基于并聯(lián)機器人的自動選繭系統(tǒng)的設(shè)計
2017-04-20 12:37:20覃南強梁先斌
科技視界 2017年1期
覃南強 梁先斌
【摘 要】為提高繅絲生產(chǎn)加工中選繭的效率和選繭結(jié)果的準確性,設(shè)計一套基于并聯(lián)機器人的自動選繭系統(tǒng)。介紹系統(tǒng)的總體方案和控制方案,設(shè)計了傳送帶裝置、視覺系統(tǒng)和機器人末端抓取裝置,通過視覺系統(tǒng)識別和并聯(lián)機器人動態(tài)跟蹤抓取實現(xiàn)了自動選繭功能。
【關(guān)鍵詞】并聯(lián)機器人;自動選繭;視覺識別;動態(tài)抓取
0 引言
選繭是蠶繭繅絲生產(chǎn)中重要的工序之一。選繭的目的,是為了合理使用原料繭,保證生產(chǎn)效率和繅制品質(zhì)優(yōu)良的蠶絲[1]。想要使繅絲生產(chǎn)的效率高,產(chǎn)品的質(zhì)量好,提高回收率,進廠的原料繭就必須進行嚴格的挑選,剔除混在各批繭中不能繅絲的殘次繭,選出可繅絲的上車繭,為繅絲生產(chǎn)穩(wěn)定、正常創(chuàng)造條件。
目前,選繭工序大部分采用的肉眼評定法[2],通過光照的方式進行識別,選繭結(jié)果的準確性易受人員技術(shù)水平、精神狀態(tài)等主觀因素影響,存在誤選率高、勞動強度大等缺點,特別黃斑繭等污斑面積接近標準規(guī)定值時更是如此。此外,現(xiàn)有的自動選繭設(shè)備需要通過異型傳送帶進行蠶繭輸送,且只能一個一個識別和剔除殘次繭,存在生產(chǎn)效率低、適應(yīng)性差,升級困難等問題。本文主要針對上述選繭技術(shù)中存在的缺陷和不足,設(shè)計了基于并聯(lián)機器人的自動選繭系統(tǒng)以提高選繭效率和選繭結(jié)果的準確性。
1 系統(tǒng)總體設(shè)計
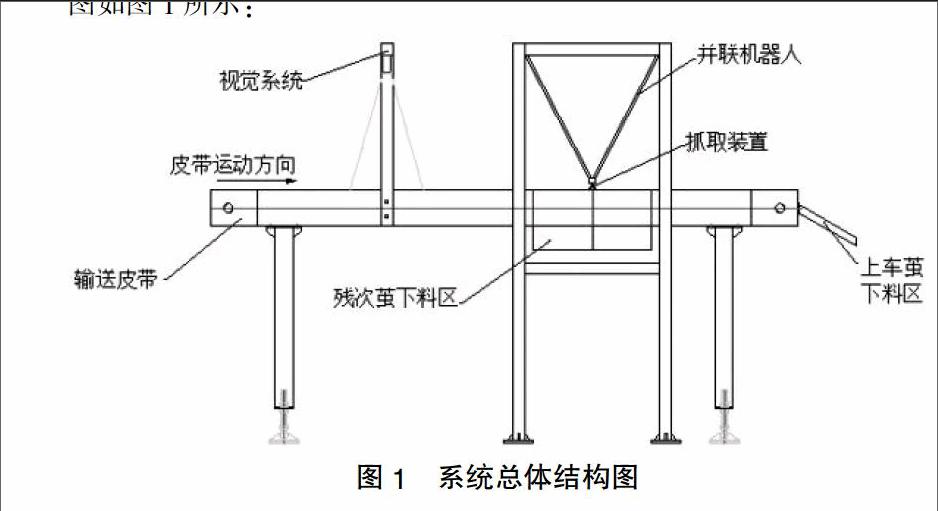
自動選繭系統(tǒng)主要由傳送皮帶裝置、視覺檢測識別系統(tǒng)、并聯(lián)機器人、機器人末端抓取裝置、蠶繭下料區(qū)等組成。系統(tǒng)的總體機構(gòu)示意圖如圖1所示:
