基于ADAMS的車(chē)輛轉(zhuǎn)向桿系動(dòng)態(tài)仿真分析
2017-05-13 08:54:39趙萍徐秀
汽車(chē)實(shí)用技術(shù) 2017年8期
趙萍,徐秀
(陜西重型汽車(chē)有限公司,陜西 西安 710200)
基于ADAMS的車(chē)輛轉(zhuǎn)向桿系動(dòng)態(tài)仿真分析
趙萍,徐秀
(陜西重型汽車(chē)有限公司,陜西 西安 710200)
利用proe對(duì)新開(kāi)發(fā)的沙漠車(chē)轉(zhuǎn)向桿系進(jìn)行三維建模,并將其轉(zhuǎn)換至MSC.ADAMS軟件中,利用ADAMS/View模塊建立一套轉(zhuǎn)向桿系運(yùn)動(dòng)仿真模型。通過(guò)動(dòng)態(tài)仿真,分析轉(zhuǎn)向桿系的運(yùn)動(dòng)軌跡,輸出轉(zhuǎn)向橋搖臂的擺角變化曲線,確定轉(zhuǎn)向橋最大內(nèi)外轉(zhuǎn)角,計(jì)算出車(chē)輛的最小轉(zhuǎn)彎半徑,為沙漠車(chē)轉(zhuǎn)向系的設(shè)計(jì)提供指導(dǎo)和可靠的理論依據(jù)。
ADAMS;轉(zhuǎn)向桿系;仿真;最小轉(zhuǎn)彎半徑
CLC NO.:U461.9 Document Code: A Article ID: 1671-7988 (2017)08-100-03
前言
隨著國(guó)內(nèi)外汽車(chē)行業(yè)的不斷發(fā)展,車(chē)輛設(shè)計(jì)水平也不斷提高。尤其在近幾十年間計(jì)算機(jī)技術(shù)的日臻成熟,為車(chē)輛設(shè)計(jì)的縱深發(fā)展奠定了基礎(chǔ)。目前,三維CAD軟件已經(jīng)被廣泛應(yīng)用到車(chē)輛設(shè)計(jì)中,而先進(jìn)的CAE軟件應(yīng)用也逐漸在車(chē)輛行業(yè)中展開(kāi)。
作者在近期的新型沙漠車(chē)開(kāi)發(fā)設(shè)計(jì)過(guò)程中,為了滿足所設(shè)計(jì)沙漠車(chē)使用路況特殊性以及整車(chē)布置合理性的要求,設(shè)計(jì)開(kāi)發(fā)出橫置拉桿轉(zhuǎn)向桿系。但在proe中無(wú)法判定該轉(zhuǎn)向桿系的運(yùn)動(dòng)軌跡和轉(zhuǎn)向橋的最大內(nèi)外轉(zhuǎn)角,CAD軟件在一定程度上已經(jīng)無(wú)法滿足仿真功能需要,只能求助于多體系統(tǒng)動(dòng)力學(xué)仿真軟件ADAMS。
1、轉(zhuǎn)向桿系模型導(dǎo)入
ADAMS軟件是美國(guó)MDI公司開(kāi)發(fā)的機(jī)械系統(tǒng)動(dòng)力學(xué)仿真分析軟件,能對(duì)虛擬機(jī)械系統(tǒng)進(jìn)行靜力學(xué)、運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析,輸出位移、速度、加速度和反作用力曲線。具有強(qiáng)大的仿真分析能力,但對(duì)于復(fù)雜的零部件和含有較多組件的裝配體,其三維造型能力稍顯不足,采用ADAMS/View 不能很好地將其特征表達(dá)出來(lái)。