淺談工業機器人專業在高職院校的培養
2017-07-18 16:19:16丁鐸
山東工業技術 2017年14期
關鍵詞:高職院校
丁鐸
摘 要:工業機器人技術是結合了機械工程理論、控制理論、電氣工程技術、數學方法、計算機技術等多學科的高新技術的集合。隨著工業機器人技術的日趨成熟,該技術也成為一個衡量國家工業自動化水平的標志。近年來隨著我國經濟的轉型,工業機器人在制造業的應用也越來越廣泛,很多高職院校也相繼開設工業機器人技術專業。面對這樣的新興專業,本文將淺述該專業在高職院的培養及應用。
關鍵詞:高職院校;工業機器人;人才需求
DOI:10.16640/j.cnki.37-1222/t.2017.14.004
1 工業機器人的概念及分類
1961年美國Unimate公司生產了第一臺可用于上下料等簡單工作的商用工業機器人,標志著工業機器人誕生。直到80年代初,工業機器人技術才開始較快的發展。盡管工業機器人在工業領域應用廣泛,但各國對于工業機器人至今沒有統一定義,因此該部分將列舉不同工業機器人的定義及分類。
1.1 工業機器人的概念
在美國標準中,只有易于再編程的裝置才是機器人,而通過手動裝置或者固定順序的機器人都不認為是機器人,即通過人來驅動裝置或者需要安裝強制啟停驅動器才能運動且運動順序固定很難更改的都不認為是機器人。而在工業領域一些數控機床也可以實現編程后的功能實現,因此也要區分數控機床和工業機器人的區別。當一臺機械設備通過編程可實現多種用途則可能被稱作工業機器人,而當一臺設備通過編程只能執行同一類型任務的則稱為專用自動化設備。目前工業機器人的定義普遍形成以下基本論述:該設備可以將預先編排的程序存入存儲裝備,靠自身動力和控制能力來實現各種功能,且受人指揮,操作程序能自動重復的一種自動化設備。
1.2 工業機器人的分類
由于工業機器人沒有形成較為統一的定義,因此機器人的分類也不盡相同。不同國家、不同協會甚至不同企業分類方法也也有差異。根據日本工業機器人協會(the Japanese Industrial Robot Association, JIRA)的定義,將機器人分為六大類:分別是人工操作裝置、固定順序機器人、可變順序機器人、示教再現機器人 、數控機器人、智能機器人,而根據美國機器人協會( the Robotics Institute of America, RIA)的定義,只將以上最后四類認定為機器人裝置。而歐洲各個國家對機器人的定義分類表述各異。
目前,工業機器人根據其發展理論及運動控制分析大致分為四種形式。第一種是基于直角坐標系變換的機器人,該結構由三個獨立關節組成,運動相互獨立,沒有耦合,運動算法簡單且自身結構有很多限制,自由度不夠高。第二種是球坐標式機器人,該機器人工作空間大,占地面積小,但自身結構復雜。第三種是圓柱坐標是機器人,該機器人可進行空間上的上下及水平伸縮運動,具有較大的靈活性,但末端執行裝置由于受到自身結構的限制,精度不好控制。第四種是關節式機器人,這種機器人目前在工業領域中應用廣泛,一般由三個或三個以上的自由度組成。該機器人類似于人的上半身,具有運動靈活,結構緊湊的特點。
2 工業機器人在高職院校的培養
2.1 工業機器人專業在職業院校的培養目標
2000年我國工業機器人保有量僅為3500臺,而到了2013年我國機器人銷售量則高達3.6萬多臺一舉超越日本成為世界上工業機器人銷售市場占比最高的國家。2016年中國工業機器人市場需求增長至9.2萬臺。隨著我國人口紅利的消失以及“中國制造2025”、“智能轉型”的提出催生了工業機器人產業在我國的快速發展。在未來一段時間,機器人制造廠商及其集成商需要大量制造、設計集成、安裝調試、銷售及技術研發人員及服務人員。而機器人用戶也需要大量的工作人員進行日常的維護、調試與保養等工作。以上工作人員都是職業院校工業機器人專業的人才培養目標。由于職業院校受制于招生、科研等客觀因素的限制,且工業機器人是一個由多學科組成的高新技術,因此職業院校在人才培養上一方面要進行機器人的理論的學習,為今后在該領域發展的打好基礎,另一方面要將更多的教學精力集中在設備的維護、調試及簡單的維修等方面。
2.2 工業機器人專業在職業院校的培養內容
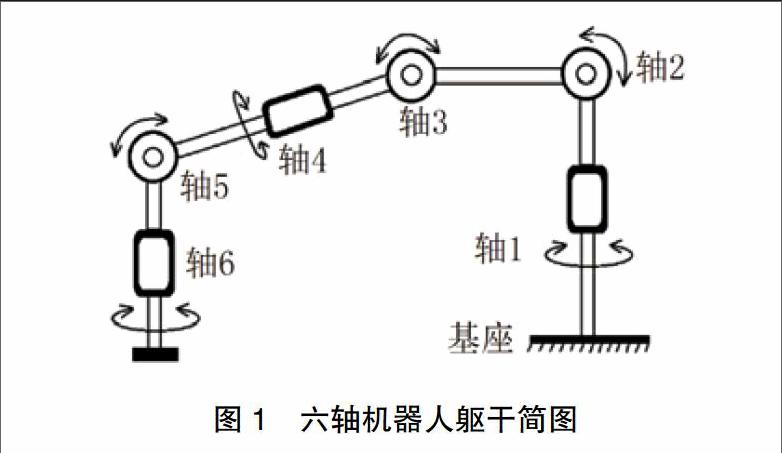
目前,我國工業機器人在眾多行業已經廣泛應用,尤其在沖壓、壓鑄、鍛造、機械加工、焊接、熱處理、噴涂、倉庫堆垛等工業環境中運用廣泛。傳統的工業機器人系統一般都包含機器人軀干、示教器編程器、機器人控制柜等。圖1為六軸機器人軀干簡圖,其中軸1、4、6為三個旋轉軸,每個軸由電機驅動并經過減速器減速來達到增大輸出扭矩進而來帶動各旋轉軸及其以后各部件繞該電機軸做旋轉運動,而根據功能的不同,軸6的末端執行器會安裝不同的設備,比如噴槍、焊槍、抓手等。軸2、3、5為擺動軸,由減速器連接電機進行驅動各關節部件進行運動。示教編程器是一個機器人控制系統的核心部件,是用來注冊和存儲機械運動或者處理記憶的設備,可以實現在線編程,該設備由電子系統或者計算機系統來執行。現階段職業院校機器人專業可通過以下三個層次進行培養:第一,機器人集成應用基礎知識學習;第二,機器人操作及基礎編程學習;第三,通過焊接工作站、碼垛工作站、及噴涂工作站等實訓項目對工業機器人的操作學習。
