水下維修載人潛器運動仿真
2016-10-19 10:58:38朱曉環張定國韓端鋒彭小佳
船舶標準化工程師 2016年5期
關鍵詞:系統
朱曉環,劉 峰,張定國,韓端鋒,彭小佳
(1.海洋石油工程股份有限公司,天津 300456;2.哈爾濱工程大學,哈爾濱 150001)
水下維修載人潛器運動仿真
朱曉環1,劉 峰2,張定國1,韓端鋒2,彭小佳1
(1.海洋石油工程股份有限公司,天津 300456;2.哈爾濱工程大學,哈爾濱 150001)
操縱性是載人潛器的重要性能,通過載人潛器的運動仿真可以對于載人潛器的操縱性進行評估,本文以水下維修載人潛器為研究對象,建立了載人潛器空間六自由空間運動數學模型的基礎上,利用Matlab的S-function建立了基于Simulink的載人潛器控件運動仿真系統,進行了載人潛器運動仿真,為運動控制系統設計提供了重要依據。
水下維修載人潛器;六自由度;數學模型;運動仿真
0 引言
載人潛器可以攜帶海洋科學家、工程技術人員進入海洋深處,是人類實現開發深海、利用海洋的一項重要技術手段[1]。水下維修載人潛器是載人潛器的一種,主要應用于水下生產設施的維修、事故處理、日常巡檢等,是水下生產設施安全生產的重要保證。水下維修載人潛器在水下執行作業任務時要求其能夠對于復雜海底地形進行靈活的機動、正確到位等,這些均與載人潛器的操縱性能密切相關[2]。
載人潛器在水中運動時,是具有6個自由度的運動剛體,是一個強耦合的非線性系統,同時復雜的海洋環境導致獲得水下潛器的精確模型非常困難[3]。計算機仿真在計算機上建立仿真模型,模仿實際系統的運行狀態及其隨時間的變化過程。通過對仿真試驗過程的觀察和統計,得到被仿真系統的仿真輸出參數和基本特性,以此來估計和推斷實際系統的真實參數和真實性能,為一些復雜系統創造了計算機試驗環境,使系統的性能和長期的動態特性能在極短的時間內由計算機得到全面的實現[4]。載人潛器運動仿真的研究需要解決的問題是針對載人潛器操縱性能進行預報,運動仿真通過計算機數值模擬的方法研究載人潛器的空間運動特性,是一種科學有效、省時、省力的研究方法[5,6]。隨著載人潛器的發展,對其機動性、控制品質及導引精度的要求也就變得更加嚴格。簡化模型和以往所采用的分析方法已遠不能滿足載人潛器研究、設計的需要。Matlab仿真工具箱Simulink的出現為解決上述問題提供了便利的仿真環境[7]。
首先針對水下維修載人潛器的空間運動方程進行研究,建立了基于Matlab/Simulink的水下維修載人潛器運動仿真系統,利用該仿真系統對于水下維修載人潛器幾個典型運動狀態進行了仿真,得到了相關結論,為水下維修載人潛器的控制系統設計提供了理論依據。
1 載人潛器空間運動方程
為了描述水下潛器的運動以及建立仿真系統,必須首先建立適合描述水下潛器運動的坐標系。根據國際水池會議(ITTC)推薦的和造船與輪機工程學會(SNAME)術語公報的體系,坐標系是下列兩種右手系:一個是固定坐標系E-ξηζ 固定于地球,稱為“定系”;另一個是運動坐標系G-xyz,固定于潛器,隨潛器一起運動,稱為“動系”,具體如圖1所示。

圖1 固定坐標系和運動坐標系
圖1中,定系E-ξηζ:原點E可選地球上某一點,如海面或海中任一點,Eξ的軸位于水平面,并以潛器的主航向為正向;Eη軸位于Eξ軸所在的水平面,按右手法則將Eξ軸順時針旋轉90度即是;Eζ位于ξEη坐標平面,指向地心為正,動系G-xyz:原點G選在潛器的任一點,Gx軸、Gy軸和Gz軸,分別經過G點的水線面、橫剖面和縱中剖面的交線,正向按右手系的規定,即Gx軸指向艇首為正、Gy軸向右為正、Gz軸向下為正,Gx軸、Gy軸和Gz是潛器的慣性主軸。
根據剛體運動學理論,載人潛器空間六自由度運動的方程為[8,9]

式中,m為潛器質量;Ixx、Iyy、Izz為潛器質量m對Ox、Oy、Oz、軸的轉動慣量;u、v、w、p、q、r六個自由度的(角)速度;六個自由度的(角)加速度;X、Y、Z、K、M、N表示作用在潛器上的的作用力(矩)。