因此,對(duì)于結(jié)構(gòu)復(fù)雜的機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析時(shí),常采用CAD軟件與ADAMS軟件相互輔助的方式進(jìn)行,即利用CAD軟件進(jìn)行三維設(shè)計(jì)、裝配,然后將設(shè)計(jì)好的模型以一定的格式導(dǎo)入ADAMS,再進(jìn)行運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)的仿真分析。本文選用proe作為轉(zhuǎn)向桿系三維建模的CAD軟件。
轉(zhuǎn)向桿系模型包括多個(gè)零部件,具體包括:轉(zhuǎn)向器、轉(zhuǎn)向搖臂、轉(zhuǎn)向橫拉桿、轉(zhuǎn)向橋搖臂、轉(zhuǎn)向橋主銷(xiāo)和轉(zhuǎn)向梯形等。為了簡(jiǎn)化模型,提高分析速度,簡(jiǎn)化主銷(xiāo)與轉(zhuǎn)向搖臂連接部件。將三維裝配模型以parasolid格式導(dǎo)入ADAMS/View,為了使導(dǎo)入模型各部件之間實(shí)現(xiàn)其獨(dú)立性,應(yīng)分別將各部件轉(zhuǎn)換成parasolid格式,且與轉(zhuǎn)換后的裝配模型保存在同一個(gè)文件夾下。最終導(dǎo)入的三維轉(zhuǎn)向桿系模型如圖1所示,轉(zhuǎn)換后導(dǎo)入ADAMS的模型會(huì)丟失其自身相關(guān)參數(shù),且不能進(jìn)行參數(shù)化計(jì)算,無(wú)法修改構(gòu)件的幾何尺寸。因此,在轉(zhuǎn)換之前應(yīng)先確定模型準(zhǔn)確無(wú)誤,避免再次修改。
將模型從proe導(dǎo)入ADAMS時(shí)保證屬性單位的統(tǒng)一,導(dǎo)入后的轉(zhuǎn)向桿系模型缺少零部件的相關(guān)屬性,需要通過(guò)Modify命令添加或修改各個(gè)構(gòu)件的質(zhì)量值(Mass)和質(zhì)心轉(zhuǎn)動(dòng)慣量值(Ixx、Iyy、Izz),這些屬性在pore軟件中都可以計(jì)算出來(lái)。
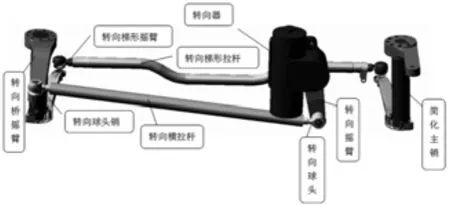
圖1 轉(zhuǎn)向拉桿裝配圖
2、ADAMS約束施加
從proe導(dǎo)入ADAMS中的模型僅僅是一些零散的部件,其之間不存在任何連接關(guān)系,需通過(guò)ADAMS的約束功能建立起各部件之間的約束關(guān)系,使其能真實(shí)反映各部件之間的運(yùn)動(dòng)關(guān)系。該轉(zhuǎn)向拉桿機(jī)構(gòu)之間的約束關(guān)系見(jiàn)下表1。
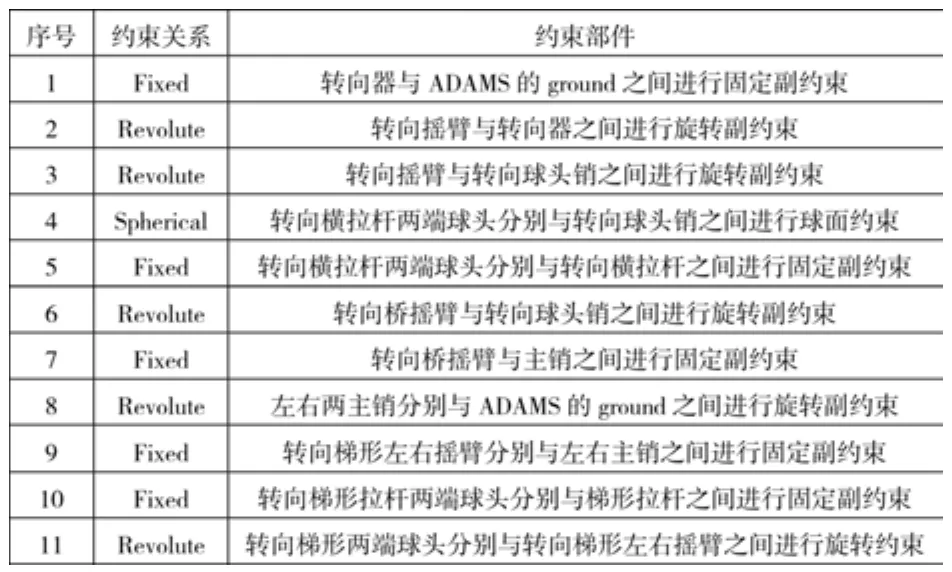
表1 轉(zhuǎn)向拉桿各部件約束關(guān)系表
通過(guò)以上約束建立轉(zhuǎn)向桿系各部件之間的連接關(guān)系,還需對(duì)相關(guān)構(gòu)件施加載荷,以確定零部件之間的相互作用。
3、ADAMS載荷施加
ADAMS的載荷力包括外部載荷和內(nèi)部載荷,該轉(zhuǎn)向桿系中的外部載荷主要包括重力和前橋滿載壓力,內(nèi)部載荷主要包括接觸力。