自動選繭系統(tǒng)工作流程如下:由剝繭工序后下來的蠶繭均勻分布到傳送皮帶前端,勻速運動到視覺檢測識別系統(tǒng)的檢測范圍下。視覺系統(tǒng)將視覺范圍下的所有蠶繭進行拍照采集,然后與標準蠶繭模型進行比較,從而將不能繅絲的下繭、雙宮繭等殘次繭識別出來,同時將這些殘次繭的中心坐標通過總線傳送給并聯(lián)機器人系統(tǒng)。當(dāng)蠶繭運行到并聯(lián)機器人抓取區(qū)域,機器人通過之前的視覺系統(tǒng)傳送的目標蠶繭坐標和傳送帶裝置上編碼器反饋的運行速度換算成抓取區(qū)域的坐標,控制末端抓取裝置對殘次繭的動態(tài)跟蹤抓取,并將其放入相應(yīng)的殘次繭下料區(qū)。正常的蠶繭則通過輸送帶進入上車繭下料區(qū)。整個系統(tǒng)工作流程實現(xiàn)無人化和自動化。
2 系統(tǒng)控制方案
在自動選繭中控制系統(tǒng)是核心部分,控制系統(tǒng)保證自動選繭生產(chǎn)線各個組成部分的協(xié)調(diào)工作。
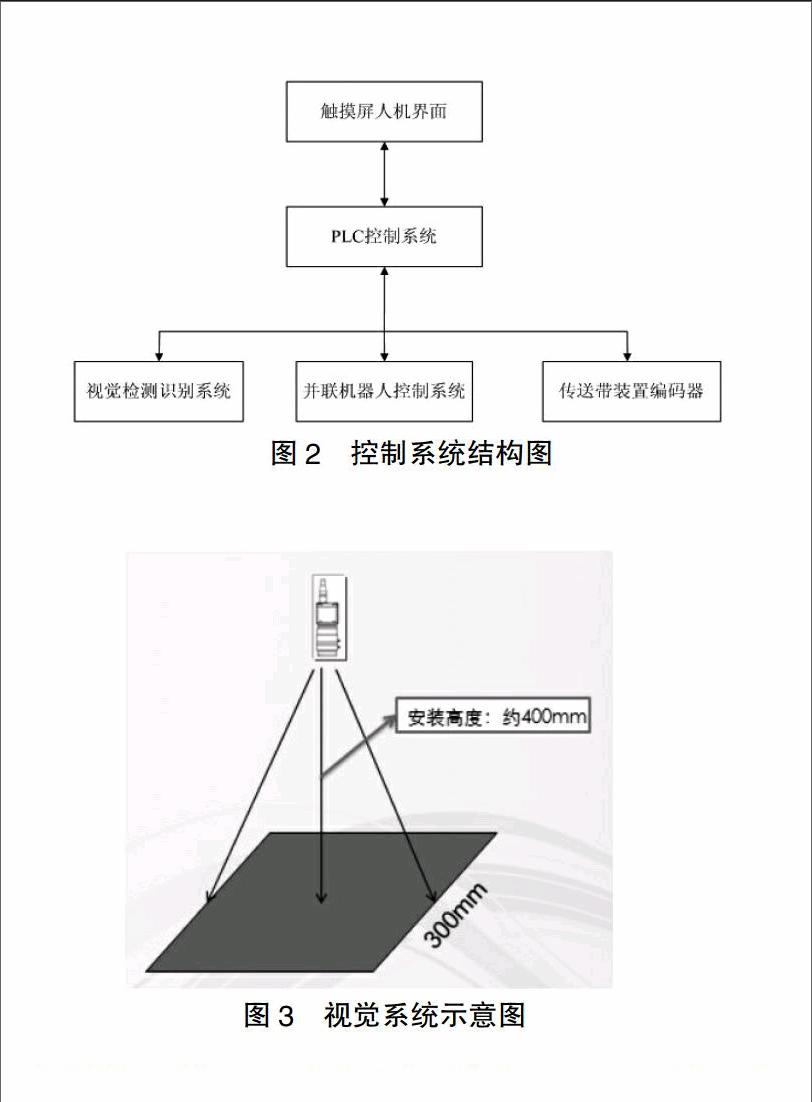
控制系統(tǒng)的框圖如圖2所示:
控制系統(tǒng)中PLC作為中央控制系統(tǒng),接收并處理視覺檢測識別系統(tǒng)、并聯(lián)機器人和傳送帶編碼器發(fā)送過來的信號,控制系統(tǒng)的啟停和告知機器人執(zhí)行相應(yīng)的程序,控制整個系統(tǒng)的工作和循環(huán)。PLC接有人機交互的觸摸屏,觸摸屏主要負責(zé)系統(tǒng)各部分的參數(shù)設(shè)置,狀態(tài)顯示,殘次繭計數(shù)等。
3 自動選繭系統(tǒng)的實現(xiàn)
3.1 傳送帶裝置設(shè)計
傳送帶裝置主要負責(zé)選繭流水線的運動速度調(diào)節(jié),傳送帶后端還安裝了殘次繭下料區(qū)和上車繭下料區(qū)。根據(jù)常用人工選繭裝置的尺寸和速度,確定傳送帶裝置相關(guān)參數(shù)如下:有效寬度確定為250mm,長度為3000mm;輸送帶上表面距離地面800mm;輸送帶最大速度可達10m/min;使用同步帶,避免打滑情況;使用變頻電機,配置變頻器、編碼器來調(diào)整和反饋傳送皮帶速度;四個腳具有調(diào)水平裝置,保證整套裝置穩(wěn)固。
3.2 視覺檢測識別系統(tǒng)設(shè)計
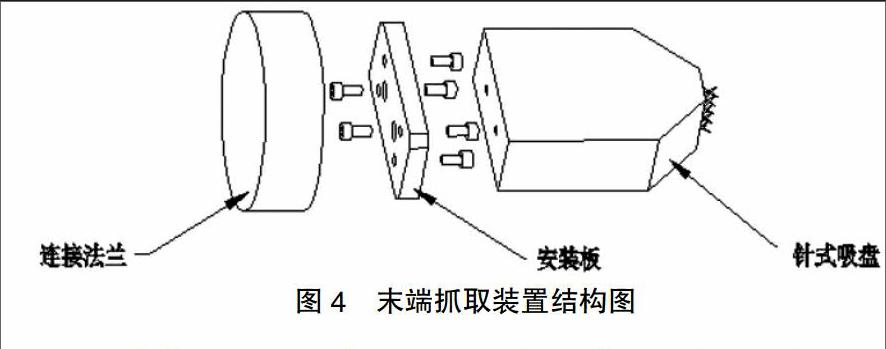