右端非慣性水動力可以表示為:

2 載人潛器受力分析
2.1 重力和浮力
作用在載人潛器上的重力包括P全排水量P0和各種載荷的變化ΔP。P0的作用點為重心G(XG,YG,ZG),ΔP指相對于P0的增減,每一項變化都有一個重心Gj。
作用在載人潛器上的浮力B包括全容積浮力B0和浮力的各種變化ΔB,浮力的作用點為浮心C(XC,YC,ZC),ΔB指相對于B0的增減,則艇體坐標系下的重力與浮力在各坐標軸上作用的分量為:

2.2 推進器推力
目標載人潛器推進系統采用導管推進器,在潛器中部兩側布置垂推兩部,垂推可旋轉至水平位置兼作主推功能;主推兩部布置于尾部,在艏艉各布置一部推進器以實現載人潛器的轉艏運動,必要情況下可進行橫移運動。
圖2中,lMTy為主推距中線橫向距離;lVTy為垂推距中線橫向距離;lALTx為尾側推距中心縱向距離;lFLTx為首側推距中心縱向距離;lVTx為垂推距中心縱向距離;lALTz為尾側推距中心垂向距離;lFLTz為首側推距中心垂向距離。
對于導管推進器而言,可將推進器推力(矩)表達成航速V,和推進器控制電壓ut函數的形式[10]。

將推進器敞水試驗測得的電壓和航速的推力(矩)擬合為曲線,就可通過曲線插值的得到不同航速和控制電壓下的推力(矩),以主推為例,敞水條件下,水流速度分別為0 m/s、0.5 m/s、1 m/s、1.5 m/s、1.8 m/s,控制電壓取值范圍為-5 V~5 V,圖3為主推敞水試驗曲線。
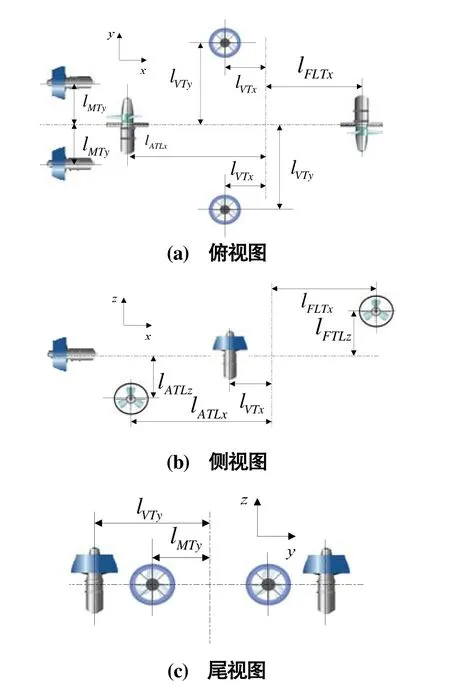
圖2 推進器布局

圖3 主推敞水試驗曲線
2.3環境干擾力
載人潛器的運動要受到環境擾動的影響,包括風、波浪和海流等,其中對潛器的運動影響最大的是波浪和海流。根據線性波浪理論,當潛器的航行深度達到一定深度范圍后,就可以認為其已經不受到波浪力的作用,此時,環境干擾力只考慮海流因素。
載人潛器在海流中的艇體水動力是載人潛器相對于海流的相對速度ur、vr、wr和相對加速度的函數,相對流速通過式(6)求得:

