汽車電動助力轉向系統硬件在環仿真及實車驗證
2017-05-13 08:54:54孟慶健丁玲
汽車實用技術 2017年8期
孟慶健,丁玲
(安徽江淮汽車股份有限公司技術中心,安徽 合肥 230601)
汽車電動助力轉向系統硬件在環仿真及實車驗證
孟慶健,丁玲
(安徽江淮汽車股份有限公司技術中心,安徽 合肥 230601)
一款汽車的電動助力轉向系統開發成功與否控制策略的設計是關鍵,因其影響整車的操縱穩定性,安全舒適性等人們關注的性能,如果能夠實現在開發初期對設計的控制策略進行硬件在環測試然后根據仿真的結果進行調整控制策略,樣件制作后再進行實車驗證,可以避免設計彎路從而縮短開發周期和成本,這是進行電動助力轉向產品開發的新思路,對促進國內電動助力轉向行業的發展和提高我國汽車行業競爭力都具有重要的意義。
電動助力轉向(EPS);硬件在環仿真;實車驗證
CLC NO.:U463.4 Document Code: A Article ID: 1671-7988 (2017)08-146-05
引言
隨著現代汽車的技術進步和發展,動力轉向系統經歷了分別以液壓助力、電控液壓助力、電動助力的發展階段。與液壓助力和電控助力相比,電動助力轉向系統具有能耗低、結構緊湊、易于裝配的優點,是未來汽車動力轉向系統的發展方向之一[1]。汽車的轉向系統對操縱穩定性、行駛安全性和舒適性有較大的影響。前期汽車的轉向系統是沒有任何動力裝置的,動力源完全依靠駕駛員手力來實現轉向,為了減輕駕駛員負擔,同時也考慮到有駕駛安全性,人們發明了轉向助力系統,經歷從液壓助力轉向,電控液壓助力轉向、電動助力轉向系統(Electric Power Steering System簡稱EPS)[2]。
國內轉向系統的供應商加大對EPS系統的研究[3],但對控制策略等關鍵技術上都沒有突破性的進展,如轉向的快速響應、轉向盤的擺振及回正和阻尼控制等,系統開發出來后在主機廠整車上試驗還是存在很多問題,總體性能不能滿足主機廠的需求。本文介紹了一款電動助力轉向的測控臺,可以預先在臺架上實現對設計的控制策略中的助力特性,穩態回轉等性能進行硬件在環仿真試驗,達到提前驗證EPS系統控制策略的工作性能,再通過對實車EPS控制策略的轉向輕便性及回正等性能的驗證,縮短開發周期和成本。
1、測控臺功能概述
本文介紹的測控臺可以實現分別針對基于有刷直流電機以及永磁同步電機兩種電動助力轉向(EPS)系統管柱總成的包括故障性能工作性能及硬件在環測試等三大功能。
a.故障測試:供電電壓、轉矩、點火、車速/發動機轉速信號燈等的故障測試
b.工作性能:助力特性、空載轉動力矩特性、逆向轉動力矩特性等在內的工作性能測試。
c.硬件在環測試:穩態回轉、轉向回正等在內的硬件在環測試。
測控臺測試環境采用的是LabVIEW,各功能的測試程序以子程序的形式被測控主程序調用,測控臺如圖1,測控界面如圖2。在測試主程序中通過對菜單欄中不同測試項的選擇,調用對應的測試程序,測試結束后,退出當前測試界面回到測試主界面等待下一項測試,程序結構整潔清晰。

