基于MPC的重型液罐車側(cè)向穩(wěn)定性控制仿真
2018-06-29 00:34:00于志新程新新李紹松
長春工業(yè)大學(xué)學(xué)報 2018年3期
關(guān)鍵詞:模型
于志新, 程新新, 李 杰, 李紹松
(1.長春工業(yè)大學(xué) 機(jī)電工程學(xué)院, 吉林 長春 130012;2長春工業(yè)大學(xué) 汽車工程研究院, 吉林 長春 130012)
0 引 言
我國公路運輸線四通八達(dá),各種油品、危化品主要依靠半掛液罐車運輸,液罐車具有裝載量大、運輸成本低的特點,逐漸成為公路運輸?shù)闹黧w。因其具有載量大、重心高、輪距相對較小等特點,并且在轉(zhuǎn)向或變道過程中罐內(nèi)液體易受激勵產(chǎn)生晃動,與車體的耦合運動會導(dǎo)致車輛發(fā)生側(cè)傾失穩(wěn),這在道路運輸是極其危險的狀況。國內(nèi)外學(xué)者針對罐車側(cè)傾問題在罐內(nèi)液體晃動分析和罐內(nèi)結(jié)構(gòu)優(yōu)化上做了大量研究[1-6],但液體的晃動對整車的側(cè)向穩(wěn)定性分析相對較少。因此,通過對罐車實施主動安全控制,提高液罐車的穩(wěn)定性是一種更適用和高效的方法[7-11]。
1 液體晃動分析
以某專用汽車制造廠生產(chǎn)的44 m3半掛液罐車為分析對象,考慮到罐體長度相對較長,忽略罐車兩端封頭以及內(nèi)部附加結(jié)構(gòu)影響,并且罐車在平直路面上轉(zhuǎn)彎或避障時,罐體內(nèi)的軸向運動視為不變,因此選取單位長度上罐體進(jìn)行建模分析,并作如下假設(shè):
1)液體為理想不可壓縮的;
2)不考慮罐內(nèi)氣體的影響;
3)不考慮罐體的變形。
罐內(nèi)液體坐標(biāo)系如圖1所示。

圖1 罐內(nèi)液體坐標(biāo)系
圖中:x----車輛行駛方向;
y----駕駛員左側(cè);
z----豎直向上;
Ω----流體域;
Σ----罐體濕表面;
S----自由面液度;
h0----液面到x軸距離;
θ0----自由液面和罐體交點與坐標(biāo)原點連線同z負(fù)半軸的夾角。
液體在罐內(nèi)的運動方程滿足以下三個條件:
1)在Ω內(nèi)連續(xù);
2)在Σ內(nèi)不可滲透;
3)在S上滿足運動學(xué)和動力學(xué)條件。
得到以下方程:
(1)
流體勢函數(shù)分解為液體隨罐體運動而產(chǎn)生的剛性分量φu(r,θ,t)以及液體晃動產(chǎn)生的動壓力分量φs(r,θ,t)兩個子函數(shù)和的形式[12]:
φ=φs(r,θ,t)+φu(r,θ,t)
(2)
其中,φu(r,θ,t)和φs(r,θ,t)都滿足式(1),可以得到

液體自由晃動時,令
φ=iσΦ(r,θ)eiσt
η=H(r,θ)eiσt
則式(1)可化為:
(3)
式中:Φ----晃動模態(tài)函數(shù);
H----波高模態(tài)函數(shù);
ω----液體自由晃動特征頻率。
運用Galerkin法求出上式中的ω和Φ。
當(dāng)罐體中的液體被動晃動時,自由晃動模型同樣適用于受迫晃動。
令φ、η為自由晃動特征模態(tài)Φ、H的線性組合,即:
(4)
式中:qi(t)----廣義坐標(biāo)。
將式(4)代入式(1)中,并消去η得
(5)
對上式同乘ρHi,然后在S上作積分,便可得到以下的積分形式:

(6)
其中
液體晃動時,前面已假設(shè)液體為理想的不可壓縮的流體,忽略了液體之間的相互作用力。但實際上液體之間還有一定的阻尼作用,且無法忽略,于是為簡化計算,可在方程中加入比例阻尼項,即:
C=?0M+?1K
(7)
其中,?0,?1為常數(shù)。式(6)變?yōu)?/p>

(8)
滿足精度要求的條件下,截取式(8)一定階數(shù)的近似計算。求解qi(t),即可得到
(9)
2 液體側(cè)向晃動力影響分析
2.1 側(cè)向晃動受力分析
液體之間存在流體力和流體勢,根據(jù)兩者之間函數(shù)關(guān)系可解出與液體對罐車內(nèi)壁上的力。流體壓強(qiáng)為:
式中:z′----自由液面到所求點的垂直距離。
對單位長度上的靜、動壓力在罐體長度上積分得到罐體的慣性力Fu、動壓力Fs:

(10)
則作用在罐體上的側(cè)向合力為:
(11)
其中
Gi=ρ21-iR1-iZiL
2.2 充液比對液體晃動的影響
液罐車罐內(nèi)液體與罐體參數(shù)如下:
1)液體密度:ρ=580 kg/m3;
2)罐體半徑:R=1.5 m;
3)罐體長度:L=12 m。
充液比λ為液體高度與罐體半徑的比,截取式(8)的前四階,計算出在不同充液比下罐體受液體慣性作用力Fu、液體晃動作用力Fs以及兩者的合力Fh。側(cè)向受力隨充液比的變化如圖2所示。
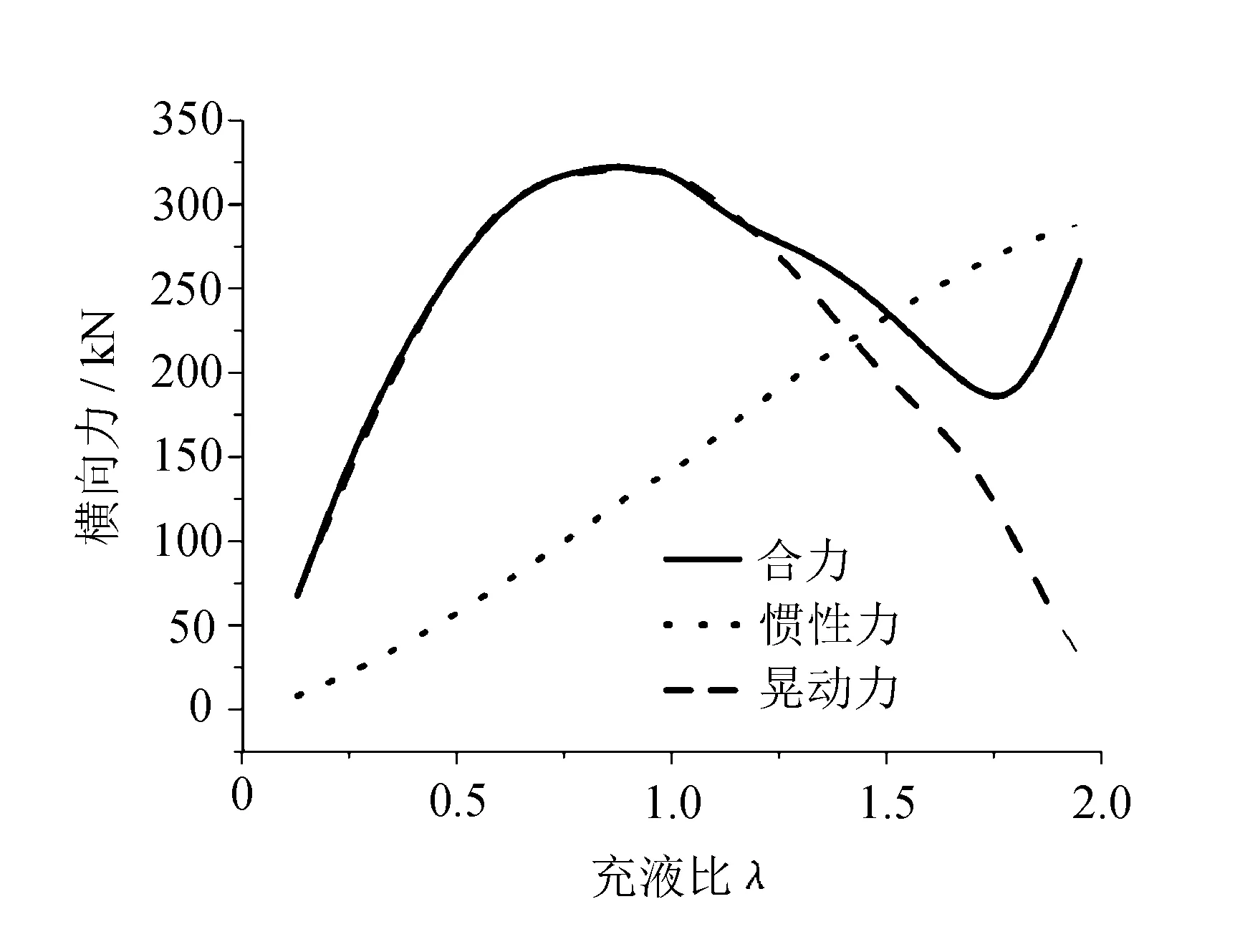
圖2 側(cè)向受力隨充液比的變化圖
