四旋翼飛行器的懸停控制問題探討
2017-05-10 08:33:06王忠生
赤峰學院學報·自然科學版 2017年8期
王忠生, 閆 超
(1.合肥工業大學 機械工程學院,安徽 合肥 230000;2.淮北職業技術學院,安徽 淮北 235000;3.安徽天路航空科技股份有限公司,安徽 淮北 235000)
四旋翼飛行器的懸停控制問題探討
王忠生1,2,3, 閆 超3
(1.合肥工業大學 機械工程學院,安徽 合肥 230000;2.淮北職業技術學院,安徽 淮北 235000;3.安徽天路航空科技股份有限公司,安徽 淮北 235000)
四旋翼飛行器因其自身多方面的優點,得到了廣大企業家與研究者的關注.本文將重點研究四旋翼飛行器的懸停控制問題,首先介紹了四旋翼飛行器的系統結構,隨后建立得到懸停狀態動力學模型,最后以卡爾曼濾波作為基礎,真正實施PID控制工作.
四旋翼;飛行器;懸停控制;問題研究
引言
四旋翼飛行器相較于其他飛行器來說結構更加簡易,同時載荷能力也更強,并具備機動性能好與垂直起降等特征.目前四旋翼飛行器更多是作為無人駕駛飛行平臺狀態存在,并引起了大量科學家與企業家的注意.在本文內容中將重點討論四旋翼飛行器懸停控制方面的問題,并通過歐拉-朗格朗日方程設計得到對應力學模型,進而獲得四旋翼姿態測量硬件系統.筆者同時也通過卡爾曼濾波融合算法進一步針對陀螺儀與加速度計展開處理,最終得到懸停狀態下的PID控制器.
1 四旋翼飛行器系統結構
四旋翼飛行器本身使用的主控制器為TMS320F2812型號,該型號屬于TI公司制作得到的數字信號處理器,其主要功能則是處理與讀取傳由傳感器直接輸入得到的四旋翼飛行器姿態數據,同時與控制目標相結合,通過PID控制器,完成PWM波的輸出工作,進而達到懸停控制的目的.整個結構使用的時鐘頻率為150MHz,進而能夠進一步確保數據處理本身具備的實時性;通過成本相對較低的MEMS慣性測量單元能夠針對四旋翼飛行姿態展開進一步測量工作.在大多數環境中,IMU主要包含三軸陀螺儀以及三軸加速器等兩部分.在IMU展開輸出處理的過程中,就能夠快速得到四旋翼飛行器空間姿態角.因為單一傳感器開展測量,其得到的誤差也相對較低,所以可以通過卡爾曼濾波進一步完成陀螺儀與加速度計的數據融合工作,進而使最終得到的姿態角更加準確.
1.1 DSP2812
四旋翼飛行器系統主要使用的數字信號處理器是由TI公司設計得到的32位定點運動控制器.其中使用的芯片相較于其他芯片而言處理速度更小、功耗也更小,且成本也更低.當前四旋翼飛行器完成控制的根本原理即為運用控制器,向外輸出PWM波形,進而影響直接電機輸出功率,如此就能夠有效控制電機轉速,并推動螺旋槳形成一個向上的力.因為整個過程存在較為明顯的滯后性,因此必須嚴格保證使用系統的實時性.若系統內核供電電壓等于1.9V時,那么相對應的時鐘頻率應該等于150MHz,此時整個指令使用的平均時間應該達到6.67ns.上述幾項數據完全可以達到四旋翼飛行器需要具備的實時性要求,進而保證數據處理與在線姿態估算等工作的完善.設計者為使四旋翼飛行器的底層外部資源與外部設備展開順利通訊,需要嚴格控制硬件資源,其中主要包括傳感器、PWM波形輸出結構以及數字接口的連接.
