基于模糊控制的智能節水灌溉控制系統設計
2019-01-09 06:51:14劉天宇徐曉輝
江蘇農業科學 2018年23期
吳 迪, 劉天宇, 宋 濤, 徐曉輝
(河北工業大學電子信息工程學院,天津 300401)
我國是一個嚴重缺水的國家,農業灌溉用水量占各行業總用水的60%以上,而傳統的溝灌、漫灌或人工淋水的灌溉方式對水的有效利用率只有45%,大部分的水在輸送和灌溉過程中被白白浪費掉了[1],相比之下,發達國家農業用水有效利用率高達70%~80%。近年來,噴灌、滴灌等節水灌溉技術得到迅速推廣和應用,其中滴灌水的利用率更是達到了95%,同時還可以結合施肥,提高肥效1倍以上,節水增產效果明顯,提高滴灌等節水灌溉方式的比重將是我國未來灌溉的發展方向[2-3]。因此,適用于滴灌等節水灌溉方式的灌溉控制系統應運而生。
在節水灌溉中,目前大多數仍是手動控制,即管理人員根據自己的經驗對農田進行灌溉,還有一些半自動灌溉控制系統,大多為時間型控制(或者稱為時序控制)[4],即管理人員憑借經驗設定好電磁閥的開啟和持續時間自動運行,這2種灌溉方式都比較粗糙,而且不能根據作物在不同的土壤質地、不同生長時期、不同的天氣條件下靈活灌溉。
綜上所述,本研究設計一種基于模糊控制的智能節水灌溉控制系統,選用低功耗的C8051系列單片機作為核心處理器,利用無線傳感器網絡和小型氣象站實現對農田信息的采集,運用模糊控制對農田需水量進行分析,并通過射頻技術實現對電磁閥開啟時間的無線控制,以此實現對農作物的精準灌溉,從而達到最大化節水的目的。
1 智能節水灌溉控制系統的組成與工作原理
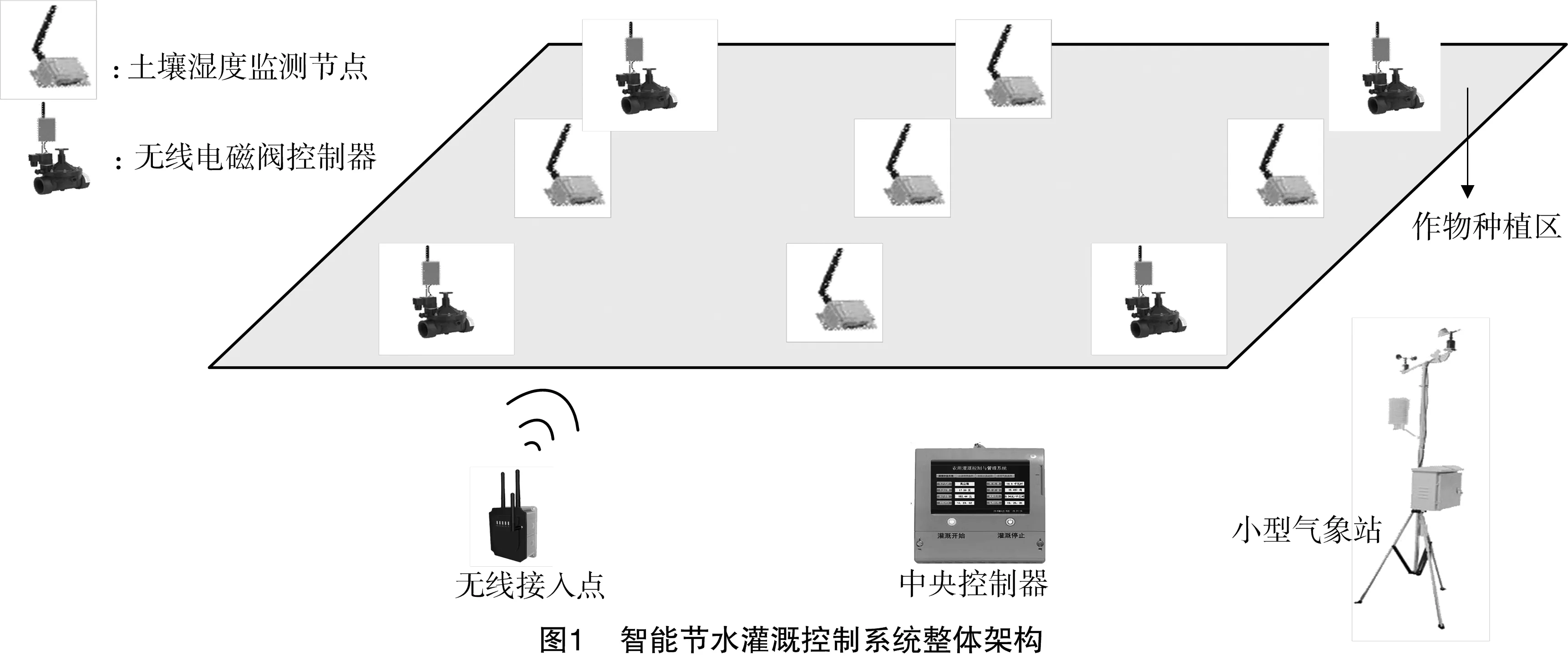
