一種永磁同步電機位置控制策略
2018-08-18 08:23:26鄭歡歡
數字技術與應用
2018年4期
關鍵詞:永磁同步電機
鄭歡歡

摘要:針對基于滑模變結構位置控制的永磁同步電機伺服系統帶來定位偏差現象,提出一種利用模糊遞歸神經網絡估計伺服系統參數上界的控制方法,該方法能夠減小系統定位偏差。仿真表明,該控制策策略有效提高定位精度。
關鍵詞:永磁同步電機;模糊遞歸神經網絡;滑模變結構;伺服系統
中圖分類號:TM46 文獻標識碼:A 文章編號:1007-9416(2018)04-0005-03
永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)具有氣隙磁密高、轉矩慣量比大、響應速度快等優點,廣泛應用于高精度的中小容量交流伺服系統[1]。由于PMSM是一個非線性、多變量系統,常規控制器容易受電機參數變化和外部負載擾動等不確定性因素的影響,無法很好地兼顧動態性能和抗擾性能[2-5]。目前已有的基于線性模式的消除不確定因素方法,魯棒性難以得到保證[2]。針對限制滑模控制器應用的系統不確定性(包括參數不確定性和外部擾動)的上界參數的估計,如果通過準確地估計系統參數和外部擾動不確定性上界,系統的偏差題能夠很好地抑制。
本文提出一種基于神經網絡的自適應滑模變結構控制策略,該控制方法通過對模糊遞歸神經網絡對系統不確定性參數的上界的快速估計,從而減小了定位的偏差,并提高了系統動態響應速度。
1 永磁同步電機數學模型
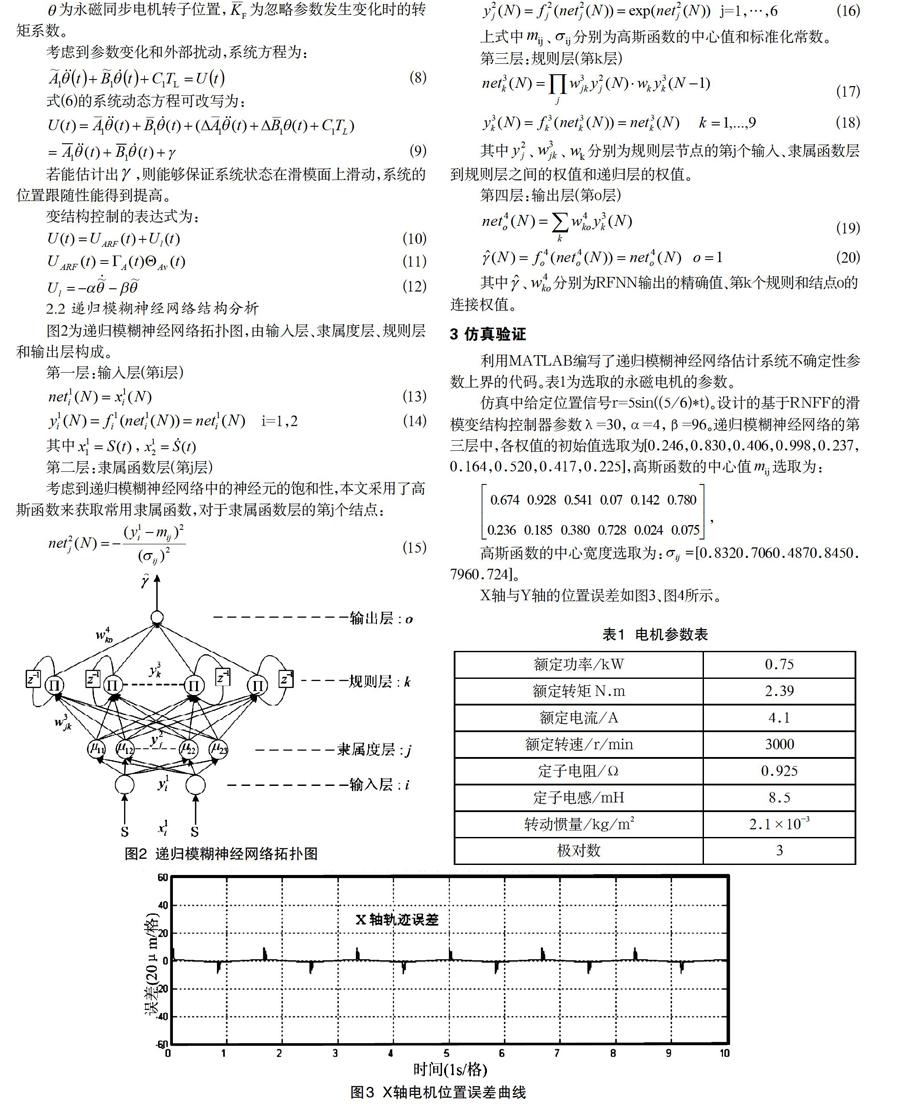
X軸與Y軸的位置誤差如圖3、圖4所示。
從圖3,圖4可見,應用基于遞歸模糊神經網絡的變結構控制器在穩態時位置誤差幾乎為零,而在反向時最大有10μm以內的誤差。……
登錄APP查看全文
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
