基于深度學習的軍用飛機部件狀態(tài)參數預測
2018-03-28 07:20:37李軍亮滕克難
振動與沖擊 2018年6期
關鍵詞:發(fā)動機
李軍亮, 滕克難, 夏 菲
(1. 海軍航空大學 科研部, 山東 煙臺 264001;2. 92635部隊, 山東 青島 266041;3. 國網遼陽供電公司信息通信分公司,遼寧 遼陽 111000)
軍用飛機是一種復雜可修系統(tǒng),其狀態(tài)監(jiān)測數據包含了飛機、發(fā)動機和機載設備的運行信息、操縱控制變量信息、姿態(tài)信息等等。由于采集信號的傳感器種類較多,采集的數據具有種類多、數據結構各異、非線性等特點,如何有效利用飛參數據對飛機關鍵部件的狀態(tài)進行準確預測,提高飛機的使用可靠性、飛行安全性和任務成功率,是目前急需解決的難點問題。
目前狀態(tài)預測的主流算法有基于可靠性理論的預測方法、基于數據驅動的預測方法和基于時效物理模型的預測方法[1-3]。基于可靠性理論的預測方法又分為壽命分布模型的預測[4]和基于故障樹預測[5]的方法等;基于數據驅動的預測又分為時間序列預測[6-9]、神經網絡預測[10-13]和基于濾波的預測方法[14]等;失效物理模型主要根據產品的全生命周期和失效機理知識進行產品可靠性評估[15]。現(xiàn)有的預測技術在理論研究和實際應用方面已經取得了較大的進步,但是,已有的預測方法也存在諸多局限,預測過程對數學模型的依賴程度大,不能滿足復雜系統(tǒng)的實際要求,在系統(tǒng)的數學模型不精確時無法獲得滿意的結果。并且多數預測模型屬于靜態(tài)模型,缺乏自學習能力,預測模型通過一次建模獲得,模型參數保持固定不變,沒有考慮到新增樣本對模型參數的影響,對于復雜裝備的預測通常出現(xiàn)單步預測不精確、多步預測無效的問題。
2006年Hinton等[16]探討了一種處理大數據的工具,即深度學習理論。深度學習旨在通過模擬大腦的學習過程,構建深層次的模型,結合海量的訓練數據,來學習數據中隱含的特征,即利用大數據來學習特征,從而刻畫數據豐富的內在信息,最終提升分類或預測的精度。目前,深度學習在語音識別、圖像識別等領域的大數據分析上取得了突破性進展[17-18]。
在健康管理、故障診斷和預測方面,文獻[19]采用多層RBN(Restricted Boltzmann Machine, RBM)構建一種故障診斷模型;文獻[20]基于深度學習理論,設計了DAE(去噪自動編碼機)為核心的針對機械設備的健康狀態(tài)監(jiān)測方法;文獻[21]采用多層RBN來設計一種航空飛行器故障信息檢測方法。論文基于軍用飛機的狀態(tài)信息,基于多層RBN和模擬退火算法設計了一種DBN(Deep Belief Net)方法對飛機的關鍵部件的監(jiān)測參數的短期趨勢進行預測,從而為軍用飛機的健康狀態(tài)評估提供依據。
1 基于深度信念網絡的狀態(tài)預測模型
1.1 深度信念網絡模型
深度信念網絡是多層網絡結構,主要包括一個可見層和多層隱藏層如圖1所示。可見層輸入數據并且向隱含層傳遞數據信息完成過程學習。
深度信念網絡的結構類似于多層受限制伯爾曼茲機網絡(Restricted Boltzmann Machine, RBM)[22],每一個RBM單元由兩層組成,分別為隱藏層和可見層。兩層之間的信息傳遞是受限制的,可見層到隱含層之間的數據轉換由S激活函數按照RBM學習規(guī)則進行。DBN結構如圖1所示,圖1包括3層RBM,第一層RBM包括可見層1和隱藏層1(為第2個RBM的可見層),第2層RBM包括可見層2(隱藏層1)和隱藏層2(為第3個RBM的可見層),第3層RBM包括可見層3(隱藏層2)和隱藏層3(為輸出層的輸入數據)。