式中,Uc為流速;αc為流向角;ψ為艏向角。
對時間微分后可得到相對加速度為

將得到的相對加速度代到六自由度運動方程后,就可得到所求的仿真系統運動模型。
3 Simulink仿真模型的構建
3.1 模型初始化
在首次仿真循環開始之前,Simulink會初始化S-function,在該階段期間,Simulink會執行以下任務:初始化SimStruct,這是一個仿真數據結構,包含了關于S-function的信息;設置輸入和輸出端口的數量和寬度;設置塊的采樣時間w分配存貯區間和參數sizes的陣列。
根據載人潛器運動數學模型,共設置12個連續狀態量及輸出量:u、v、w、p、q、r、ξ、η、ζ、?、ψ、θ;設置20個輸入量:u0、v0、w0、p0、q0、r0、ξ0、η0、ζ0、?0、ψ0、θ0、Uc、αc、六個推進器控制電壓。
在S-function的初始化子程序中為了給Simulink提供輸入、輸出、狀態的數量,以及其它特性信息,必須在mdlInitializeSizes的開頭調用simsizes,需要進行如下設置:
function[sys,x0,str,ts]=mdlInitializeSizes(V0)
sizes=simsizes;
sizes.NumContStates=12;%連續狀態個數。
sizes.NumDiscStates=0;運動模型中無離散狀態變量。
sizes.NumOutputs=12;輸出個數。
sizes.NumInputs =20;輸入個數。
sizes.DirFeedthrough=0;同一時刻的輸入值時為1;否則為0。
sizes.NumSampleTimes=1;采樣時間的個數,每個系統至少有一個采樣時間。
sys=simsizes(sizes);%返回以上結構參數。
str=[ ];%保留以后使用。
ts=[0 0];%對連續系統,采樣時間為0。
3.2 計算狀態微分
Simulink模型以flag=1的語句調用S-Function時,將轉至子函數function sys=mdlDerivatives(t,x,u)計算狀態的微分。計算狀態微分子函數的簡略設計步驟如下:
1)給參數賦值:包括載人潛器六自由度運動方程中運用到的所有的特征參數、海水密度、無因次水動力系數等;
2)根據變換得到的載人潛器的六個自由度運動方程的矩陣形式,求出所需的系數矩陣E;
3)寫出輸入矩陣u,即各推進器所產生的力以及力矩;
4)求得載人潛器在各自由度上除慣性水動力以外的合力;
5)列出載人潛器運動方程的矩陣形式,進而求出連續狀態變量的微分值;
6)列出計算位置、姿態六個連續變量的輔助方程式;
7)將計算的各個微分組合成向量,賦予返回變量sys,作為子函數的輸出,該輸出即為模型狀態的微分。
3.3 模型輸出
當flag=3時,S-Function調用子函數function sys=mdlOutputs(t,x,u)計算模型的輸出。因已將模型的狀態向量x設計為模型的輸出,因此只要在子函數mdlOutputs中將狀態向量x賦予返回變量sys。
3.4 計算下一個采樣時間
當flag=4時,S-Function調用function sys=mdlGetTimeOfNextVarHit(t,x,u)子函數,將下一次采樣時刻的值則賦給返回變量sys。只有在采樣時刻為可變時,S函數才會以flag=4的條件被調用。
3.5 仿真終止
當仿真以某種原因結束時,S函數將以flag=9被調用S函數此時需要完成一些終止仿真的任務,這一步驟不需賦值給sys。
在完成以上步驟后,S-function編程結束,并以文件名HOV-motion.m存盤。
3.6 基于Simulink的載人潛器運動仿真系統
本文的載人潛器運動仿真系統采用Simulink進行構建,載人潛器運動仿真原理見圖4,圖4的仿真系統由三部分組成:
1)輸入模塊:載人潛器初始速度、初始位置、海流、推進器電壓(6部推進器);
2)運動計算模塊:利用已經編寫完成的S函數創建Simulink中的S-Function模塊,S-Function主要進行載人潛器空間運動方程的解算;
3)輸出模塊:進行載人潛器運動的實時模擬,可進行實時速度、實時位置的輸出與顯示。