圖1 測控臺的搭建圖

圖2 測控臺操作界面
2、測控臺用法概述
2.1 機械硬件調節
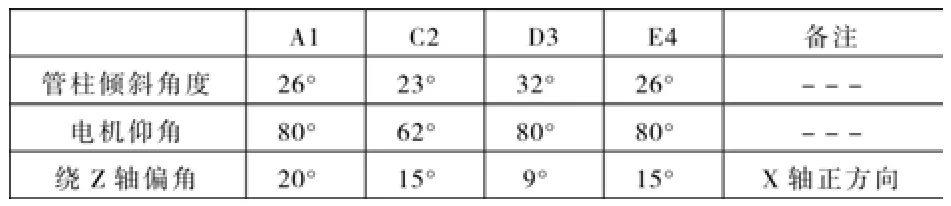
表1 多種管柱總成安裝角度明細
實際生產中,某一車型配置的多樣化使得其安裝的EPS系統信號類型、機械結構以及性能參數不盡相同,故在測控平臺的硬件設計方面,為盡可能拓展測控平臺的應用范圍,同時,模擬實車上EPS總成的安裝狀態參數,設計了可安裝多種EPS總成的萬向調節機構。表1為統計的多種管柱總成安裝角度明細。
2.2 硬件信號分配
測控臺信號處理部分采用數據采集卡和CAN通訊卡,數據采集卡使用了模擬量采集通道,模擬量發送通道,計數器端口以及數字端口。
2.3 負載電機配置
負載電機共有位置模式、速度模式以及轉矩模式三種工作模式,通過手動操作伺服控制器面板的方法切換三種工作模式;而根據速度控制的內/外指令不同,轉矩模式又可以細分為轉矩_內部速度控制模式以及轉矩_外部速度控制模式,在設計的測試功能中,共用到的負載電機工作模式為:速度模式、轉矩_內部速度控制模式以及轉矩_外部速度控制模式。速度模式表示負載電機按照速度指令模擬量信號進行指定轉速的工作(此時轉動力矩不受控),轉矩_內部速度控制模式表示按照轉矩模擬量信號進行指定轉矩的轉動(此時轉速不受控),轉矩_外部速度控制模式表示按照轉矩模擬量信號指定的轉矩以及轉速模擬量信號指定的轉速進行轉動(此時轉矩、轉速均受控)。不同測試功能中負載電機詳細的工作模式分配見表2所示。
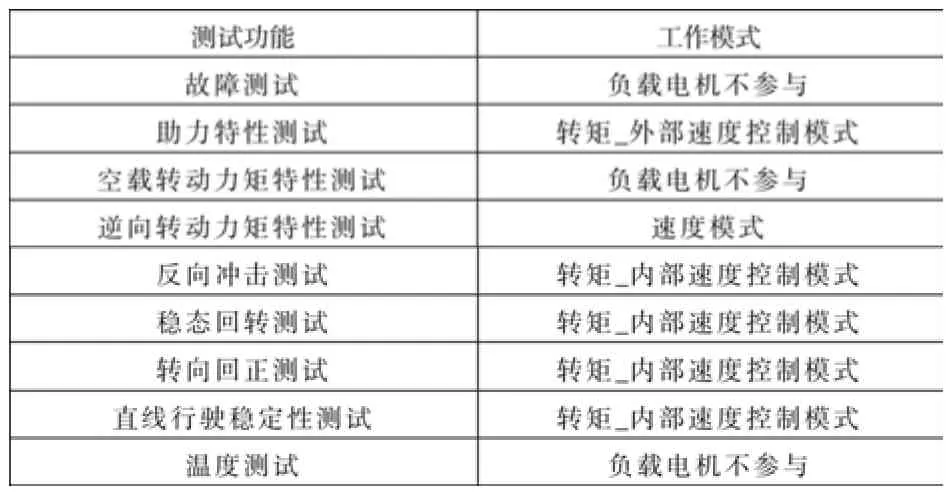
表2 負載電機在不同測試功能下工作模式
2.4 模擬測試
2.4.1 故障模擬測試

圖3 故障模擬測試原理
通過數據采集卡在線控制可編程電源的輸出電壓,即EPS的工作電壓,同時,模擬實車工況發送EPS正常工作需要的車速、發動機轉速、ABS輪速、ABS校驗、檔位、油門、制動等方波/模擬量/CAN信號,并結合自定義的轉向盤操縱力矩信號一同注入EPS控制器,實現EPS脫離實車環境后正常的工作性能,通過對目標信號加入幅值、頻率亦或是占空比等故障特征,同時,接收EPS控制器反饋回的狀態代碼,以實現EPS在單/多變量信號故障工況下狀態代碼及工作性能的監視。
2.5 性能測試
2.5.1 助力特性測試
本EPS測控臺擬采用“電機堵轉”方法實現對有刷/無刷EPS助力特性的測試,具體方法是:斷掉管柱總成中轉矩傳感器同控制器之間的電氣連接,通過工控機控制數據采集卡模擬發送EPS正常工作所需的轉向盤操縱力矩信號以及車速、發動機轉速、ABS輪速、ABS校驗等實車信號環境。同時,在線控制與管柱輸出端固定連接的伺服電機為轉矩模式,速度指令設置為外部模擬量控制(模擬量設置為0),此時的伺服電機等效于轉速為0的制動器。在轉向盤操縱力矩信號由0逐漸加載至峰值的過程中,伺服電機始終保持零速的制動狀態,此時,實時采集伺服電機輸出的轉矩信號,該轉矩就是EPS助力電機輸出的助力轉矩,最后繪制轉向盤操縱力矩同助力轉矩的相關性圖線便得到助力特性曲線。