由整車(chē)匹配決定該沙漠車(chē)滿載時(shí)的前橋載荷,計(jì)算出轉(zhuǎn)向所需最大扭矩,由該參數(shù)初步確定轉(zhuǎn)向器。本文分析在所選轉(zhuǎn)向器最大壓力、流量等各參數(shù)符合要求情況下,轉(zhuǎn)向橋能正常轉(zhuǎn)向時(shí)轉(zhuǎn)向拉桿的運(yùn)動(dòng)軌跡。故該仿真分析中的外載荷只考慮重力作用,對(duì)于重力的施加,利用Settings/Gravity命令直接設(shè)定重力加速度,注意所施加重力加速度的方向,該重力被直接施加在各部件上。
對(duì)于所要分析的轉(zhuǎn)向桿系內(nèi)部載荷只有接觸力,且發(fā)生在轉(zhuǎn)向橫拉桿兩端球頭與轉(zhuǎn)向搖臂和轉(zhuǎn)向橋搖臂接觸部位。該接觸對(duì)轉(zhuǎn)向桿系在運(yùn)動(dòng)過(guò)程中轉(zhuǎn)向球頭擺角起到了一定的限位作用,將轉(zhuǎn)向球頭在球面內(nèi)的最大擺角控制在最大值17.5°以內(nèi),決定著轉(zhuǎn)向桿系設(shè)計(jì)是否合理,仿真是否成功。在接觸施加過(guò)程中應(yīng)避免發(fā)生穿透現(xiàn)象,可通過(guò)增加時(shí)間步長(zhǎng)的方法予以改進(jìn)。
4、ADAMS驅(qū)動(dòng)施加
在對(duì)轉(zhuǎn)向桿系進(jìn)行驅(qū)動(dòng)前應(yīng)先施加驅(qū)動(dòng),考慮施加在方向盤(pán)上的力通過(guò)轉(zhuǎn)向操縱機(jī)構(gòu)傳到轉(zhuǎn)向器,再通過(guò)轉(zhuǎn)向搖臂輸出,從而帶動(dòng)轉(zhuǎn)向桿系運(yùn)動(dòng)。在仿真時(shí)可以單純?cè)谵D(zhuǎn)向搖臂與轉(zhuǎn)向器輸出軸轉(zhuǎn)動(dòng)處施加轉(zhuǎn)動(dòng)驅(qū)動(dòng),模擬轉(zhuǎn)向器輸出端轉(zhuǎn)動(dòng)帶動(dòng)轉(zhuǎn)向搖臂擺動(dòng)。將驅(qū)動(dòng)施加在轉(zhuǎn)向搖臂與轉(zhuǎn)向器輸出軸處的旋轉(zhuǎn)約束上,轉(zhuǎn)動(dòng)驅(qū)動(dòng)施加對(duì)話框如下圖所示。

圖2
所設(shè)置Function函數(shù)為30.0d*time,轉(zhuǎn)向搖臂以30°/s的轉(zhuǎn)速旋轉(zhuǎn),帶動(dòng)轉(zhuǎn)向桿系運(yùn)動(dòng)。
5、結(jié)果分析
通過(guò)對(duì)轉(zhuǎn)向桿系的運(yùn)動(dòng)進(jìn)行動(dòng)態(tài)仿真分析,清楚轉(zhuǎn)向桿系的運(yùn)動(dòng)軌跡。同時(shí)通過(guò)仿真結(jié)束后的動(dòng)畫(huà)回放方式可以清楚看到仿真任意時(shí)刻各轉(zhuǎn)向拉桿之間的相互運(yùn)動(dòng)關(guān)系。由仿真動(dòng)畫(huà)可知,隨著轉(zhuǎn)向搖臂的轉(zhuǎn)動(dòng)帶動(dòng)轉(zhuǎn)向橫拉桿運(yùn)動(dòng),橫拉桿帶動(dòng)轉(zhuǎn)向橋搖臂轉(zhuǎn)動(dòng),轉(zhuǎn)向主銷(xiāo)隨之轉(zhuǎn)動(dòng),帶動(dòng)一邊車(chē)輪轉(zhuǎn)動(dòng),同時(shí)轉(zhuǎn)向梯形運(yùn)動(dòng),最終推動(dòng)另一邊車(chē)輪轉(zhuǎn)動(dòng),實(shí)現(xiàn)整車(chē)轉(zhuǎn)向。