DBN中的每一個中繼層都按照上述的規(guī)則進行訓練數據,整個網絡學習過程如圖2所示。圖2中,整個網絡的輸入數據包括:預處理的狀態(tài)監(jiān)測參數、網絡層數、隱藏層數量、每層的神經元數量以及每層RBM單元的迭代次數。所有輸入數據在網絡訓練之前進行初始化。
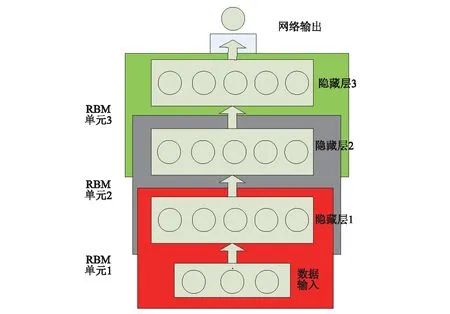
圖1 深度信念網絡的結構Fig.1 Deep belief network structure
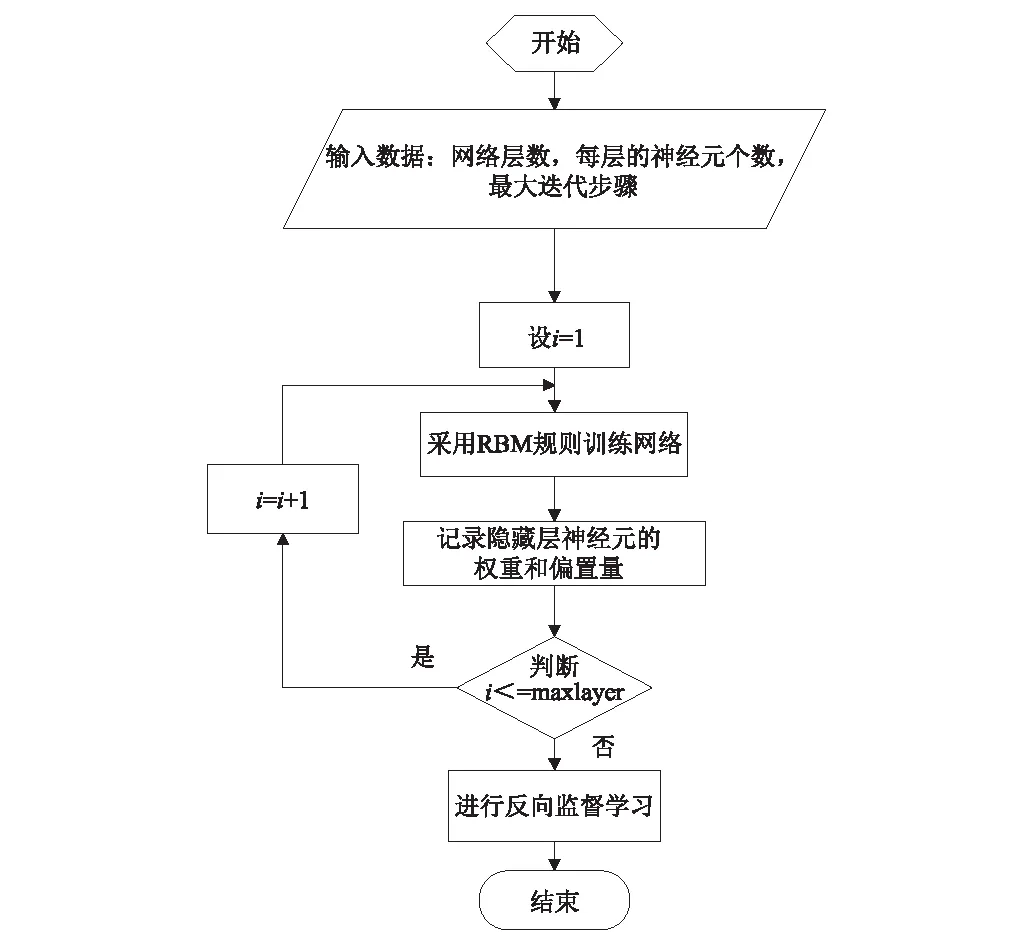
圖2 深度學習網絡的訓練過程Fig.2 Flowchart of the DBN training process
每層RBM單元的訓練過程分為兩個階段,分別為主動學習過程(Positive Learning Phase, PLD)和被動學習過程(Negative Learning Phase, NLD),主動學習過程從最早的可見層將數據轉送到隱藏層并且確定隱藏層神經元產生的概率p(h|v,W),相反被動學習過程是上層可見單元的數據重組過程以及產生對應的概率p(v|h,W)。觀測的樣本數據作為向量輸入到可見層,在RBM單元的訓練過程中不斷進行主動學習和被動學習直至滿足最大迭代次數,由此確定神經元之間的權重。整個RBM的學習函數可用可見層變量v產生的概率p(v)來表示,其中v是權重和隱含層變量的函數,如式(1)所示

(1)
整個網絡的學習過程從低層到高層逐步學習,在DBN各層學習的過程中間,各層RBN學習過程中內部獨立訓練權值和偏置量并存儲,可以進一步分析。在訓練結束之后,樣本數據從第一個可見層直到通過DBN結構傳遞到最高階的隱含層。
可見層和隱層之間的權重和神經元之間的偏置量通過不斷迭代而進行優(yōu)化,直至滿足最大迭代次數。DBN各層之間的按照無監(jiān)督方式學習,預測的目標模型和數據并將會在后續(xù)的監(jiān)督學習過程中使用,稱之為反向學習。
1.2 基于SA的DBN網絡狀態(tài)預測模型
本節(jié)主要討論基于SA的DBN狀態(tài)預測網絡模型的實現(xiàn)。該模型可分為三個步驟實現(xiàn),一是基于模擬退火的多層受限制的伯爾曼茲機無監(jiān)督訓練,二是有監(jiān)督的反向傳播(BP)過程,三是基于任務要求和狀態(tài)信息預測算法。
(1)多層無監(jiān)督學習
正如1.1節(jié)所述,DBN由多層受限制伯爾曼茲機組成,通過每個RBM單元有序的按照帶有T算子的RBM規(guī)則訓練完成。每個RBM由兩層組成,每層由一定數量的神經元,而且同層各神經元之間無連接[23]。因此,主要的訓練參數在RBM只考慮各層神經元之間權值。激活函數采用sigmiod函數,如式(2)所示
(2)
式中:si和bi分別為隱層第i個神經元的狀態(tài)量和偏置量;sj為可見層第j個神經元狀態(tài)量;wij為神經元i和j之間的權重;T為網絡溫度。
