機器人手術與傳統腹腔鏡手術治療子宮內膜癌效果的Meta分析
2018-10-15 07:23:36陳勇王夙斐
長江大學學報(自科版) 2018年16期
陳勇,王夙斐
(長江大學醫學院, 湖北 荊州 434000)
易村犍
(長江大學臨床醫學院 荊州市第一人民醫院婦產科, 湖北 荊州 434000)
子宮內膜癌是女性生殖道一種常見的惡性腫瘤[1],占女性生殖道惡性腫瘤的20% ~ 30%。目前該病在美國已位居婦科惡性腫瘤的首位[2]。子宮內膜癌好發于老年女性,平均發病年齡為62歲。其中有67%的患者腫瘤局限于子宮中腫瘤原發部位,其五年生存率為95.3%;有9%的腫瘤發生遠處轉移,其五年生存率為16.2%[3]。采取手術切除的方式是治療子宮內膜癌的主要措施。傳統的開腹手術與傳統腹腔鏡手術(CLS)或機器人輔助腹腔鏡手術(RAS)相比,對患者傷害大,并發癥多,且恢復慢[4]。1992年Childers等[5]首次報道了CLS在子宮內膜癌的應用。CLS具有微創、并發癥少、患者恢復快等優勢快速。然而CLS存在著學習時間長、手術器械觸覺差、二維畫面、手術視野晃動、術者手顫動等缺點,有時達不到高精準度的手術要求。隨著科學技術的發展,2000年達芬奇手術系統通過了美國食品和藥品監督局(FDA)的認可,RAS逐漸在婦科手術領域開展起來。RAS除了具有CLS的優點外,還具有三維立體視野、畫面穩定、高仿真機器人手臂、操作環境自由等特點。近幾年,RAS在子宮內膜癌的治療中迅速發展。許多研究也對RAS與CLS在治療子宮內膜癌的安全性和有效性進行了比較,但是大多數研究樣本量較小,研究結果缺少說服力。本文將通過Meta分析綜合比較RAS與CLS在治療子宮內膜癌的圍手術期治療效果,從而指導臨床的治療,并為后續研究提供依據。
1 資料和方法
1.1 納入與排除標準