2.5.2 空載轉動力矩特性測試
空載轉動力矩特性測試中,在EPS管柱總成機械以及電氣完整性的前提下,通過數據采集卡模擬發送EPS正常工作所需車速、發動機轉速、ABS輪速、ABS校驗等實車信號環境,斷掉管柱輸出端的伺服電機的電源(此項測試中伺服電機不參與),操作者由轉向盤中位順時針/逆時針勻速轉動轉向盤至極限位置后再反向轉動至極限位置,最終回正至轉向零位,在整個轉動過程中,通過數據采集卡實時采集管柱總成中的轉矩傳感器信號,通過CAN卡實時采集EPS控制器輸出的轉向盤轉角信號,并對轉向盤轉角及轉矩信號進行相關性圖線的繪制,得到EPS管柱總成在輸出端空載工況下的力矩隨轉角變化特性的曲線。
2.5.3 逆向轉動力矩特性測試
逆向轉動力矩的測試中, 同樣在保證EPS管柱總成機械以及電氣完整性的前提下,通過數據采集卡模擬發送EPS正常工作所需車速、發動機轉速、ABS輪速、ABS校驗等實車信號環境,同時,通過數據采集卡控制伺服電機為速度模式,此模式下,伺服電機以設定的轉速帶動管柱總成勻速轉動。測試中,通過控制伺服電機使轉向盤由中位順時針/逆時針勻速轉動至極限位置后再反向轉動至極限位置,最終回正至轉向零位,在整個轉動過程中,通過數據采集卡實時采集管柱總成中的轉矩傳感器信號,通過CAN卡實時采集EPS控制器輸出的轉向盤轉角信號,并對轉向盤轉角及轉矩信號進行相關性圖線的繪制,得到EPS管柱總成在輸入端空載工況下的逆向力矩隨轉角變化特性的曲線。
2.5.4 反向沖擊測試
同上述的逆向轉動力矩測試原理類似,反向沖擊測試測試中,在保證EPS管柱總成機械以及電氣完整性的前提下,通過數據采集卡模擬發送EPS正常工作所需車速、發動機轉速、ABS輪速、ABS校驗等實車信號環境,同時,通過數據采集卡控制伺服電機為轉矩模式,速度指令設置為內部控制,通過發送瞬時的脈沖方波/三角波轉矩模擬量給伺服電機,實現在輸出端對管柱總成施加沖擊力矩,通過數據采集卡實時采集、繪制沖擊前后的管柱總成中的轉矩信號以及轉向盤轉角信號隨時間的變化曲線。
2.6 硬件在環測試
硬件在環測試中,車速、發動機轉速、ABS輪速、ABS校驗、油門踏板、制動踏板等EPS工作需要的實車信號環境采用TESIS DYNAware中高精度的整車模型計算模擬,而諸如轉向盤轉角等EPS管柱總成的工作參數發送給TESIS DYNAware供車輛模型計算使用,同時,TESIS DYNAware的整車模型計算出的路面阻力發送給伺服電機用以模擬道路阻力,實現EPS的硬件在環測試,整個計算過程通過分頻技術實現車輛三維視角以及整車狀態參數的實時顯示。簡要工作流程如下:

硬件在環測控臺界面設計如圖4,動畫仿真場景如圖5;

圖4 硬件在環測控主界面
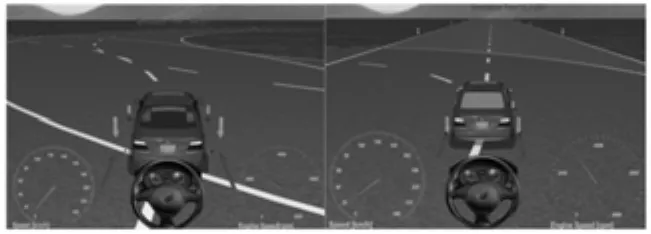
圖5 動畫仿真場景
硬件在環測試共包括穩態轉向、轉向回正以及直線行駛穩定性測試,不同的測試均在相同的測試程序界面下進行,需要保證EPS管柱總成原本的機械以及電氣完整。