圖3表示了RBM單元的迭代學習過程。在開始階段,對各個權重和偏置量進行初始化。初始化之后,輸入采集的樣本對RBM單元訓練。RBM隱層的神經元由可見層的神經元狀態(tài)以及它們之間的權值、偏置量和激活函數確定。每次迭代過程包含兩方面,主動學習和被動學習。主動學習過程將可見層輸入數據轉化到隱含層,被動學習是對前可見層的重新構造。這兩種學習方式可用式(3)和式(4)表示
(3)
(4)
式中:hj和vk分別為隱層單元的第j個神經元和可見層的第k個神經元。式(3)為主動學習過程中的隱層神經元狀態(tài),由激活函數確定,式(4)為被動學習過程可見層神經元的狀態(tài)。可見層和隱層的神經元按概率隨機取值0或者1,代表鏈接或者斷開狀態(tài)。
(5)
式中:δ在0~1取值,代表學習速率;〈vkhj〉data為主動學習之后的隱層第j個神經元和可見層的第k個神經元之間的狀態(tài)變量;〈vkhj〉recon為被動學習之后可見層的重組神經元的狀態(tài)向量。偏置量也按照相同規(guī)則迭代。為了使學習過程更加穩(wěn)定,變量m被用來更新權重和偏置量。權重的變化量Δwjk,當前迭代過程和先前跌過步驟可用式(6)表示
(6)

在DBN學習過程權值和偏置量中不斷迭代優(yōu)化,通過各個RBM單元的迭代實現(xiàn)DBN網絡的訓練。

圖3 RBM單元的迭代學習過程Fig.3 Iterative learning of RBM unit
(2) 反向有監(jiān)督學習
在進行完各個RBM單元的學習之后,要進行有監(jiān)督的學習,通過反向神經網絡訓練算法來完成。監(jiān)督學習算法可以進一步減少訓練誤差提高網絡的預測精度。有監(jiān)督的學習通過使用分類數據進行DBN模型訓練。和無監(jiān)督學習的不同只考慮一個RBM單元,反向DBN同時考慮所有的RBM單元。訓練誤差由訓練模型輸出數據和分類目標數據計算得出。DBN模型的各項參數不斷更新以使得誤差最小,直至達到最大迭代次數。在進行DBN的反向訓練之后再通過微調算法對整個網絡參數進行為微調。文中采用共軛梯度算法進行微調。
(3)軍用飛機部件狀態(tài)參數預測
軍用飛機執(zhí)行不同任務包含不同的任務剖面,不同任務剖面對應不同的放飛標準,不同放飛標準對應不同最小設備清單,不同設備清單對應不同的技術狀態(tài)。因此針對不同任務應當有針對性的提高對應部件的可靠性,從而遂行作戰(zhàn)任務。某型飛機作戰(zhàn)任務的任務剖面和裝備狀態(tài)的對應關系如表1所示[24]。
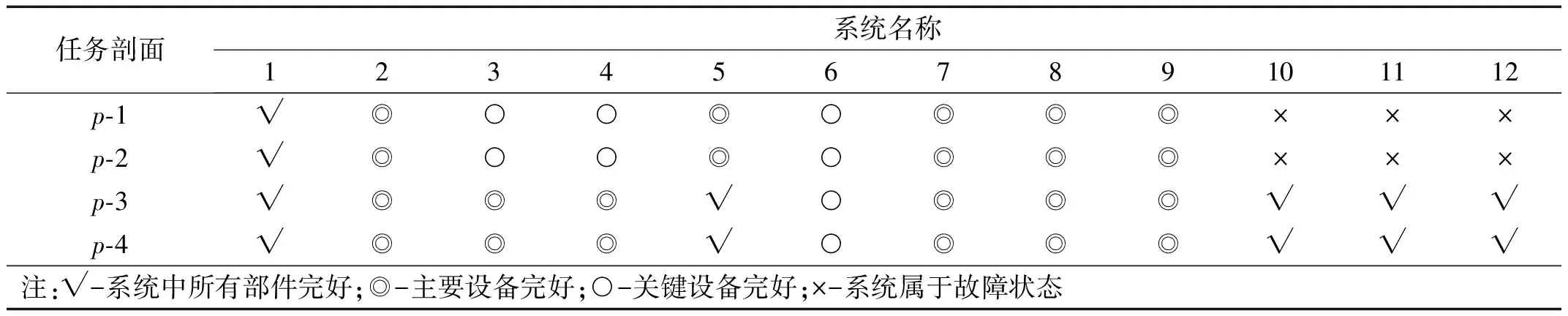
表1 飛機任務剖面與飛機各系統(tǒng)設備狀態(tài)關系
表1中,s-1代表動力系統(tǒng),s-2代表燃油系統(tǒng),s-3代表液壓系統(tǒng),s-4代表冷氣系統(tǒng),s-5代表操縱系統(tǒng),s-6代表飛控系統(tǒng),s-7代表起落裝置,s-8代表生命保障系統(tǒng),s-9代表電源電氣系統(tǒng),s-10電子對抗系統(tǒng),s-11代表武器系統(tǒng),s-12代表發(fā)控系統(tǒng)。
根據以上分析,設計基于任務要求和狀態(tài)信息的部件參數信息預測方法,具體步驟如下:
步驟1 對作戰(zhàn)任務進行分析,根據作戰(zhàn)任務包含的任務剖面確對應的關鍵部件可用集合S表示,S=(S1, …Si, …,Sn),其中Si為第i個系統(tǒng),Si=(s1, …sj, …,sn),sj為i個系統(tǒng)里的第j個部件;
