連續旋轉的光纖陀螺全溫失準角快速建模與補償方法
2017-12-02 03:02:25楊志懷左文龍張曉雅張書穎
中國慣性技術學報 2017年5期
楊志懷,左文龍,張曉雅,張書穎
(天津航海儀器研究所,天津 300131)
連續旋轉的光纖陀螺全溫失準角快速建模與補償方法
楊志懷,左文龍,張曉雅,張書穎
(天津航海儀器研究所,天津 300131)
在全溫范圍內應用的光纖陀螺,其輸入軸失準角隨溫度的變化是影響光纖陀螺慣性系統性能的重要指標之一。特別是在大角速率或者高精度應用時,失準角的變化誤差甚至超過零偏漂移誤差和標度因數誤差。采用溫度補償技術是一種提升光纖陀螺溫度性能的有效方法,其中建立精確的溫度模型是關鍵。提出了一種連續旋轉的光纖陀螺全溫失準角快速建模補償方法。基于單軸速率轉臺的連續旋轉,可以有效識別光纖陀螺失準角在全溫范圍內的變化拐點,提高建模和補償的精度。試驗結果表明,某型光纖陀螺全溫輸入軸失準角變化約14″,補償后全溫輸入軸失準角變化小于1″,精度提高了一個數量級以上。在高精度光纖陀螺慣性系統中,該方法可用于指導光纖陀螺失準角的實時溫度補償技術研究及工程實現。
光纖陀螺;輸入軸失準角;溫度建模;補償
光纖陀螺是一種全固態的角速率傳感器,在捷聯慣性導航和旋轉式慣性導航系統中得到廣泛應用[1-2]。高精度光纖陀螺慣性導航系統對由溫度引起的光纖陀螺輸入軸失準角變化指標提出了很高的要求,是影響光纖陀螺慣性導航系統性能的重要因素之一。在全溫范圍內應用的光纖陀螺,特別是在大角速率或者高精度應用時,其輸入軸失準角隨溫度變化的誤差甚至超過零偏漂移誤差和標度因數誤差,嚴重制約光纖陀螺的環境適應性[3-8]。
光纖陀螺的核心角速率敏感元件是光纖環圈,它由固化膠粘結多匝光纖纏繞而成。光纖環圈的等效平面法線即為光纖陀螺的輸入軸(Input Axis, IA)。理想情況下,當光纖陀螺輸入軸與安裝面法線即輸入基準軸(Input Reference Axis, IRA)平行時,光纖陀螺的輸出量最大。高精度光纖環圈通常采用全脫骨技術、多極對稱繞制技術和紫外光固化膠或熱固化膠。高精度光纖陀螺所用的光纖環圈長達數千米,繞制匝數可達上萬匝。光纖陀螺的輸入軸是每匝光纖平面矢量合成的結果。由于繞制和膠體固化的不理想,導致 IA軸與IRA軸并不重合。在全溫條件下,由于光纖的不理想、光纖環繞制應力的不均勻、固化應力不均勻以及支撐結構與環圈接觸面的應力不均勻等原因,導致光纖陀螺的失準角隨溫度發生較大的變化[9]。因此,通過對光纖陀螺全溫失準角變化的準確測量可以為光纖環圈工藝改進和有效溫度補償提供依據。
通過以上分析,從機理上消除溫度變化帶來的光纖陀螺輸入軸失準角變化難度大、成本高。采用溫度補償技術是一種有效提升光纖陀螺溫度特性的方法[10],其中的關鍵技術點是如何建立一個精確模型。建模的精度越高,補償后的光纖陀螺全溫失準角變化就越小,這樣才能普適各種溫度環境。通常的光纖陀螺全溫失準角建模方法是選擇幾個典型的溫度點,分別進行測試得到各溫度點對應的光纖陀螺失準角,將其作為補償模型的輸入[9,11]。這種光纖陀螺全溫失準角的測試和建模方法,由于頻繁操作速率轉臺效率低,且隨著建模精度需求的提高需要增加更多的溫度測試點,會大大增加測試的時間和成本。本文提出了一種基于連續旋轉的光纖陀螺全溫失準角快速建模補償方法,可以有效識別失準角在全溫范圍內的變化拐點,無盲點地全面反映失準角隨溫度變化的情況。基于帶溫箱的單軸速率轉臺,在全溫條件下使其單向勻速旋轉即可實現失準角在單一方向上投影分量的全溫測試和建模,工程實現簡單易行。針對高精度光纖陀螺失準角補償精度的需求,通過增加試驗次數,還可以消除光纖陀螺零偏誤差、安裝誤差和轉臺臺面誤差的影響,提高失準角建模精度。