智能節水灌溉控制系統主要由中央控制器、農田信息監測點、無線電磁閥控制器等3個部分組成。系統通過農田信息監測點采集農田的土壤濕度、空氣濕度、空氣溫度、風速、太陽輻射等信息,并通過Wi-Fi或者485總線傳送給中央控制器;中央控制器利用模糊控制算法對接收到的農田信息數據進行分析并存儲,得到當前作物的灌溉決策;當需要灌溉時,中央控制器根據灌溉決策控制射頻發射模塊發送灌溉指令,相應的無線電磁閥控制器接收到指令后開始進行灌溉作業。系統整體架構如圖1所示。
1.1 中央控制器的設計
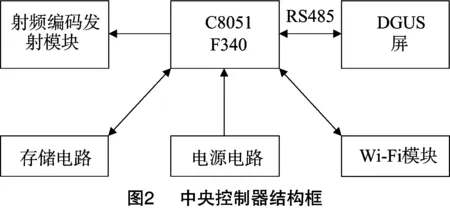
中央控制器包括單片機、射頻編碼發送模塊、Wi-Fi模塊、迪文圖形應用服務軟件(DGUS)屏、存儲電路和電源電路,其結構框如圖2所示。基于對系統功能和成本的考慮,中央控制器選用C8051F340單片機作為微處理器。該芯片體積小、功耗低,有多達64 kB的片內flash存儲器,2個增強型通用異步收發傳輸器(universal asynchronous receiver/transmitter,簡稱UART)和增強型串行外設接口(serial peripheral interface,簡稱SPI),以及40個可編程端口I/O和交叉開關。中央控制器采用LM2596和AS1117電壓調節芯片組成電源電路,輸出5、3.3 V 電壓給其他芯片和模塊供電,如圖3所示。
采用USR-WiFi232-B模塊作為中央控制器與各土壤濕度監測節點之間的通信模塊。此模塊支持AP/STA工作模式,串口速率高達1 Mbit/s,可以實現雙串口三Socket通信,支持超低功耗模式,支持深度休眠。通過網頁或者AT(attention)指令設置好WiFi模塊參數(包括Socket連接協議、端口、串口波特率、數據位、校驗位、停止位、網絡名稱、密碼等)后,選擇STA模式,連接到無線接入點AP。中央控制器的Wi-Fi模塊通過無線接入點實現與土壤濕度監測節點的相互通信。