步驟2 分析關鍵部件的主要特征參數,進一步確定需要采集的相關狀態(tài)信息Xi=(x1, …xj, …,xn),Xi為第i個部件的狀態(tài)信息集;

步驟4 按照1.2節(jié)的(1)和(2)部分對DBN網絡訓練;
步驟5 用已知數據對DBN網絡進行驗證;
步驟6 用已監(jiān)測到的飛參數據作為輸入向量,對未來狀態(tài)信息進行預測;
步驟7 通過預測出的狀態(tài)信息,判斷關鍵部件的健康狀態(tài)。
根據以上分析可知,基于SA和DBN的軍用飛機狀態(tài)參數預測流程可如圖4所示。
圖4中,基于SA和DBN的網絡結構和運算過程由圖2和圖3所示的流程實現(xiàn)。
2 案例分析
假定某次執(zhí)行任務包含剖面p-4,各系統(tǒng)的完好情況如表1第5行所示,在此以動力系統(tǒng)為例對其健康狀態(tài)進行分析。
首先通過1.2節(jié)(3)部分設計的方法選定發(fā)動機狀態(tài)檢測參數,進而設計網絡輸入樣本。
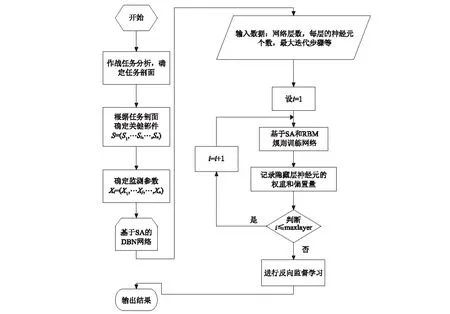
圖4 基于SA和DBN的軍用飛機狀態(tài)參數預測流程Fig.4 Military aircraft components state parameterprediction Process based on SA and DBN
航空發(fā)動機的狀態(tài)監(jiān)測參數主要包括[25-26]:氣路監(jiān)測、滑油監(jiān)測和振動監(jiān)測三部分,具體參數有渦輪后燃氣溫度、燃油流量、滑油的壓力、滑油溫度、滑油消耗率、低壓轉子振動值偏差和高壓轉子振動值偏差等。
論文以某型發(fā)動機為例進行狀態(tài)預測,該發(fā)動機主要監(jiān)測數據有發(fā)動機扭矩、發(fā)動機轉速、排氣溫度發(fā)動機滑油壓力、滑油溫度和燃油瞬時流量等參數。
其數據來源為該型機的飛參數據系統(tǒng),飛行參數系統(tǒng)是對飛機在飛行過程中,對飛行操縱量、姿態(tài)量、飛行環(huán)境參數、部(附)件監(jiān)測信息等狀態(tài)信息的綜合信息系統(tǒng)[27],可以為論文的數據采集工作提供有力支撐(見圖5)。
圖5 飛參信息系統(tǒng)Fig.5 Aircraft flying parameter information system
按照1.2節(jié)(3)設計的方法,將飛參系統(tǒng)采集監(jiān)測數據信息記為X=(x1,x2, …,x6),分別代表發(fā)動機扭矩、發(fā)動機轉速、燃氣溫度發(fā)動機滑油壓力、滑油溫度和燃油瞬時流量。
人工神經網絡具有并行處理、聯(lián)想記憶、分布式知識存貯、強魯棒性等特點,在非線性系統(tǒng)的辨識和控制中得到了廣泛應用,其中ELMAN神經網絡在系統(tǒng)預測方面有較多的工程應用,分別實現(xiàn)了空調負荷、地震等級預測、交通運輸能力預測和電力系統(tǒng)負荷預測等問題[28-29];支持向量機是基于統(tǒng)計學習理論構建的典型神經網絡,在故障診斷和預測方面也有較好的應用[30-32]。
為了驗證文中設計方法的精確性和快速收斂性,分別采用SVM、ELMAN和深度網絡對表2中的樣本訓練網絡。將表2中每70組數據作為一組輸入,對第71的數據進行預測,即第1~70組為輸入數據,第71~100組為訓練目標,表中共有1 000組數據,其中第1~900組數據作為訓練樣本,第900~1 000組作為測試數據。
