低成本高可靠永磁無刷直流電機伺服控制系統設計
2018-03-31 12:22:42呼明亮嚴會會
電腦知識與技術 2018年6期
關鍵詞:保護
呼明亮 嚴會會

摘要:該文所設計的永磁無刷直流電機伺服控制系統采用sT公司的8位低成本高性能單片機STM8S105實現電機控制算法,功率驅動電路采用TI公司的DRV8301芯片實現功率驅動電路和控制器工作電源變換,采用LTC公司的電源專用芯片LTC4364-1實現電源過壓、欠壓和過流故障保護,并配置位置傳感器,可滿足高精度伺服控制需求。實驗結果表明,該文設計的系統具備結構簡單、成本低、可靠性高的特性,可廣泛應用于中低壓永磁無刷直流電機伺服控制系統。
關鍵詞:永磁無刷直流電機;驅動;保護;可靠性
中圖分類號:TP202 文獻標識碼:A 文章編號:1009-3044(2018)06-0192-03
永磁無刷直流電機因其結構簡單、啟動力巨大、調速性能好、功率密度高、易維護等諸多優點,而被廣泛應用于工業控制、精密儀器、機器人、電動汽車、航空航天等領域。傳統的永磁無刷直流電機驅動系統硬件電路一般采用分立器件或功率驅動模塊(IPM)方式實現,其電路設計復雜、體積大、可靠性低和靈活性較差,同時其價格較為昂貴,不適用于批量生產。
本文設計了一套低成本、高可靠永磁無刷直流電機伺服控制系統,控制器采用ST公司的8位高性能單片機STM8S105實現電機控制算法,功率驅動電路采用TI公司的DRV8301芯片實現功率驅動電路和控制器工作電源變換,采用LTC公司的電源專用芯片LTC4364-1實現電源過壓、欠壓和過流故障保護,系統配置電機電流檢測模塊、輸出狀態采集模塊、霍爾位置傳感器采集模塊和正交編碼器位置狀態采集模塊,用于提高電機控制精度和可靠性,電路設計簡潔、完備,通用性好,擴展性強,可廣泛應用于中低壓永磁無刷直流電機伺服控制系統。
1總體設計
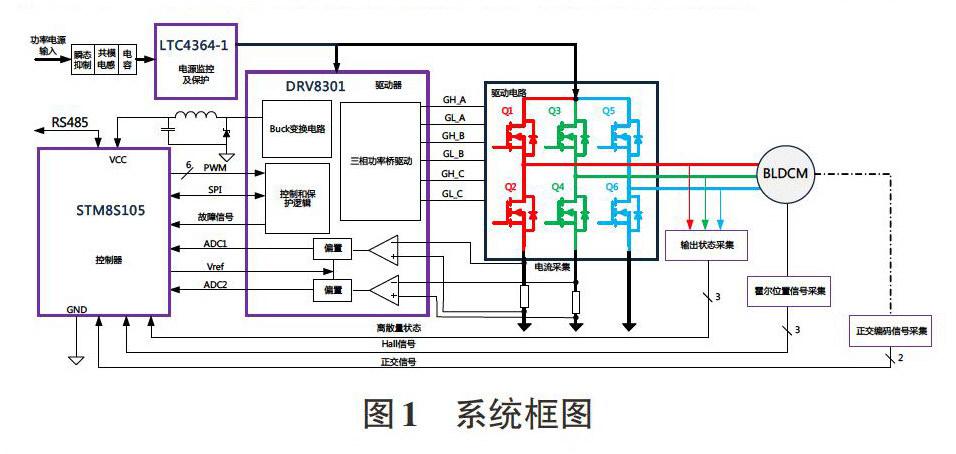
永磁無刷直流電機伺服控制系統框圖如圖1所示,系統主要包括電機控制器模塊、三相功率橋驅動模塊、功率模塊、霍爾位置傳感器檢測模塊和輸出狀態采集模塊。控制器通過RS485通訊總線接收上位機發送的電機轉動命令,依據霍爾位置傳感器和正交編碼器輸出的轉子位置進行邏輯運算,并結合電機電流產生PWNM功率驅動信號,經驅動器和功率模塊變換實現功率信號放大,作用至電機繞組,控制電機按照給定轉速和轉動方向轉動,實現精確伺服控制。控制過程中,電源監控模塊實時監控功率電源過壓、欠壓和過流狀態,實現功率電路保護。輸出狀態采集模塊周期監控功率電路輸出狀態,參與BIT邏輯運算,實現電機故障診斷。
2硬件設計
2.1控制器電路設計
控制器電路的主要功能是結合電機位置狀態反饋信號、電機相電壓、相電流等信號實現電機控制算法。本文采用意法半導體公司專門針對電機控制推出的8位高性價比單片機STM8S105實現電機算法控制。圖2所示為控制器最小系統。