由圖2可知,在λ∈[0,1]內(nèi),充液比與慣性力之間呈線性關(guān)系,逐漸升高。慣性力在λ=1時達(dá)到最大值;在圖中晃動力如同慣性力一樣呈現(xiàn)出先增大后減小的趨勢;而二者的合力在充液比小時與晃動力表現(xiàn)出相同的變化趨勢,并在充液比λ=1.5時,因慣性力作用越來越明顯,合力反而表現(xiàn)出不減反增的趨勢,但未超過晃動最為劇烈時的最大值。
2.3 側(cè)向加速度對液體晃動的影響
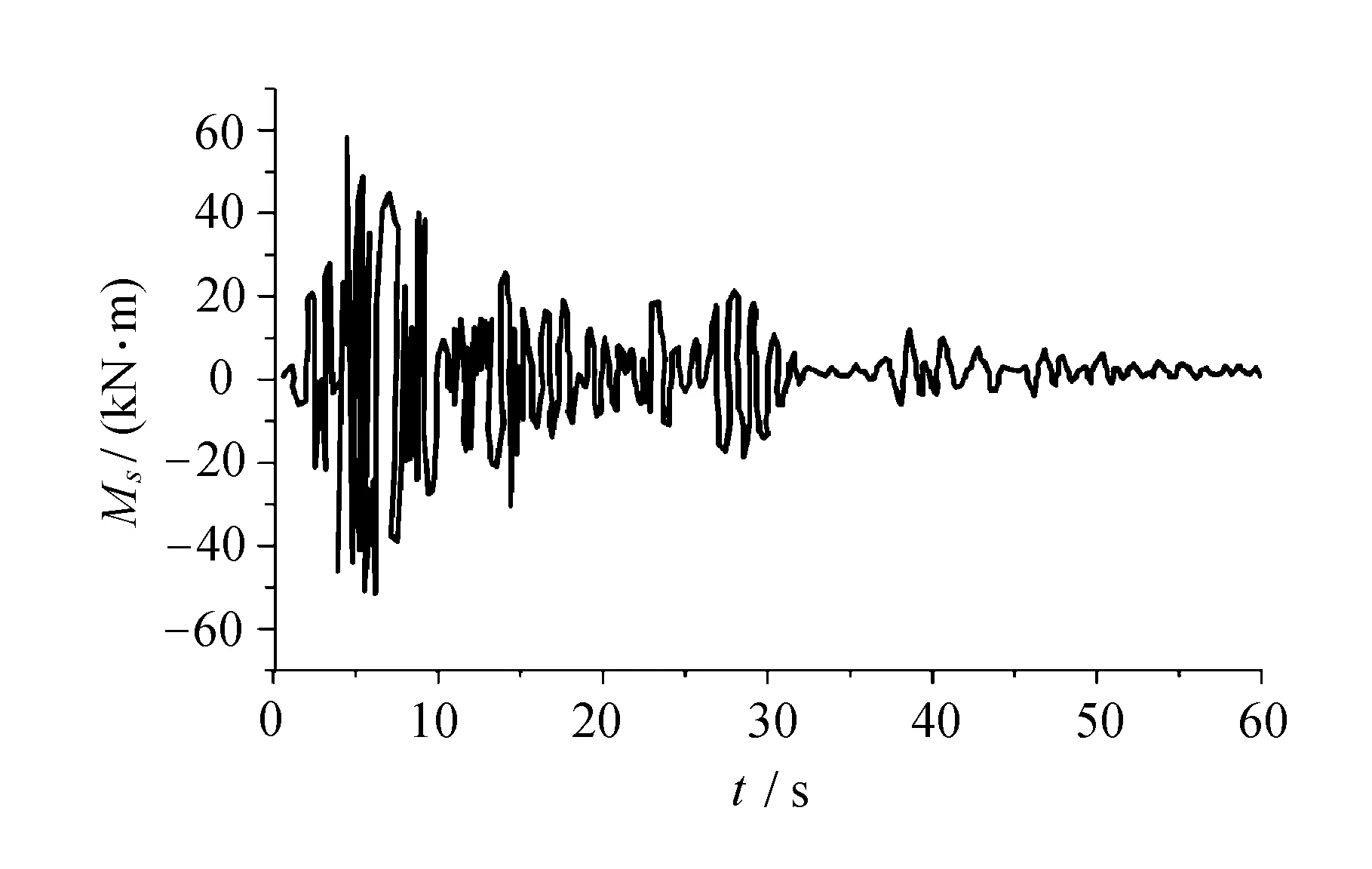
液罐車側(cè)向受力不僅受充液比的影響,而且還受側(cè)向加速度的影響。在此選取充液比λ=1,以埃爾森特羅EI地震波為激勵,計算液罐車受到的慣性力矩、晃動力矩和合力矩。側(cè)向加速度激勵如圖3所示。

