收包率自適應功率控制方法
2018-06-29 00:34:10胡黃水
長春工業大學學報 2018年3期
鄭 曼, 胡黃水*, 趙 航, 王 博
(1.長春工業大學 計算機科學與工程學院, 吉林 長春 130012;2.長春客車股份有限公司, 吉林 長春 130012)
0 引 言
無線傳感器網絡(Wireless Sensor Networks, WSNs)作為信息物理系統和物聯網感知層支撐技術[1-2],由大量資源受限的節點構成,且廣泛應用于環境監測、軍事偵察、醫療健康和科學勘探等領域[3-5]。由于節點能量受限,如何延長網絡生命周期依然是無線傳感器網絡面臨的主要問題。而大量研究已經表明,功率控制是減少WSNs能耗和保持通信可靠的有效方法之一[6]。傳輸功率對鏈路質量產生顯著影響[4,7],因此可采用鏈路級功率控制方法來延長無線傳感器網絡生命周期,同時提升網絡性能[3,7]。如文獻[6-8]采用基于接收節點鏈路質量指示值(Link Quality Indicator, LQI)來調節發送節點發射功率,文獻[9]采用接收信號強度指示值(Received Signal Strength Indication, RSSI)來調整節點發送功率。這些方法在保證鏈路質量的同時,在一定程度上降低了網絡能耗。但實際無線環境中,LQI、RSSI變化無規律且頻繁,將導致功率的不斷調節,從而降低網絡性能。而收包率(Packet Reception Rate, PRR)相較LQI、RSSI而言,更能直接體現鏈路質量[1,3,10-12]。鏈路質量參數容易受到一些不確定性因素影響,如環境、動物干擾等,而模糊邏輯系統可以處理這些意外干擾和不確定性因素[13-15]。因此,文獻[12]提出基于模糊控制器的無線傳感器網絡功率控制算法(Neural Fuzzy Controller Based Transmission Power Control Algorithm for Wireless Sensor Networks, FCTP),該方法通過閉環回路控制鄰居數量來對節點的傳輸功率進行調節,但每個節點的期望節點度不能隨網絡動態變化,很容易導致某些節點過早死亡,從而減小網絡生命周期。文獻[16]提出自適應傳輸功率算法(Adaptive Transmission Power Control, ATPC),基于研究鏈路質量調節發射功率,但該算法在調節的過程中沒有考慮節點的剩余能量,因此不能很好地延長網絡生命周期、降低節點平均能耗。文獻[14]提出了自適應模糊控制算法(Self-adaptive Fuzzy Controller Based Power Control, SAFPC),該算法采用模糊閉環反饋系統,根據剩余能量來自適應動態調節期望節點度,從而控制節點發射功率達到目標節點度。該方法能有效克服FCTP的缺點,但依然通過構建隸屬度函數和if-then規則來設計模糊邏輯控制器,其對復雜且動態的實際無線傳感器來說很難獲得期望的性能。
針對現有方法存在的問題,文中提出一種基于自學習NFTC方法,其根據節點的剩余能量自適應調整節點目標收包率,并基于該收包率控制節點的傳輸功率。具體為采用包含兩個模糊推理系統FIS的神經模糊控制器,FIS1采用神經網絡學習來替代繁雜的模糊控制器參數調整過程,調節每個節點的傳輸功率,使節點的實際收包率達到目標值。FIS2采用“輸入-輸出-反饋”機制,根據節點剩余能量調整其目標收包率,從而自適應地依據節點剩余能量調節傳輸功率,均衡網絡能量消耗,降低網絡收斂時間及延長網絡生命周期。
1 NFTC算法設計
NFTC的神經模糊控制器用于根據節點的剩余能量自適應調整其目標收包率,并基于該目標收包率控制節點的傳輸功率,其由兩個模糊推理系統FIS1和FIS2構成,如圖1所示。

圖1 NFTC的結構
模糊控制以模糊理論為主要計算方法[13],可以實現復雜的非線性映射,人工神經網絡能夠通過已知的數據進行學習和歸納,兩者的結合使控制系統既具有模糊邏輯推理能力,同時也可以通過系統自適應來不斷改進和調整,從而達到更好的控制效果。
1.1 系統輸入與輸出