其工作頻率可達16MHz,寬電壓工作:2.95V-5.5V,溫度范圍-40℃~125℃,采用三級流水線哈佛架構,具備豐富的外設資源,包括7通道10位A/D轉換器,轉換時間小于5微秒,1路SPI接口,1路PC接口,配置25路獨立通用輸入輸出接口,芯片開發資源豐富,技術支持完備,且價格低廉,特別適用于低成本、高性能永磁無刷直流電機伺服控制系統開發。
芯片配置4路定時器,其中定時器1為16位高性能控制定時器,利用其互補輸出、死區控制和中心對齊PWM方式,該定時器可被用于產生PWM斬波信號,定時器1發出的PWM信號經功率驅動電路作用至上橋功率管,GPIO發出的控制信號經功率驅動電路作用至下橋功率管。
2.2驅動電路設計
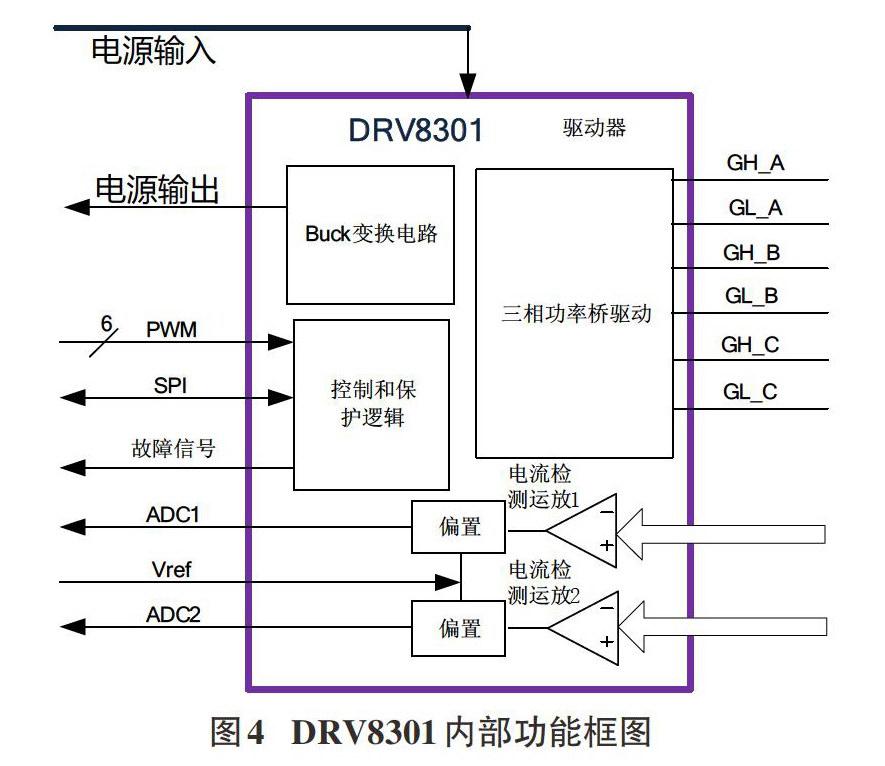
驅動電路的主要功能是將控制器發出的驅動信號,經放大,控制功率MOSFET開通和關斷,為電機提供三相電流。DRV8301是11公司專門針對三相電機驅動應用的柵極驅動器,芯片內部集成死區電路,具備電源電壓欠壓、過壓保護,電流過流、過熱保護等功能,保證系統可靠工作。芯片可驅動6路N溝道MOSFET場效應管,支持寬電壓范圍(6V到60V)工作,最大峰值灌電流2.3A,拉電流1.7A。芯片運用自舉技術簡化了硬件結構,省去了多路輔助電源。DRV8301驅動芯片內部功能框圖如圖4所示,主要包括Buck變換電路、控制和保護邏輯、三相功率橋驅動和兩路電流檢測運放。
DRV8301內部集成了Buck變換電路,與TPS54160功能相同,供外部控制器或其他模塊供電,驅動能力為1.5A。Buck變換電路與芯片內部其他功能獨立,驅動電路故障情況時,電源芯片正常工作,保證了系統的可靠工作。DRV8301還包括兩路電流檢測放大電路,實現電機相電流的精確放大,運放通過偏執電壓設置,支持雙向電流檢測,運放檢測電路可通過SPI實現放大增益配置,從而滿足不同電壓范圍采集要求,提高采集精度。
2.3電源監控電路設計
永磁無刷直流電機伺服控制系統中,電源必須支持短暫持續時間的高壓浪涌,同時必須對電機負載實現過電壓瞬變的保護,并提供繼續運行能力。系統選用凌力爾特公司的專用芯片LTC4364實現。LTC4364專為抑制高壓浪涌和抑制輸出電壓而設計,具有理想二極管特性,保護負載免遭高電壓瞬變的損壞。LTC4364芯片的HGATE管腳驅動N溝道MOSFET(V1),以限制電源瞬變或過流過程中輸送至負載電路的電壓和電流。正常情況下處于導通狀態,并提供低阻抗通路;而在過壓和過流情況下負責耗散功率。DGATE管腳驅動另一個N溝道MOSFET(V2),替代實現反向輸出保護和輸出電壓保持功能的肖特基二極管,實現電源輸入防反保護,并在輸入短路時,隔斷反向電流。LTC4364通過監測SENSE引腳和OUT引腳之間的電阻電壓,實現過流保護,當二者之間的電壓差大于50mV時,將關斷V1場效應管。LTC4364可精確地監視輸入電源的過壓(0V)和欠壓(UV)情況,計算公式分別為公式(1)和公式(2)。LTC4364電路原理如圖5所示。