1.2 慣性測量單元
在大多數情況下,四旋翼飛行器中使用的慣性測量單元包含三軸螺旋儀與三軸加速計兩個部分.同時這兩個部分都是通過IIC 數字接口主控單元完成整個數據傳輸工作.MEMS相較于其他傳感器而言成本更低,同時也具備功耗與體積都偏小的優勢.此處提出的慣性測量單元最為根本的職能則是完成四旋翼飛行器對應姿態角相關數據的測量工作.但通過陀螺儀與加速度計得出的數據并不能直接算作為姿態角,而是需要部分學者通過測量得到數據進一步處理計算,才能夠得到最終姿態角.
1.3 無線傳輸
文章在對無線通信的核心模塊進行選擇時使用了nRF905,其自身組成包括晶振、數字接口、收發器等等,能夠最大程度上與外部主控制器實施交流或溝通,無線通信的任務主要為實現四旋翼飛行器與上位機之間的通信,隨著指令從上位機發出,經由四旋翼飛行器傳達到飛行器中.此外四旋翼飛行器可以有針對性的實現飛行的監督工作,并獲取對應的PID素質,將其反饋至主控板,并確保數據具備有效性,
2 懸停狀態動力學模型
四旋翼飛行器自身具備的控制系統主要與角矢量、姿態矢量以及位置矢量等多個變量存在關系,為了進一步將四旋翼飛行器的動力學模型中有關各個變量之間的關系展現出來,需要有針對性地對定義或坐標系的合適程度進行控制,以實現系統狀態方程在描述過程中的簡單化,便于今后對該系統實施進一步研究.下圖為飛行器的具體機構模型圖.
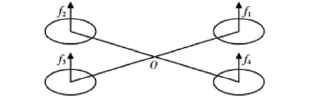
圖1 四旋翼飛行器結構模型
上圖顯示,四旋翼飛行器在實際運作過程中,往往需要引用兩個坐標性,包括機體、慣性兩個坐標系.將上述坐標系獲取到之后,能夠將兩者之間結合得出的轉換余弦矩陣;在現有的坐標系基礎上,結合歐拉-拉格朗日方程,得到懸停狀態下的四旋翼飛行器動力學模型.在這一狀態下,飛行器自身質量分布具備一定的均勻性,進而得出對應的動力模型:
在上述公式中,ψ、θ、φ表示的含義分別為偏航角、俯仰角以及歐拉角滾轉角;而Tψ、Tθ、Tφ表示的含義為其對應家的外部轉矩;fi表示的含義為各個不同旋翼產生的具體升力,此處i可以等于1,2,3,4.
3 基于卡爾曼濾波的PID控制
單一化傳感器所具備的精準度與現有的需求較為相符,但該過程中噪聲導致的影響無法徹底消除.一旦出現噪聲對其設備進行干擾,會直接影響傳感器數據傳輸時的精準度并導致其發生變化.因此為使得傳感器數據傳輸行為能夠具備優質水平,一個較為有效、簡單的方式即為融合傳感器數據,這一方式能夠使數據結果更加真實.針對當前實施的數據處理行為而言,該過程中包含了數據傳遞、獲取、輸入、融合、姿態估算等多個環節內容.此外基于傳感器得到的數據信息在平均濾波器的作用下使噪音不斷減少,進而實現下一步處理與校正行為,而結合卡爾曼濾波的數據融合措施能夠最大程度上確保并提升整體精準度.
3.1 卡爾曼濾波
對于常規使用的陀螺儀而言,雖然其具備優質化性能,能夠最大程度上將動態化的設備角度變化瞬間捕捉,并不被加速度這一變化影響,但因其本身具備溫度、特性、積分等多個層面的影響,多存在漂移誤差,所以無法維持長時間、不間斷的獨立性作業;而加速度計具備較為優質的靜態響應能力,能夠有效控制靜態角度,但會因加速度的大小發生一定變化,與跟蹤動態角度運動存在一定的差距.因此為了進一步彌補兩種設備間存在的差距以及動態化誤差,需要另外選擇更為優質的姿態角.