基于上述方法,對某型光纖陀螺進行輸入軸失準角的測試和補償分析。試驗結果表明,該型光纖陀螺全溫輸入軸失準角變化約14″,補償后全溫輸入軸失準角變化小于1″,精度提高了一個數量級以上,有助于提高光纖陀螺慣性系統的精度和環境適應性。
1 光纖陀螺輸入軸失準角測試方法
光纖陀螺的輸入軸失準角及其隨溫度的變化主要源于光纖環圈及其支撐結構的物理特性。在失準角測試過程中,光纖陀螺的安裝誤差和轉臺臺面誤差會影響失準角的測試精度。基于高精度加工的六面體工裝,通過多方向測量失準角投影分量的方法可以消除光纖陀螺安裝誤差和轉臺臺面誤差的影響[11]。
如圖1所示,將光纖陀螺安裝在高精度六面體工裝上(統稱為載體),并將其作為一個整體安裝在轉臺臺面上。設定與六面體上安裝面垂直的軸為OZ軸(即為IRA軸);與OZ軸垂直的六面體中相互垂直的兩個棱邊軸分別為OX軸和OY軸,其與OZ軸共同構成一個直角坐標系。為保證測試精度,要求光纖陀螺安裝面、六面體的安裝面和其三個軸的垂直度的加工誤差均在在角秒量級。光纖陀螺輸入軸IA與IRA軸之間的夾角即為光纖陀螺的輸入軸失準角θm。

圖1 光纖陀螺與六面體測試工裝示意圖Fig.1 Schematic of the FOG and hexahedron testing
將上述載體安裝在轉臺臺面上,使IRA軸平行于轉臺臺面。光纖陀螺輸出ΩIA與轉臺輸入角速率Ω的關系可以表示為

式中:Ω0為光纖陀螺的固有零偏;θT為輸入軸失準角在載體當前測試平面內的投影(T=x,y),其中,θx為IA在XOZ平面投影與IRA的夾角,θy為IA在YOZ平面投影與IRA的夾角。
通過采用較大輸入角速率和取光纖陀螺旋轉整周期輸出數據的方法,可以克服地球自傳的影響,提高測試精度[11]。同樣在采用較大輸入角速率條件下,通過加長測試時間(即取光纖陀螺旋轉多圈周期輸出數據平均值)的方法,亦可以克服地球自傳的影響,提高光纖陀螺輸入軸失準角的測試精度。在轉臺輸入角速率Ω一定的情況下,通過測試光纖陀螺多圈旋轉周期輸出的平均值,由公式(1)即可以計算得到θx和θy。
利用以上測得的兩個數據θx和θy,光纖陀螺的輸入軸失準角可以表示為

光纖陀螺輸入軸失準角誤差可以分為常值誤差和溫度敏感誤差。常值誤差主要由光纖陀螺結構體安裝面的平面度、六面體工裝安裝面的平面度、轉臺臺面的平面度以及臺面之間的安裝誤差等因素導致。 常值誤差不隨光纖陀螺的環境溫度變化而發生變化。溫度敏感誤差是指光纖陀螺失準角隨著溫度的變化而變化,其主要與光纖環圈繞制、固化材料和粘結工藝等導致的環圈內部應力變化相關。
2 光纖陀螺全溫失準角變化測試系統及方法
將圖1所示裝有光纖陀螺的六面體工裝置于自帶溫箱的單軸速率轉臺上,將其IRA軸與轉臺臺面平行。溫箱溫度變化曲線設置如圖2所示,當單軸轉臺以較大的輸入角速率勻速旋轉時,光纖陀螺輸出數據的平均值變化即反映光纖陀螺的輸入軸失準角隨溫度的變化情況。
