工程型院校機器人課程的教學(xué)改革與實踐
2017-04-12 01:16:57劉凌云羅敏李慧玲吳岳敏
課程教育研究·新教師教學(xué) 2016年17期
關(guān)鍵詞:創(chuàng)新能力
劉凌云++羅敏+李慧玲+吳岳敏
摘 要:本文結(jié)合我校自動化專業(yè)人才培養(yǎng)方向,以“工程型人才培養(yǎng)”為主導(dǎo)思想,對機器人教學(xué)內(nèi)容及方法所做改革和探索進行了描述,課程改革中強調(diào)教學(xué)的“工程”與“實踐”性,將學(xué)生創(chuàng)新能力的培養(yǎng)貫穿于機器人教學(xué)的全過程,實踐表明,改革后的機器人教學(xué)內(nèi)容和教學(xué)方法能有效提高教學(xué)質(zhì)量和學(xué)生的實踐能力。
關(guān)鍵詞:機器人教學(xué);工程實踐;創(chuàng)新能力
G642.0;TP242-4
作為具有鮮明汽車行業(yè)背景的地方院校,我校的人才培養(yǎng)定位是為汽車工業(yè)生產(chǎn)第一線培養(yǎng)高級工程應(yīng)用型人才。針對這一總的指導(dǎo)思想,我校自動化專業(yè)明確提出以汽車生產(chǎn)自動化作為專業(yè)方向,把培養(yǎng)和造就綜合素質(zhì)高、工程創(chuàng)新意識和實踐能力強的工程應(yīng)用型人才作為本專業(yè)人才培養(yǎng)目標(biāo),在人才培養(yǎng)計劃、課程設(shè)置等方面大膽的進行改革與探索,突出數(shù)控系統(tǒng)與工業(yè)控制方面的工程訓(xùn)練內(nèi)容及培養(yǎng)方向,形成機械基礎(chǔ)—PLC技術(shù)—數(shù)控技術(shù)及編程—典型數(shù)控系統(tǒng)及應(yīng)用—工業(yè)機器人工程應(yīng)用為主線的汽車生產(chǎn)自動化技術(shù)系列課程。
尤其是工業(yè)機器人技術(shù)廣泛應(yīng)用于各個工業(yè)領(lǐng)域,成為制造業(yè)生產(chǎn)自動化中主要的機電一體化設(shè)備,與PLC、數(shù)控技術(shù)并列成為當(dāng)今工業(yè)自動化生產(chǎn)的三大支柱[1]。為了適應(yīng)這種社會需求的變革,在高等院校中開設(shè)相關(guān)機器人技術(shù)及應(yīng)用的課程和實驗,有利于培養(yǎng)學(xué)生的科學(xué)素質(zhì)和工程意識[2]。
結(jié)合我校自動化專業(yè)在機器人課程方面所做的改革與實踐,本文就課程內(nèi)容的更新、實踐教學(xué)平臺建設(shè)及實驗項目的提煉等進行探討,以期進一步完善和優(yōu)化機器人教學(xué)課程內(nèi)容。
一、機器人課程教學(xué)情況
國內(nèi)許多高等院校都已開展了機器人教學(xué)工作,開設(shè)的專業(yè)也較廣,且課程教學(xué)以理論為主,實驗學(xué)時數(shù)相對較少,大多數(shù)高校的實驗課時數(shù)甚至為零[3]。
我校自動化專業(yè)于2006年開設(shè)《機器人技術(shù)導(dǎo)論》課程,盡管在教學(xué)內(nèi)容上反映當(dāng)前工業(yè)機器人技術(shù)的發(fā)展現(xiàn)狀與趨勢,在教學(xué)方法上從興趣方面引導(dǎo)學(xué)生積極自主地學(xué)習(xí),同時借助于多媒體技術(shù),特別是講解機器人數(shù)學(xué)建模時,結(jié)合動畫和錄像演示以增強教學(xué)的時效性;但教學(xué)環(huán)節(jié)上偏重于教師的講授,學(xué)生獨立思考欠缺、無實踐教學(xué)環(huán)節(jié)、教學(xué)內(nèi)容工程實踐性不強。且本門課程涉及面廣、知識復(fù)雜、公式繁多、內(nèi)容抽象,理解困難就成為歷屆學(xué)生對該課程的共同印象。
二、課程建設(shè)與改進的思考
1.教學(xué)內(nèi)容的更新