圖3 側(cè)向加速度激勵圖
液罐車所受到的慣性力矩、晃動力矩和合力矩如圖4所示。
從圖4中可知,在λ=1條件下,慣性力矩與晃動力矩的幅值相同時,罐體受到劇烈的晃動,此時罐體極易表現(xiàn)出側(cè)向不穩(wěn)定,有側(cè)翻的危險。

(a) 慣性力矩
(b) 晃動力矩

(c) 合力矩
但由于慣性力矩和晃動力矩的相位不同,即兩者之間的相互作用并不是代數(shù)相加,它在實際運動中與很多因素相關(guān)。因此,在實際的運動過程中應(yīng)盡量避免在此類工況下行駛。
3 液體晃動對車輛運動狀態(tài)的影響
由于液罐車質(zhì)量和體積較大,若進(jìn)行實車實驗危險過大。在此應(yīng)用仿真方法分析液體晃動對液罐車穩(wěn)定性的影響。對比相同的工況下,罐內(nèi)等質(zhì)量的固體與液體的運動分別對液罐車穩(wěn)定性的影響。液體晃動對罐車穩(wěn)定性影響流程如圖5所示。

圖5 液體晃動對罐車穩(wěn)定性影響流程圖
仿真液罐車的幾個重要參數(shù):
1)充液比λ=1;
2)車速v=40 km/h;
3)角階躍輸入方向盤轉(zhuǎn)角如圖6所示。

圖6 角階躍輸入方向盤轉(zhuǎn)角
分別對一定質(zhì)量的液體和等效質(zhì)量的固體進(jìn)行仿真,可得到穩(wěn)定性仿真曲線如圖7所示。
圖7表明,在角階躍輸入下,與等效質(zhì)量的固體相比,液體對液罐車穩(wěn)定性的影響最大。這是因為液體的晃動增加了整體受力的不均勻,使得整車動力穩(wěn)定性變差。

(a) 側(cè)傾角

(b) 橫擺角速度
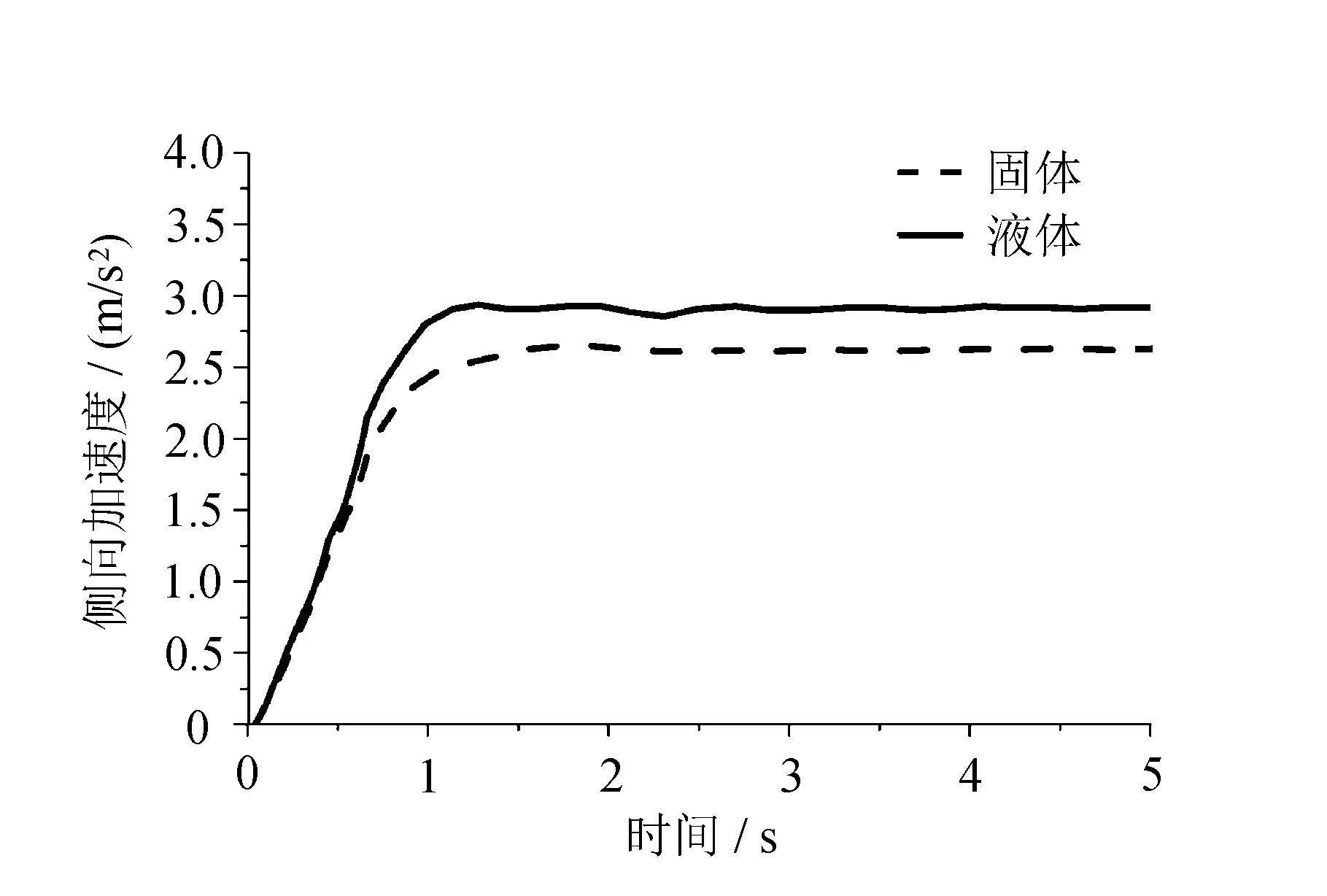
(c) 側(cè)向加速度
4 半掛液罐車動力學(xué)模型
考慮整車的側(cè)向、橫擺運動及側(cè)傾運動,采用三自由度車輛簡化模型,如圖8所示。