射頻編碼發射模塊采用PT2264芯片作為編碼器,PT2264支持最大12位三態地址管腳,最多可提供312個地址碼,高達4個數據管腳,從而可大大減少編碼沖突,利用互補金屬氧化物半導體(complementary metal oxide semiconductor,簡稱CMOS)技術, 功耗低、抗噪聲性能高。當需要開啟某個電磁閥時,單片機控制PT2264對A0~A7和A8/D3~A11/D0管腳進行編碼,生成特殊的地址和數據編碼波形(每個管腳可指定“0”“1”“f”3種狀態),并通過DOUT管腳輸出給315 MHz超再生射頻發射模塊,把編碼發送出去。
人機交互設備選用DGUS屏。DGUS屏的配置界面如圖4所示,灌溉狀態指示燈綠色表示正在灌溉,紅色表示已停止灌溉,用戶還可以通過點擊狀態按鈕指示燈來手動開始或停止灌溉。點擊灌溉區域編號還可查看該區域農田預計灌溉時間和環境參數。

1.2 農田信息監測點的設計
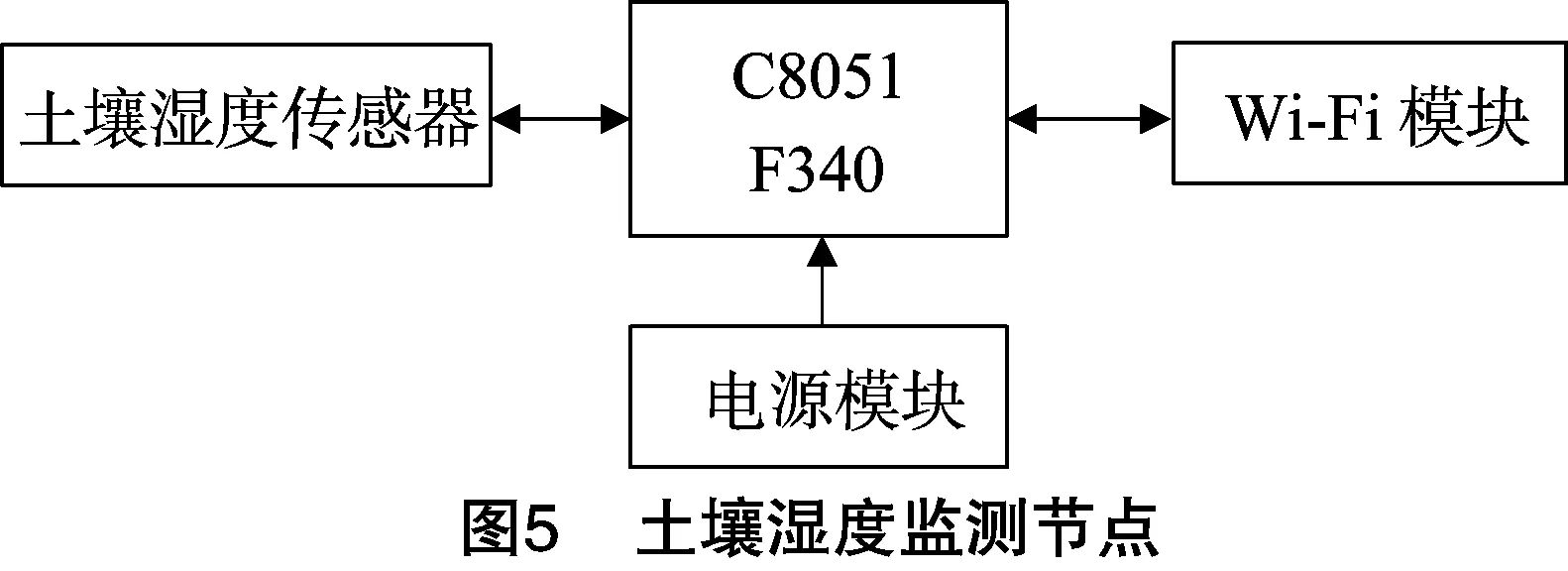
農田信息監測點主要由土壤濕度監測節點和小型氣象站等兩部分構成,小型氣象站架設在中央控制器附近,與中央控制器通過485總線進行通信。土壤濕度監測節點由土壤濕度傳感器、單片機、電源模塊和WiFi模塊組成(圖5)。
Wi-Fi傳輸速率快、開發難度低、成本低且本設計選用的低功耗USR-WiFi232-B模塊體積小、 穩定性也較高、 傳輸距離可達300~400 m,符合在農田環境下低功耗、可靠性強的要求。此外,Wi-Fi模塊方便接入外部網絡,可實現系統與手機、計算機直接互聯,使控制更加靈活多變。對土壤濕度的測量選用TDR土壤水分傳感器,它可以測量土壤的介電常數,從而直接穩定地得到土壤的水分含量。土壤濕度監測節點通過Wi-Fi模塊連接到無線接入點AP,實現與中央控制中心的數據交換,組成一對多的星型拓撲結構無線傳感器網絡。土壤濕度傳感器定時采集不同土壤深度的數據,并通過具有8位逐次逼近式PCF8591 A/D轉換模塊把模擬量轉變成數字量給單片機,單片機再按照設定好的協議把數據封裝成幀,并通過WiFi模塊發送給中央控制器。
1.3 無線電磁閥控制器的設計
