一種基于機器學習算法的單目里程計研究
2016-11-22 09:34:40顧海艷陳穎潔丁堯
教育教學論壇 2016年43期
關鍵詞:卡爾曼濾波
顧海艷 陳穎潔 丁堯

摘要:視覺里程計(VO)通過軌跡推算,累加運動矢量,得出當前位置的相對定位方法,單目里程計僅使用單個相機作為圖像獲取載體,使獲得信息的要求更低,且能較精確地識別和定位特征點,實時性好,成本也少很多,因此具有更廣的應用前景。本課題采用SURF算法來同時檢測和匹配特征點,使用一種基于機器學習算法(SVM)自適應卡爾曼濾波器,減緩原本卡爾曼濾波器中會出現的精度低和發散狀況,起到優化單目里程計的系統準確度。
關鍵詞:單目;視覺里程計;SURF算法;卡爾曼濾波
中圖分類號:G642.0 ? ? 文獻標志碼:A ? ? 文章編號:1674-9324(2016)43-0257-03
移動機器人的自主定位導航是機器人運動的前提之一,隨著計算機技術和圖像處理技術的發展,利用機器視覺進行導航逐漸成為熱點之一[1]。視覺里程計(VO)通過軌跡推算,累加運動矢量,得出當前位置的相對定位,從而幫助機器人感知周圍環境和自由移動。對比雙目里程計,單目里程計僅使用單個相機作為圖像獲取載體,使獲得信息的要求更低,實時性好,成本也更少,因此具有更廣的應用前景[2]。本研究課題引入機器學習算法,對傳統單目視覺里程計進行改良,提出了一種新的解決方案,優化單目視覺里程計,對后期的工程應用有一定的實踐意義。
一、設計單目視覺里程計系統模型
單目視覺里程計模型設計分為:硬件設計和軟件設計。硬件設計就是安裝在機器上帶有調節機構的單個相機。軟件模型設計包括:圖像的采集和預處理、目標的選取特征與運動估計等模塊,其軟件設計工作流程如圖1所示:
圖1中,在采集到圖像后,要進行濾波、圖像矯正、標定參數等預處理,相機參數標定獲得的參數能將現實三維與相機二維圖像聯系起來,是單目里程計能否準確定位的關鍵[3],本課題采用張友正的棋盤標定法,較其他算法實現起來更簡單,準確度較高。
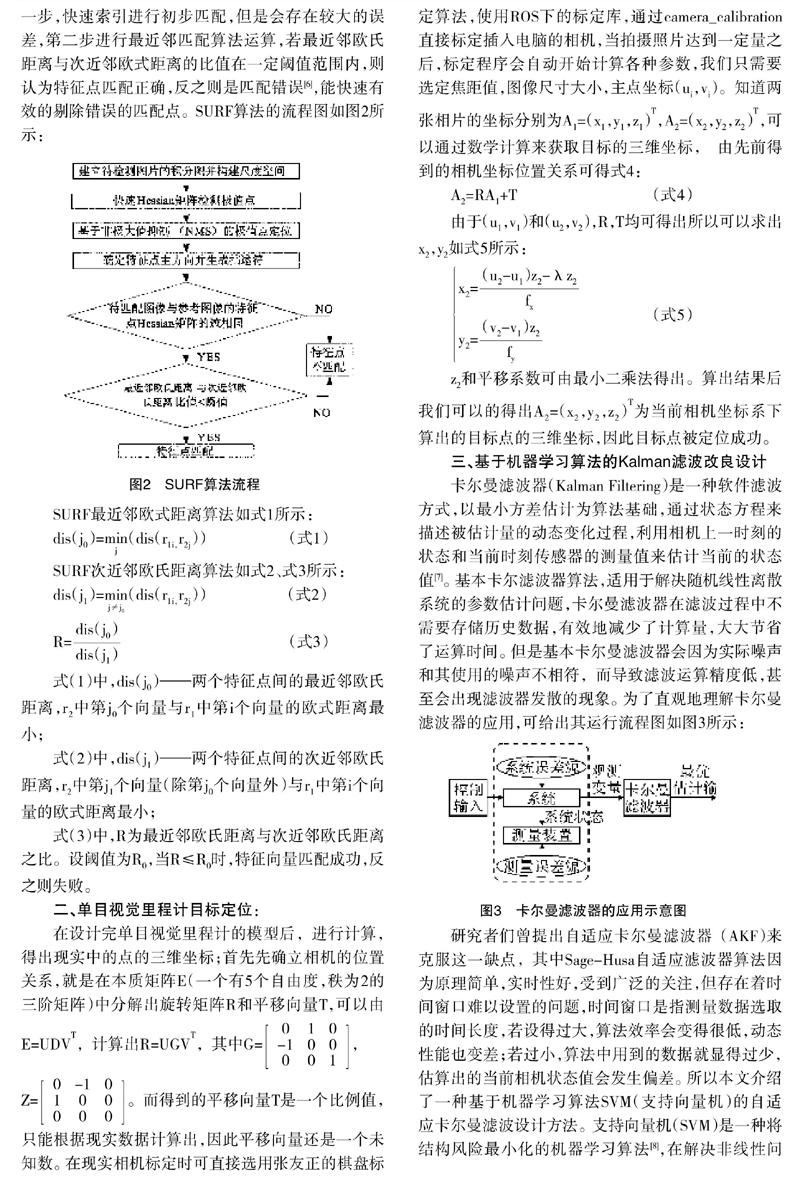
圖片在成像過程中會出現畸變、失真等情況,可以采用灰度插值法或雙線條插值法進行矯正,以起到減小里程計誤差的作用。由于估算圖像特征的運動參數是估算相機運動的關鍵,因此特征的選取顯得尤為重要。選擇具體的物體作為特征,在復雜的外部環境中是不現實的,所以,應該盡可能的選擇簡單,明顯的點線面、角點、特定區域作為特征。在計算圖像特征運動時,需要檢測出兩幅連續的圖像中對應的特征點,然后找出所有特征點之間的對應關系進行匹配[4]。常用的特征點提取算法有Harris角點檢測算法,SUSA(smallest univalve segment assimilating nucleus)角點檢測算法,SIFT,SURF,FAST角點算法等。Harris算法定義局部領域內極大興趣值對應的像素點為檢測的特征點,并不如SURF(Speeded Up Robust Features)算法選取的特征點明顯[5],所以相較于兩者SURF更適合于本課題的研究,SURF基于積分圖像提取特征點,通過Haar小波濾波器描述特征點,是一種集特征提取和描述于一體的算法,其抗干擾能力強,運算量低于SIFT算法,運算速度卻更快,并且結合了SIFT算法的許多優點,因此本文選用SURF算法進行特征提取和匹配。