納入標準:①隨機對照試驗或非隨機對照試驗。②已發表的RAS與CLS治療子宮內膜癌手術對比研究的英文文獻。③評估數據包括:手術時間、術中失血量、術后住院時間、輸血人數、術中術式轉換率、并發癥發生率、淋巴結清掃數目和手術花費中的至少一項。④對同一作者或機構發表的文獻,選取其更高質量的文獻進行統計。排除標準:①信、會議、綜述、個案報道的文獻。②未涉及RAS與CLS在子宮內膜癌治療效果對比的文獻。③無法提取數據或者無法獲得全文的文獻。④同一作者或機構重復發表的文獻。
1.2 檢索策略
計算機檢索:PubMed, Web of science, Cochrane Library Databases and EMbase英文數據庫,檢索時限均從建庫到2017年4月止。檢索詞為“robotic-assisted”,“robotic”,“laparoscopy”,“endometrial cancer”,“endometrial carcinoma”。同時人工檢索相關文獻中的參考文獻,以免發生遺漏。
1.3 文獻篩選及數據提取
按照所制定的納入和排除標準,對檢索獲得的文獻由2名研究員(陳勇,王夙斐)獨立的進行篩選。先閱讀文獻的題目和摘要,若符合要求則進一步閱讀全文,判斷是否能納入最終的選擇。然后兩人交流選擇結果,提取納入文獻的信息包括,①基本信息:第一作者、發表時間、研究地區、病例數、年齡、BMI和病理分期。②分析指標:手術時間、術中失血量、術后住院時間、輸血人數、術中術式更換率、并發癥發生率、盆腔淋巴結清掃數目、腹主動脈旁淋巴結清掃數目、總淋巴結清掃數目和手術花費。若存在分歧,則雙方討論解決;若仍不能解決則征求第三方(易村犍)意見。
1.4 文獻質量評價
在納入的所有文獻中,若研究方法是回顧性研究,則采用NOS評價量表[6]進行文獻質量評價;若是隨機對照試驗,則采用改良后的Jadad量表[7]進行文獻質量評價。