2.4位置信號采集電路設計
永磁無刷直流電機伺服控制系統低速時速度和位置測量容易失真,系統一般結合霍爾傳感器和光柵編碼器(磁編碼器或旋轉變壓器)實現電機轉速范圍位置、速度和加速度狀態信息反饋。系統選用MAXON公司的4096CPT,雙通道線性正交編碼器作為速度和位置反饋,電路交聯圖如圖6所示,正交編碼器發出的差分信號,經SM3490轉換后送入FPGA,FPGA依據A、B信號間的相位關系,判斷電機轉動方向,通過計算A、B信號的頻率,獲取電機轉速,通過記錄A、B信號的脈沖個數,獲取電機絕對位置。
3軟件設計
永磁無刷直流電機伺服控制系統通過實時采集電機位置、速度和電流信號,實現電機精確伺服控制,系統通過定時器TIM1實現PWM脈寬調制,達到對電機的穩定控制,整個控制系統軟件包括主程序和中斷服務程序等。主程序用來完成控制系統的時鐘、I/O端口、定時器等部件的初始化、電機運行和故障診斷等工作。中斷程序中通過讀取三個霍爾傳感器狀態獲取電機轉子的位置信息,查表1獲得換向邏輯,中斷服務程序軟件流程圖如圖7所示。
4實驗
實驗采用MAXON公司的三相永磁無刷直流電機EC60作為被控對象,參數如下:額定功率PN=1,5kW,相電流Iph=2.4A,極對數P=7,額定轉速600r/min,定子相電感L=1.4mH,電子相電阻R=0.504Ω,轉矩常數KT=0.132N/mA。圖8所示為電機相電壓波形,圖9所示為電機相電流波形,實驗結果證明,本文設計的控制系統能夠滿足永磁無刷直流電機伺服控制要求。
5結論
本文所設計的永磁無刷直流電機伺服控制系統采用ST公司的8位高性能單片機STM8S105實現電機控制算法,功率驅動電路采用TI公司的DRV8301芯片實現功率驅動電路和控制器工作電源變換,采用LTC公司的電源專用芯片LTC4364-1實現電源過壓、欠壓和過流故障保護,并配置位置傳感器,可滿足高精度伺服控制需求。本文設計的系統具備結構簡單、成本低、可靠性高的特性,可廣泛應用于中低壓永磁無刷直流電機伺服控制系統。
猜你喜歡
文藝生活·下旬刊(2016年10期)2016-11-03 23:46:09
中國科技博覽(2016年22期)2016-11-01 18:31:37
中國科技博覽(2016年22期)2016-11-01 14:13:55
戲劇之家(2016年19期)2016-10-31 17:15:56
軟件工程(2016年8期)2016-10-25 15:58:54
科技視界(2016年22期)2016-10-18 16:17:50
現代園藝(2016年17期)2016-10-17 08:49:07
現代園藝(2016年17期)2016-10-17 07:58:52
科學與財富(2016年28期)2016-10-14 04:54:47
環球時報(2013-07-27)2013-07-27 09:28:54
