帶有時(shí)變時(shí)滯和未知死區(qū)的純反饋系統(tǒng)的自適應(yīng)跟蹤控制
2018-12-05 03:01:08,
,
(山東科技大學(xué) 數(shù)學(xué)與系統(tǒng)科學(xué)學(xué)院, 山東 青島 266590)
近幾年,反步法和模糊邏輯系統(tǒng)在解決非線性自適應(yīng)控制系統(tǒng)中得到了迅速發(fā)展并取得了許多重要成果。實(shí)際的非線性系統(tǒng)中經(jīng)常出現(xiàn)時(shí)變時(shí)滯和未知死區(qū)的情況, 導(dǎo)致系統(tǒng)不穩(wěn)定而造成較大誤差。針對(duì)非線性系統(tǒng)中穩(wěn)定性分析和控制系統(tǒng)的設(shè)計(jì),研究者們提出了許多先進(jìn)控制方法,如模糊控制[1- 3]、滑模控制[4-5]和自適應(yīng)控制[6-8],這些方法通過(guò)在線學(xué)習(xí)調(diào)節(jié)自適應(yīng)參數(shù),驅(qū)動(dòng)控制系統(tǒng)滿(mǎn)足預(yù)期的要求。作為一個(gè)結(jié)構(gòu)化策略,自適應(yīng)同步控制使控制系統(tǒng)的分析和綜合變得更清晰、更方便,但未知非線性函數(shù)的存在使得控制器的設(shè)計(jì)極為困難。由于模糊邏輯系統(tǒng)和神經(jīng)網(wǎng)絡(luò)能夠很好地處理未知非線性函數(shù),可通過(guò)模糊邏輯系統(tǒng)和神經(jīng)網(wǎng)絡(luò)來(lái)設(shè)計(jì)自適應(yīng)同步控制,相應(yīng)的適應(yīng)性模糊和自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制方案被提出[9-12]。
在實(shí)際的應(yīng)用系統(tǒng)中,經(jīng)常出現(xiàn)的時(shí)間延遲會(huì)導(dǎo)致系統(tǒng)控制效果不佳、甚至系統(tǒng)不穩(wěn)定的情況出現(xiàn)[13-14]。因此,在控制器的設(shè)計(jì)過(guò)程中采取一個(gè)系統(tǒng)約束是非常重要的。文獻(xiàn)[15]提出了一個(gè)基于觀測(cè)器的非線性系統(tǒng)的自適應(yīng)模糊控制方法。結(jié)合帕德近似和自適應(yīng)反步法,文獻(xiàn)[16]提出了一種新穎的控制方法來(lái)處理輸入時(shí)滯的問(wèn)題。不同于上面的結(jié)果,對(duì)于嚴(yán)格反饋形式下的多輸入多輸出時(shí)變時(shí)滯控制系統(tǒng),文獻(xiàn)[17]提供了一個(gè)模糊跟蹤控制方案。
另外,死區(qū)也是實(shí)際應(yīng)用中常見(jiàn)的非線性現(xiàn)象,它會(huì)大大降低系統(tǒng)的控制性能,甚至能夠?qū)е孪到y(tǒng)不穩(wěn)定。死區(qū)問(wèn)題一直受到廣泛的關(guān)注[18-20]。文獻(xiàn)[21]對(duì)非對(duì)稱(chēng)死區(qū)輸入的非線性系統(tǒng)的自適應(yīng)模糊跟蹤控制問(wèn)題進(jìn)行了研究。當(dāng)不可測(cè)的狀態(tài)變量和死區(qū)同時(shí)發(fā)生時(shí),文獻(xiàn)[22]研究了一類(lèi)嚴(yán)格反饋非線性系統(tǒng)形式中的基于觀測(cè)器的自適應(yīng)模糊跟蹤控制方案。對(duì)于局部非線性的死區(qū)系統(tǒng),文獻(xiàn)[23]設(shè)計(jì)了3個(gè)不確定多變量非線性系統(tǒng)的模糊自適應(yīng)控制器。但由于很多實(shí)際過(guò)程可以表示為不確定的純反饋系統(tǒng),現(xiàn)有的關(guān)于嚴(yán)格反饋系統(tǒng)的研究成果不能用于這種系統(tǒng)不確定的純反饋形式的非線性,因?yàn)樵趇階微分方程中會(huì)出現(xiàn)狀態(tài)變量xi+1。基于模糊近似,文獻(xiàn)[24]和[25]關(guān)于純反饋系統(tǒng)可測(cè)量的狀態(tài)變量和不可測(cè)的狀態(tài)變量分別提出了一種自適應(yīng)跟蹤控制方法。為了探討一類(lèi)純反饋非線性系統(tǒng)的自適應(yīng)模糊控制時(shí)變時(shí)滯和死區(qū)的問(wèn)題,在控制器的設(shè)計(jì)過(guò)程中,可以通過(guò)模糊邏輯系統(tǒng)近似系統(tǒng)中存在的未知函數(shù),使用死區(qū)斜坡的信息來(lái)解決死區(qū)問(wèn)題。
本研究考慮時(shí)變時(shí)滯和死區(qū)同時(shí)存在于不確定純反饋系統(tǒng)的情況,使用中值定理解決純反饋結(jié)構(gòu)中設(shè)計(jì)控制器的困難,使用自適應(yīng)反步法[26-28]設(shè)計(jì)了一個(gè)虛擬控制輸入信號(hào),并利用模糊邏輯系統(tǒng)來(lái)解決系統(tǒng)的未知函數(shù)問(wèn)題,設(shè)計(jì)了一個(gè)自適應(yīng)模糊控制器來(lái)避免未知死區(qū)的干擾。該控制方案在保證閉環(huán)系統(tǒng)所有信號(hào)半全局一致有界的同時(shí),使系統(tǒng)的跟蹤誤差收斂到原點(diǎn)的一個(gè)小鄰域內(nèi)。
1 問(wèn)題分析
考慮下面的非線性隨機(jī)純反饋系統(tǒng)