1.5 統計分析
本文采用Review Manager 5.3軟件進行Meta分析。對二分類變量分析計算比值比(OR),對度量單位一致的連續性變量分析計算加權均數差值(WMD),對度量單位不一致的連續性變量分析計算標準化均數差值(SMD),各結果采用95%可信區間(CI)進行統計,P<0.05表示分析結果有統計學意義。用I2值表示各數據之間的異質性。當I2≤50%,表示各數據間無明顯異質性,則采用固定效應模式;當I2>50%,表示各數據間存在異質性,則采用隨機效應模式。用漏斗圖檢測納入文獻是否存在發表偏倚。
2 結果
2.1 文獻篩選結果
通過數據庫檢索相關文獻總共1013篇,按照納入和排除標準,經過篩選后最終納入24篇文獻。
2.2 文獻質量評價結果
共納入24篇[4, 8~30]文獻,涉及3545例患者,其中行機器人輔助手術1524例,行傳統腹腔鏡手術2021例。有23篇文獻為回顧性研究,1篇文獻為隨機對照研究。根據NOS評價量表標準,7篇文獻為9顆星,8篇文獻為8顆星,7篇文獻為7顆星,1篇文獻為4顆星;根據改良Jadad量表標準,1篇文獻為3分,納入的文獻總體質量較好。所納入文獻的基本情況和質量評價結果詳見表1。
2.3 文獻Meta分析結果
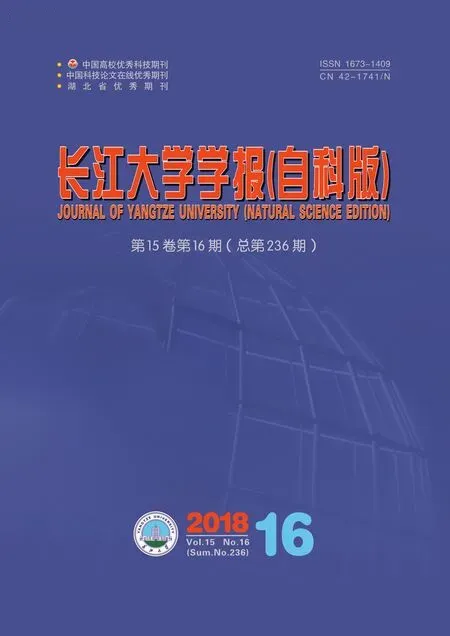
1) 手術時間 總共有21篇文獻報道了手術時間。因I2=99%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS兩組比較手術時間差異無統計學意義(WMD=-10.00,95%CI=-27.77~7.76,P=0.27),詳見圖1。
表1納入文獻的基本特征和質量評價

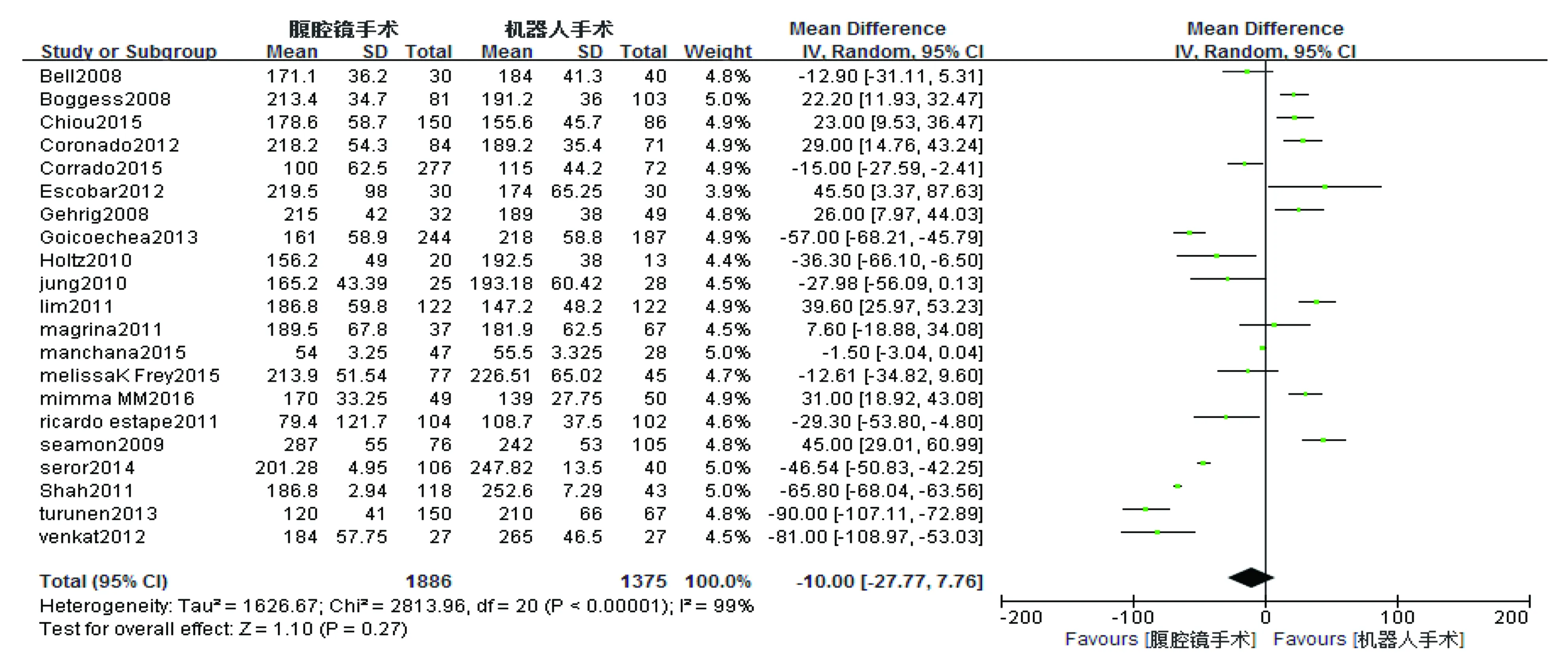