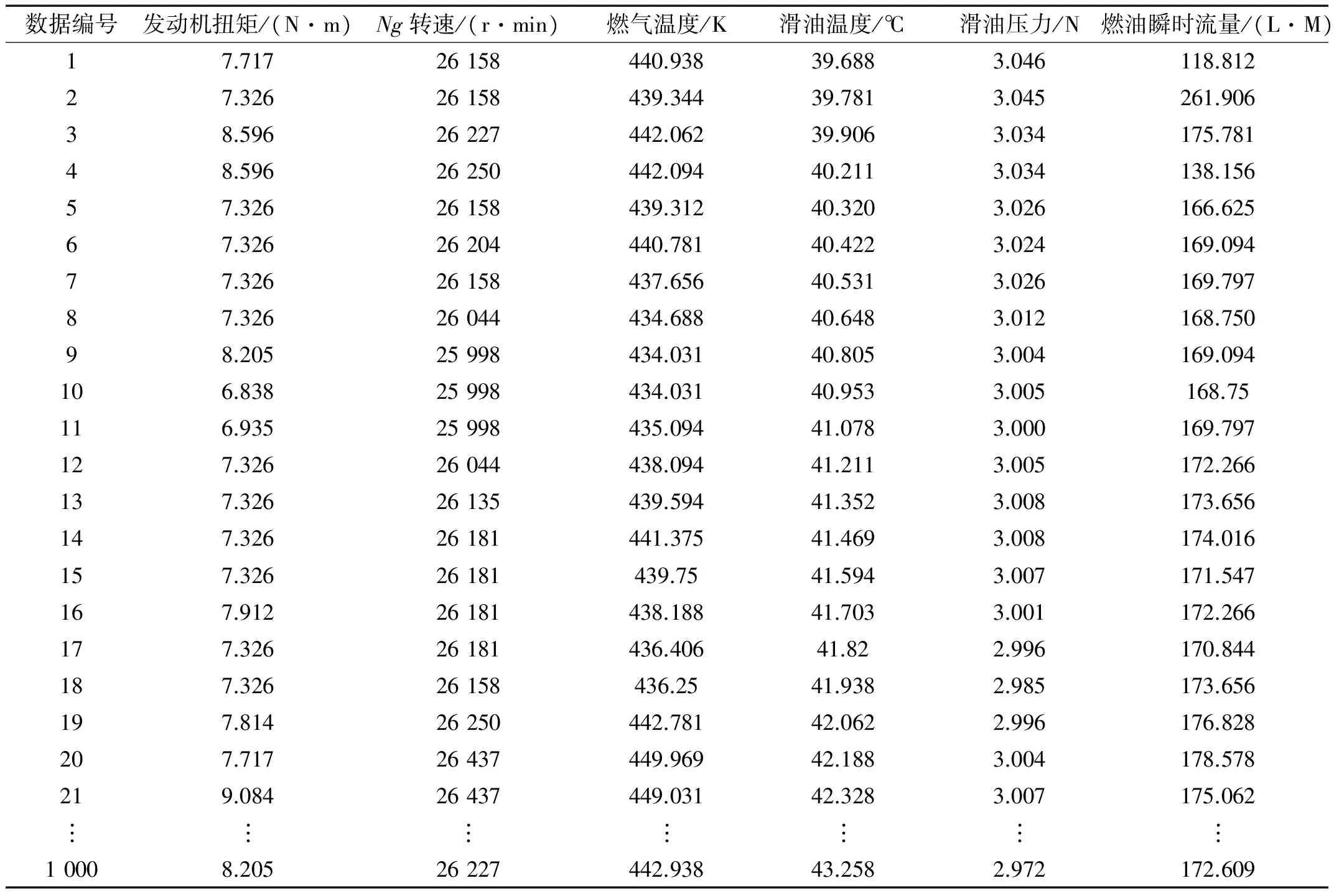
表2 樣本數據
DBN算法中的參數由第1節(jié)設計方法確定,RBN選擇4層,輸入層和輸出層神經元為6個,隱藏層每個神經元數量為100,在每個RBM和反向學習過程中的最大迭代步驟設為50;ELMAN網絡的輸入和輸出層激活函數“tansig”和“purelin”,根據kolmogorov定理確定Elman網絡隱藏層神經元數量;SVM采用高斯核函數。
采用matlabR2010編程實現(xiàn),在配置為Windows-7旗艦版windows-32系統(tǒng),inter(R) core i3-200CPU,3.10 Hz, RAM4.0 GB的計算機上運行程序,當參數預測結果和實測結果之差小于0.04時,認為預測結果正確,計算測試數據的預測值和實測值的正確率如表3所示。
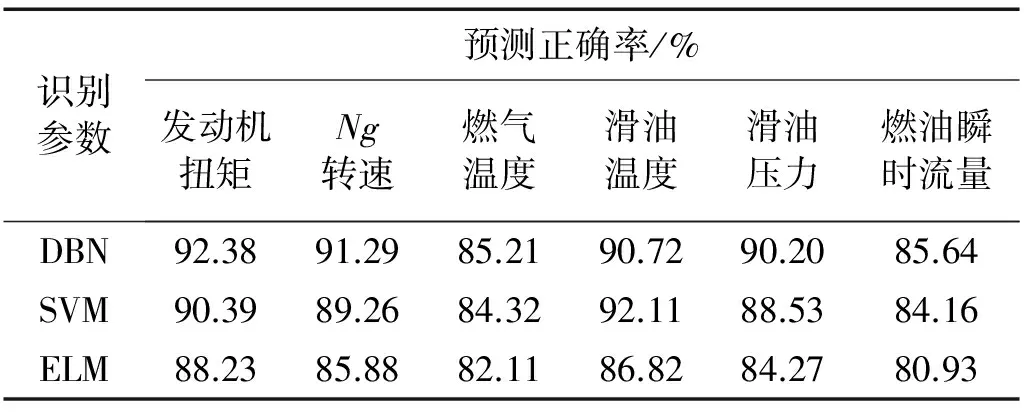
表3 不同算法的預測結果對比
由表3可知,DBN算法的預測精度最高,SVM次之,ELM預測精度最低。在DBN網絡中,RBN單元是一種隨機概率網絡,在網絡訓練過程中模擬了樣本數據的概率分布特性,另外通過模擬算法通過T的控制作用,使得網絡權值梯度(各層之間能量差)有規(guī)律的降低,不容易使網絡陷入局部最優(yōu),提高訓練精度。
在此采取DBN算法對發(fā)動監(jiān)測參數進行預測,來對發(fā)動的狀態(tài)信息分析,以表2中的第900~970組數據為樣本數據,輸入數據維數為70×6,輸出維數為6,通過第901~970組數據預測第971組,并且將預測結果作為新的971組,用第902~971組預測第972組,以此類推,預測步長設定為30,對未來各項狀態(tài)信息進行預測,其結果如圖6~圖11所示。
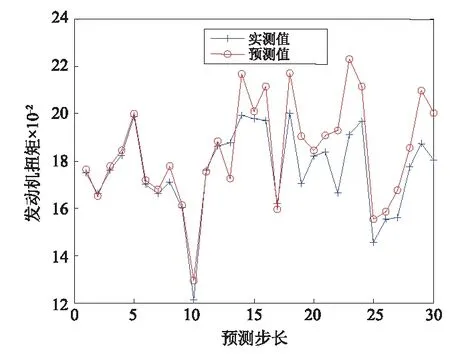
圖6 發(fā)動機扭矩預測Fig.6 The prediction value of engine torque
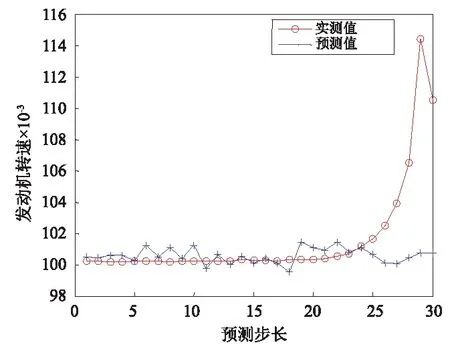
圖7 發(fā)動機轉速預測值Fig.7 The prediction value of engine rotate speed
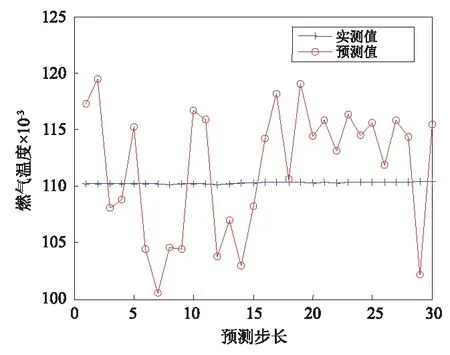
圖8 發(fā)動機燃氣溫度Fig.8 The prediction value of engine jet temperature
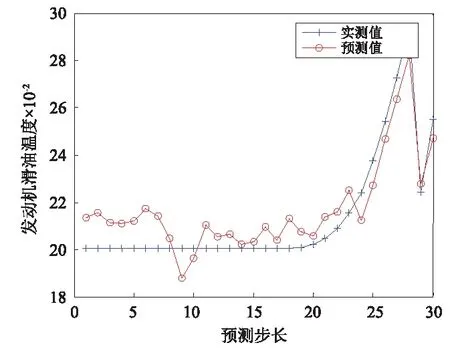
圖9 發(fā)動機滑油溫度Fig.9 The prediction value of engine lubricating oil temperature
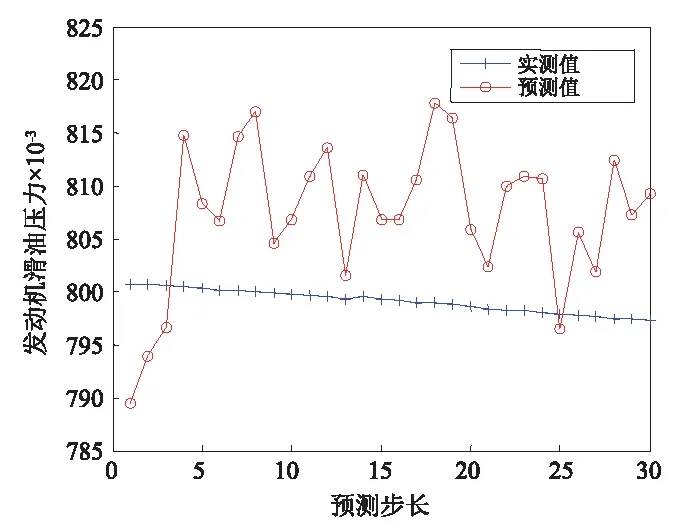
圖10 發(fā)動機滑油壓力Fig.10 The prediction value of engine lubricating oil pressure
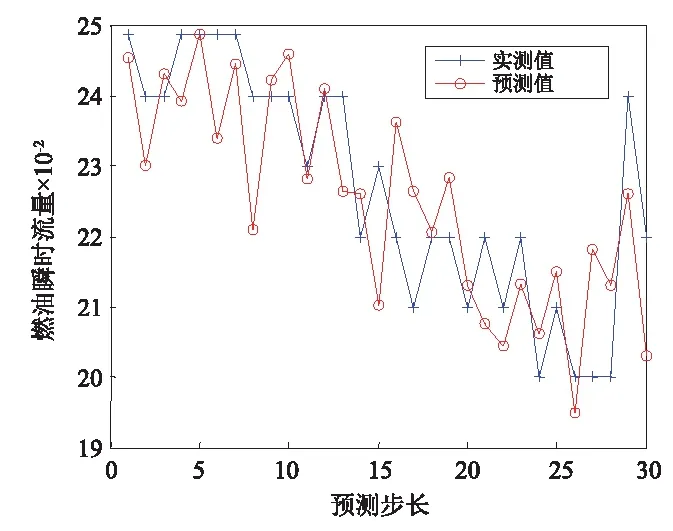
圖11 發(fā)動機燃油瞬時流量Fig.11 The prediction value of engine fuel instantaneous flow