無線電磁閥控制器由電源電路、射頻接收電路、電磁閥驅動電路和電磁閥組成(圖6)。其中,選用的磁保持式電磁閥采用掉電保持的關鍵技術。當開啟電磁閥時,只須輸入 50 ms 的12 V正向直流脈沖,之后電磁閥保持工作狀態,無需電能,當須要關閉電磁閥時,再輸入反向信號電流。它靈敏度高、穩定性高、消耗功率極低,這使得選用較小容量蓄電池供電成為可能,且不存在發熱現象,以上特點使該電磁閥能采用全密封方式,防潮防腐性能良好。
相較于大多數固定編碼的射頻收發控制形式,本設計射頻接收電路為自學習型,使用靈活。按下學習開關,PT2294把從射頻接收模塊接收到的編碼波形自動解碼并保存,學習完成后只能識別學習過的編碼,有效防止沖突碰撞。根據從射頻接收電路接收到的指令,電磁閥驅動電路采用H橋驅動芯片L9110產生正反脈沖,從而控制電磁閥的開閉。

2 模糊控制的實現
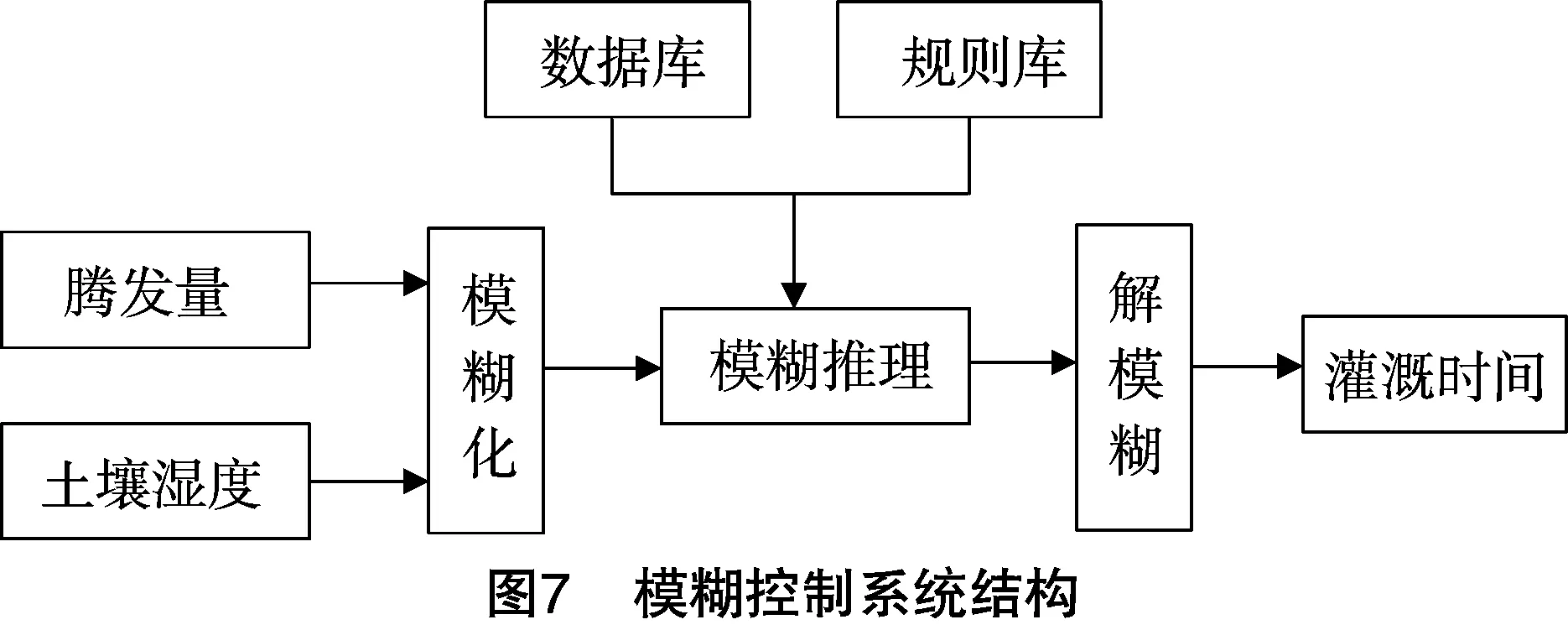
在傳統的控制系統中,都是通過已知的精確數學模型來建立算法,但對于農業灌溉系統,由于其非線性、大慣性、滯后性的特點,想要建立精確的數學模型是很繁瑣的,實現起來非常困難。模糊控制是一種非線性控制方式,是根據專家經驗進行決策,無須建立精確數學模型,在處理農業灌溉這種大慣性系統問題時就顯得十分有效[5-6]。在農業灌溉系統現有的模糊控制中,大多數都只考慮了土壤濕度1個變量,即只以土壤濕度為輸入,從而得到灌溉決策。作物對水分的吸收主要靠根部,而吸收的水主要用于自身生長和蒸騰作用的散失,蒸騰作用又和氣象環境緊密相連。由此可知,土壤條件、氣象條件以及作物生長特性都對作物需水量有重要影響[7]。所以,在本設計中選用作物的騰發量(evapotranspiration,簡稱ET)和土壤濕度(electrical conductivity,簡稱EC)作為輸入變量,作物灌溉時間(U)為輸出。先把2個輸入量模糊化輸入到系統中,然后系統根據數據庫和規則庫進行模糊推理,最后解模糊,輸出作物所需的灌溉時間。模糊控制系統的結構如圖7所示。
