基于AIS信息的船舶航跡動態行為分析技術研究
2017-04-20 00:29:50何時浩
科技視界 2017年1期
何時浩
【摘 要】目標船舶航跡的動態行為分析對駕駛決策、交通管制、事故分析等有著很大的意義。利用matlab編程將AIS獲取的經緯度信息轉化成高斯平面直角坐標系信息,對轉化后的數據運用軟件編程進行最小二乘法的三次擬合能取得較好的效果。再結合船舶操縱運動方程對擬合的曲線進行分段擬合處理,提高精度,最后通過實驗仿真進行檢驗。仿真結果表明,本文采取的算法能大大提高航跡復原的精確度,對船舶的動態行為分析起到了很大的幫助。
【關鍵詞】最小二乘法;分段擬合;航跡復原
0 引言
隨著各國海運業的發展,船舶密度的增加,船舶的安全問題就顯得特別突出,實現高效的交通管制和事故分析就成為各國亟待解決的問題。準確地復原航跡線不僅對船舶的行駛狀態有所了解,而且對出現事故的船舶也能做進一步地分析處理。
首先是對AIS獲取的經緯度位置信息進行坐標的轉換,變成平面直角坐標系信息,便于處理[1];其次是先通過已知點推算臨近時刻的數據點,增加擬合點的數量,然后運用基于最小二乘法的三次擬合算法并結合船舶操縱運動方程對擬合曲線進行分段處理,提高精度[2-3];最后是結合實例,對本算法運用matlab軟件編程進行仿真實驗,驗證其精確性。
1 數據轉換
船舶航行時,通常用的是全球定位系統(GPS)獲取實時信息,在研究船舶航跡過程中,常利用投影的辦法將船舶空間數據轉換為平面數據,從而可以在平面內繪制船舶航行軌跡。本文采用的是高斯-克呂格投影將經緯度信息轉換為平面信息[4]。
1.1 GAUSS-KRUGER變換
在高斯-克呂格投影面上,赤道與中央子午線投影后都是一條直線,我們建立坐標系,以兩者交點O作為坐標軸原點,縱坐標在這里稱為x軸,對應于中央子午線的投影直線,橫坐標為y軸,對應于赤道投影后的直線,這樣就形成了高斯平面直角坐標系。
對于高斯-克呂格投影,橢球面上的一點映射到平面上的一點,計算公式用級數展開[5];子午線弧長是橢球面上由赤道到投影點的距離,可由級數展開來計算。
1.2 數據預處理
導航定位的精度在數據測量方面是非常重要的。GPS本身的精度很高,但是在復雜的海況下受到氣候、溫度等因素的影響,另外還受到船身搖擺的幅度影響,這些都會影響接收機記錄數據,難以精確測定船舶的航行軌跡。在利用GPS數據計算之前,首先須對接收來的大量信息進行分離提取、顯示等環節的處理,這是保證海上地球物理調查數據質量的前提,主要有以下幾個方面[6]:
1)獲取的數據有很多無效數據,用濾波的方法剔除;2)將數據格式統一起來,方便后面調用;3)對檢測出有整周跳變的數據點,需要查找并恢復這些跳變。
2 船舶回轉運動和航跡的擬合
船舶在航行過程中,為了避讓他船或躲避障礙物,需要通過操舵來改變舵角,從而改變航向。為了研究船舶的航跡擬合曲線和船舶回轉運動,船舶操縱運動方程對分析軌跡起到了非常重要的作用。
2.1 船舶操縱運動方程
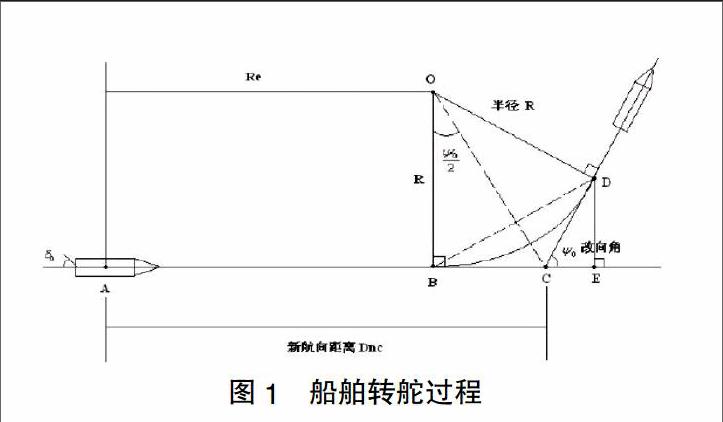
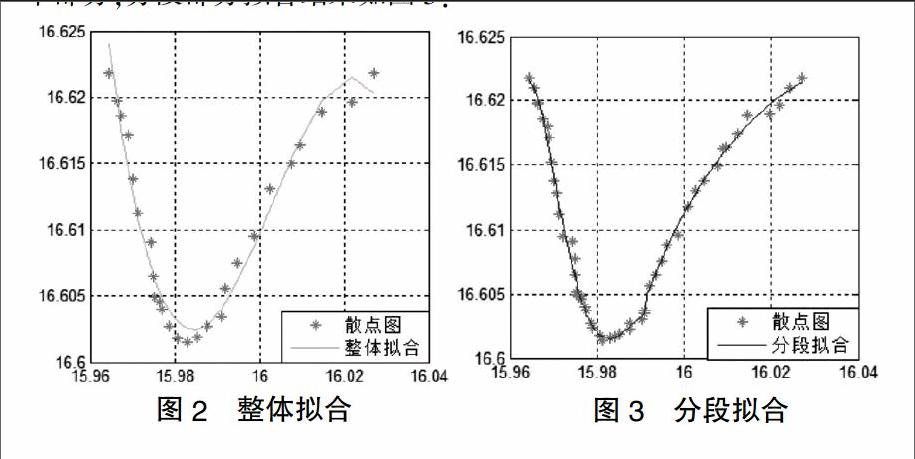
將船舶由操舵產生的各種運動變化看作輸入,輸出為運動變化響應關系,并且在分析Z型操縱實驗的基礎上得到了船舶操縱運動單狀態變量線性方程:T■T■r+(T■+T■)r+r=K?啄+KT■?啄,其中T1,T2是船舶固有運動響應時間常數,在條件穩定的情況下T1,T2為正實數,且T1,< 該方程反映了船舶操舵角與轉向角速度之間的關系,即船舶一階操縱運動方程。式中r表示船舶轉向角速度,r'表示船舶轉向角加速度,?啄代表操舵角,K,T系數是船舶操縱性指數,分別表示船舶回轉性指數和航向穩定性指數。 2.2 船舶回轉運動 航行中的船舶在操舵后進行的運動我們稱之為船舶回轉性運動。