圖6、圖7、圖9和圖11中預測數值與實測值走勢一致,且誤差小于0.02,圖8和圖10中,發(fā)動機燃氣溫度和滑油壓力的預測數值的趨勢與實測值不太一致,波動較大,有出現(xiàn)故障的征兆,應當重點監(jiān)控,在維修過程中對相應的部件系統(tǒng)加強檢查。
3 結 論
文章設計方法可以有效預測軍用飛機關鍵部件的狀態(tài)參數信息,狀態(tài)參數預測的正確率高于SVM和ELMAN網絡,預測誤差小于0.04。證明深度網絡可以實現(xiàn)對復雜系統(tǒng)狀態(tài)信息的多步預測,且預測精度較高。該方法在工程上有較強的應用性,預測結果可以作為軍用飛機部件可靠性分析和制定預防性維修計劃的參考依據。同時,也是深度學習理論在健康管理研究領域的進一步探索。
[ 1 ] 彭宇, 劉大同. 數據驅動故障預測和健康管理綜述[J].儀器儀表學報, 2014, 35(3): 481-495.
PENG Yu, LIU Datong. Data-driven prognostics and health management: a review of recent advances[J]. Chinese Journal Scientific Instrument, 2014, 35(3): 481-495.
[ 2 ] 李向前. 復雜裝備故障預測與健康管理關鍵技術研究[D]. 北京: 北京理工大學, 2014: 6-12.
[ 3 ] 王少萍. 大型飛機機載系統(tǒng)預測與健康管理技術[J]. 航空學報, 2015, 35(6): 1459-1472.
WANG Shaoping. Prognostics and health management key technology of aircraft airborne system[J]. Acta Aeronautica et Astronautica Sinica, 2015, 35(6): 1459-1472.
[ 4 ] 趙宇.可靠性數據分析[M]. 北京: 國防工業(yè)出版社, 2011: 33-55.
[ 5 ] 周忠寶, 馬超群, 周經倫. 基于動態(tài)貝葉斯的動態(tài)故障樹分析[J]. 系統(tǒng)工程理論與實踐, 2008, 32(2): 36-42.
ZHOU Zhongbao, MA Chaoqun. Dynamic fault tree analysis based on dynamic Bayesian networks[J]. Systems Engineering Theory &Practice, 2008, 32(2): 36-42.
[ 6 ] MIRIKITANI D T,NIKOLAEV N. Recursive bayesian recurrent neural networks for time-series modeling[J]. IEEE Transactions on Neural Networks, 2010, 21(2): 262-274.
[ 7 ] ZHAO W G,WANG J Z, LU H Y. Combining forecasts of electricity consumption in China with time-varying weights updated by a high-order Markov chain model[J]. Journal of Management Science, 2014, 45: 80-91.