(a) 橫擺
牽引車運動方程
(12)

(13)

(14)
半掛車運動方程
(15)

(16)

(17)
兩剛體運動約束方程
(18)
文中采用線性輪胎模型,則有:
(19)
式中:m1,m2----分別為牽引車、半掛車質(zhì)量;
β1,β2----分別為牽引車、半掛車的質(zhì)心側(cè)偏角;
ψ1,ψ2----分別為牽引車、半掛車的質(zhì)心橫擺角;
m1s,m2s----分別為牽引車和半掛車的簧載質(zhì)量;
Fi----第i輪的側(cè)向力;
F4----半掛車對牽引車的作用力;
Φ1,Φ2----分別為牽引車、半掛車簧載質(zhì)量側(cè)傾角;
I1xx,I2xx----分別為牽引車、半掛車簧載質(zhì)量側(cè)傾轉(zhuǎn)動慣量;
I1zz,I2zz----分別為牽引車、半掛車橫擺轉(zhuǎn)動慣量;
u1,u2----分別為牽引車、半掛車行駛車速;
kr1,kr2----分別為牽引車、半掛車側(cè)傾剛度;
c1,c2----分別為牽引車、半掛車側(cè)傾角阻尼;
k12----第五輪側(cè)傾剛度;
h1c,h2c----分別為牽引車、半掛車質(zhì)心高度;
h1,h2----分別為牽引車、半掛車質(zhì)心到各自側(cè)傾軸線的距離;
Γ----鉸接角;
a,b,c----分別為牽引車重心到前軸、后軸、鉸接點的距離;
d,e----分別為半掛車重心到后軸、前軸的距離。
5 集成模型預(yù)測控制器設(shè)計
實際的期望質(zhì)心側(cè)偏角和橫擺角速度可以作為模型預(yù)測控制器的輸入,該控制器的輸出為附加的橫擺力矩和前輪轉(zhuǎn)角。
為了獲得側(cè)向穩(wěn)定性,實際的橫擺角速度應(yīng)接近期望的橫擺角速度。文中設(shè)計了三自由度整車模型。整車模型狀態(tài)空間方程如下:
(20)