視覺檢測識別系統(tǒng)主要包括支架、智能相機、鏡頭、光源和IO通訊模塊,其中智能相機、鏡頭和光源安裝在支架上,IO通訊模塊通過線纜與智能相機連接。視覺系統(tǒng)示意圖如圖3所示:
智能相機選用為500萬像素的彩色相機,5mm鏡頭,安裝高度約為400mm。采用動態(tài)拍照在線檢測長度為300mm的蠶繭。系統(tǒng)通過與預(yù)設(shè)的蠶繭標準模型進行對比識別,根據(jù)體積大小和橢圓曲率檢測出雙宮繭;根據(jù)色斑和陰影面積大小檢測出黃斑繭、穿頭繭等。然后通過坐標變換,將圖像坐標系轉(zhuǎn)為機器人坐標系,把識別出的殘次繭中心坐標傳給并聯(lián)機器人。
3.3 機器人末端抓取裝置設(shè)計
由于被抓取對象的形狀、尺寸、材質(zhì)、重量、表面狀態(tài)等各不相同,機器人的末端執(zhí)行器是各種各樣的,大致可分為夾鉗式取料手、吸附式取料手、專用操作器及轉(zhuǎn)換器和仿生多指靈巧手等[3]。流水線上的蠶繭尺寸大小不一,排列也較為緊密。采用夾鉗式取料手,如氣爪,則其尺寸無法確定,抓取時也易碰到其他蠶繭,而且抓取速度也較慢;采用一般的吸附式取料手,如真空吸盤,由于蠶繭表面透氣性強,而且表面形狀也是不規(guī)則的,真空吸盤也無法滿足要求。因此,專門設(shè)計了一種針式吸盤蠶繭抓取裝置,可其結(jié)構(gòu)示意圖如圖4所示:
針式吸盤蠶繭抓取裝置通過連接法蘭安裝在機器人末端工具端臺上,機器人根據(jù)殘次繭的中心坐標運動到抓取位置,通過機器人控制系統(tǒng)控制裝置的鋼針伸出和縮回從而實現(xiàn)殘次繭的抓取和放置,裝置還具有吹氣功能,可實現(xiàn)殘次繭快速、精準地釋放。
3.4 并聯(lián)機器人選型
并聯(lián)機器人又名Delta機器人,通常具有3個空間自由度和1個轉(zhuǎn)動自由度,通過視覺系統(tǒng)捕捉目標物體,由三個并聯(lián)的伺服軸確定抓具中心(TCP)的空間位置,其主要性能參數(shù)包括工作范圍、最大負載、工作節(jié)拍和自由度等。
3.4.1 工作范圍
傳送皮帶寬度為250mm,因此機器人的工作范圍≥500mm就可以滿足要求。
3.4.2 最大負載
由于抓取的是蠶繭,加上抓取裝置后機器人的負載也不會太大,故≥2kg就可達到應(yīng)用要求。
3.4.3 工作節(jié)拍
