中職學校《工業機器人仿真技術》一體化課程設計
——基于RobotStudio仿真教學軟件
2018-03-20 01:56:32毛暖思
海外文摘·藝術 2018年24期
毛暖思
(廣東省海洋工程職業技術學校,廣東廣州 510320)
《中國制造2025》中明確指出:“在未來發展的過程中,隨著各種政策和人口利潤等市場因素的影響,我國工業機器人市場本身也還能夠保持高速增長的態勢,機器人產業勢必會對我國的人才有更多的需求。所以越來越多的學校開設了機器人技術專業。但是,很多工業機器人專業的課程開發、教學研究和其他諸多方面都還處于探索的階段,甚至還存在著教學效率低下等一系列的問題。本文主要結合實際的案例,再將《工業機器人仿真技術》一體化課程設計進行全面詳細的論述,希望能夠給大家更多的參考性意見。
1 一體化課程的概念
一體化課程是將理論教學和實踐教學結合為一體的課程教學模式。通過這樣的模式往往能夠更好地促進學生認知能力的發展,并能夠將職業能力、發展規律和相關的技術更好地結合在一起。學生可以在教學的過程中通過對工作任務、過程和環境進行整體的感悟和反思,從而將技能、過程和方法有效地結合在一起。
一體化課程也可通過“校企合作”的方式來更好地培養學生的能力。通過以學生為中心來全面設計課程的體系和內容,并按照工作的過程和順序讓學生更加自主地安排教學活動,從而有效實現理論教學和實踐教學的融合。在這個過程中,通常能夠實現整體反思、感悟、知識技能和方法的有效統一。最終都是通過將理論學習和實訓頂崗工作相結合的方式來有效地進行的。
2 《工業機器人仿真技術》概述
工業自動化的市場競爭壓力日益加劇,客戶在生產中要求更高的效率,以降低價格,提高質量。如今讓機器仍編程在新產品之始花費時間檢測或試運行是行不通的,因為這意味著要停止現有的生產以對新的或修改的部件進行編程。ABB的RobotStudio是建立在ABB VirtualController上的,我們可以使用它在電腦中輕易地模擬現場生產過程,讓客戶了解開發和組織生產過程的情況。
3 《工業機器人仿真技術》課程在專業課程體系中的作用
工業機器人技術專業主要是為了通過培養高端的技能型人才而存在的專業,為的就是能夠讓學生有效地完成包括操作、編程、維修和維護等技術任務。每個學生只有掌握了操作工業機器人最實用的技術才能夠更好地學習其他專業課程。

表1 專業課程體系示意表
傳統的《工業機器人仿真技術》培訓主要有成本高、安全隱患多和難以進行獨立操作等諸多方面的問題。但是,如果采用RobotStudio仿真軟件來進行實際操作,那么就能夠有效地避免上述問題發生。并通過對仿真工業機器人進行真實操作,才能夠有效地提高學生的動手能力、分析問題和解決問題的能力。
4 工業機器人應用與維護專業課程體系
整個工業機器人應用與維護專業的專業課程體系的內容主要由如下幾個方面組成。
如表1所示的內容可以看出,整體工業機器人應用與維護專業的課程內容主要是由理論和實踐共同組成的,之后再將學習到的技術有效地運用到實際操作的過程中。
5 一體化課程開發的主要過程
5.1 課程目標
通過針對《工業機器人仿真技術》有效地進行一體化課程設計,主要有以下幾個重要的作用:第一,可以讓學生全面了解到現代工業機器人仿真軟件的發展;第二,通過操作RobotStudio軟件往往能夠有效地對工業機器人進行全面操作和控制,并在之后全面對機器人進行仿真運行,以便能夠幫助大家有更好的軟件編程和調試能力。第三,在學習的過程中,學生能夠更好地與團隊成員進行溝通和協作,并通過獲取相關的知識來更好地解決問題,從而為后續機器人的應用奠定良好的素質。