2.6.1 穩態回轉測試
穩態回轉測試是用以測試EPS在車輛穩態轉向過程中的控制效果,其具體方法是:車輛由靜止啟動,順時針/逆時針轉動轉向盤至設定角度,使車輛連續緩慢地加速至目標橫向加速度后穩定行駛一周后,均勻減速至停車,最后轉向盤回正。記錄整個過程中包括轉向盤轉角、助力轉矩、操縱轉矩等臺架硬線信號以及包括側向加速度、車速等模型信號。
2.6.2 轉向回正測試
轉向回正測試是用以測試EPS在車輛低速/高速轉向行駛工況下,撒手回正過程中的控制效果。其具體方法是:車輛由靜止啟動,順時針/逆時針轉動轉向盤至設定角度,使車輛連續緩慢地加速至目標橫向加速度后穩定行駛設定時間后撒手轉向盤,記錄整個過程中包括轉向盤轉角、助力轉矩、操縱轉矩等臺架硬線信號以及包括側向加速度、車速等模型信號。
2.6.3 直線行駛穩定性測試
直線行駛穩定性測試是用以測試EPS在不同車速直線行駛工況下,撒手轉向盤后EPS保持車輛直線行駛的控制效果。其具體方法是:車輛由靜止啟動,保持轉向盤中位,使車輛連續緩慢地加速至目標車速穩定行駛設定時間后撒手轉向盤,撒手行駛設定時間后制動停車,轉向盤回正。記錄整個過程中包括轉向盤轉角、助力轉矩、操縱轉矩等臺架硬線信號以及包括側向加速度、車速等模型信號。
3、EPS實車試驗
3.1 實車試驗設備
試驗過程中用到的試驗設備有:試驗車、VB0X數據采集儀、轉向盤轉矩轉角測量儀、逆變器、蓄電池等。其中轉向盤轉矩轉角測量儀用于測量轉向盤的轉角值和作用在轉向盤上的轉矩值;VB0X數據采集系統是一種功能強大的儀器,可以通過衛星接收器來測量移動汽車的速度和橫向加速度等汽車行駛指標,同時也可以通過外接傳感器測量汽車加速度,轉向盤轉矩、轉角等數據。本文實車實驗主要通過VBOX外接模塊采集轉向盤轉角轉矩信號、汽車橫擺角速度信號。通過點煙器電源為VB0X數據釆集儀供電,通過蓄電池為EPS控制器及轉矩轉角數據轉換器供電。整個實車試驗系統如圖6所示。
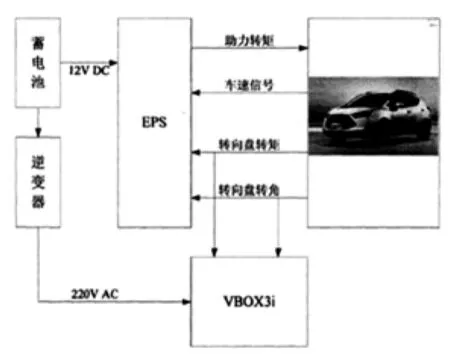
圖6 實車試驗系統
3.2 轉向實車試驗
3.2.1 轉向輕便性及實車試驗結果
參照國家標準GB/T 6323.5-94的轉向輕便性試驗規定[11][12],按照以下步驟進行轉向輕便性實車試驗,測試結果見表3:
1)如圖7所示的雙紐線畫好行駛軌跡,并將樁桶擺好;
2)安裝電動助力轉向的控制器、轉矩轉角測量儀等設備,工作溫度預熱至正常;
3)將試驗車停在雙紐線的原點處,車身方向為原點的切線方向,調整車輪到直行位置;
4)讓汽車以10km/h左右的速度按照雙紐線軌跡進行行駛。待駕駛員操作熟練,車速穩定之后,此時記錄轉向盤轉角值與作用在轉向盤上的轉矩值。
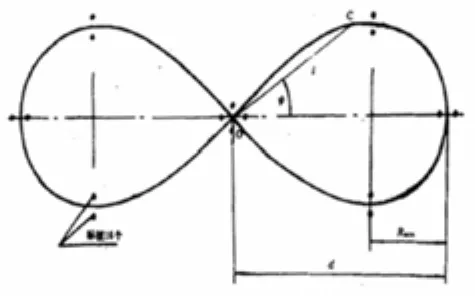
圖7 雙紐線行駛軌跡
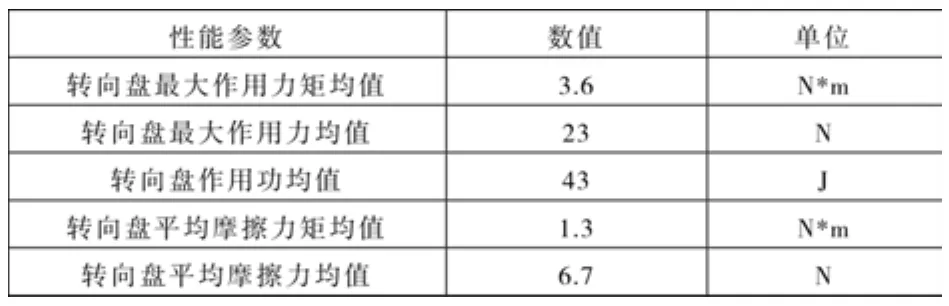
表3 轉向輕便性試驗結果
從數值得出轉向最大作用力矩均值為3.6Nm,屬于較輕便型手力設計。