由于SURF算法具有平移、旋轉時尺寸不變的優勢,因此所檢測出的特征無論在哪個角度都是同一個特征,首先給特征點確定一個主方向,以特征點為原點,建立二維直角坐標系,獲得一個64維特征向量r來描述特征點。之后SURF對特征點的匹配就可分為兩步:第一步,快速索引進行初步匹配,但是會存在較大的誤差,第二步進行最近鄰匹配算法運算,若最近鄰歐氏距離與次近鄰歐式距離的比值在一定閾值范圍內,則認為特征點匹配正確,反之則是匹配錯誤[6],能快速有效的剔除錯誤的匹配點。SURF算法的流程圖如圖2所示:
SURF最近鄰歐式距離算法如式1所示:
dis(j)=(dis(rr)) (式1)
SURF次近鄰歐氏距離算法如式2、式3所示:
dis(j)=(dis(rr)) ?(式2)
R= (式3)
式(1)中,dis(j)——兩個特征點間的最近鄰歐氏距離,r中第j個向量與r中第i個向量的歐式距離最小;
式(2)中,dis(j)——兩個特征點間的次近鄰歐氏距離,r中第j個向量(除第j個向量外)與r中第i個向量的歐式距離最小;
式(3)中,R為最近鄰歐氏距離與次近鄰歐氏距離之比。設閾值為R,當R≤R時,特征向量匹配成功,反之則失敗。
二、單目視覺里程計目標定位:
在設計完單目視覺里程計的模型后,進行計算,得出現實中的點的三維坐標;首先先確立相機的位置關系,就是在本質矩陣E(一個有5個自由度,秩為2的三階矩陣)中分解出旋轉矩陣R和平移向量T,可以由E=UDV,計算出R=UGV,其中G=,
Z=。而得到的平移向量T是一個比例值,只能根據現實數據計算出,因此平移向量還是一個未知數。在現實相機標定時可直接選用張友正的棋盤標定算法,使用ROS下的標定庫,通過camera_calibration直接標定插入電腦的相機,當拍攝照片達到一定量之后,標定程序會自動開始計算各種參數,我們只需要選定焦距值,圖像尺寸大小,主點坐標(u,v)。知道兩張相片的坐標分別為A=(x,y,z),A=(x,y,z),可以通過數學計算來獲取目標的三維坐標, 由先前得到的相機坐標位置關系可得式4:
A=RA+T (式4)
由于(u,v)和(u,v),R,T均可得出所以可以求出x,y如式5所示:
x=y= (式5)
z和平移系數可由最小二乘法得出。算出結果后我們可以的得出A=(x,y,z)為當前相機坐標系下算出的目標點的三維坐標,因此目標點被定位成功。
三、基于機器學習算法的Kalman濾波改良設計
卡爾曼濾波器(Kalman Filtering)是一種軟件濾波方式,以最小方差估計為算法基礎,通過狀態方程來描述被估計量的動態變化過程,利用相機上一時刻的狀態和當前時刻傳感器的測量值來估計當前的狀態值[7]。基本卡爾濾波器算法,適用于解決隨機線性離散系統的參數估計問題,卡爾曼濾波器在濾波過程中不需要存儲歷史數據,有效地減少了計算量,大大節省了運算時間。但是基本卡爾曼濾波器會因為實際噪聲和其使用的噪聲不相符,而導致濾波運算精度低,甚至會出現濾波器發散的現象。為了直觀地理解卡爾曼濾波器的應用,可給出其運行流程圖如圖3所示:
研究者們曾提出自適應卡爾曼濾波器(AKF)來克服這一缺點,其中Sage-Husa自適應濾波器算法因為原理簡單,實時性好,受到廣泛的關注,但存在著時間窗口難以設置的問題,時間窗口是指測量數據選取的時間長度,若設得過大,算法效率會變得很低,動態性能也變差;若過小,算法中用到的數據就顯得過少,估算出的當前相機狀態值會發生偏差。所以本文介紹了一種基于機器學習算法SVM(支持向量機)的自適應卡爾曼濾波設計方法。支持向量機(SVM)是一種將結構風險最小化的機器學習算法[8],在解決非線性問題領域有著極大的優勢,恰好在基于SVM的新型自適應卡爾曼濾波算法中,正是運用SVM的回歸預測分析(SVR),將原本復雜的非線性問題通過構造線性函數轉化成線性問題,進而動態的調節卡爾曼濾波器算法中的噪聲矩陣參數。巧妙地避開了選取時間窗口的難題,并且這一新型的算法增加了單目里程計的穩定性和準確性。
四、提高單目里程計算法的研究
如何提高單目里程計算法,可以從三個角度進行分析:魯棒性、實時性和精確度。
1.提高系統的魯棒性。魯棒性可以是指,控制系統在參數攝動情況下保持系統某個性能指標保持不變,即抗干擾能力。在視覺里程計中,局部視覺特征能有效的提高系統的魯棒性,局部視覺特征有尺寸不變特性,并且對復雜的外部環境有很好的檢測能力,適用于室外等復雜場地,若與GPS等設備結合使用,實現多傳感器信息融合。
2.提高系統的實時性。在特征檢測和匹配時,選取有效的少量特征進行檢測和匹配,并運用好的數據加以描述,能有效的提高系統的實時性,簡而言之,特征的選取要易跟蹤,匹配算法要高效可行。可以從兩個角度提高算法的實時性:數據處理并行優化和數據降維。數據降維能高效利用有限的計算能力,主成分分析PCA(Principle component analysis)方式已有效的運用于SIFT數據降維中,可以在大大降低計算量的情況下,達到了相同的特征匹配效果。
3.提高系統的精確度。視覺里程計是一個數據迭代累加的過程,但在迭代累加過程中,都會存在誤差的累積,如何有效地減少誤差的累加,就成了視覺里程計特高精確度的關鍵。減少誤差的累加,應該從選取特征點這一源頭開始。由此特征的選取,檢測和匹配都要選擇合適的方式[9]。特征點的選取應盡量選擇靜止物體的顯著特征,減少特征帶來誤差和大量的無用外點。運用圖的最大團內點檢測方法對錯誤匹配有很強的制約能力。
視覺里程計作為移動機器人自主導航的重要組成部分,已成功運用于海陸空及宇宙探索中,本文主要研究了一種基于機器學習算法的單目里程計算法,僅使用一個攝像機,在不借助于其他傳感設備的幫助下,實現機器的自主定位。本課題引入SURF算法對目標進行特征匹配,提高了系統的魯棒性,同時較SIFT算法提高了運算速度。利用機器學習改善傳統的卡曼濾波,有效的抑制了噪聲發散。通過上述改善,本課題所研究設計的單目里程計在魯棒性、實時性和精準性上有了一定的提高。
參考文獻:
[1]姜國權,何曉蘭,杜尚豐,柯杏.機器視覺在農業機器人自主導航系統中的研究進展[J].農機化研究,2008,(3):9-11.
[2]羅堪.基于復眼模型的視覺里程計方法研究[D].湖南大學,2014.
[3]劉曉利,田媛,童飛,唐艦,隋國榮,陳抱雪.雙目立體視覺的光學標定技術[J]光學儀器,2013,(3):11-15.