依據(jù)我校自動化專業(yè)本科生的培養(yǎng)目標(biāo),且在技術(shù)性層面上最大限度的體現(xiàn)理論和生產(chǎn)實踐相結(jié)合,我校自動化專業(yè)將機器人課程名稱更改為《工業(yè)機器人應(yīng)用技術(shù)》,為配合該課程改革,本專業(yè)先后購置兩套工業(yè)機器人教學(xué)實驗平臺:帶激光焊縫跟蹤的Motoman Up6弧焊工業(yè)機器人及FANAC智能工業(yè)機器人實訓(xùn)系統(tǒng)。
課程授課學(xué)時在原有的30學(xué)時理論教學(xué)基礎(chǔ)上增加了6學(xué)時實驗教學(xué);且在課程教學(xué)大綱上作了相應(yīng)的更新,理論教學(xué)內(nèi)容圍繞實驗室的Motoman Up6工業(yè)機器人系統(tǒng)進行增補和刪減:①在機器人運動學(xué)章節(jié)的講解中,以Motoman Up6工業(yè)機器人結(jié)構(gòu)為對象,將重點放在前向運動學(xué)原理與計算中;②在操作臂的控制這一章節(jié)中將授課重點放在機器人控制器硬件體系及軟件架構(gòu)上。③在傳感器原理講述中,應(yīng)側(cè)重于目前機器人系統(tǒng)中應(yīng)用較多的一些傳感器,如光電碼盤、電位計和機器視覺,并增加機器視覺案例分析:激光焊縫跟蹤系統(tǒng)/攝像機二維位姿檢測在機器人弧焊或上下料中的應(yīng)用;④在機器人軌跡規(guī)劃和編程章節(jié),增加了與Motoman工業(yè)機器人配套的離線編程軟件Rotsy應(yīng)用的講解,便于后續(xù)試驗項目的開展。
同時,在教學(xué)方式上增加了現(xiàn)場講解環(huán)節(jié)。為了讓學(xué)生們能夠更好地理解和掌握機器人運動學(xué)的知識,我們把部分課堂環(huán)節(jié)改在機器人實驗室進行,以真實的Motoman Up6工業(yè)機器人為例,講解機器人的關(guān)節(jié)、連桿、坐標(biāo)系、D-H建模、正運動學(xué)和逆運動學(xué)的知識。這種教學(xué)方式直接、直觀、便于理解,讓學(xué)生的學(xué)習(xí)做到了理論與實際有機結(jié)合。
2.機器人技術(shù)的實踐教學(xué)
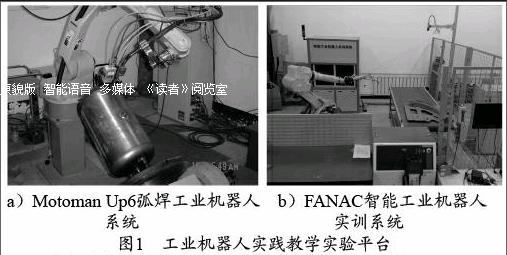
為了鞏固工業(yè)機器人的相關(guān)理論知識和加深對理論認識,培養(yǎng)具有創(chuàng)新意識的高素質(zhì)工程技術(shù)人員,我校自動化專業(yè)先后購置兩套工業(yè)機器人實踐教學(xué)實驗平臺(如圖1所示):帶激光焊縫跟蹤的Motoman Up6弧焊工業(yè)機器人及FANAC智能工業(yè)機器人實訓(xùn)系統(tǒng),并且對本課程相關(guān)的實踐教學(xué)內(nèi)容及方法進行了優(yōu)化改進。
其中弧焊工業(yè)機器人平臺由標(biāo)準(zhǔn)型工業(yè)機器人Motoman Up6、工件變位機、兩套末端執(zhí)行器(CO2保護焊系統(tǒng)、氣動V型夾爪)及Meta視覺系統(tǒng)公司的激光定位系統(tǒng)等組成,另外購置了兩套配套軟件:機器人離線編程軟件Rotsy和機器人通訊軟件Motocom32,由此構(gòu)成了一個完整的機器人工作站,可用于弧焊機器人焊接跟蹤、作業(yè)對象位姿檢測。目前,在該機器人平臺上已開出的本科生實驗有:①Motoman Up6機器人虛擬仿真及離線編程實驗;②工具/工件坐標(biāo)系的標(biāo)定實驗;③復(fù)雜構(gòu)件三維空間模擬點焊實驗;④復(fù)雜構(gòu)件三維空間連續(xù)焊接(帶焊縫跟蹤功能)實驗;⑤車身噴涂軌跡規(guī)劃實驗。
FANAC智能工業(yè)機器人實訓(xùn)系統(tǒng)以白車身沖壓生產(chǎn)線的自動上下料為控制對象,由PLC控制沖床及自動輸送線的動作,工業(yè)機器人根據(jù)智能相機檢測反饋的白車身位姿偏差量對工具控制點進行實時糾正,以適應(yīng)對輸送線上處于任意位姿的工件進行抓取。該系統(tǒng)能從控制系統(tǒng)集成、工業(yè)機器人及機器視覺幾個大方向開展創(chuàng)新實驗設(shè)計,目前已開出的綜合實驗有:①工業(yè)機器人與PLC之間數(shù)據(jù)交互及應(yīng)答通訊;②為滿足各子系統(tǒng)間的協(xié)調(diào)動作,進行機器人運動程序及PLC控制程序設(shè)計;③基于機器視覺的零件位姿/尺寸測量及缺陷檢測等實驗;④基于機器視覺的機器人自適應(yīng)抓取工件程序設(shè)計。