5.2 課程開發的原則
先對典型的工作崗位進行全面的分析,之后再全面地考慮前后課程之間的關系。再根據實際工業機器人操作的特點,以實際崗位和虛擬工作站為實際的載體,之后再讓學生更好地學習與工業機器人有關的仿真技術。
5.3 課程主要內容
《工業機器人仿真技術》一般都會開設在中職二年級上學期,本身也屬于該專業中的核心課程。由于學生在之前學習到了關于工業機器人電氣、機器結構、機器人分類和工作原理進行全面了解。學生可以通過掌握工業機器人在實際工作中的工作過程、操作方法和操作步驟來更好地學習實際的內容。
5.4 教學內容安裝
5.4.1 認識和安裝RobotStudio系統
先讓學生了解工業機器人仿真技術的發展現狀,并在之后讓更多的學生來認識和安裝RobotStudio仿真軟件。
5.4.2 布置基本工業機器人仿真工作站
當學生了解過工業機器人仿真技術之后,之后再全盤布置基本的工業機器人仿真工作站。主要可以通過如下幾個步驟進行:第一,先全面布置機器人工作站系統,并對系統全盤進行分析;第二,讓學生進行手動操作練習;第三,全面創建工件坐標編程軌跡;第四,錄制整個工作站運行仿真和視頻。
5.4.3 全面使用RobotStudio中的建模功能
全面通過運用RobotStudio中的建模工具和測量工具來創建一個有效的機械滑臺,之后再全面創建機器人工具。
5.4.4 全面實現離線編程功能
先創建機器人運行的軌跡和路徑,并有效地調整運行的軌跡和運行的命令。完成上述兩個步驟之后在有效地配置軸參數,并在之后碰撞檢測相關的數據。
5.4.5 虛擬示教器的使用方法
先全面熟悉虛擬示教器的基本操作,并在之后設置專用的DSQ625板卡,并運用合適的方法來設置通信信號。
5.4.6 有效地創建導軌和變位機的機器人系統
先全面創建帶導軌的機器人控制系統,之后再全面創建與變位機的機器人系統相關的控制系統。
上面是通過項目的方式來有效地實現《工業機器人仿真技術》一體化課程的設計。主要可以讓學生學習到包括工業機器人軟件的安裝、工業機器人系統創建、離線編程和仿真、創建機器人裝置和其他幾個過程組成。
6 一體化課程實際案例運用
上面主要講述了一體化課程的設計過程,從內部可以看出,主要可以采用項目式教學和任務驅動的方式讓學生通過學習工業機器人的仿真過程來更好地熟悉實際工業機器人的操作技能。
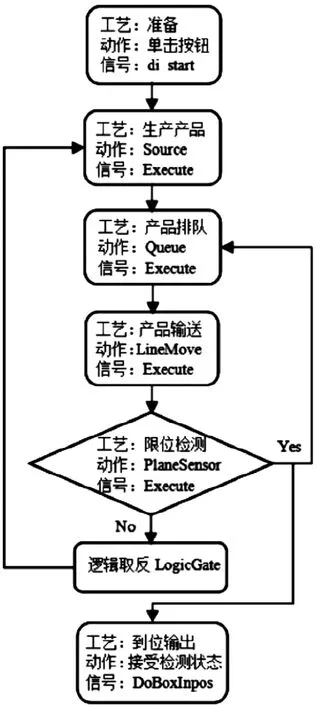
圖1 輸送線流程示意圖
6.1 新課導入
先可以全面介紹工業機器人的碼垛技術,之后再結合實際應用的情況來全面分析工作站。
6.2 碼垛仿真
可以針對工作站布局和輸送線段的流程設計來全面抓取流程設計的整個過程。之后也可以通過全面組織輸送線動作設計和工業機器人動作效果設計相結合來有效地設計碼垛工作站內部的組件,一定要注意在設計的過程中調整如下部分的程序:
PROC Main
rInit ALL
WHILE TRUE DO
IF bPalletFull=FALSE THENs
rPick;
rPlace;
ELSE
WaitTime0.5;
如圖1所示,主要顯示了整個輸送線內部的主要流程,在操作的過程中,我們一定要按照相關的流程來操作,才能夠有更好的效果。
6.3 自由練習
學生一定要通過自己動手來全面了解仿真的要領,只有通過熟悉垛碼的全過程才能夠有效地解決仿真過程中可能會出現的各類問題,并在之后取得好的效果。整體仿真的過程如圖2所示。
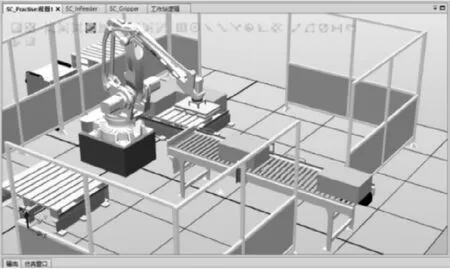