[ 8 ] SAPANKEVYCH N,SANKAR R. Time series prediction using support vector machines: a survey[J]. Computational Intelligence Magazine, 2009, 4(2): 24-38.
[ 9 ] 徐圓,劉瑩,朱群雄. 基于多元時滯序列驅動的復雜過程故障預測方法應用研究[J]. 化工學報, 2013,64(12): 4290-4295.
XU Yuan, LIU Ying, ZHU Qunxiong. A complex process fault prognosis approach based on multivariate delayed sequences[J]. CIESC Journal, 2013, 64 (12): 4290-4295.
[10] MIRIKITANI D T,NIKOLAEV N. Recursive bayesian recurrent neural networks for time-series modeling[J]. IEEE Transactions on Neural Networks,2010,21(2): 262-274.
[11] GONCALVES L F,BOSA J L,BALEN T R,et al. Fault detection, siagnosis and prediction in electrical valves using self-organizing maps[J]. Journal of Electronic Testing, 2011, 27(4): 551-564.
[12] 張琪, 吳亞鋒, 李鋒. 基于遺傳神經網絡的旋轉機械故障預測方法研究[J]. 計算機測量與控制, 2016, 24(2): 11-13.
ZHANG Qi, WU Yafeng, LI Feng. Research on mechanical fault prediction based on improved neural network[J]. Computer Measurement & Control, 2016, 24(2): 11-13.
[13] 李瑞瑩, 康銳. 基于神經網絡的故障率預測方法[J]. 航空學報, 2008, 29(2): 357-362.
LI Ruiying, KANG Rui. Failure rate forecasting method based on neural networks[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(2): 357-362.
[14] 張磊,李行善,于勁松. 一種基于二元估計與粒子濾波的故障預測算法[J]. 北京航空航天大學學報, 2008, 34(7): 798-802.
ZHANG Lei, LI Xingshan, YU Jinsong. Fault prognostic algorithm based on dual estimation and particle filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(7): 798-802.