圖1 RAS與CLS手術時間對比圖
2)術中失血量 總共有19篇文獻報道了因手術導致的失血量。因I2=89%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS比較手術中失血量差異有統計學意義,且RAS比CLS術中失血量明顯減少(WMD=66.51,95%CI=42.85~90.17,P<0.00001),詳見圖2。
3)術后住院時間 總共有18篇文獻報道了術后住院時間。因I2=80%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS比較住院時間差異有統計學意義,且RAS比CLS術后住院時間明顯減少(WMD=0.37,95%CI=0.21~0.54,P<0.00001),詳見圖3。
4) 術中輸血人數 總共有14篇文獻報道了術中需要輸血的人數。因I2=44%,采用固定效應模型分析。Meta分析結果顯示,RAS與CLS比較術中輸血人數差異無統計學意義(OR=1.11,95%CI=0.73~1.68,P=0.62),詳見圖4。
5) 手術花費 總共有3篇文獻報道了手術花費。因I2=75%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS比較手術花費差異有統計學意義,且RAS比CLS手術花費明顯增加(SMD=-0.63,95%CI=-1.20~-0.06,P=0.03),詳見圖5。

圖2 RAS與CLS術中失血量比較圖
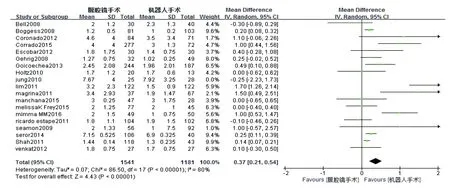
圖3 RAS與CLS術后住院時間比較圖
圖4 RAS與CLS術中輸血人數比較圖

圖5 RAS與CLS手術花費比較圖