圖4 載人潛器運動仿真原理
4 仿真系統的實現
為考核載人潛器的運動能力,本文將載人潛器仿真分為三種模式:
1)最大航行能力考核:左右主推控制電壓5 V;左右主推控制電壓5 V、左、右垂推控制電壓5 V;艏艉側推控制電壓5V;左右垂推控制電壓5 V,以上四種情況其他初始變量設置均為0;
2)水平面回轉能力考核:左右主推控制電壓5 V、艏艉側推控制電壓5 V;左右主推控制電壓5 V、艏艉側推控制電壓5 V、左右垂推控制電壓5 V,以上兩種情況其他初始變量設置均為0,兩種情況下在ψ=±10°情況下,側推就反轉,共運動5個周期;
3)空間回轉運動考核:θ=5°、左右主推控制電壓5 V、艏艉側推控制電壓5 V;θ=5°、左右主推控制電壓5 V、艏艉側推控制電壓5 V、左右垂推控制電壓5 V,以上兩種情況其他初始變量設置均為0,運動時間為1 500 s。三種仿真模式得到的仿真結果見圖5~圖7。
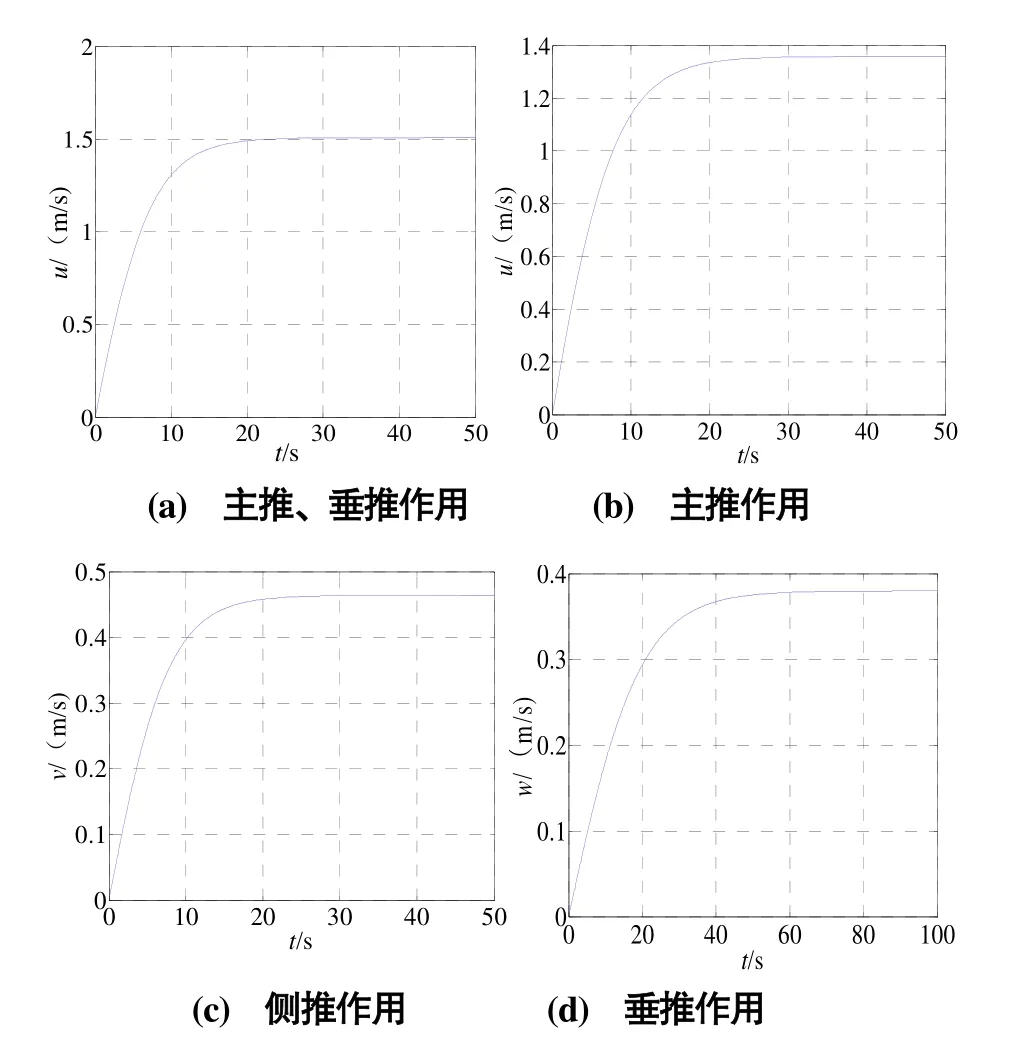
圖5 最大航行速度仿真
圖5可以看出,主推和垂推共同作用下載人潛器航速可達到1.51 m/s,主推單獨作用下載人潛器航速可達到1.36 m/s,側推作用下的載人潛器橫移最大速度為0.463 m/s,垂推作用下的載人潛器升沉最大速度為0.380 m/s。

圖6 Z形機動仿真
圖6可以看出,在主推和垂推共同作用下,載人潛器運動周期199.3 s、側向運動幅度為18.8 m、主方向前進距離308.2 m;在主推作用下,載人潛器運動周期162.6 s、側向運動幅度為11.85 m、主方向前進距離224.9 m。