(1)

(2)
其中,v表示死區(qū)特征輸入,mr和ml表示死區(qū)的右斜率和左斜率,br和bl表示非線性輸入的間斷點(diǎn)。
定義1[9]對(duì)于任意函數(shù)V(x,t)∈C2,1和隨機(jī)微分方程 (1),定義微分算子
(3)
其中Tr(A)是A的跡。


(4)
則對(duì)于任一x0∈Rn,有

(5)
假設(shè)1[12]存在正常數(shù)bm和bM,使得0≤bm≤min{ml,mr}≤max{ml,mr}≤bM,參數(shù)mr和ml是未知的正常數(shù)。
方便起見(jiàn),根據(jù)文獻(xiàn)[12],死區(qū)(2)的輸出能夠表示成
u=mv+d。
(6)
其中,
根據(jù)假設(shè)1,有|d|≤d*,其中d*=bMmax{|br|,|bl|}。



(7)

引理3[12](楊氏不等式) 對(duì)?(x,y)∈R2, 有
(8)
其中,ε>0,p>1,q>1, 并且(p-1)(q-1)=1。
在反步法設(shè)計(jì)過(guò)程中,將用模糊邏輯來(lái)近似系統(tǒng)中的未知非線性函數(shù)。模糊邏輯系統(tǒng)函數(shù)[26]可以描述為:
y(z)=WTΓ(z)。
(9)
其中,z∈ΩZ?Rq是狀態(tài)輸入矢量,q是模糊邏輯系統(tǒng)的輸入維度,權(quán)向量W=[w1,w2,…,wl]T∈Rl,l>1是節(jié)點(diǎn)數(shù),φ(z)=[φ1(z),φ2(z),…,φl(shuí)(z)]T表示基函數(shù)向量,φi(z)表示高斯函數(shù)。
(10)
其中,μi=[μi1,μi2,…μiq]T,i=1,…,l,表示鄰域的中心,η為高斯函數(shù)的廣度。模糊邏輯函數(shù) (9) 能夠逼近緊集ΩZ?Rq上的任意連續(xù)函數(shù)
f(z)=W*TΓ(z)+δ(z),?z∈ΩZ∈Rq,
(11)

(12)



(13)
2 自適應(yīng)模糊控制方案

(14)
(15)

其中,λi>0,b>0,ai>0和σ>0均是已知的常數(shù),

在接下來(lái)反步法的每一步中, 用到以下坐標(biāo)變換
z1=x1-yd,zi=xi-αi-1,i=2,…,n。
(17)
第1步:根據(jù)坐標(biāo)變換(17),有
(18)
考慮下面的李雅普諾夫-克拉索夫斯基函數(shù)
(19)
其中
(20)
r是一個(gè)已知的正常數(shù)。
則
(21)
其中
(22)
根據(jù)引理2和不等式(8)得:
(23)
(24)
把式(22)、(23)和(24)代入式(21)得
(25)
根據(jù)假設(shè)2,得到
(26)
則(25)可簡(jiǎn)化為
(27)

