連桿機構在仿生類科普展品中的應用
2018-11-23 07:23:54洪先亮李瑞敏方猛仝文浩劉衛莊合肥通用機械研究院有限公司
安徽科技 2018年6期
◎文/洪先亮 李瑞敏 方猛 仝文浩 劉衛莊(合肥通用機械研究院有限公司)
機械類展品一直是科技館中不可或缺的重要組成部分,因具有較高的趣味性和較強的互動性而備受青睞,而連桿機構更是眾多機械結構里較為經典的一種。傳統的連桿類展品多采用直觀演示的方法,雖能展示相關原理,但大多數結構過于簡單,演示現象也較為枯燥。研究發現,生物所具備的功能比迄今任何人工制造的機械都優越得多[1],這些生物的結構和功能在機械設計方面給了人們很多啟發,如果能將仿生與連桿機構結合到一起,可以開拓出一種機械類展品的新模式。

自然界中的生物雖種類繁多,但在行為動作方面卻有著許多相似之處,如鳥類的飛翔動作就有許多共性。將這些共性動作進行分析總結,選擇具有代表性的物種,并運用連桿機構進行動作擬合,可設計出一系列連桿仿生類科普展品。
一、連桿機構的理論基礎
平面連桿機構是由若干構件用低副(轉動副、移動副)連接組成的平面機構[2]。最簡單的平面連桿機構由4個構件組成,稱為平面四桿機構,常見類型為曲柄搖桿機構(圖 1a)、雙曲柄機構(圖 1b)、雙搖桿機構(圖 1c)。平面連桿機構主要用于實現某些特定軌跡、位置或運動規律的運動,實現從動件運動形式及運動特性的改變等。

圖1 平面四桿機構
連桿機構具有形狀簡單易加工、承載能力大、運動軌跡多樣等優點[3],但設計難度較大。連桿機構的設計,首先要根據工作的需要選擇功能合適的機構類型,再按照所給定的運動要求和其他附加要求(如傳動角的限制等)確定機械運動簡圖的尺寸參數[4]。連桿機構的設計方法有解析法、幾何作圖法和實驗法,解析法比較精確,作圖法比較直觀[5],實驗法常需要試湊。
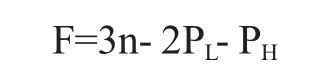
連桿機構的運動軌跡較難控制,實現特定運動要求需保證連桿機構具有確定的相對運動。而機構具有確定相對運動的必要條件為:運動鏈的自由度必須大于零,主動構件數等于運動鏈的自由度[6]。若運動鏈中包括固定構件在內共有N個構件,除去固定構件后,運動鏈中的運動構件數n=N-1。設運動鏈中低副(回轉副或移動副)數目為PL個,高副(滾滑副)數目為PH個,則自由度F的計算公式為:
計算連桿機構自由度時需注意三個問題:當m(m≥3)個構件在同一軸線上用回轉副相聯接構成復合鉸鏈[7]時(見圖2a),算作m-1個回轉副;排除不影響機構中輸出與輸入關系的局部自由度(見圖2b);排除重復約束的虛約束(見圖2c)。
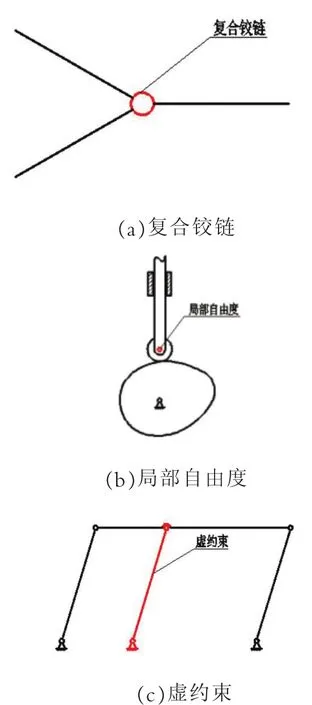
圖2 自由度計算特例
二、連桿機構的仿生應用
1.機械鳥
鳥類飛行時翅膀作扇動等動作,機械鳥展品由曲柄搖桿機構衍生而來,并結合球頭關節實現鳥類飛行動作的擬合,除去傳動機構,該展品的關鍵結構如圖3所示。機械鳥的飛行動作擬合模塊主要由曲柄、連桿、搖桿、球頭關節等組成,曲柄為主動構件,球頭關節的球頭端固定于連桿上,連桿在平面內的平移和轉動動作帶動球頭關節,使其空間位姿發生改變,并帶動翅膀實現翻轉扇動等動作。
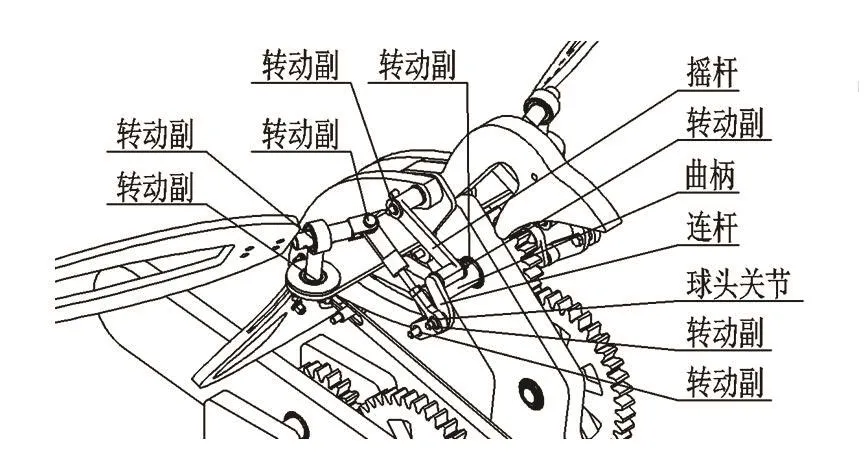
圖3 機械鳥關鍵結構
該展品的飛行動作擬合模塊的運動構件數目為6個,其中轉動副為8個,高副為1個,代入自由度計算公式得該運動鏈自由度為1。因曲柄為主動構件,故該飛行動作擬合模塊具有確定的相對運動(最終效果見圖4)。