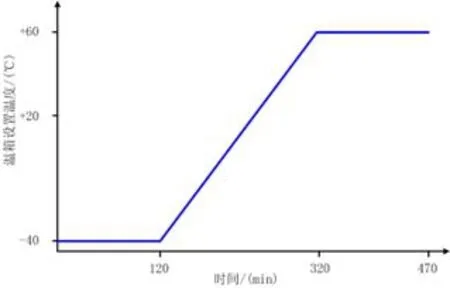
圖2 溫箱設置溫度變化曲線Fig.2 The temperature change curve of the oven
圖3所示為光纖陀螺全溫失準角變化測試系統,主要包含裝單軸光纖陀螺、六面體載體工裝、單軸速率轉臺、溫箱。

圖3 光纖陀螺輸入軸全溫失準角變化測試系統Fig.3 The test system of input axis misalignment angle
2.1 全溫失準角在YOZ平面投影的測試
將光纖陀螺OY軸正向朝天平行于單軸速率轉臺的法線方向,此時IRA軸與轉臺臺面平行。轉臺速率以300 (°)/s的恒定速率單向旋轉,溫箱按照圖2所示溫變曲線設置。記錄整個測試周期內的光纖陀螺輸出數據。該輸出數據平均值的變化即可反映光纖陀螺失準角在YOZ平面投影值隨溫度的變化情況。圖4所示即為全溫條件下,輸入軸失準角的等效投影分量的變化測試曲線。
為了消除光纖陀螺零偏及地球轉速的影響,設置轉臺以相同的角速率反向勻速旋轉,測試該條件下的光纖陀螺在全溫條件下的輸出數據。將上述兩組實驗測試曲線按公式(3)計算,可以消除光纖陀螺零偏及地球轉速的影響,得到全溫失準角在YOZ平面的真實投影值。

其中,ΩIAy+和ΩIAy-分別表示轉臺正反轉條件下測試的光纖陀螺輸出曲線值。由于θAy1遠小于 1,計算時近似取 sin(θAy1)≈θAy1,將其記為OY軸垂直轉臺臺面方向時的第一個測試計算值。此測試狀態下的θAy1包含光纖陀螺失準角在YOZ平面的投影值、轉臺結構誤差和光纖陀螺安裝誤差。
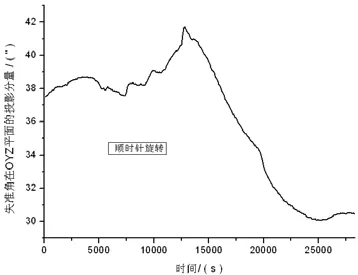
圖4 輸入軸失準角在YOZ平面投影分量測試曲線Fig.4 The input axis misalignment angle in the YOZ plane projection component test curve
為了消除轉臺結構誤差,將六面體繞OY軸旋轉180°,重復上述測試過程,獲得OY軸垂直轉臺臺面方向時的第二個測試計算值θAy2。取上述兩者的均值即可以消除轉臺結構誤差,可以表示為

為了消除安裝誤差,將六面體載體繞IRA軸旋轉180°,使OY軸正向朝下平行于轉臺輸入軸。重復OY軸朝天時的2次測試過程,分別獲得OY軸垂直轉臺臺面方向的第3個θAy3和第4個θAy4測試計算值,仍然取其兩者的平均值來消除此時的轉臺結構誤差,可以表示為

最終,消除安裝誤差后的IA在YOZ平面內的投影分量與IRA軸的夾角隨溫度的變化曲線可表示為
2.2 全溫失準角在XOZ平面投影的測試
將光纖陀螺繞OZ軸旋轉90°,分別使OX軸正向朝上和朝下垂直于轉臺臺面。然后按照上述 2.1中求取θy的方法進行測試和計算,得到IA軸在XOZ平面內投影分量與IRA軸的夾角隨溫度的變化曲線θx。
3 光纖陀螺全溫失準角建模與補償分析
根據上述測試和計算方法,圖5給出了全溫失準角在YOZ和XOZ平面投影的計算曲線θx和θy。