則有:
實際中為保證側(cè)向和側(cè)傾的穩(wěn)定性,橫擺角速度和質(zhì)心側(cè)偏角都應(yīng)當(dāng)被限制在穩(wěn)定閾值內(nèi)。期望的橫擺角速度可通過穩(wěn)定參考模型得到:
(21)
式中:
此外,期望的橫擺角速度應(yīng)受到路面附著系數(shù)的約束:
(22)
穩(wěn)態(tài)轉(zhuǎn)向時,文中假設(shè)牽引車與掛車期望的橫擺角速度相同,即
ψ1ref=ψ2ref
為了阻止轉(zhuǎn)向過程中整車的側(cè)傾,期望的質(zhì)心側(cè)偏角可選為零,即
β1ref=β2ref=0
整車狀態(tài)空間模型離散化得到如下簡約模型:
x(k+1)=F(x(k),u(k))
y(k)=Gx(k)
(23)
在k時刻的車輛狀態(tài),依據(jù)上述公式可以預(yù)測接下來Np步的動力學(xué)狀態(tài),表述如下:
x(k+Np)=F(x(k),u(k),u(k+1),…,
u(k+Nu),…,u(k+Np-1))
式中:Nu----控制時域;
Np----預(yù)測時域。
由文獻(xiàn)[13]可知,前輪主動轉(zhuǎn)向電機(jī)的控制周期為10~30 ms,沒有ABS的液壓制動系統(tǒng)的移動周期為20~50 ms,考慮到采樣周期應(yīng)同時滿足上述兩個條件,即文中采用的采樣時間Ts=20 ms,當(dāng)采樣時間超過控制時域,假設(shè)控制輸入到預(yù)測時域之間保持不變,即為:
u(k+Nu-1)=u(k+Nu)=
u(k+Nu+1)=
…=
u(k+Np-1)
在k時刻的最優(yōu)控制序列U(k)和響應(yīng)的預(yù)測輸出為:
其中,y(k+i|k),i=1,2,…,Np,可由式(23)得出。
考慮到控制的要求為實際橫擺角速度與期望橫擺角速度相匹配。期望橫擺角速度公式如下:

控制罐車穩(wěn)定性所需要的額外橫擺力矩是由執(zhí)行器(制動器的差動制動)而來,為了防止罐車側(cè)翻,該額外橫擺力矩應(yīng)有如下約束:
(24)
此外由于汽車結(jié)構(gòu)的限制,罐車的前輪轉(zhuǎn)向角度也有一定的約束范圍:
δmin≤δ(k)≤δmax
(25)
當(dāng)罐車進(jìn)入彎道或變道時,其實際橫擺角速度應(yīng)很快與期望的橫擺角速度匹配,于是使目標(biāo)函數(shù)J1=‖(Y(k+1|k)-R(k+1))‖2值最小。此外,為了使輸入平穩(wěn)順滑,目標(biāo)函數(shù)J2=‖U(k)‖2值也應(yīng)最小。于是聯(lián)立J1,J2就可得到整車控制的目標(biāo)函數(shù):
J(Y(k),U(k),Nu,Np)=‖Qy(Y(k+1|k)-R(k+1))‖2+‖QuU(k)‖2
(26)
式中:Qy,Qu----權(quán)重矩陣。
為了得到上述目標(biāo)函數(shù)的最優(yōu)解,就要基于約束條件式(24)、式(25)求解。
當(dāng)?shù)玫阶顑?yōu)控制序列U(k),選取k時刻最優(yōu)控制序列中的第一個值作為k+1時刻的輸入。然后整個預(yù)測時域向前移動一個間隔,在重復(fù)滾動優(yōu)化得到此后的最優(yōu)控制值。模型控制框圖如圖9所示。

圖9 液罐車穩(wěn)定性控制框圖
6 仿真結(jié)果分析
為了驗證控制策略的有效性,選擇極限條件下的魚鉤工況進(jìn)行仿真,在該工況下,液罐車的失穩(wěn)基本表現(xiàn)為側(cè)翻事故。針對液體晃動降低液罐車行駛穩(wěn)定性,以三自由度半掛液罐車為參考模型,采用模型預(yù)測控制計算出最優(yōu)的附加橫擺力矩,制定差動制動的控制方案來分配附加橫擺力矩,經(jīng)仿真分析對比得出液罐車側(cè)傾角、橫擺角速度、側(cè)向加速度曲線如圖10所示。