(28)

(29)
代入式(28)得
(30)
根據(jù)公式(14),得
(31)
把式(31)代入式(30)得
(32)
第i(2≤i≤n-1)步:令
根據(jù)坐標(biāo)變換(17),zi=xi-αi-1。類(lèi)似于第1步的步驟,得到
(33)
其中,
第n步:在這一步中, 將構(gòu)造一個(gè)實(shí)際控制信號(hào)v。令Vn=Vn-1+Vη n,其中
由坐標(biāo)變換(17)知,zn=xn-αn-1,其微分為
(34)
其中
(35)
Vn的微分可以表示成
(36)
其中
(37)
根據(jù)引理2和楊氏不等式(8)得
(38)
(39)
(40)
把式(35)和式(37)~(40)代入式(36)得
(41)
(42)
利用模糊邏輯系統(tǒng),令
(43)
(44)
由公式(6)和(15)可得
(45)
(46)
把公式(6)和式(43)~(46)代入式(42)得
(47)
3 穩(wěn)定性分析
令
則根據(jù)公式(32)、(33)和(47),有
(48)
由Kn的定義,由引理4得
(49)
進(jìn)而公式(48)可以寫(xiě)成
LV≤-a0V+b0。
(50)
由引理1得
(51)
又
(52)
則
(53)
根據(jù)式(52)和(53),得到

(54)
因此,根據(jù)以上的反步法設(shè)計(jì),一個(gè)自適應(yīng)模糊控制方案完成。根據(jù)不等式(53)、(54)和V的定義,在|zj|<0.255 4vj條件下,自適應(yīng)模糊系統(tǒng)(1)中的所有信號(hào)半全局一致有界,并且,跟蹤誤差zj收斂到緊集
(55)
根據(jù)以上分析和討論,得出定理1。
定理1對(duì)于帶有時(shí)變和未知死區(qū)的非線性隨機(jī)純反饋控制系統(tǒng)(1),基于模糊邏輯系統(tǒng)近似,利用反步技巧,通過(guò)設(shè)計(jì)適當(dāng)?shù)睦钛牌罩Z夫-克拉索夫斯基函數(shù)(19),所提出的帶有恰當(dāng)虛擬控制信號(hào)(14)、實(shí)際控制信號(hào)(15)和自適應(yīng)律(16)的控制方案保證了閉路系統(tǒng)(1)的所有控制信號(hào)半全局一致有界,并且跟蹤誤差zj收斂到緊集(55)。
4 仿真例子
下面給出一個(gè)數(shù)值例子來(lái)驗(yàn)證所提出的控制方案的可行性。考慮下面的二階隨機(jī)純反饋控制系統(tǒng):