6)術中術式更換率 總共有15篇文獻報道了術中術式更換率。因I2=0%,采用固定效應模型分析。Meta分析結果顯示,RAS與CLS比較術中術式更換率差異有統計學意義,且RAS比CLS術中術式更換率明顯減少(OR=2.87,95%CI=1.85~4.45,P<0.00001),詳見圖6。
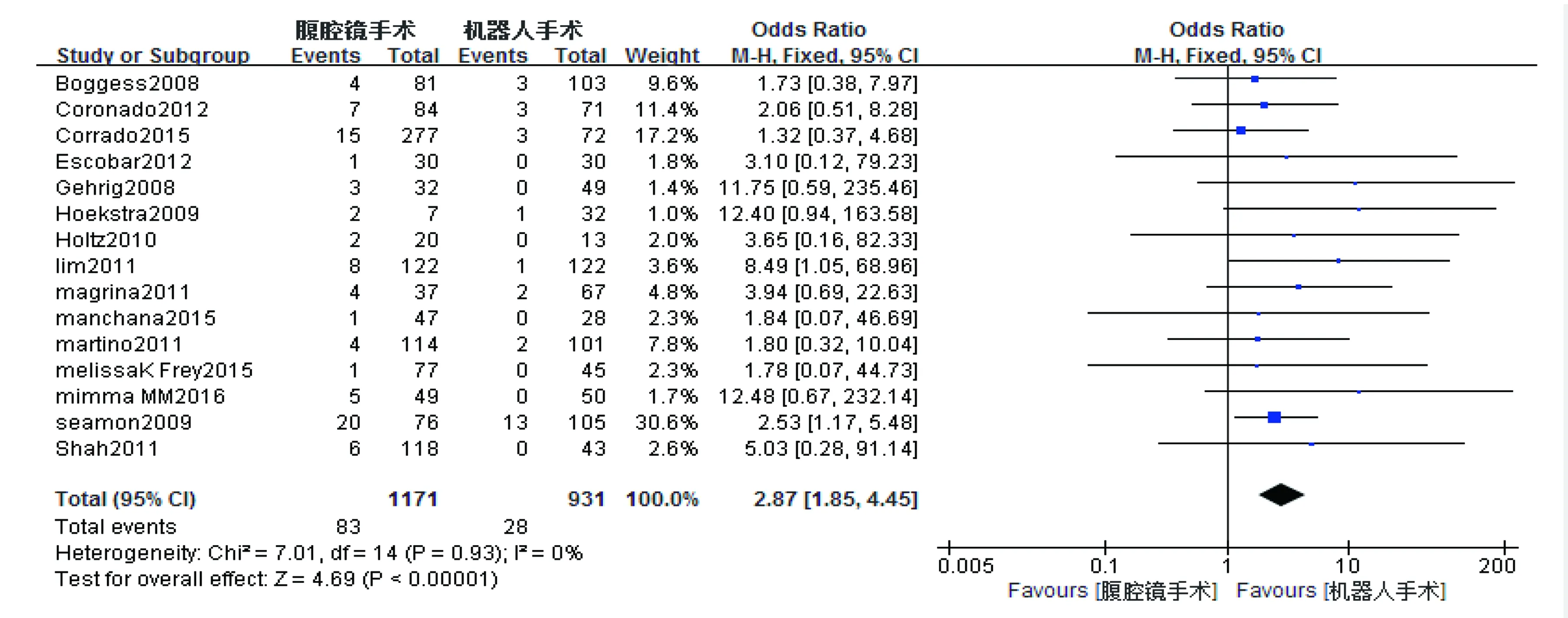
圖6 RAS與CLS術中術式更換率比較圖
7) 術中并發癥 總共有11篇文獻報道了術中并發癥。因I2=0%,采用固定效應模型分析。Meta分析結果顯示,RAS與CLS比較術中并發癥差異有統計學意義,且RAS比CLS術中并發癥發生率明顯減少(OR=2.58,95%CI=1.48~4.47,P=0.0008),詳見圖7。
8)術后并發癥 總共有11篇文獻報道了術后并發癥。因I2=12%,采用固定效應模型分析。Meta分析結果顯示,RAS與CLS比較術后并發癥發生率差異無統計學意義(OR=1.22,95%CI=0.92~1.61,P=0.16),詳見圖8。
9)總并發癥 總共有21篇文獻報道了手術總的并發癥。因I2=0%,采用固定效應模型分析。Meta分析結果顯示,RAS與CLS比較總并發癥差異有統計學意義,且RAS比CLS總并發癥發生率明顯減少(OR=1.27,95%CI=1.02~1.58,P=0.03),詳見圖9。
10) 盆腔淋巴結清掃數目 總共有16篇文獻報道了盆腔淋巴結清掃數目。因I2=87%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS比較盆腔淋巴結清掃數目差異無統計學意義(WMD=-0.50,95%CI=-1.97~0.96,P=0.50),詳見圖10。
