智能管道探測機器人的研制
2017-04-21 10:33:28張卓陳旭王文斌趙越
無線互聯科技 2017年3期
關鍵詞:機器視覺
張卓 陳旭 王文斌 趙越

摘要:管道作為一種重要的物料運輸手段,其應用范圍極為廣泛。在對工業管道檢測現狀進行調研的基礎上,文章設計了應用于工業管道的結合機器視覺技術的智能管道探測機器人。其原理是在目前已普及的輪式小車的基礎上結合機器視覺設備和信號傳輸設備,與各種探測傳感器合作。利用機器視覺技術解決了探測機器人在復雜環境下的探測的局限性以及通過無線信號傳輸解決線纜的穿引問題。本系統機器視覺模塊采用現成的DSP+FPGA開發板,進行再次開發,實現圖像采集與處理。
關鍵詞:管道探測機器人;機器視覺;DSP
管道在使用過程中,由于雜質的長期堆積,會在管道各個地方形成堵塞,產生損傷故障。如果不及時對管道進行檢測、維修及清理,就可能阻礙工業生產,造成損失。因此及時探測管道工作環境顯得尤其重要。然而,管道內部環境狹窄難以人工作業。因此最有效的方法
就是利用管道探測機器人來實現對管道內工作環境的探測。
機器視覺技術可以快速獲取大量信息,而且能處理大量圖像數據,機器視覺系統的特點是可以提高生產的智能化和自動化程度。在管道探測機器人方面,通過相關文獻和網絡調研發現,國內傳統管道機器人的采用有線控制的結構模式以及傳輸圖像信號未經機器視覺處理。人們通過對它的技術和實物運行進行分析了解發現,這種結構具有一些缺點。首先,傳統探測機器人采用有線式控制的結構模式會隨著機器人運動距離增大與環境的復雜多變而阻礙機器人的運動,這樣使得探測機器人對環境要求較高,而對環境適應性較差。其次,機器人對于一些有煙霧或者有毒氣體以及能見度較低的環境的探測,如果未經處理而直接回傳圖像信息使探測的結果準確度較低。
通過機器視覺和無線信號傳輸與洞穴探測相結合可以提高此智能管道探測機器人對環境的適應性以及對環境探測的準確度。因此,研發這種與機器視覺結合的智能管道探測機器人具有一定的市場前景和科研價值。
1.機器人的結構設計
1.1整體結構
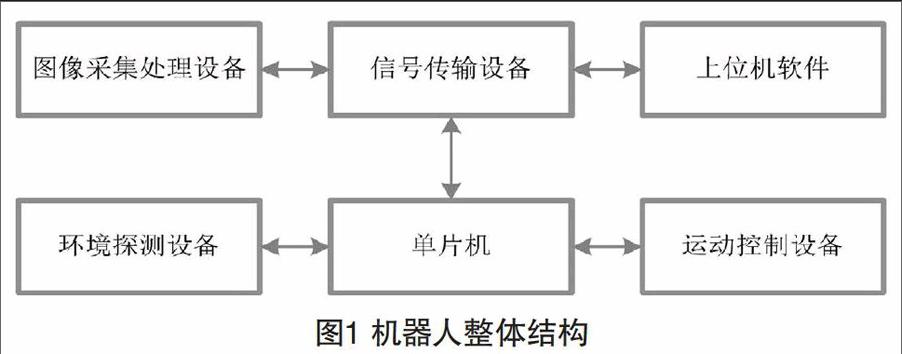
本項目所研究的智能管道探測機器人設計為兩層層架構,尺寸為40cmX30cm×30cm,最上面一層頂端安放攝像頭以及安放DSP+FPGA圖像采集與處理設備,第二層安裝運動控制設備與運動驅動設備和信號傳輸設備以及探測設備和電源。該智能管道探測機器人以輪式機器人形式開發,由于機器人要求在較為復雜的環境下運動進行探測,因此,在滿足功能的前提下機器人要求體積最小,而要求智能管道探測機器人在管道內穩定且靈活運動則要求機器人結構重心低并且車輪大。機器人整體結構如圖1所示。
1.2攝像頭模塊
為更好實現該款智能管道機器人的圖像采集功能,采用了720P的高清攝像頭,并搭載了2個自由度攝像云臺,使用舵機操作控制。從而使攝像機能夠實現上下左右多角度的旋轉,在實際操作下,能夠采集到更多的圖像信息便于后面的機器視覺圖像處理。
1.3DSP模塊
根據實際需求數字處理部分必須采用以數字信號處理(Digital Signal Processing,DSP)芯片為核心的嵌入式圖像采集處理系統,以滿足機器人對圖像處理的快速性,精確度高,低功耗的要求。同時,本智能管道探測機器人直接使用現成的DSP+FPGA開發板,進行再次開發,可以極大限度地縮短本模塊的設計開發周期。同時,該DSP系統具有體積小、重量輕的特點,非常適合安裝在機器人上。
1.4運動控制與驅動模塊
為使移動機器人具有較高的機動性和靈活性,能準確迅速地完成前進、后退、轉向與急停等動作,需要對智能管道探測機器人的運動控制芯片與驅動芯片以及電機進行精心選擇。本機器人的運動控制模塊與驅動芯片設計采用80$52單片機與LM629芯片,而電機選用直流伺服電動機。