圖6所示為根據公式(2)計算出的光纖陀螺輸入軸失準角變化隨溫度的變化曲線,其中光纖陀螺輸入軸失準角在全溫條件下變化約14″。
從圖6可以看出,上述基于連續旋轉的光纖陀螺全溫失準角快速建模方法可以有效識別失準角在全溫范圍內的變化拐點,無盲點地全面反映失準角隨溫度變化的情況,從而提高建模精度。針對上述測試和計算得到的數據曲線,可以采用分段式最小二乘法實現光纖陀螺全溫失準角的建模和補償。為了提高建模精度,分段的拐點可以選擇在曲線的斜率拐點處,且在拐點附近減小分段補償的間隔以提高建模精度。
選定10個分段溫度點進行最小二乘法建模,圖7給出了補償后的光纖陀螺失準角變化曲線。可以看出,全溫失準角變化由補償前的14″提高到1″以內,性能提高了一個數量級以上。
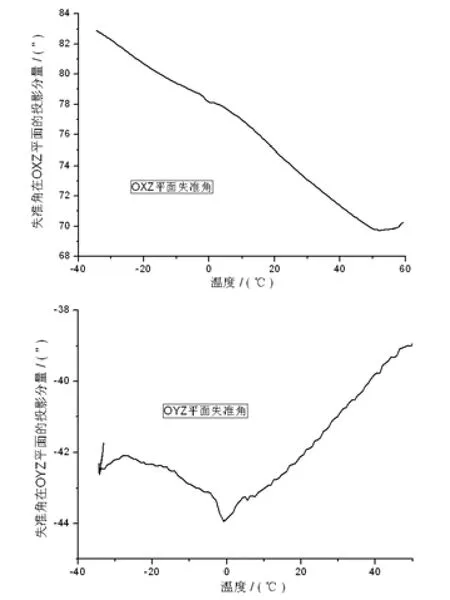
圖5 失準角在YOZ和XOZ平面投影分量的計算曲線Fig.5 The input axis misalignment angel in the YOZ and XOZ plane projection component calculated curve
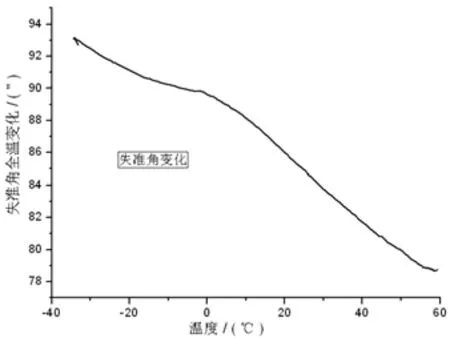
圖6 補償前光纖陀螺輸入軸失準角隨溫度變化曲線Fig.6 The relationship curve between input axis misalignment angel and temperature before compensation
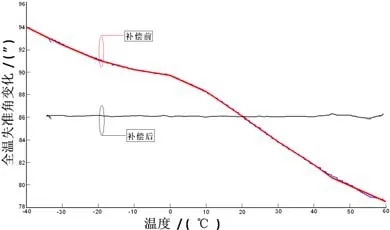
圖7 補償后光纖陀螺輸入軸失準角隨溫度變化曲線Fig.7 The relationship curve between input axis misalignment angel and temperature before and after compensation
4 結 論
由于光纖環圈材料特性的原因,光纖陀螺輸入軸失準角隨溫度變化而變化。這嚴重影響高精度光纖陀螺的工程應用效果。基于單軸速率轉臺的連續旋轉,可以在大大提高建模效率的同時,實現全溫范圍內的光纖陀螺失準角變化無盲點地高精度測試,從而在分段擬合時可以精確選擇分段補償的拐點位置,使得建模和補償的精度更高。與此同時,采用上述測試方法對不同膠體及工藝條件下的光纖陀螺進行全溫失準角對比測試,可以指導光纖環圈的設計與工藝研究,從而提高光纖陀螺的工程適用性。
(References):
[1]Lefevre H C.The fiber-optic gyroscope: actually better than the ringlaser gyroscope?[C]//Proc.of SPIE, 2012, Vol.8421: 842104(1-8).
[2]Sanders S, Taranta A, Mosor S, et al.Fiber optic gyros in a highperformance, high-reliability inertial reference unit for commercial satellites[C]//Proc of SPIE.2012, Vol.8421: 842106(1-4).