3.2.2 助力特性及實車試驗結果
在曲線型助力目標電流模塊,設置以轉矩信號占空比的形式來控制目標助力電流,在原地情況下的最大目標電流設置為55A,在不同車速的情況下,最大的目標助力電流成線性遞減的方式,其具體設定值如圖8所示。
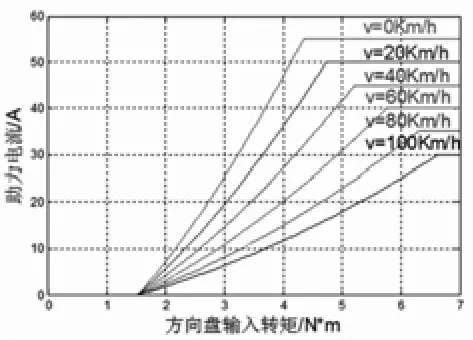
圖8 助力電流隨轉矩之間的變化關系
助力特性實車試驗結果,助力試驗的試驗現場圖如圖9所示。

圖9 實車試驗現場圖
原地助力實車試驗結果如圖10,從曲線上看出電機助力特性非常好,且波動較小,平均手力矩為3.3Nm左右,滿足≤4Nm的設計值要求。

圖10 原地助力實車試驗結果
3.2.3 回正特性及實車試驗結果
由車速20km/h得到的助力轉矩與轉角之間關系曲線見圖11,從曲線可以得出在測控臺上調試出來的回正性能較好,左轉和右轉轉向盤均可以回到中位,基本無殘余角,達到目標設計值的要求。
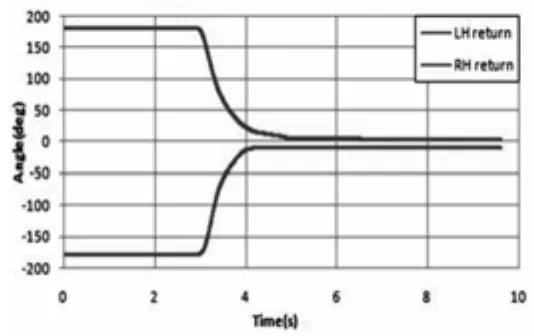
圖11 助力轉矩與轉角之間關系曲線
4、結論
本文介紹了一款電動助力轉向的測控臺,將設計的控制策略應用到開發的電機EPS控制器并進行了相關測試,可以預先在臺架上實現對控制策略中的助力特性,穩態回轉等性能進行硬件在環仿真試驗,達到提前驗證EPS系統控制策略的工作性能,再將轉向管柱帶電機控制器總成裝到實車上對轉向輕便性和回正及隨速助力等性能進行驗證,本文介紹的采用測控臺進行EPS硬件在環仿真的方法可以準確的實現車輛轉向操縱輕便性和回正等性能驗證,避免反復設計,縮短開發周期和成本。
[1] 謝林.汽車電動助力轉向助力特性研究[D].四川:西華大學,2012.
[2] 龐博.汽車電動助力轉向系統的研究與開發P].浙江:浙江大學,2010.
[3] 李書龍,許超,楊智. 汽車EPS硬件設計[J]. 機電工程,2004,21(1):5-7.
[4] 張云安,馬瑞卿,符向榮,等. EPS的設計與開發[J]. 計算機測量與控制,2005,13(6):551-552.
[5] 吳文江,郝金魁. 基于MC9S12DP256的EPS硬件設計[J]. 中國工程機械學報,2006,4(4):494-497.
[6] 李偉光,林穎,王元聰. 汽車EPS的硬件設計[J]. 華南理工大學學報(自然科學版),2006,34(2):52-56.
[7] 晉兵營,寧廣慶,施國標.汽車電動助力轉向系統發展綜述[J].拖拉機與農用運輸車,2010,37(1): 1-5.
[8] 鄧利軍.EPS系統控制策略仿真研究[D].西安:長安大學,2009.
[9] 田正新.汽車電動助力轉向控制策略的研究及聯合仿真分析[D].長沙:湖南大學,2012.
[10] 劉晶郁,王濤 基于轉角的商用車電動助力轉向回正控制研究[J].電子設計工程,2011,19(19): 92-94.
[11] GB/T 6323.5-94.汽車操縱穩定性試驗方法一轉向輕便性試驗[S].
[12] GB/T 6323.4-94.汽車操縱穩定性試驗方法一轉向回正性能試驗[S].
The auto EPS hardware in the loop simulation and real vehicle test
Meng Qingjian, Ding Ling
( Anhui Jianghuai Automobile Co., Ltd., Anhui Hefei 230601 )
a car of electric power steering system development the design of the control strategy is the key to success, because of the impact of vehicle handling stability, safety comfort people focus on performance, if can achieve at the beginning of the development to design the control strategy of hardware in loop test and adjust according to the result of the simulation control strategy of the reentry after samples are making real vehicle test and verify, can avoid detours and shorten the development cycle and cost, this is for electric power steering product development of new ideas, to promote the development of domestic electric power steering industry and enhance the competitiveness of China's automobile industry has important significance.
electric power steering(EPS); hardware in the loop simulation; real vehicle test and verify
U463.4
A
1671-7988 (2017)08-146-05
孟慶健(1980),男,本科,就職于安徽江淮汽車集團股份有限公司技術中心。
10.16638/j.cnki.1671-7988.2017.08.050
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
中國生殖健康(2019年3期)2019-02-01 06:12:26
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