1.5探測設備
本智能管道探測機器人在機器人上加裝不同的探測傳感器可以實現不同數據的探測。例如可以通過在智能管道探測機器人上安裝用于溫度、濕度、有毒氣體等探測傳感器與位置傳感器實時回傳環境的數據。探測設備與單片機串口連接通過信號傳輸模塊傳輸實時環境數據。
2.機器視覺處理的實現
此部分主要包括的是對攝像頭采集的圖像進行圖像處理,例如圖像去霧處理、降噪處理、圖像增強處理、圖像壓縮處理。對于本智能管道探測機器人,機器視覺處理過程運算量大且復雜,因此需要較高的運算速度和運算精度,可以考慮時鐘頻率高的浮點型DSP來解決計算精度問題和速度問題。本智能管道探測機器人機器視覺處理部分的開發以及機器視覺處理過程如圖2-3所示。
2.1圖像壓縮
對于本智能管道探測機器人,機器視覺處理過程運算量大且復雜,因此需要對管道內采集的圖像進行壓縮處理,其首要任務是設法去掉各種冗余的數據。為了提高后續圖像處理的精度,本智能管道探測機器人采用的無損壓縮算法為LZw壓縮算法。LZW壓縮技術具有很高的壓縮比,可以在保持管道內部圖像準確度的前提下降低后續圖像處理的計算量。
2.2圖像降噪
管道應用與各種復雜惡劣的生產環境。因此管道環境通常處于亮度弱能見度低的條件下,因此在管道中采集常常會受到各種噪聲的干擾和影響而使圖像降質。本智能機器人采用偏微分方程降噪算法,偏微分方程具有各向異性的特點,應用在圖像去噪中,可以在去除噪聲的同時,很好地保持邊緣吲。
2.3去霧處理
管道探測機器人在實際運用中會在具有煙霧,能見度低的環境下工作。這種環境導致攝像機采集到的管道圖像存在模糊對管道環境探測不明的情況,這時使用去霧算法來對采集到的管道環境圖像進行處理。該智能管道探測機器人使用的Dark Channel Prior算法可以還原圖像的顏色和能見度,是一種簡單有效的去霧方法。通過我們核心去霧算法的實現,能夠看到所對采集的視頻圖像經過自動去霧處理后變得明顯清楚,通過此功能的應用,智能管道探測機器人應用到一些有毒有色氣泄漏或者有煙霧的管道進行探測工作。
2.4圖像增強
圖像增強的目的是提高管道圖像的質量,除噪聲,提高圖像的清晰度突出探測視頻流中重要的部分,使管道環境中物體輪廓清晰,細節明顯。本智能管道探測機器人圖像增強處理采用對數圖像增強算法,對數圖像增強是圖像增強的一種常見方法,通過圖像增強算法提高了對環境探測的準確度以及增加了對管道環境的了解。
3.控制系統設計
該系統中,由高清攝像頭與TI公司的視頻采集子卡負責圖像的采集。通過圖像處理母板獲得視頻采集子卡捕獲的管道圖像信息后對其進行處理,經過復雜的圖像算法處理后通過信號傳輸模塊進行傳輸。同時,通過通信接口,信號傳輸設備參數傳遞給89S52單片機。89S52主要完成以下功能:首先,接收通信接口的控制數據,經程序運算輸出左右輪的速度參數,下載運動參數給IM629芯片控制直流電機工作。其次,89S52單片機將傳感器獲取的探測數據通過通信串口傳輸到信號傳輸設備。
根據整體設計分析,最終確定系統的總體方案如圖4所示。
4.結語
本智能管道探測機器人的核心技術涉及機器視覺技術的實現,機械結構與控制系統結構的實現。首先,為了避免數據信號線降低管道探測機器人環境適應能力,使其探測具有較大局限性,本智能管道探測機器人采用無線信號傳輸。其次,將機器視覺技術與管道探測機器人相結合發揮了機器視覺技術精度高、智能化、靈活性好的優點,使本智能管道探測機器人在有煙霧、能見度低的環境下,精確地探測管道環境,并且對于一些特殊復雜的環境探測具有很強的環境適應性。
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30