陀螺全站儀定向測量方法的淺析與探討
2017-04-09 02:52:46白明張明鵬李巍
環球人文地理·評論版 2017年1期
關鍵詞:探討
白明+張明鵬+李巍
摘要:簡介陀螺全站儀定向真北原理、常用測量方法與數據處理。淺析陀螺全站儀定向觀測逆轉點法和中天法常見的優缺點;探討逆轉點法與中天法觀測時加測時間點和擺幅,判定觀測精度、提高觀測精度和了解儀器情況。
關鍵詞:陀螺全站儀定向測量;逆轉點法;中天法;探討;觀測精度
一、概述
陀螺全站儀是陀螺儀和全站儀結合在一起的儀器。由于它不受時間和環境的限制,同時觀測簡單方便和效率高,而且能保證較高的定向精度,所以它是一種先進的定向儀器,被廣泛應用于礦山井下、地鐵、隧道、地下管廊等各個工程的定向測量。陀螺儀的出現改變了傳統的幾何定向,并在加測陀螺邊的導線測量、聯系測量和檢核方位角等工程測量中得到廣泛應用,減少導線誤差積累,提高定向測量精度。
二、原理
陀螺儀有兩個特性,定軸性和進動性。
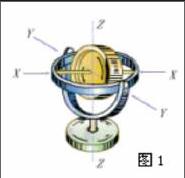
陀螺軸在不受外力作用時,它的方向始終指向初始恒定方位,所謂定軸性;陀螺軸在受外力作用時,將產生非常重要效應“進動”,進動性的結果使陀螺(如圖1 X軸)指向真北方向。陀螺儀的模型如圖1
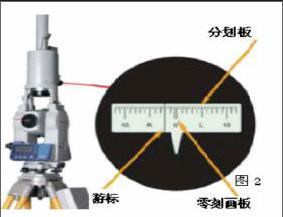
采用懸掛帶懸掛陀螺轉子組成一個擺,并且將這個擺內置在一個圓柱體中組成懸掛式陀螺儀,它可以架設到全站儀上。如圖2這個擺繞地球子午線擺動,其擺動(叫進動)可以通過一個放在該擺上的小鏡來觀察,并可在懸掛帶無轉矩的情況下,通過慢慢旋轉全站儀進行跟蹤它(跟蹤方式)。兩個逆轉點的進動可以通常過全站儀水平度盤讀出并且可計算出進動中心即(真北方向)。當全站儀視準軸與進動中心一致時,儀器望遠鏡即照準真北方向。
三、陀螺方位角、地理方位角和坐標方位角的關系
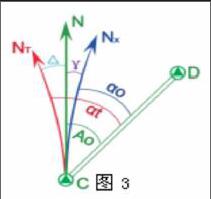
陀螺儀軸與望遠鏡光軸及觀測目鏡分化板零分化線所代表的光軸通常不在同一豎直面中,所以假想的陀螺儀軸的穩定位置通常不與地理子午線重合,二者的夾角稱為儀器常數,一般用△表示。如果陀螺儀子午線位于地理子午線的東邊,△為正;反之,則為負。儀器常數△可以在已知方位角的精密導線邊或三角網邊上直接測出來,如圖3所示精密導線邊CD之地理方位角為Ao.若在C點安置陀螺全站儀,通過陀螺運轉和觀測可求出CD邊的陀螺方位角αt,求出儀器常數:△=Ao-αt。如果已知儀器常數△和測得陀螺方位角αt,測定向邊的地理方位角Ao關系為為:Ao=αt+△。
如圖3所示地理方位角Ao和坐標方位角αo的關系為:Ao=αo+γo。子午線收斂角γo的符號可由安裝儀器點的位置來確定,即在中央子午線以東為正,以西為負,其值可根據安置儀器點的高斯平面坐標求得。 需要求算的井下未知定向邊,也就是要求出其坐標方位角αo,而不是地理方位角Ao,因此,αo=αt-△-γo。
四、陀螺定向測量的一般操作流程
在地面已知邊上采用二或三測回測量陀螺方位角,求得兩個儀器常數△1;在井下定向邊上用二或三回測量陀螺方位角;返回地面后,要盡快在原已知邊上再用二或三測回測量陀螺方位角,求得兩個儀器常數△2;△1和△2差應值小于20″,儀器△1和△2平均數為本次觀測儀器常數△;同一邊任意兩測回測量陀螺方位角的互差不得超過40″;井下同一定向邊二或三次獨立陀螺全站儀定向平均值的中誤差為10",其互差不得超過40″;井上、下觀測應由同一觀測者進行,儀器在搬運時,要防止顛簸和震動;應在三天內完成。
五、逆轉點法和中天法淺析與探討
5.1、逆轉點法
1、操作步驟。全站儀平穩精確跟蹤逆轉點(2個以上),大致測量出陀螺北方向,近似陀螺北偏差應小于60′;照準大致測量的陀螺北方向,下放陀螺,使其游標平穩擺動,用逆轉點法開始通過全站儀平穩的精確跟蹤逆轉點,至少跟蹤5個逆轉點a1、a2…( 如圖5),相鄰擺動中值的互差不能超過20",間隔擺動中值的互差不能超過30";逆轉點法測量完畢后,托起陀螺使陀螺處于完全鎖緊位置,利用全站儀自帶程序計算出陀螺北方向,再進行配盤,轉動望遠鏡測量測線的陀螺方位角;通過逆轉位讀數計算擺動中值,檢驗觀測精度。(相鄰擺動中值的互差不能超過20",間隔擺動中值的互差不能超過30")。(如圖5)