在功率Ptx下,節點i和j之間傳輸一個φ字節的數據包,接收數據包的成功率由式(1)給出:
(1)
式中:dij----發射端與接收端之間的距離;
d0----參考距離;
P0----參考距離的路徑損耗;
n----路徑損耗指數;
Xσ----準偏差為σ的零均值高斯隨機變量。
本底噪聲通常是-145 dB(Mica motes節點[3,8]溫度為300 K)。正如文獻[3,8]所述,Mica motes節點提供的參數值為n=4,σ=4,d0=1 m,P0=55 dB。對于能量模型,采用文獻[16]中描述的一階無線電模型計算剩余能量偏差的方法。對于節點對i,j在線性通信發射狀態下發射l字節數據包的能量消耗和接收狀態下接收m字節數據包的能量消耗由式(2)給出:
(2)
式中:EI----發射前的剩余能量;
Ee----相應電子電路所消耗的能量;
Er----功率放大器所消耗的能量。
正如文獻[16]所述,參數Ee、Er都假定為50 nJ/bit。
1.2 第一推理引擎
模糊推理系統由兩個推理引擎組成。第一推理引擎FIS1主要包括一個模糊神經控制器,結構如圖2所示。

圖2 第一推理引擎結構
第一推理引擎FIS1的五層結構分別描述如下:
(3)
式中:i----模糊子集的個數;

3)規則層:該層用于進行模糊運算。輸出為各神經元輸入取積后的歸一化值,即對各個規則的激勵強度歸一化。每個節點輸出由式(4)給出:
(4)
4)自適應計算層:該層結合四個控制規則完成自適應操作,并計算出每個規則所決定的輸出。這一層的輸出由式(5)給出:
(5)
式中:{pi,qi,ri}----該節點的結論參數。
Ptx=P1+P2+P3+P4
(6)
根據式(3)~式(5),整理式(6),該網絡的輸出值Ptx如下:

(7)
1.3 第二推理引擎
1.3.1 模糊化

圖隸屬度函數

圖隸屬度函數
輸出變量ΔPRR的模糊語言變量為‘D2S’, ‘D1S’, ‘HOLD’, ‘U1S’, ‘U2S’,其對應的五個清晰值分別為-2,-1, 0, 1, 2。‘D2S’, ‘U2S’為梯形隸屬度函數,‘D1S’, ‘HOLD’, ‘U1S’,‘ D1S’為三角形隸屬度函數。ΔPRR的隸屬度函數如圖5所示。

圖5 ΔPRR隸屬度函數
1.3.2 模糊規則和去模糊化
輸入變量的清晰值在通過模糊化后得到相應的語言變量,然后經過模糊邏輯系統中的if-then規則庫,對輸入變量進行控制。該方法更加簡潔,控制效果更好[3]。FIS2推理引擎的if-then模糊規則見表1。

表1 NFTC模糊規則
系統采用中心法進行去模擬化,輸出值ΔPRR清晰。具體去模糊化過程如下:
(8)
2 仿真結果
為了驗證NFTC性能,文中使用Matlab進行仿真測試,并與ATPC[16]、SAFPC[14]進行比較。設定節點隨機部署在100 m×100 m的方形區域中,基站坐標為(50,50),每個節點的初始能量為1 J,仿真次數為50次,結果取平均值。首先研究網絡節點數量不同時節點平均能耗對比,然后比較不同初始發射功率時的網絡收斂時間及不同節點數目時的網絡生命周期。
以50個節點數目為間隔,在8個不同節點數目下,得到節點的平均能耗,節點平均能耗對比如圖6所示。