2.1 模糊控制輸入量的獲得
模糊控制系統的輸入量土壤濕度由監測節點的土壤濕度傳感器直接測得, 騰發量的獲得則是先根據系統測得的空氣溫濕度和風速等相關參數利用公式計算得到參考作物騰發量(ET0),然后再乘上作物系數求得各階段的實際作物騰發量,計算公式如下:
ET=KCET0。
(1)
式中:KC表示綜合作物系數;ET0表示參考作物騰發量。
研究表明,Penman-Monteith公式使用常規氣象數據即可求得ET0,特別是在變化的氣候環境,計算時間尺度較短的情況下,Penman-Monteith公式計算精度優于其他公式,又具有易于操作等應用價值,故采用Penman-Monteith公式計算參考作物騰發量[8-9],公式如下:
(2)
式中:ET0表示參考作物騰發量,mm/day;Δ表示溫度水汽壓曲線斜率,KPa/C;Rn表示凈輻射,MJ/(m2·d);G表示土壤熱通量密度,MJ/(m2·d);γ表示濕度計常數,KPa/C;T表示2 m高處的平均氣溫,℃;U2表示2 m高處的風速,1/ms;es表示飽和水汽壓,kPa;ea表示實際水汽壓,kPa。
2.2 模糊灌溉決策
以經濟作物番茄為例進行探討。番茄對水分需求很大,一般要求土壤水分含量在45%~90%之間,在不同的生長時期,對水分的需求也不一樣[10]。根據農業部門長期實踐的總結,本系統制定的番茄灌溉生長階段根層土壤水分控制標準如表1所示。

表1 番茄灌溉生長階段根層土壤水分控制標準
以番茄結果期的模糊決策模塊為例,具體介紹灌溉控制策略的實現。由表1可知,番茄結果期最適宜的土壤濕度為75%,低于65%或者高于85%時,番茄不能正常生長發育,因此番茄結果期土壤濕度變化范圍設置為65%~85%,農田環境信息每30 min采集1次,作物騰發量每24 h計算1次。從已有研究數據來看,番茄結果期的騰發量變化范圍在 7~16 mm/d。