圖2 垛碼仿真示意圖
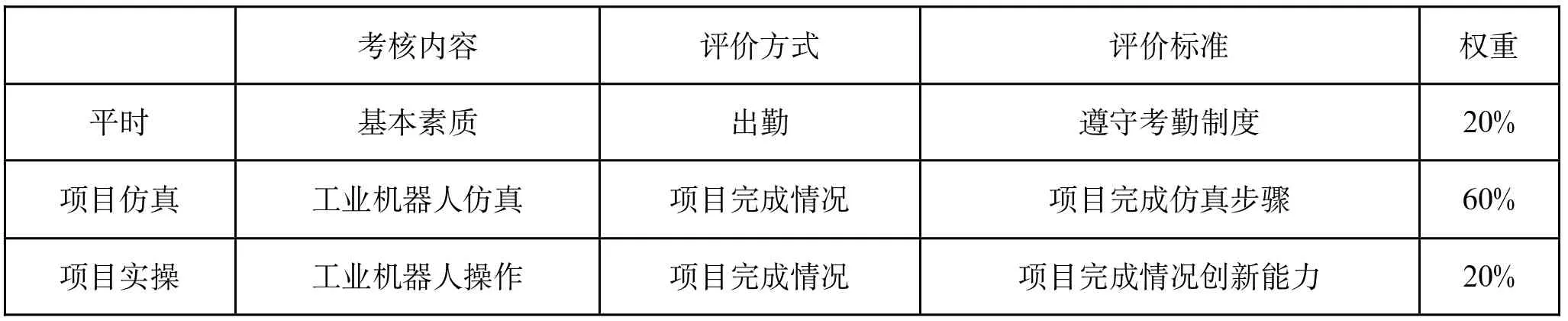
表2 考核評價示意表
6.4 項目考核方式
如表2所示,我們可以看出主要強調了考核形式的多樣性、考核控制的過程和考核的目標,并在之后采用過程評價法和結果評價法相結合的方式來進行考核。老師在考核的過程中尤其需要結合考勤情況、學習態度、操作規范和任務完成的情況進行全面的分析,并在之后綜合地評定學生的成績。
此外,也尤其需要結合一體化課程的具體特點,結合學生的綜合素質來評定學生的成績,并通過有效的分析學生動手能力和實踐的分析來讓學生更好地解決實際問題的能力。尤其需要對實踐能力強的學生進行有效地鼓勵。
7 “一體化”課程的創新點
整個《工業機器人仿真技術》課程主要是由機器人工作站、離線編程軌跡和自定義的仿真理論來更好地結合在一起。在教學的過程中,主要通過理論和實際相結合的方式,讓學生能夠在學習理論知識的過程中來更好地進行實踐。正是因為在企業發展的過程中,一般都會采用工業機器人作為授課的載體,從而使得學生能夠在學習的過程中更好地進行生產。
在教學的過程中,老師除了可以在課堂上給學生講課,還可以運用多媒體視頻資料和實際生產相結合的方式給學生布置任務和指導書,從而也就能夠讓學生在實際操作的過程中完成相應的任務。整個生產項目都能夠更好地和企業生產的實際情況聯系在一起。
8 采用一體化課程設計的優勢和缺點
8.1 采用一體化課程設計的優點
通過將課程一體化設計運用于《工業機器人仿真技術》研究的過程中,往往有以下幾點優點:第一,學生往往能夠通過實際的操作來更好地鞏固在學習工業機器人時的理論知識;第二,正是因為在實際操作的過程中和企業的需求更好地聯合在了一起,往往能夠全面熟悉工業機器人的仿真過程和實際操作的情況;第三,在使用的過程中往往能夠有效地降低設備的損壞率。
8.2 采用一體化課程設計的缺點
學生在將一體化課程設計運用于《工業機器人仿真技術》的學習過程中時,通常會產生如下幾點問題:第一,目前還沒有開發出一系列有針對性的教材,老師尤其需要結合自身的實際情況來全面進行編寫。第二,正如文章中所呈現的內容一樣,主要都是采用項目法來全面地進行教學,但是在教學的過程中,學生其實會遇到各種各樣的問題。又因為很多老師沒有在企業實踐的經驗,所以老師在遇到一些突發狀況時往往疲于應付。第三,大部分學校的人力和財力都較為有限,所以有必要進一步提高實踐教學的效率,只有這樣才能夠讓課程中的理論和實踐過程更好地結合在一起。
9 結語
綜上所述,本文主要具體分析了“一體化課程”在《工業機器人仿真技術》中的運用效果。文章中重點論述了課程開發的原則、課程目標、教學內容、教學方法和教學方法,并對每一個環節進行詳細的論述。而從實際的情況來看,這種工業一體化的課程教學模式往往能夠更好地提高教學的效率,并在之后全面提高學生的能力和水平,并更好地延長設備的使用壽命,并在之后為后續課程的順利進行奠定良好的基礎。但在教學的過程中也確實會發現一些問題,學生尤其需要在后期教學的過程中有效地運用相關的策略。總而言之,將一體化課程設計運用于《工業機器人仿真技術》的教學過程中一般都會有更好的效果。
猜你喜歡
內蒙古教育(2021年20期)2021-03-08 01:09:14
甘肅教育(2020年14期)2020-09-11 07:57:50
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
體育師友(2013年6期)2013-03-11 18:52:18