圖6 節點數量不同時平均能耗對比
從圖6中可以得知,與SAFPC和ATPC算法相比,NFTC算法平均能耗隨節點數量增加上升緩慢。
在不同初始發射功率下的網絡收斂時間,初始發射功率以5 dBm為梯級,在-20 dBm到5 dBm范圍內的6個不同傳輸功率下,得到相應的網絡收斂時間。兩種算法的仿真實驗結果比較如圖7所示。
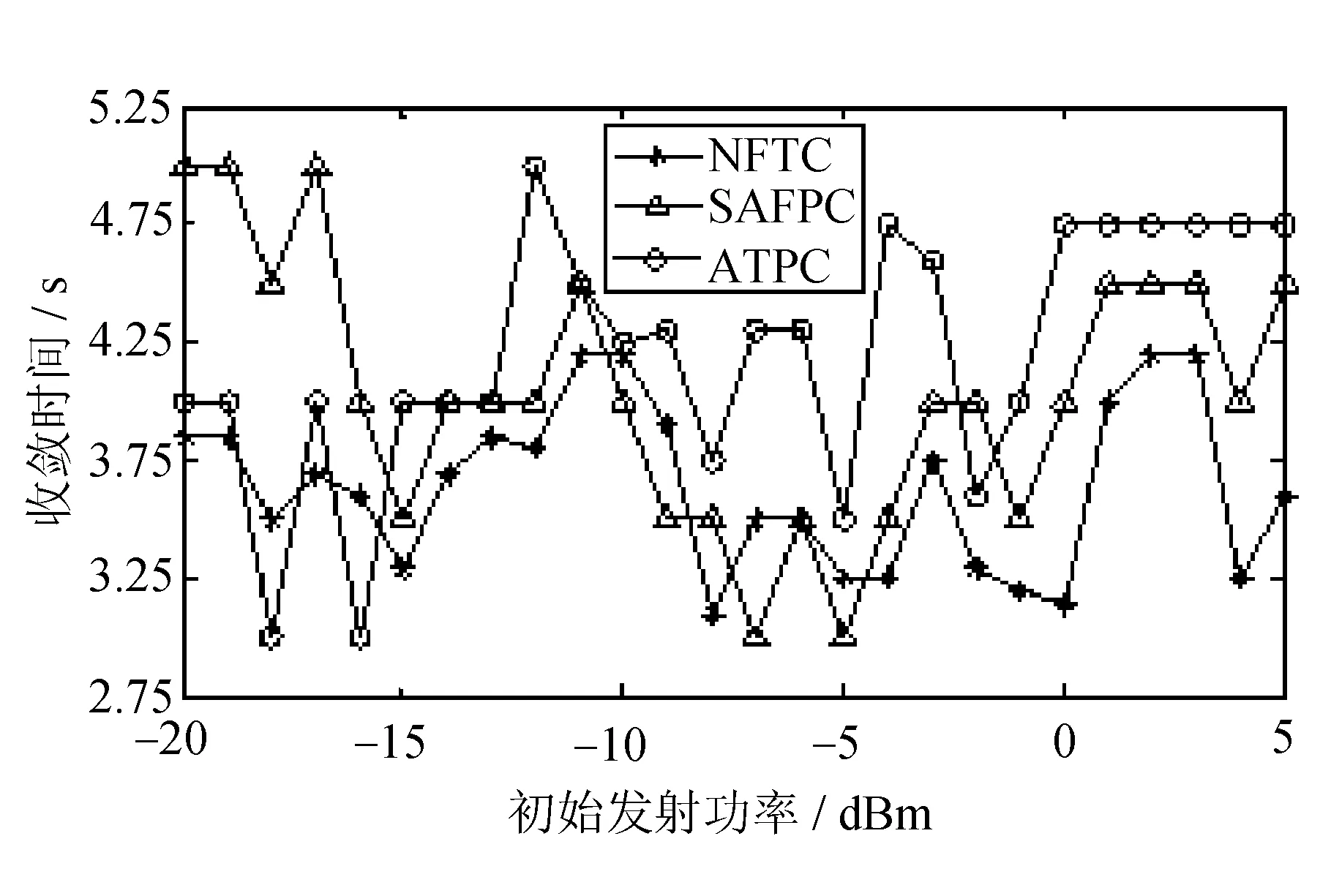
圖7 不同初始發射功率時的收斂時間
NFTC算法與SAFPC和ATPC算法相比,網絡收斂時間普遍降低,收斂速度更快,具有更好的網絡性能。
由于NFTC算法考慮節點能耗的同時,調整了傳輸功率,比較兩種算法不同節點數目下的網絡生命周期如圖8所示。
由仿真結果可知,NFTC算法比SAFPC和ATPC算法的網絡生存時間更長。因此,NFTC算法可更好地延長網絡壽命。