[3]朱國力, 文香穩, 潘明華.三維姿態測量系統的安裝誤差[J].華中科技大學學報, 2011, 39(5): 1-5.Zhu G L, Wen X W, Pan M H.Installation errors of three-dimension pose measurement systems[J].Journal of Huazhong University of Science and Technology (Natural Science Edition), 2011, 39(5): 1-5.
[4] Qin S Q, Huang Z S, Wang X S.Optical angular encoder installation error measurement and calibration by ring laser gyroscope[J].IEEE Transaction on Instrumentation and Measurement, 2010, 59(3): 506-511.
[5]李巖, 張智永, 范大鵬.陀螺安裝誤差影響視軸穩定平臺精度的機理研究[J].光電工程, 2007, 34(9): 10-15, 29.Li Y, Zhang Z Y, Fan D P.Principle of the effect of gyro misalignment on the stabilization platforms accuracy[J].Opto-Electronic Engineering, 2007, 34(9): 10-15.
[6]Chen T, Zhou W Q, Mao Z H, et al.Analysis of the gyro misalignment angle in Goniometer based on fiber optic gyroscope[J].Opitk,2016, 127(2): 769-772.
[7]Li G, Wu W Q, Fan Z F, et al.Research of misalignment between dithered ring laser gyro angle rate input axis and dither axis[C]//Proc of SPIE.2014, Vol.9297: 92971X(1-6).
[8]Li Q.Time-varying gyrocompass alignment for fiber-opitc-gyro inertial navigation system with large misalignment angle[J].Optical Engineering, 2014, 53(9): 095103(1-5).
[9]吉世濤, 秦永元, 藍燕, 等.光纖陀螺輸入軸失準角溫度補償研究[J].測控技術, 2010, 29(10): 6-8.Ji S T, Qin Y Y, Lan Y, et al.Temperature compensation research on input axis misalignment of FOG[J].Measurement & Control Technology, 2010, 29(10): 6-8.
[10]楊志懷, 張曉雅, 宋麗薇, 等.光纖陀螺標度因數遲滯模型分析與補償技術[J].中國慣性技術學報, 2017, 25(4): 514-517.Yang Z H, Z X Y, Song L W, et al.Analysis on the hysteresis phenolmenon of FOG scale factor model and compensation technology[J].Journal of Chinese Inertial Technology, 2017, 25(4): 514-517.
[11]陽明曄, 宋章啟, 張學亮, 等.光纖陀螺輸入軸失準角的溫度特性[J].國防科技大學學報, 2014, 36(3): 46-50.Yang M Y, Song Z Q, Zhang X L, et al.Temperature characteristics of input axis misalignment angle of fiber optic gyro[J].Journal of National University of Defense Technology, 2014, 36(3): 46-50.
Modeling and compensation method for input axis misalignment angle of FOG with continuous rotation
YANG Zhi-huai, ZUO Wen-long, ZHANG Xiao-ya, ZHANG Shu-ying
(Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
The input axis misalignment angle along with the change of temperature is one of the major indicators of fiber optic gyro inertial navigation system, especially when applied in full temperature.Its influences are more than those of bias error and scale factor error in large angular rate or high precision applications.Temperature compensation technology is an effective method to improve the temperature characteristic of fiber optic gyro.Establishing a mathematical model for temperature is the key technique.A modeling and compensation method for the input axis misalignment angle in full temperature is presented.Based on a continuous rotation method, it can effectively identify the turning point of misalignment angle in full temperature.And then the precisions of the modeling and compensation will be improved.Experiments show that the input axis misalignment angle can be reduced from 14″ to below 1″.This method can be used to guide the real-time temperature compensation research and engineering realization of the input axis misalignment angle.
fiber optic gyro; input axis misalignment angle; temperature modeling; compensation
U666.1
A
1005-6734(2017)05-0686-04
10.13695/j.cnki.12-1222/o3.2017.05.022
2017-07-15;
2017-09-20
裝發部裝備預研項目(41417010102)
楊志懷(1982—),男,高級工程師,研究方向為光纖陀螺及光纖傳感技術、導航與控制。E-mail: yzhtj@126.com