[15] 蔡志強, 孫樹棟, 司書賓, 等. 基于FMECA的復雜裝備故障預測貝葉斯網絡建模[J]. 系統(tǒng)工程理論與實踐, 2013, 33(1): 187-192.
CAI Zhiqiang, SUN Shudong, SI Shubin, et al. Modeling of failure prediction bayesian network based on FMECA[J]. Systems Engineering Theory &Practice, 2013, 33(1): 187-192.
[16] HINTON G E,SALAKHUTDINOV R R. Reducing the dimensionality of data with neural networks[J]. Science, 2006, 313 :504-507.
[17] AREL L, ROSE D C, KARNOWSKI T P. Deep machine learning a new frontier in artificial intelligence research[J]. Computational Intelligence Magazine, 2010, 5(4): 8-13.
[18] 郭麗麗, 丁世飛. 深度學習研究進展[J]. 計算機科學, 2015, 42(5): 28-33.
GUO Lili, DING Shifei. Research progress on deep learning[J]. Computerscience, 2015, 42(5): 28-33.
[19] PRASANNA T, PINGFENG W. Failure diagnosis using deep belief learning based health state classification[J]. Reliability Engineering and System Safety, 2013, 115(7): 124-135.
[20] 雷亞國, 賈峰, 周昕, 等. 基于深度學習理論的機械裝備大數據健康檢測方法[J]. 機械工程學報, 2016, 51(21): 49-56.
LEI Yaguo, JIA Feng, ZHOU Xin, et al. A deep learning-based method for machinery health monitoring with big data[J]. Journal of Mechanical Engineering, 2016, 51(21): 49-56.
[21] 馮通. 基于深度學習的航空飛行器故障自助檢測研究[J]. 計算機仿真, 2015, 32(11): 119-122.
FENG Tong. A fault detection algorithm of aviation aircraft based on deep learning[J]. Computer Simulation, 2015,32(11): 119-122.
[22] HINTON G E. A practical guide to training restricted Boltzmann machines[J] . Momentum, 2012, 9(1): 599-
619.
[23] LEE H, GROSSE R, NG A Y. Convolutional deep belief networks for scalable unsupervised learning of hierarchical representations[C] ∥International Conference on Machine Learning. Montreal: ICML, 2009: 609-616.
[24] 王利民,馬乃倉. 軍用飛機最低技術放飛條件邏輯決斷分析方法研究[J]. 計算機與現(xiàn)代化, 2012 (10): 200-206.
WANG Limin, MA Naicang. Study on logic decision method of making military aircraft minimum technique flight condition[J]. Computer and Modern, 2012 (10): 200-206.
[25] 孫闖,何正嘉,張周鎖,等. 基于狀態(tài)信息的航空發(fā)動機運行可靠性評估[J]. 機械工程學報, 2013, 49(6): 30-37.
SUN Chuang, HE Zhengjia, ZHANG Zhousuo, et al. Operating reliability assessment for aero-engine based on condition monitoring information[J]. Journal of Mechanical Engineering, 2013, 49(6): 30-37.
[26] 王華偉,高軍,吳海橋. 基于競爭失效的航空發(fā)動機剩余壽命預測[J]. 機械工程學報, 2014, 50(6): 197-205.
WANG Huawei, GAO Jun, WU Haiqiao. Residual remaining life prediction based on competing failures for aircraft engines[J]. Journal of Mechanical Engineering, 2014, 50(6): 197-205.
[27] 唐崇凱, 曲建嶺,高峰. 飛參判據及應用[J]. 計算機工程, 2011, 37(10): 280-283.
TANG Chongkai, QU Jianling, GAO Feng. Flight data criterion and its application[J]. Computer Engineering, 2011, 37(10): 280-283.
[28] 李軍亮, 胡國才. 基于ELMAN網絡的某型直升機飛行狀態(tài)識別[J]. 火力與指揮控制,2015, 40(12): 57-60.
LI Junliang, HU Guocai. Helicopter flight condition recognition based on elman neural network[J]. Fire Control & Command Control, 2015, 40(12): 57-60.
[29] 李國勇,楊麗娟. 神經, 模糊, 預測控制及其MATLAB 實現(xiàn)[M]. 北京:電子工業(yè)出版社, 2013: 85-127.
[30] 徐玉秀, 楊文平, 呂軒, 等. 基于支持向量機的汽車發(fā)動機故障診斷研究[J]. 振動與沖擊, 2013, 32(8): 143-146.
XU Yuxiu, YANG Wenping, Lü Xuan, et al. Fault diagnosis for a car engine based on support vector machine[J]. Journal of Vibration and Shock, 2013, 32(8): 143-146.
[31] 袁勝發(fā), 儲福磊. 支持向量機及其在故障診斷中的應用[J]. 振動與沖擊, 2007, 26(11): 29-35.
YUAN Shengfa, CHU Fulei. Support vector machine and its application in machine fault diagnosis[J]. Journal of Vibration and Shock, 2007, 26(11): 29-35.
[32] 陳昌,湯寶平,呂中亮. 基于威布爾分布極最小向量機的滾動軸承退化趨勢預測[J]. 振動與沖擊, 2014, 33(2): 52-56.
CHEN Chang, TANG Baoping, Lü Zhongliang. Degradation trend prediction of rolling bearings based on weibull distribution and least squares support vector machine[J]. Journal of Vibration and Shock, 2014, 33(2): 52-56.
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15