(a) 方向盤角輸入

(b) 側(cè)傾角

(c) 橫擺角速度

(d) 側(cè)向加速度
由圖(10)可以看出,未施加控制的半掛液罐車側(cè)傾角會出現(xiàn)急劇的變化,側(cè)向加速度超過重型車輛的側(cè)翻閾值0.4 g,施加控制的液罐車側(cè)向加速度穩(wěn)定在0.3 g內(nèi),未施加控制的液罐車比有控制的側(cè)向加速和橫擺角速度跳動的幅度范圍更大。在7.5 s時未施加控制的液罐車側(cè)傾角發(fā)散,此時車輛已經(jīng)發(fā)生側(cè)翻,而施加控制后液罐車側(cè)傾角收斂,始終在穩(wěn)定閾值內(nèi)。
7 結(jié) 語
1)根據(jù)勢流理論建立了液罐車罐體內(nèi)液體的運動方程,分析了液體晃動特性和影響因素。在λ=1時,液體晃動最劇烈。
2)為研究液體晃動對液罐車穩(wěn)定性的影響,在角階躍輸入下進(jìn)行裝載固液貨物對比仿真試驗,試驗表明,與裝載固體貨物相比,液罐車的側(cè)傾角和橫擺角出現(xiàn)較大的變化,液體的晃動對整車穩(wěn)定性影響較大。
3)在極限工況下仿真分析結(jié)果表明,設(shè)計的模型預(yù)測控制策略能夠有效地提高車輛行駛穩(wěn)定性。
參考文獻(xiàn):
[1] Welt F, Modi V J. Vibration damping through liquid sloshing, Part Ⅰ: A nonlinear analysis[J]. ASME Transactions, Journal of Vibration and Acoustics,1992,114(1):10-16.
[2] Chen C, Tomizuka M. Lateral control of commercial heavy vehicle[J]. International Journal of Vehicle Mechanics and Mobility,2000,33(6):391-420.
[3] Yan G R, Subhash Rakheja, Siddiqui K. Analysis of transient fluid slosh in partly-filled tanks with and without baffles: Part 1:Model validation[J]. International Journal of Heavy Vehicle Systems. 2010,17(3):359 -379.
[4] Iman Hazrati Ashtiani, Mehrnoosh Abedi. Effects of Liquid Cargo on Lateral Stability of B-Train Combination[C]//SAE Technical Paper,2014-01-2319.
[5] 岳寶增,祝樂梅,于丹.儲液罐動力學(xué)與控制研究進(jìn)展[J].力學(xué)進(jìn)展,2011,41(1):79-91.
[6] 趙樹恩,趙靈鶴.汽車罐車橫向運動液體晃動動力學(xué)特性模擬[J].應(yīng)用數(shù)學(xué)和力學(xué),2014,35(11):1259-1270.
[7] Avesta Goodarzi. Integrated Yaw and Roll Moments Control of Articulated Vehicles[C]//SAE Paper,2009-01-2874.
[8] Ji Y, Guo H Y, Chen H, et al. Integrated control of active front steering and direct yaw moment based on model predictive control[C]//6th chin. Control Decis. Conf. Changsha, China,2014,34(2):2044-2049.
[9] Jianbo Lu, David Messih. An enhancement to an electronic stability control system to include a rollovercontrol function[C]//SAE Paper,2007-01-0809.
[10] 于志新,宗長富.基于LQR的重型半掛汽車列車穩(wěn)定性控制策略[J].中國公路學(xué)報,2011,24(2):114-119.
[11] 趙偉強(qiáng),封冉,宗長富.基于等效晃動模型的液罐車防側(cè)翻控制策略[J].吉林大學(xué)學(xué)報:工學(xué)版,2018,48(1):30-35.
[12] 盧軍.任意充液比油罐車液體晃動及整車橫向穩(wěn)定性研究[D].成都:西南交通大學(xué),2009.
[13] Bing Zhu, Qi Piao, Jian Zhao, et al. Integrated chassis control for vehicle rollover prevention with neural network time-to-rollover warning metrics[J]. Advances in Mechanical Engineering,2016,8(2):1-13.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