圖4 機械鳥效果圖
2.機械馬
馬的奔跑動作主要特征是四肢交替前踢和后蹬,機械馬展品的動作擬合模塊由數個曲柄搖桿機構并聯而成。由于四肢運動模塊均采用相同結構,因此以左前腿為例講述機械馬的工作原理。如圖5所示,機械馬主要由曲柄轉盤、連桿1、搖桿1、聯動桿1、連桿2、搖桿2、聯動桿2等組成,各連桿構件之間采用轉動副聯接。曲柄轉盤、連桿1、搖桿1組成曲柄搖桿機構1,曲柄轉盤、連桿2、搖桿2組成曲柄搖桿機構2。通過聯動桿1和聯動桿2將這兩個曲柄搖桿機構并聯起來,以曲柄轉盤為主動構件,使兩個曲柄搖桿機構作聯動運動,實現馬的奔跑動作。
機械馬的動作擬合模塊運動構件數目為7個,轉動副為8個,復合鉸鏈處轉動副為2個,故轉動副數目為10個,高副數目為0個,代入自由度計算公式可得該運動鏈自由度為1。因曲柄轉盤為主動構件,故機械馬動作擬合模塊具有確定的相對運動(最終效果見圖6)。
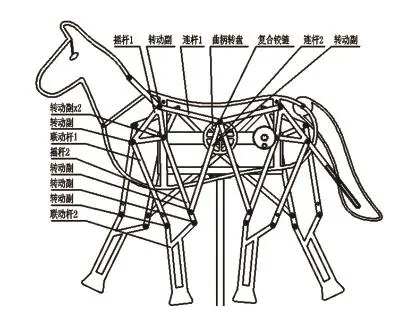
圖5 機械馬關鍵結構

圖6 機械馬效果圖
3.機械花
機械花展品主要模擬蓮花的閉合與開放狀態。當蓮花閉合時,花瓣收攏,花苞呈細長狀;當蓮花開放時,花瓣張開,層層堆疊。該展品主要通過曲柄滑塊機構驅動花瓣實現蓮花的張開與閉合動作,各花瓣作同步聯動運動。如圖7所示,該展品動作擬合模塊主要由曲柄、連桿、滑塊、花瓣等組成。滑塊與花瓣通過銷槽副聯接,滑塊上下往復移動帶動花瓣繞機架轉動,從而實現花瓣的開合動作。
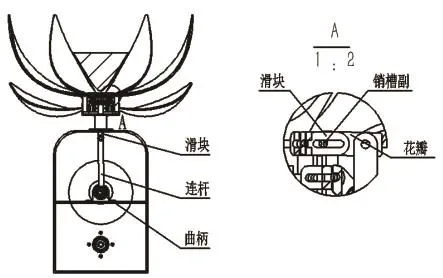
圖7 機械花關鍵結構
機械花的動作擬合單元運動構件數目為4個,轉動副為4個,移動副為1個,銷槽副為1個,代入自由度計算公式得運動鏈自由度為1。因曲柄為主動構件,故該機構具有確定的相對運動(最終效果見圖8)。

圖8 機械花效果圖
三、總結與展望
連桿機構在科普展品中應用較為廣泛,將簡單的平面連桿機構通過串并聯或者聯動的方式結合起來,可以得到意想不到的運動軌跡。本文以機械鳥、機械馬和機械花為例講述了連桿機構在仿生類科普展品中的應用,并提供了關鍵部件的設計方案和計算方法,為將來其他種類的連桿仿生展品研制提供借鑒。
除了連桿機構,還有許多經典機械結構可以考慮“仿生化”,如齒輪傳動機構、凸輪傳動機構、槽輪傳動機構等,也可以將這些經典結構組合,開發出大體量綜合型仿生展品。該類展品可以以主題形式組合展示,具有較高的趣味性和吸引力,對提升觀眾對于機械的學習興趣有著重要意義。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
科技知識動漫(2016年8期)2016-07-29 20:40:09