機器人的抓取范圍為250×500mm,在這一范圍內(nèi)蠶繭均勻分布,不粘連的個數(shù)約50個。傳送帶的最大速度為4m/min(66.67mm/s),因此蠶繭通過機器人抓取區(qū)域的時間:500/66.67=7.5s。抓取區(qū)域的殘次繭率最大為20%計算,即50×20%=10個。因此機器人在7.5s內(nèi)最多需要抓取10個殘次繭。抓取軌跡與機器人的標準軌跡25/305/25(mm)近似。由此,可得出機器人運動節(jié)拍:7.5/10=0.75秒/次(80次/分鐘),考慮氣動系統(tǒng)吸附時間,機器人運動節(jié)拍≥0.5秒/次(120次/分鐘)
3.4.4 自由度
由于機器人末端抓取裝置抓取蠶繭的中心位置即可,可無需旋轉(zhuǎn)自由度。因此,機器人的軸數(shù)≥3就可滿足要求。
通過上述分析和計算,自動選繭系統(tǒng)選用了優(yōu)愛寶型號為DELTA700的并聯(lián)機器人,其工作范圍為700mm,最大負載為3kg,工作節(jié)拍可達150次/分鐘,可滿足系統(tǒng)的要求。
4 結(jié)語
本自動選繭系統(tǒng)已在某繭絲生產(chǎn)廠進行了試運行,實現(xiàn)了全自動化選繭,自動化程度高,降低了人為因素的影響,節(jié)約了用工成本。
采用并聯(lián)機器人系統(tǒng)可對目標蠶繭進行快速分選,分選速度可達到 80次/分鐘,遠遠高于一檔選繭工55次的技術(shù)水平[4],可以動態(tài)分選傳送帶上的多個蠶繭,分選效率大大提高,且并聯(lián)機器人高可靠性,可長期穩(wěn)定的運行。此外,還可通過修改視覺系統(tǒng)的蠶繭模型標準和并聯(lián)機器人的運行路徑,可實現(xiàn)不同種類和批次的蠶繭分選,柔性化程度高,適應(yīng)性強,值得在繭絲加工行業(yè)進行推廣。
【參考文獻】
[1]薛振福.選繭對繅絲產(chǎn)量質(zhì)量回收率的影響[J].遼寧絲綢,2006(1):27-28.
[2]李永強,陳麗君.談柞蠶選繭的現(xiàn)狀及自動化的可行性[J].農(nóng)業(yè)科技與裝備, 1995(1):38-39.
[3]黃賢新.工業(yè)機器人機械手設(shè)計[J].裝備制造技術(shù),2012(3):220-221.
[4]陳大軍.選繭工藝設(shè)計探討[J].四川絲綢,1993(2):19-20.
[責(zé)任編輯:田吉捷]