這些綜合性實驗項目的設(shè)置,充分體現(xiàn)了與工程實踐相結(jié)合的的特點,大大豐富了實驗教學(xué)的案例內(nèi)容。
實踐證明這種以工業(yè)機器人作載體,形成理論與實踐相結(jié)合的教學(xué)模式,能充分激發(fā)學(xué)生的學(xué)習(xí)興趣、積極性及創(chuàng)新思維,提高了學(xué)生的實踐動手能力和工程創(chuàng)新意識,使學(xué)生們對于機器人課程有了一個系統(tǒng)的認識和理解。
同時,利用該“工業(yè)機器人教學(xué)試驗平臺”結(jié)合東風(fēng)汽車公司各專業(yè)廠的工程實際項目,有效的指導(dǎo)本專業(yè)部分學(xué)生進行畢業(yè)設(shè)計,例如:“汽車前懸梁架工業(yè)機器人焊接的研究與實現(xiàn)”、“工業(yè)機器人激光焊縫跟蹤子系統(tǒng)軟硬件設(shè)計與實現(xiàn)”、“視覺機器人手眼系統(tǒng)標(biāo)定算法研究”等畢業(yè)設(shè)計課題的開展,學(xué)生既可以在工業(yè)現(xiàn)場了解實際工業(yè)機器人系統(tǒng)的工作原理及運行狀況,同時對現(xiàn)場的不足提出改進意見、制定方案并進行系統(tǒng)軟硬件設(shè)計,進一步在實驗室工業(yè)機器人平臺上加以演示和驗證,使學(xué)生在訓(xùn)練中學(xué)會如何將知識應(yīng)用到生產(chǎn)實際中。
三、結(jié)束語
本文對我校自動化專業(yè)機器人課程理論、實踐教學(xué)的改革進行了探討,力圖最大限度的將大學(xué)生工程實踐能力的培養(yǎng)、訓(xùn)練和形成以及工程創(chuàng)新意識的培養(yǎng)貫穿于機器人教學(xué)的全過程,本教學(xué)項目的研究和實施,為培養(yǎng)“工程應(yīng)用”型人才探索出了一條可行的道路。
參考文獻:
[1] 郗安民,劉穎,陳工,馬祥華等. 工業(yè)機器人教學(xué)實驗工作站[J]. 實驗技術(shù)與管理,2001:18(5): 17-20.
[2] 萬佑紅,蔣國平.機器人教育與大學(xué)生創(chuàng)新能力培養(yǎng)的探索[J].電氣電子教學(xué)學(xué)報,2005:27(4): 6-9.
[3] 戰(zhàn)強,閆彩霞,蔡堯. 機器人教學(xué)改革的探索與實踐[J].現(xiàn)代教育技術(shù),2010:20(3):144-146.
[4] 張國民,張劍平. 課程視角下的機器人競賽輔導(dǎo)研究[J].中國電化教育,2008,262(11):92-94.
[5 ] 胡蓉,蔣海燕. 構(gòu)建“機器人”教學(xué)平臺完善工程訓(xùn)練創(chuàng)新與實踐教學(xué)體系[J]. 決策管理2008,1:73-74.
[6] 李鳴華. 機器人教育的教學(xué)設(shè)計[J].中國電化教育, 2007,247(8) :98-101.
作者簡介:劉凌云,男,湖北荊州人,副教授,研究方向:機器視覺、機器人應(yīng)用研究;E-mail:270228224@qq.com ;羅敏,男,教授,研究方向:數(shù)控技術(shù)等。
猜你喜歡
中學(xué)生學(xué)習(xí)報(2022年13期)2022-04-16 21:07:51
中學(xué)生學(xué)習(xí)報(2022年14期)2022-04-15 22:07:51
化工管理(2021年7期)2021-05-13 00:44:44
甘肅教育(2020年12期)2020-04-13 06:25:30
北方工業(yè)大學(xué)學(xué)報(2019年5期)2019-03-30 06:31:54
信息化建設(shè)(2019年2期)2019-03-27 06:23:58
活力(2019年22期)2019-03-16 12:48:34
活力(2019年22期)2019-03-16 12:48:24
北方音樂(2017年4期)2017-05-04 03:40:28
學(xué)周刊(2016年26期)2016-09-08 09:02:54