2、逆轉點法優缺點。優點,全站儀跟蹤游標在逆轉位容易判斷和在逆轉位角度容易測量準確,是其操作過程簡便;缺點,用轉動全站儀(轉動時會產生振動對游標產生影響)游標不平穩運行,對精度有影響。
3、提高觀測精度的措施。實際下放陀螺使其擺幅在5-10格之間平穩擺動,觀測儀器應盡量平穩跟中游標,不能驟然跟蹤,否則測量出來的陀螺北方向不準確。
5.2中天法
1、中天法操作步驟。全站儀平穩精確跟蹤逆轉點(2個以上),大致測量出陀螺北方向,近似陀螺北偏差應小于60′;下放陀螺使其擺幅在8-10格之間平穩擺動,用中天法開始觀測;至少測量2個周期( 如圖6),相鄰時間差的互差不能超過0.4s,間隔時間差的互差不能超過0.6s,中天法測量完畢后,托起陀螺使陀螺處于完全鎖緊位置,定出陀螺北方向,轉動望遠鏡測量測線的陀螺方位角;通過K值、擺幅和時間讀數計算擺動中值,檢驗觀測精度。
2、儀器常數K的測定
3、 在更換懸掛帶后或者現測站與前測站緯度差較大時(超過500km距離)應當進行儀器常數的測定,一般在已知邊實際測量和計算獲得,測量計算出的K值與分劃板刻度分化值、D擺幅和T所用時間有關。測量方法如下,取真北方向東10″-15″(N1)用中天法測量時間差△t1和擺幅a1,再取真北方向西10″-15″(N2),用中天法測量時間差△t2和擺幅a2,K=(N2-N1)\(a1*△t1-a2*△t2)
4、中天法優缺點
優點:不用轉動全站儀(轉動時會產生振動對游標產生影響)保證游標平穩運行;
缺點:得先精確定北方向,K隨環境變化過大常需要實地測量計算,在游標經過中心位置速度過快,不易測量時間點,在測量時間上誤差極大。
5、提高觀測精度的措施。K值應當實地測定。下放陀螺使其擺幅在8-10格之間平穩擺動,下放速度及擺幅每測回都要一致。
5.3逆轉點法與中天法改進
1、逆轉點法和中天法的結合。陀螺全站儀定向盡管可以使用逆轉點法和中天法都可以得到真北方向,但實測過程完全不同。為了保證定向精度使用中建議將兩種方法測得的結果進行比較。上下應由同一個觀測者用同一臺儀器分別用兩種方法觀測,應先逆轉點法測得的相對精確結果后再用中天法觀測。兩種方法有利有弊,應互相結合使用,這樣才能為工程測量提供精確的方位角。
2、逆轉點法觀測時加測時間點。逆轉點法觀測時(不影響原觀測方法),在開始跟蹤和結束跟蹤可以用秒表精確時間點,這樣可以利用時間、分劃板刻度分化值和測得的角度,計算分析求出的陀螺方位角,判斷儀器情況和觀測精度。
3、中天法觀測加測擺幅。中天法觀測(不影響原觀測方法),在游標到達逆轉位是精確讀出分劃板刻度(擺幅),這樣可以利用時分劃板刻度分化值和測得的時間,計算分析求出的陀螺方位角,判斷儀器情況和觀測精度。
總結:逆轉點法和中天法在觀測過程中加測時間和擺幅的方法,可得到有用數據,可以計算分析和提高陀螺方位角的精確。目前陀螺全站儀定向主要用于隧道豎井聯系測量和隧道掘進過程中導線測量。陀螺全站儀定測量可以提高導線精度。本文在原有方法的基礎上,提出加測擺幅和時間點的觀測方法,最終獲得高精度坐標方位角。
參考文獻
[1]《于來法陀螺定向》,解放軍出版社,1987年,作者:于來法
[2]《索佳GP1陀螺儀說明書 》 作者:卜飛
猜你喜歡
戲劇之家(2016年19期)2016-10-31 17:15:56
體育時空(2016年8期)2016-10-25 19:28:58
體育時空(2016年8期)2016-10-25 18:51:35
現代企業文化·理論版(2016年14期)2016-10-21 11:08:39
現代企業文化·理論版(2016年14期)2016-10-21 09:19:48
課程教育研究·學法教法研究(2016年21期)2016-10-20 18:00:46
現代經濟信息(2016年19期)2016-10-20 17:59:38
現代經濟信息(2016年19期)2016-10-20 17:32:44
啟迪與智慧·教育版(2016年8期)2016-10-20 16:09:56
商(2016年27期)2016-10-17 07:16:17