針對現有的卡爾曼濾波器處理過程而言,其數據處理行為是經由更新、預測兩個行為共同構成.其中預測行為需要結合上一階段的情況得出當前應呈現的狀態;而更新行為則是通過評估過去以及當前呈現狀態的綜合,得到未來一刻時間內應呈現的一種預測性狀態.就四旋翼飛行器而言,姿態預測行為的重點在于不同離散時間處理過程中,結合陀螺儀具備的加速度、角速度值得出一個相對數值,以獲取最適宜的姿態角,由于飛行器姿態估計方式自身存在的差異性,直接導致性能評價原則存在一定的差距,而卡爾曼濾波則是其中誤差最小的方式之一.
3.2 姿態角PID控制
本次研究的重點在于懸停狀態下的四旋翼飛行器姿態角的測量,在此狀態下,需要將外界干擾因素除去,得到姿態角與輸入值之間的比值,目前研究內容包含了(ψ、θ、φ)=0.
經由對四旋翼飛行器自身機身角度的調節,控制在5度并維持不變,使四個電機運轉速度保持一致.基于動態環境,得到對應的加速度計以及卡爾曼濾波器測得的姿態角數值.而下圖2中的a,b,c分別代表了系統產生噪音的加速度計姿態角、陀螺儀姿態以及卡爾曼濾波處理后的姿態角.結合有關文獻資料發現,卡爾曼濾波器對陀螺儀、加速度計姿態角的消除作用極為有效,確保PID控制器得到數據的真實性并有效降低影響.
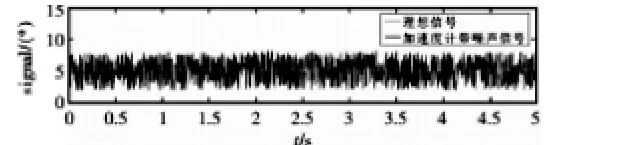
圖2(a) 噪聲加速度計姿態角

圖2(b) 噪聲陀螺儀姿態角

圖2(c) 卡爾曼濾波后姿態角
當輸入信息以階躍信號為主時,結合Z變換實現對象離散化,同時將其用離散狀態方程表示出來,并在其中加入卡爾曼濾波器前后輸出,得到其曲線圖形.進而能夠得到在卡爾曼濾波的作用下,能夠有效得促使系統的放映速度與穩定性得到提升.
結語
綜合文章內容,基于單一傳感器進行四旋翼飛行器姿態的精準性測量,結果顯示仍存在較多問題,為此文章合理應用卡爾曼濾波器算法實現了陀螺儀輸出姿態角、加速度計兩者的融合,進一步規避單一傳感器產生的測量精準缺乏這一問題,與四旋翼飛行器的動力學模型集合,設計并構建了仿真PID控制其,并對系統性傳遞函數進行明確.隨后以Matlab為基礎完成有關措施,而PID仿真行為的結果這些年,卡爾曼濾波實現后可促使PID的穩定性、速度不斷提升,確保今后與四旋翼飛行器有關的研究具備一定的理論基礎.
〔1〕張鵬杰,邱衛寧,侯賀平,等.總體最小二乘求取AR(1)模型參數[J].測繪信息工程,2012,37(3):1-8.
〔2〕王學斌,徐建宏,張章.卡爾曼濾波器參數分析與應用方法研究[J].計算機應用與軟件,2012,29(6):212-215.
〔3〕江杰,朱君,豈偉楠.四旋翼無人飛行器姿態數據采集處理系統[J].計算機測量與控制,2012,20(6):1703-1706.
V249.1
A
1673-260X(2017)04-0012-02
2017-01-13
1.2016年度安徽省科技重大專項項目(16030901029);2.《高等職業教育創新發展行動計劃(2015-2018年)》任務和項目承接(RW-38,XM-06)
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年12期)2018-11-25 09:37:34
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