轉(zhuǎn)向橫拉桿兩端球頭與球頭主銷(xiāo)之間為球面連接,在轉(zhuǎn)向過(guò)程中,兩端球頭與轉(zhuǎn)向搖臂和轉(zhuǎn)向橋搖臂之間出現(xiàn)偏轉(zhuǎn)角度,由于接觸的施加,約束其圍繞球頭銷(xiāo)的球面偏轉(zhuǎn)角度在17.5°以內(nèi)。
由所設(shè)計(jì)沙漠車(chē)整車(chē)匹配初步?jīng)Q定所選用轉(zhuǎn)向器種類(lèi),使所選用轉(zhuǎn)向器滿足整車(chē)滿載時(shí)前橋最大載荷和轉(zhuǎn)向管路所需油壓要求。本設(shè)計(jì)所選用轉(zhuǎn)向器傳動(dòng)比為23:1,所設(shè)計(jì)轉(zhuǎn)向?yàn)榉较虮P(pán)左打2圈,右打2.5圈。當(dāng)方向盤(pán)轉(zhuǎn)到左右極限位置時(shí),傳遞到轉(zhuǎn)向器轉(zhuǎn)向搖臂上,其左右最大擺角分別為31.3°和39.13°。在30°/s的旋轉(zhuǎn)驅(qū)動(dòng)下,分別設(shè)置左右擺動(dòng)仿真時(shí)間為1.034s和1.304s。轉(zhuǎn)向桿系左右轉(zhuǎn)向運(yùn)動(dòng)情況如下圖所示。
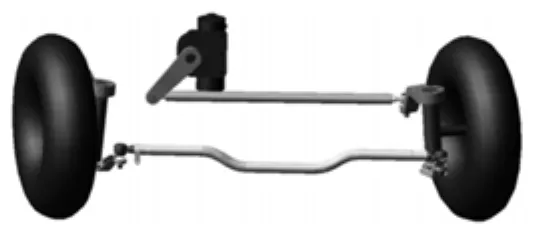
圖3 左轉(zhuǎn)極限位置

圖4 右轉(zhuǎn)極限位置
為了便于觀察轉(zhuǎn)向橋搖臂隨轉(zhuǎn)向桿系運(yùn)動(dòng)的擺角變化情況,本仿真設(shè)置用于測(cè)量轉(zhuǎn)向橋搖臂擺角的測(cè)量體,顯示在轉(zhuǎn)向過(guò)程中轉(zhuǎn)向橋搖臂轉(zhuǎn)角隨時(shí)間變化曲線圖。測(cè)量結(jié)果如下圖所示。

圖5 轉(zhuǎn)向橋最大內(nèi)轉(zhuǎn)角
由圖5可看出,隨著方向盤(pán)左右轉(zhuǎn)動(dòng),轉(zhuǎn)向橋搖臂隨之左右擺動(dòng),當(dāng)左轉(zhuǎn)2圈時(shí)其最大外轉(zhuǎn)角為25.46°,右轉(zhuǎn)2.5圈時(shí)其最大內(nèi)轉(zhuǎn)角為34.04°。
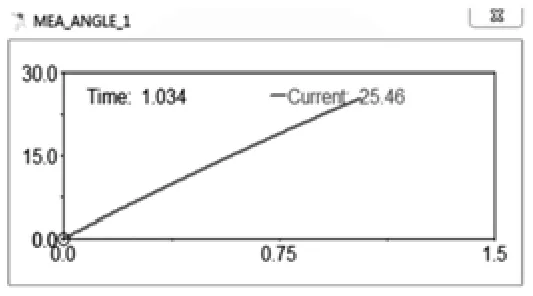
圖6 轉(zhuǎn)向橋最大外轉(zhuǎn)角
在分析得出最大內(nèi)外轉(zhuǎn)角的情況下,由公式:
已知所設(shè)計(jì)沙漠車(chē)前橋主銷(xiāo)的延長(zhǎng)線與地面的交點(diǎn)到前輪中心線的距離r為225mm,軸距L為3800mm,兩主銷(xiāo)中心線延長(zhǎng)線到地面交點(diǎn)之間的距離K為1670mm。最小轉(zhuǎn)彎半徑分析,內(nèi)輪最大轉(zhuǎn)角θimax為34.04°,外輪最大轉(zhuǎn)角θomax為25.46°。可求出所設(shè)計(jì)沙漠車(chē)的最小轉(zhuǎn)彎半徑Rmin。
6、結(jié)語(yǔ)