其中u表示系統(tǒng)死區(qū)(2),參數(shù)mr=ml=1.5,bl=br=1。
本文的研究目標(biāo)是設(shè)計(jì)一個(gè)自適應(yīng)模糊控制信號(hào)v,使得系統(tǒng)所有信號(hào)半全局一致最終有界,并且系統(tǒng)輸出y跟蹤到一個(gè)設(shè)定的參考信號(hào)yd,其中yd=sin(0.5t)+0.5sin(1.5t)。仿真過(guò)程中,設(shè)定虛擬控制信號(hào)(14),實(shí)際控制信號(hào)(15)和自適應(yīng)律(16)中的參數(shù)分別為λ1=λ2=2.5,a1=4,a2=0.5,σ=0.03,b=1。初始條件x(0)=[0.2,0.3]T,θ(0)=0.01,z1=x1-yd,z2=x2-α1。
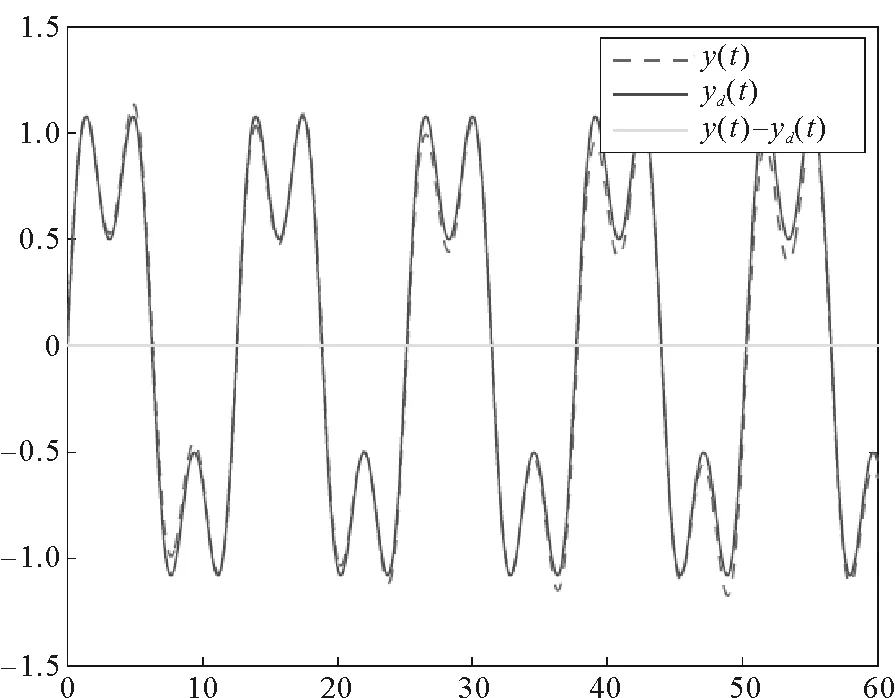
圖1 y(t)和yd(t)的軌跡Fig.1 Trajectories of y(t)and yd(t)
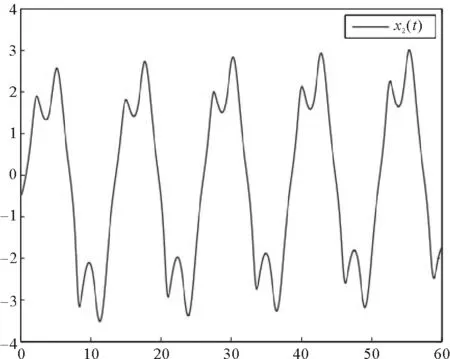
圖2 狀態(tài)變量x2(t)的軌跡Fig.2 Trajectory of state vector x2(t)
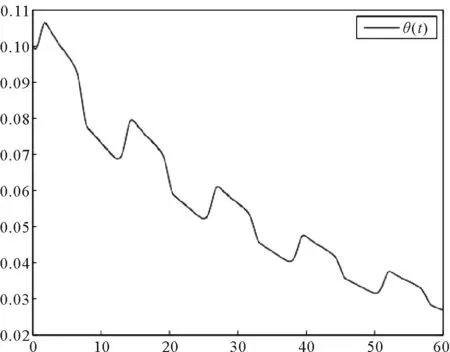
圖3 自適應(yīng)參數(shù)θ(t)的軌跡Fig.3 Trajectory of adaptive parameter θ(t)
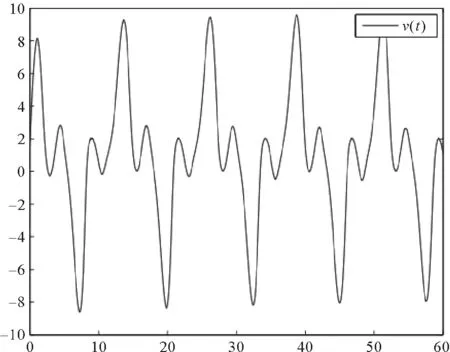
圖4 控制信號(hào)v(t)的軌跡Fig.4 Trajectory of control signal v(t)
從仿真結(jié)果可以看出,系統(tǒng)輸出y跟蹤到一個(gè)設(shè)定的參考信號(hào)yd,而且系統(tǒng)所有信號(hào)半全局一致有界。
5 結(jié)論
本研究對(duì)于帶有時(shí)變時(shí)滯和未知死區(qū)的純反饋非線性隨機(jī)系統(tǒng),提出了一個(gè)自適應(yīng)模糊控制方案。通過(guò)利用模糊邏輯系統(tǒng)近似來(lái)識(shí)別系統(tǒng)中的未知函數(shù),基于一個(gè)適當(dāng)?shù)睦钛牌罩Z夫-克拉索夫斯基函數(shù),結(jié)合自適應(yīng)反步法,解決了系統(tǒng)中的時(shí)變時(shí)滯和未知死區(qū)問(wèn)題,通過(guò)設(shè)計(jì)一個(gè)恰當(dāng)?shù)淖赃m應(yīng)模糊控制器,保證了隨機(jī)純反饋控制系統(tǒng)的所有信號(hào)半全局一致有界, 跟蹤誤差最終收斂到原點(diǎn)的一個(gè)小鄰域。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16