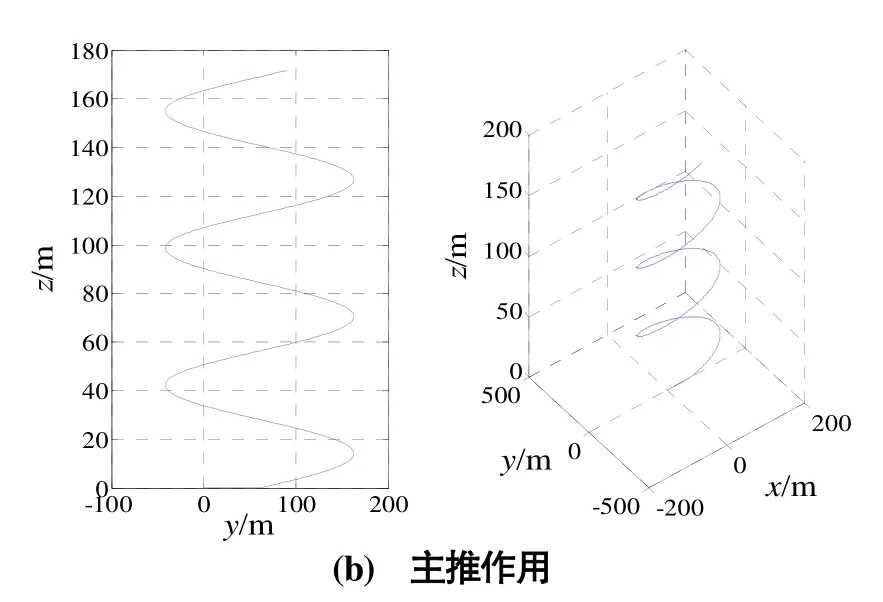
圖7 空間回轉運動仿真
圖7可以看出,在主推和垂推共同作用下,1 500 s內載人潛器垂向運動距離為190.6 m、回轉直徑280.0 m、每個周期垂向運動距離77.9 m;在主推作用下,1 500 s內載人潛器垂向運動距離為171.6 m、回轉直徑204.8 m、每個周期垂向運動距離55.4 m。
5 結論
本文針對水下維修載人潛器的運動仿真系統的研究,通過系列典型運動狀態的仿真,得到以下結論:
1)進退方向采用主推與垂推共同作用下的航速比主推單獨作用下的航速略大,由于載人潛器所攜帶的能源有限,為節約能源,在巡航速度建議采用主推完成進退方面的運動,緊急情況下可采用主推與垂推共同作用模式;
2)橫移速度和升沉速度都不是很大,水平運動時采用側推轉首,再利用主推作用完成橫向運動,以彌補橫移速度的不足;下潛狀態優先考慮采用重力式下潛模式,也可采用縱傾式航行;
3)轉首運動及空間運動時,為節約系統能源,優先考慮主推完成,特殊情況采用主推和垂推共同作用模式。
[1]湯國偉,邱中梁,王璇.深海載人潛水器壓載水箱注排水系統研究[J].液壓與氣動,2008(3):7-9.
[2]謝俊元.深海載人潛水器動力學建模研究及操縱模擬器研制[D].江南大學博士學位論文.2009.
[3]劉小峰.海洋探測機器人操縱性及運動仿真研究[D].哈爾濱工程大學碩士學位論文.2007.
[4]韓曉寶,高維杰,劉海強.船舶旋回運動的建模與仿真[J].中國水運.2007,8(5):22-24.
[5]A.Alan,B.Pritsker.Compilation of Definition of Simulation[J].Simulation Transactions of the Society for Modeling & Simulation International,1979,33(2):61-63.
[6]謝俊元.一種虛擬現實的深潛器運動仿真系統[J].船舶力學.2005,9(4):53-61.
[7]潘瑛,徐德民.自主式水下航行器空間運動矢量建模與仿真[J].系統仿真學報.2003,15(4):538-539.
[8]楊新平,徐鵬飛,胡震.深海機器人視景仿真系統研究[J].海洋工程.2012,30(1):137-144.
[9]謝俊元,馬嶺,胡震.載人潛器運動操縱模擬[J].中國造船.2006,47(2):62-69.
[10]王波.微小型水下機器人運動仿真研究[D].哈爾濱工程大學碩士學位論文.2008.
Motion Simulation of Underwater Repair HOV
Zhu Xiao-huan1,Liu Feng2,Zhang Ding-guo1,Han Duan-feng2,Peng Xiao-jia1
(1.Offshore Oil Engineering CO.,Ltd.,Tianjin 300456,China; 2.College of Shipbuilding Engineering,Haerbin Engineering University,Harbin 150001,China)
Maneuverability is an important property of HOV (Human Occupied Vehicle).The HOV motion simulation for underwater repair HOV can give assessment to maneuverability.Taking underwater repair HOV as a research object,based on establishing HOV space six free degree space motion mathematical model,the Matlab S-function is used to construct the control motion simulation system for HOV.The motion simulation is carried out,which provides important basis for the design of motion control system.
underwater repair HOV; six free degree; mathematical model; motion simulation
U661.4
A DOI:10.14141/j.31-1981.2016.05.005
大型油氣田及煤層氣開發項目27,子課題五“深水水下應急維修裝備與技術”,課題編號:2011ZX05027-005。
朱曉環(1967—),女,高級工程師,研究方向:船舶與海洋工程仿真。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