11)腹主動脈旁淋巴結清掃數目 總共有13篇文獻報道了腹主動脈旁淋巴結清掃數目。因I2=97%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS比較腹主動脈旁淋巴結清掃數目差異無統計學意義(WMD=-0.006,95%CI=-1.84~1.72,P=0.94),詳見圖11。
12)總淋巴結清掃數目 總共有13篇文獻報道了總淋巴結清掃數目。因I2=95%,采用隨機效應模型分析。Meta分析結果顯示,RAS與CLS比較總淋巴結清掃數目差異無統計學意義(WMD=-1.64,95%CI=-5.69~2.41,P=0.43,詳見圖12)。
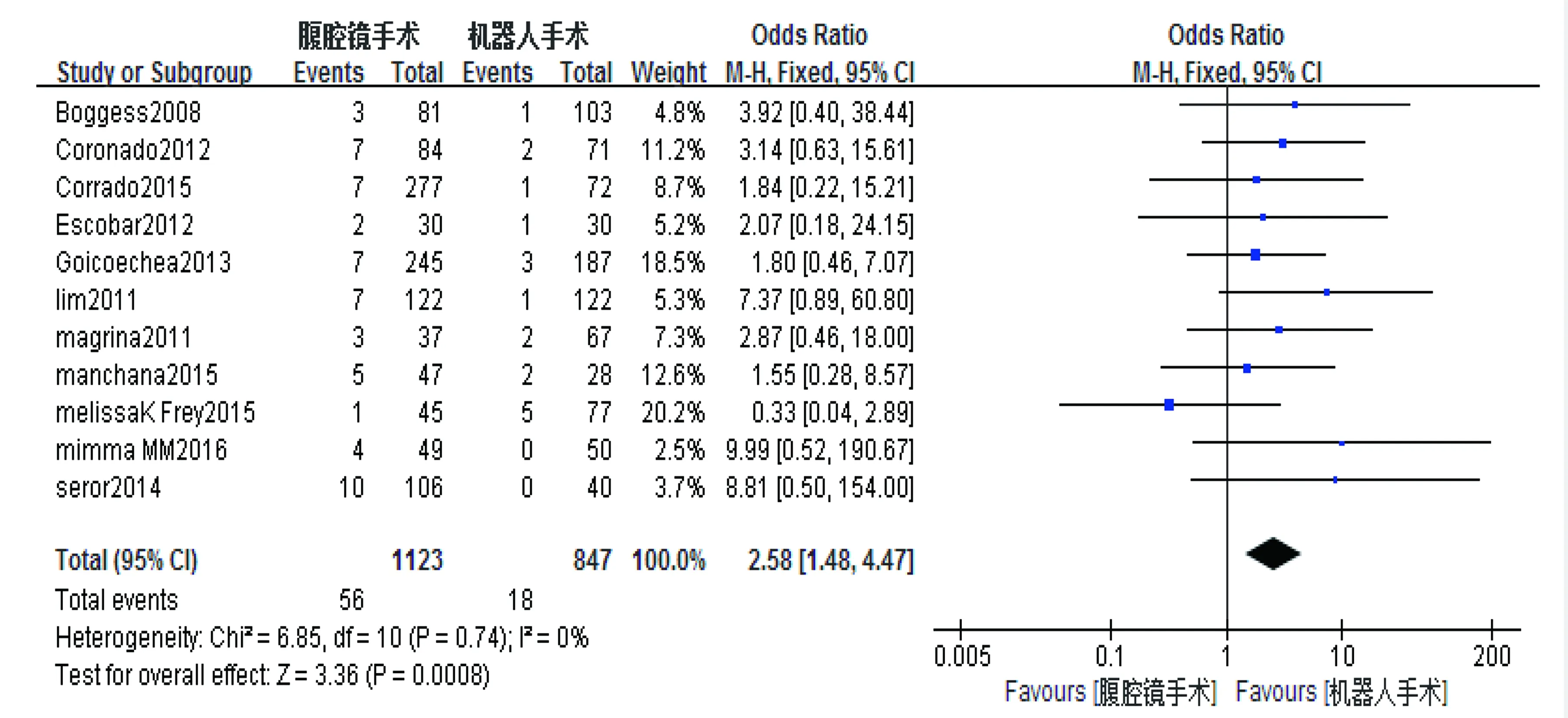
圖7 RAS與CLS手術術中并發癥比較圖
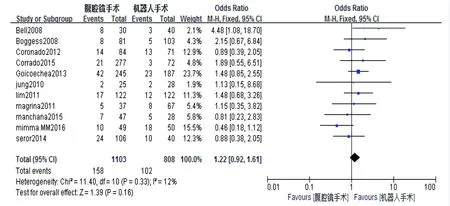
圖8 RAS與CLS手術術后并發癥比較圖
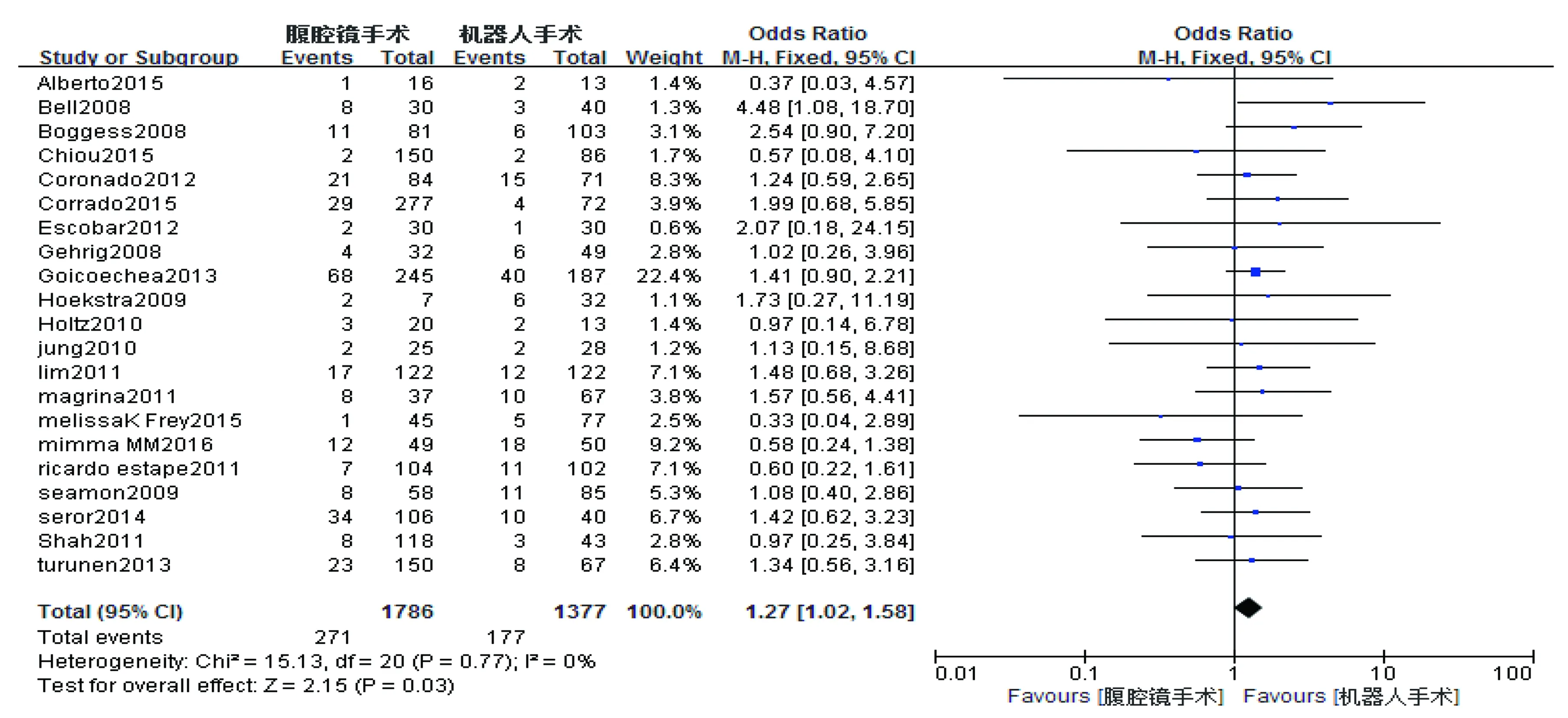
圖9 RAS與CLS手術總并發癥比較圖
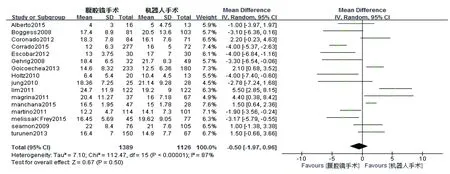
圖10 RAS與CLS盆腔淋巴結清掃數目比較圖
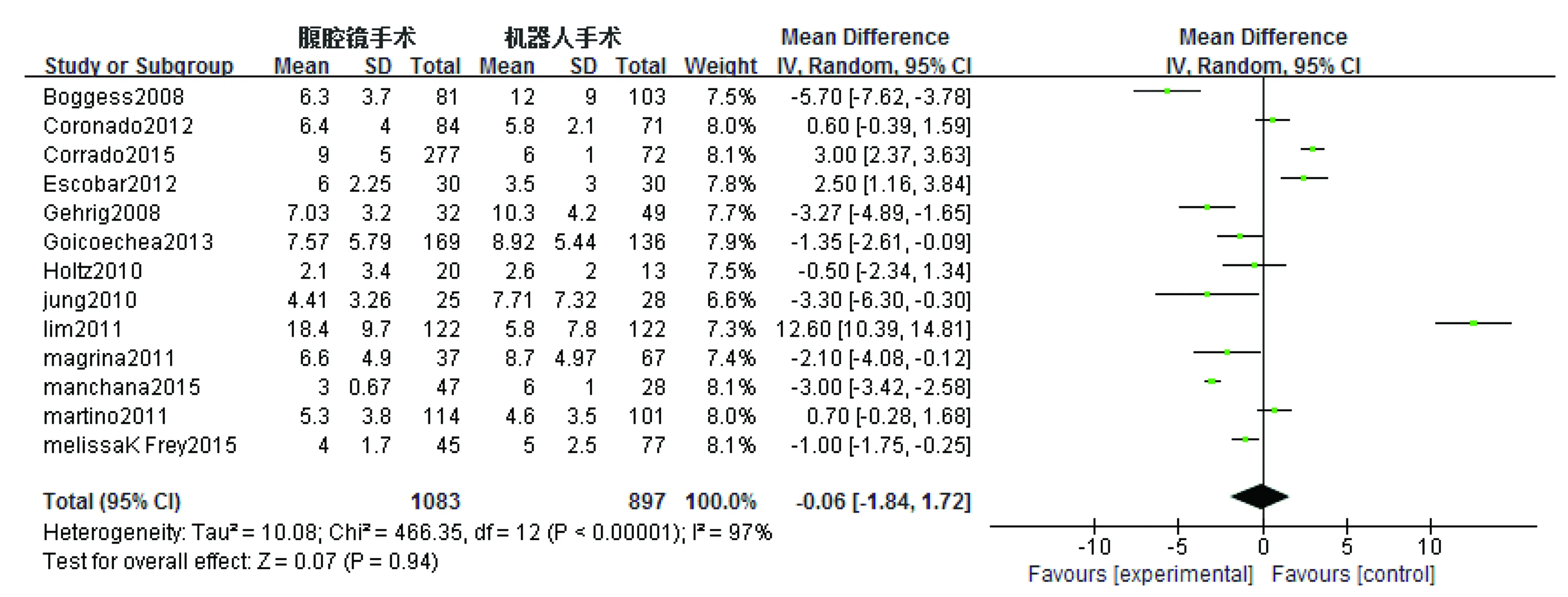
圖11 RAS與CLS腹主動脈旁淋巴結清掃數目比較圖
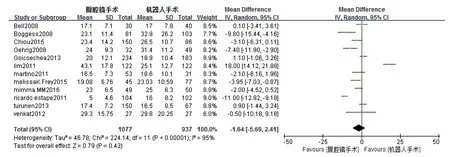
圖12 RAS與CLS總淋巴結清掃數目對比圖
13) 發表偏移 將手術總并發癥做漏斗圖進行分析,從圖中可以看出散點分布較對稱,表明發表偏移較小(詳見圖13)。
3 討論
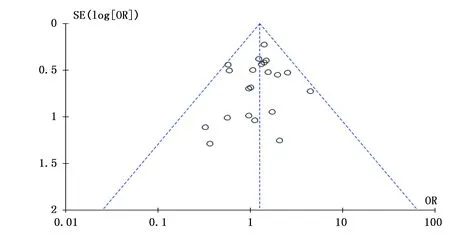
圖13 手術總并發癥發表偏移的漏斗圖