通過(guò)對(duì)所設(shè)計(jì)沙漠車(chē)轉(zhuǎn)向桿系進(jìn)行ADAMS動(dòng)態(tài)仿真分析,可以清晰地展現(xiàn)出轉(zhuǎn)向桿系的運(yùn)動(dòng)軌跡以及輸出轉(zhuǎn)向橋搖臂擺角變化曲線圖。在設(shè)定方向盤(pán)左右轉(zhuǎn)動(dòng)圈數(shù)前提下,能夠分析出轉(zhuǎn)向橋的最大內(nèi)外轉(zhuǎn)角,從而計(jì)算出所設(shè)計(jì)車(chē)輛的最小轉(zhuǎn)彎半徑,為轉(zhuǎn)向系的設(shè)計(jì)提供指導(dǎo)和可靠的理論依據(jù)。
[1] 王華斌,郝守海.基于ADAMS的客車(chē)側(cè)艙門(mén)動(dòng)態(tài)仿真分析.中國(guó)客車(chē)學(xué)術(shù)年會(huì)論文集.2011年.
[2] 石博強(qiáng),申焱華等.ADAMS基礎(chǔ)與工程范例教程.中國(guó)鐵道出版社.2007年11月.
[3] 王望予,張建文等.汽車(chē)設(shè)計(jì).機(jī)械工業(yè)出版社.2008年4月第4版.
Vehicle steering bar system based on ADAMS dynamic simulation analysis
Zhao Ping, Xu Xiu
( Shaanxi heavy-duty truck co., LTD., Shaanxi Xi'an 710200 )
Use the proe to design the three-dimensional model of streeing system of the new developing desert car, which is transformed into the software of MSC. ADAMS. Use the module of ADAMS View to make the set of steering system motion simulation models. Through the dynamic simulation, analysis the trajectory of streeing system. Export the curve of the swing angle of the streeing axle rocker, determine the max inside and outside swing angle of the steering axle rocker, then calculate the min turning radius.To provide guide and theoretical basis of the developing of the desert car streeing system.
ADAMS; streeing system; simulation; the min turning radius
U461.9
A
1671-7988 (2017)08-100-03
趙萍(1985-),女,助理工程師,就職于陜西重型汽車(chē)有限公司。從事車(chē)輛產(chǎn)品研發(fā)工作。
10.16638/j.cnki.1671-7988.2017.08.034
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
