[11] 姜?jiǎng)?楊志強(qiáng),張貴鋼.卡爾曼濾波算法的灰色理論模型在變形監(jiān)測(cè)中的應(yīng)用[J].測(cè)繪科學(xué),2011,36(4):19-21.
[責(zé)任編輯:李銘娜]
DOI:10.19349/j.cnki.issn1006-7949.2016.08.010
收稿日期:2015-05-07;修回日期:2015-06-25
基金項(xiàng)目:國(guó)家自然科學(xué)基金資助項(xiàng)目(41374033)
作者簡(jiǎn)介:馬符訊(1992-),男,碩士研究生.
中圖分類號(hào):F291.1
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1006-7949(2016)08-0042-03
Application of K-GM(1,1)model to the deformation monitoring of rocks
MA Fuxun1,XI Ruijie2,XU Nan3
(1.Research Center of GNSS,Wuhan University,Wuhan 430079,China;2.School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China;3.Center of Earth System Sciences,Tsinghua University,Beijing 100084,China)
Abstract:There are some problems in the tradition GM(1,1) forecast models such as the bad effect in the long term prediction and the low accuracy and so on.Therefore,Kalman filter method has the advantage of eliminating random interference factors in the process of modeling,and the filtered data can reflect the real situation of the project.In order to improve the prediction accuracy of deformation monitoring,this paper proposes to use the K-GM (1,1) model,based on the GM (1,1) model and Kalman filter,and to analyze the rock mass deformation monitoring data.The results indicate that comparing with the GM(1,1) model,the K-GM(1,1) model can achieve a higher prediction accuracy,which can be used as a new method for deformation monitoring.
Key words:Kalman filtering;GM(1,1);forecast;deformation monitoring
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