本文通過Meta分析比較了RAS與CLS在治療子宮內膜癌中的各方面指標,結果表明:通過RAS治療子宮內膜癌的術中失血量、術后住院時間、術中術式更換率、術中并發癥和手術總并發癥明顯低于CLS組,但是手術花費較CLS組更高,手術時間、術中輸血人數和術后并發癥兩種手術方式無明顯差異。現進一步分析可能的原因:①手術時間:兩種不同手術方式的手術時間在不同文獻中的統計結果并不一致,目前RAS手術時間總體要比CLS長。由于RAS 是一種新的手術操作方式,操作者需要逐漸適應后才能熟練操作,學習曲線時間較長。Melissa等[27]報道了隨著手術經驗的積累,RAS手術時間明顯縮短。②術中失血量:RAS具有三維立體視野、畫面穩定、術者操作不易疲勞等特點,使手術視野更加清晰,可以準確避過細小血管,同時也能及早發現出血點并快速止血,從而相較于CLS減少了術中出血量。③術后住院時間:RAS相較于CLS更為微創,對手術區域組織損傷更少,且對腸管刺激更小,有利于患者術后恢復,進而住院時間短。④術中術式更換率:一般術中更換手術方式除了因為患者手術區域粘連嚴重、器械無法到達手術區域及腫瘤過大微創手術無法切除等術前因素,還包括術中損傷了重要組織及器官導致的大量出血、腹腔鏡下無法修補損傷等因素。RAS因具有視野清晰、操作定位精準等優勢,術中術式更換率明顯低于CLS。⑤術中并發癥:從納入的文獻中我們可以發現血管、輸尿管、腸管、膀胱及神經的損傷發生率,RAS明顯少于CLS。這可能是因為RAS中高清晰的三維顯示效果,使得手術者能夠清楚分辨組織和器官,同時機器人的手臂能進行伸縮,各種平面的旋轉動作,使手術者操作定位更加精準,減少了不必要的損傷。⑥手術花費:達芬奇手術機器人系統的建立需要花費上百萬美元,每年還需要幾十萬美元的維護費用,患者施行RAS手術需要更多費用來彌補前期的投入。當此項技術成熟并普及開來,后期手術花費會明顯降低。