(1)機器人集成應用系統的學習。工業機器人在運動當中都是通過驅動電機進行運動的。機器人集成應用系統的學習很大程度上就是在了解機器人控制柜的原理。該系統主要通過PLC、PLC模擬量的輸出模塊、電磁閥、對射開關、變頻器、伺服驅動器等設備對電機或者伺服電機進行方向、轉速以及位置的控制。在實際教學當中,PLC作為實現工業現場自動化程序的控制核心,該課程可作為工業機器人專業的核心課程之一。變頻器通過整流(交流變直流)、濾波、逆變(直流變交流)、制動單元、驅動單元、監測微處理單元來調整輸出電源的電壓和頻率,從而達到對電機的調速控制。變頻器的內部是靠IGBT的開斷來調整輸出電源的電壓和頻率,因此電力電子技術也是該專業一個核心課程。伺服驅動器是控制電機運動的一個重要部分,由于涉及矢量控制電流、速度、位置等閉環算法,因此對于伺服驅動器的學習在職業院校不宜進行深入的理論學習,只要達到能靈活運用的目的即可。最后,通過觸摸屏及其相關編程軟件的學習,實現對工業機器人的控制。
(2)機器人的操作及基礎編程。第二階段的學習則是一個以實踐為主學習過程。在掌握各元器件及PLC的應用基礎上,首先實現通過變頻器和伺服驅動器對電機實現多段速控制、位置控制及速度控制。實現上述控制以后,通過自學引導方式掌握485通信、Modbus協議等,最終實現通過PLC對變頻器、伺服驅動器的通信來達到控制電機目的。最后一個階段可嘗試PLC之間的相互通信,學會PLC之間主站、從站的設立。進入該部分學習,可進行2至3人的小組分配學習方式進行。
(3)機器人實訓學習。焊接工作站、碼垛工作站及噴涂工作站等項目基本涵蓋工業環境當中所遇到的機器人操作情形。每個工作站的建立,除了機器人軀干以外,根據實現的功能不同,需對工作站進行不同單元的調整。以焊接工作站為例,除了機器人本體以外,還包括電源單元、焊槍單元、焊接工作臺、夾具單元、機器人底座、自動清槍單元等。通過一個工作站的學習可以做到了解機器人工作站的構成,在掌握好理論和做好安全防護的基礎上,可以進行一些簡單機器人操作。在實訓的同時聯系機器人集成系統的應用對機器人工作站工作原理的進行探索。
3 機器人專業在高職院校的培養方向的總結
工業機器人一般由機器人軀干、控制系統、驅動與傳動、傳感器等幾個部分組成。而其中的高精度減速機、高性能的直流伺服驅動器和穩定的控制系統等關鍵技術國內企業還沒很好的掌握。因此未來一段時間我國工業機器人的發展將集中在對基礎零部件的、制造能力提升、設計理念的更新以及對工業機器人行業的規范、整合等。作為高等職業類院校,在掌握機器人理論的基礎之上,可以更加注重人機互訪環境的學習,嘗試機器人的在線/離線等編程的教學。另外,機器人產業的發展勢必需要相應的機器人管理、銷售、營銷等人才,高職院校工業機器人專業也可以進行相關人才的培養。最后,針對工業機器人技術更新快的特點,一方面在校教職工要不斷的在學習,積極去企業學習最新的機器人技術,另一方面在教學中也要及時的更新設備與教材,保證培養出該專業的學生就業后可快速上崗操作。
參考文獻:
[1]王杰.六自由度機器人本體設計及軌跡規劃與虛擬仿真[D].合肥工業大學,2015.
[2]Saeed B.Niku.Introduction to Robotics:Analysis,Control, Applications,2nd Edition,2013.
[3]John J.Craig.Introduction to Robotics Mechanics and Control,2005.
猜你喜歡
職業(2016年10期)2016-10-20 22:11:48
職業(2016年10期)2016-10-20 22:09:41
科技視界(2016年21期)2016-10-17 19:15:26
商(2016年27期)2016-10-17 05:16:26
考試周刊(2016年79期)2016-10-13 23:25:20
考試周刊(2016年77期)2016-10-09 12:05:08
考試周刊(2016年77期)2016-10-09 11:59:13
大學教育(2016年9期)2016-10-09 09:02:26
科技視界(2016年20期)2016-09-29 12:58:21
科技視界(2016年20期)2016-09-29 12:56:14