[4]蘇宇,郭寶龍.一種基于曲率尺度空間的圖像拼接算法[J].計算機工程與應用2008,(1):39-41.
[5]相陽.基于點特征的圖像配準技術研究[D].東北大學,2010.
[6]白廷柱,侯喜報.基于SIFT算子的圖像匹配算法研究[J].北京理工大學學報,2013,(6):622-627.
[7]戴洪德,陳明,周紹磊,李娟,彭賢.基于支持向量機的自適應卡爾曼濾波技術研究[J].控制與決策,2008,(8):949-952.
[8]張偲敏,汪艷,郭天太,洪博,劉焱煜.支持向量回歸機的參數擇優算法[J].中國科技信息,2015,(13):26-27.
[9]李宇波,朱效洲,盧惠民,張輝.視覺里程計技術綜述[J].計算機應用研究,2012,(8):2801-2805,2810.
A Study on Monocular Mileage based on Machine Learning Algorithm
GU Hai-yan 2,CHEN Ying-jie 1,DING Yao 1
(1.Nanjing University Jinling College,Nanjing,Jiangsu 210089,China;2. Jiangsu Police Institute,Nanjing,Jiangsu 210000,China)
Abstract:Visual odometry(VO) through the trajectory calculation,cumulative motion vector,the relative positioning method of current position. Monocular odometer using only a single camera as image acquisition carrier,make information requirements lower,and can identify and locate the feature point accurately,real-time,cost much less,so it has more wide prospect of application. This paper uses SURF algorithm to simultaneously detect and match feature points,using a machine learning algorithm based on adaptive Calman filter (SVM),slow down will appear originally Calman filter in low precision and divergence,to system optimization of monocular odometric accuracy.
Key words:Single camera;Visual odometry;SURF;Calman filter
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