船舶在回轉運動過程中會有一個航跡線的變化過程,圖1是船舶在操舵過程中的運動情況: 船舶在轉舵過程中作曲線運動,我們將首向角改變弧度后的軌跡進行近似處理,看作是以R為半徑的圓弧。根據船舶新航向距離,可以為船舶在何時何地施舵,確保船舶在現在所行的航道上準確地逐漸行駛到新的航道上,同時根據船舶新航向距離,以船舶回轉運動開始及結束作為數據分段點,模擬船舶航跡。 2.3 航跡擬合 運用最小二乘法三次擬合算法進行航跡擬合得到的軌跡圖誤差相對較大。我們采取先后兩種處理手段:第一,通過增加擬合點的數量來提高擬合的精確度;第二,采用分段曲線擬合的方法。結合上文中提到的船舶操縱方程,得出船舶轉向角與舵角關系,并以轉舵點為數據劃分點,將數據分成若干段。為了保證最終的擬合效果達到最佳,該算法必須滿足以下兩點要求:1)為了確保擬合的曲線不出現間斷點,必須保證分段函數每段的第一個點和最后一個點在擬合函數上;2)為了保證曲線的光滑性,要保證每段第一個點的導數值要和前一段最后一個點的導數值相等。 先設擬合曲線,求得它的近似值,再求它與實際值的差,可得到殘差的平方和,通過對目標函數展開、轉換,最終可以寫成矩陣模式,從而轉化為求最小值的問題。考慮到約束條件,對于第一段擬合函數的約束條件,只需考慮其連續性即可,對于中間段擬合函數,約束條件還要加上一個光滑性。 綜上所述,原等式約束的最小二乘法問題被轉化成一般形式的二次規劃問題[7-8],帶入矩陣數據,根據二次規劃計算公式以及利用matlab軟件即可得到最優解。 3 仿真 通過AIS收集到的船舶經緯度信息,然后經轉換算法轉換到高斯平面直角坐標系中,進行實驗仿真。具體思路如下,首先會對整體數據進行最小二乘法三次擬合處理,如圖2,可以發現擬合的效果并不是很好,誤差很大,所以接下來會進行增加擬合點數和分段擬合處理,再對每一部分進行最小二乘法三次擬合處理。根據上文提到的船舶操縱方程以及船舶轉向角速度與舵角的關系,可以將這組數據分成三個部分,分段部分擬合結果如圖3: 從圖2、圖3我們很明顯可以看出,經增加擬合點數和分段處理后的擬合效果要比整體擬合效果好很多,所以本文采用的方法提高了航跡的精確性,更加接近與真實航跡,從而可以分析任意時刻船舶的動態行為。 4 結語 本文通過利用AIS收集到的船舶經緯度信息將處理后的數據進行分段擬合,采用基于最小二乘法三次擬合算法并結合船舶操縱方程及轉向角速度與舵角之間的關系,將整體數據分為三段,分別進行擬合處理,并建立擬合模型。通過矩陣運算將擬合函數轉化為二次規劃問題,最后通過實驗仿真驗證其有效性。為了提高擬合精度,采取了增加已知點臨近處的點跡作為已知擬合點,擬合結果表明,本文采用的方法明顯提高了航跡復原的準確性,從而能夠更加精確地進行船舶在任意時刻動態行為的分析。 【參考文獻】 [1]趙森,許振宇,等.地理坐標與直角坐標相互轉換的算法[J].火力與指揮控制,2001,26(4):64-66. [2]趙戰興.最小二乘法分段在船舶航跡擬合研究中的應用[J].艦船科學技術,2016,38(3):85-87. [3]張東林.分段最小二乘法曲線擬合[J].沈陽大學學報,1994(2):80-83. [4]劉健,劉高峰.高斯——克呂格投影下的坐標變換算法研究[J].計算機仿真,2005,22(10):119-124. [5]熊娟.內河船舶航跡擬合與模糊優化調度研究[D].武漢:武漢理工大學,2013. [6]周保興.GPS數據預處理方法研究及其應用[D].南京:河海大學,2005. [7]張春.多項式曲線擬合的計算機解法及應用[J].西北水電屯,1993(3):20-21. [8]方曼,張尚劍,等.可用于艦船預測的多項式擬合方法及參數選擇[J].艦船科學技術,2005,27(2):24-26. [責任編輯:田吉捷]