本研究還存在一定的局限:①雖然納入的文獻質量評價比較好,但是只存在一篇隨機對照試驗,缺乏大量高質量的隨機對照試驗來支持本文觀點。②不同文獻因術者技術水平和統計標準的不一致,導致一些指標異質性較高,數據說服力不強。③雖然納入的文獻術前做了子宮內膜癌分期,但是未詳細比較不同分期手術之間的手術結果。因為分期手術的術式和操作難度不一致,從而導致手術時間、術中失血量、術中及術后并發癥等手術結果不一致。術前患者有高血壓、糖尿病、肥胖、子宮內膜異位等影響手術結果的伴發病癥也沒有單獨與無伴發病癥組比較。未考慮這些影響因素可能導致統計結果不準確。
總而言之,機器人輔助腹腔鏡技術的發展,降低了傳統腹腔鏡在手術中的操作難度和一些限制。同傳統腹腔鏡技術在開展之初一樣,機器人輔助腹腔鏡技術也需要一定時間的訓練和經驗的累積。我們可以看到過去20余年中機器人輔助手術在許多手術科室都取得了較大的成就,但是在臨床上應該根據術者自身技術水平、患者的病情和經濟條件綜合分析最適合的手術方式,不要過分依賴先進的儀器設備。同時,也還需要收集大量、可靠的資料,對機器人輔助手術的臨床價值做出更加具體客觀的評價。相信隨著技術不斷地成熟,機器人輔助手術將在婦科手術領域取得更大的成就。
猜你喜歡
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
河北畫報(2020年10期)2020-11-26 07:20:50
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
西南軍醫(2014年5期)2014-04-25 07:42:48
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36
終身教育研究(2014年5期)2014-02-28 01:23:06