圖8 不同節點數目時的網絡生命周期
3 結 語
從控制節點傳輸功率的角度出發,提出了一種面向無線傳感器網絡的自學習模糊神經功率控制算法NFTC,其在人工神經網絡學習訓練集的基礎上建立模糊控制系統,避免傳統方法的復雜參數調節過程,并通過反饋、循環機制調整節點傳輸功率,以獲得期望的節點能量消耗。從收斂時間、平均能耗以及生命周期方面對算法進行了仿真分析,結果表明,相比ATPC和SAFPC算法,NFTC算法性能較優,能有效控制節點能耗,延長網絡生命周期。
參考文獻:
[1] Guo Z Q, Wang Q, Li M H, et al. Fuzzy logic based multidimensional link quality estimation for multi-hop wireless sensor networks[J]. IEEE Sensors Journal,2013,13(10):3605-3615.
[2] Vicente H D, Jose F M, Nestor L M, et al. Self-adaptive strategy based on fuzzy control systems for improving performance in wireless sensors networks[J]. ACM Transaction on Sensor Networks,2015,15(9):24125-24142.
[3] Shan L, Fei M, Jingbing Z, et al. ATPC: adaptive transmission power control for wireless sensor networks[J]. Sensors,2016,12(1):1-6,31.
[4] 王福豹,史龍,任豐原.無線傳感器網絡中的自身定位系統和算法[J].軟件學報,2005,16(5):857-868.
[5] 沈瑋娜,胡黃水,王宏志,等.自適應模糊無線傳感器網絡路由選擇[J].長春工業大學學報,2017,38(2):144-149.
[6] 吳鵬杰.一種新穎的無線傳感器節點模糊功率控制算法[D].北京:北京郵電大學,2010:22-29.
[7] 邵奇可,馮淑娜,毛科技.面向WN的自適應模糊功率控制算法研究[J].傳感技術學報,2015,28(4):563-571.
[8] Huseyin U Y, Bulent T. Transmission power control for link-level handshaking in wireless sensor networks[J]. IEEE Sensors Journal,2016,16(2):561-576.
[9] 陳煥,汪正祥,傅忠云.基于發射功率自適應調節的無線通信網抗擾研究[J].電子科技,2016,29(1):71-74.
[10] 李成法,陳貴海,葉懋,等.一種基于非均勻分簇的無線傳感器網絡路由協議[J].計算機學報,2007,30(1):27-36.
[11] 袁正午,梁均軍.累積鏈路質量無線傳感器網絡路由算法研究[J].計算機工程與應用,2011,47(14):66-69.
[12] 王騏,王殊,孟中樓.無線傳感器網絡中一種基于接收功率異常的入侵檢測算法[J].計算機科學,2009,36(3):34-37.
[13] Zhang J, Chen J, Sun Y. Transmission power adjustment of wireless sensor networks using fuzzy control[J]. Wireless Communication & Mobile Computing,2009,9(6):805-818.
[14] 胡黃水,沈瑋娜,王出航,等.基于自適應模糊控制器的無線傳感器網絡功率控制[J].計算機應用,2017,37(9):2470-2473,2562.
[15] Geeta D D, Nalini N, Rajashekhar C B. Fault tolerance in wireless sensor network using hand-off and dynamic power adjustment approach[J]. Journal of Network and Computer Applications,2013,36(4):1174-1185.
[16] Pappas G J. ATPC: Adaptive transmission power control for wireless sensor networks[J]. Acm Transactions on Sensor Networks,2016,12(1):6.