系統采用的模糊控制算法為合成推理的查表法。系統先采集土壤濕度,空氣溫濕度等參數,然后對輸入ET和EC以及輸出U進行模糊化,考慮到節水灌溉實際條件和控制精度,把模糊化后的土壤濕度值EC、作物騰發量ET以及灌溉時間U的模糊語言變量劃分為7級{正大,正中,正小,零,負小,負中,負大},簡記為{PB,PM,PS,ZO,NS,NM,NB},其論域設為:ET,{3,2,1,0,-1,-2,-3};EC,{3,2,1,0,-1,-2,-3};U,{6,5,4,3,2,1,0}
其中,對于EC而言,ZO表示最適土壤濕度;NB、NM、NS表示小于最佳土壤濕度的3個程度,強度依次減弱;NB表示極度缺水;PS、PM、PB表示大于最佳土壤濕度的3個程度,強度依次增加;PB表示極度缺水;對于騰發量ET,PB到NB分別表示騰發量的從強到弱的7個強度;對于灌溉時間U、PB到NB代表灌溉時間從60 min到0 min依次減少。
在把輸入由精確量轉化為模糊量之后,就要確定模糊變量的隸屬度函數,考慮到本灌溉系統編程的簡明性和實用性,本設計選用三角形隸屬度函數對輸入輸出量進行模糊化處理,如式(3)所示。

(3)
輸入ET、EV和輸出U的隸屬度函數如圖8、圖9所示。

根據農業部長期對節水灌溉的實踐總結,可以得到模糊控制規則如表2所示。

表2 模糊控制規則
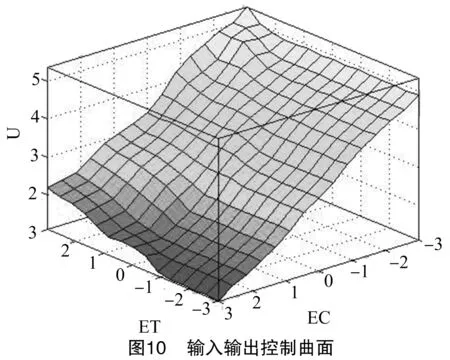
以第1條模糊控制規則為例,在這種雙輸入單輸出的模糊控制器中,控制規則應寫成“ifEC=NBandET=NBthenU=PB”的形式。在本系統中,采用Mamdani極小運算法進行模糊推理,采用隸屬函數最大原則求取各相應控制量,通過Matlab建立模糊控制器并仿真,得到的模糊控制如表3所示,三維控制曲面如圖10所示。
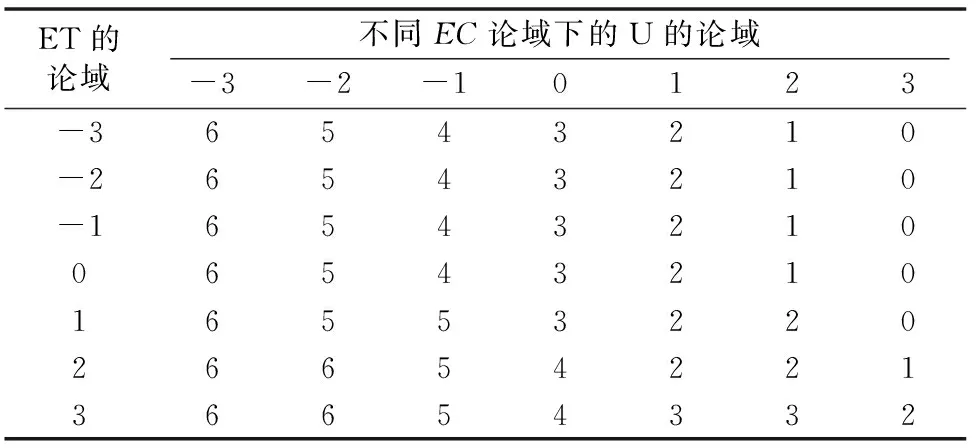
表3 模糊控制查詢
3 系統軟件設計
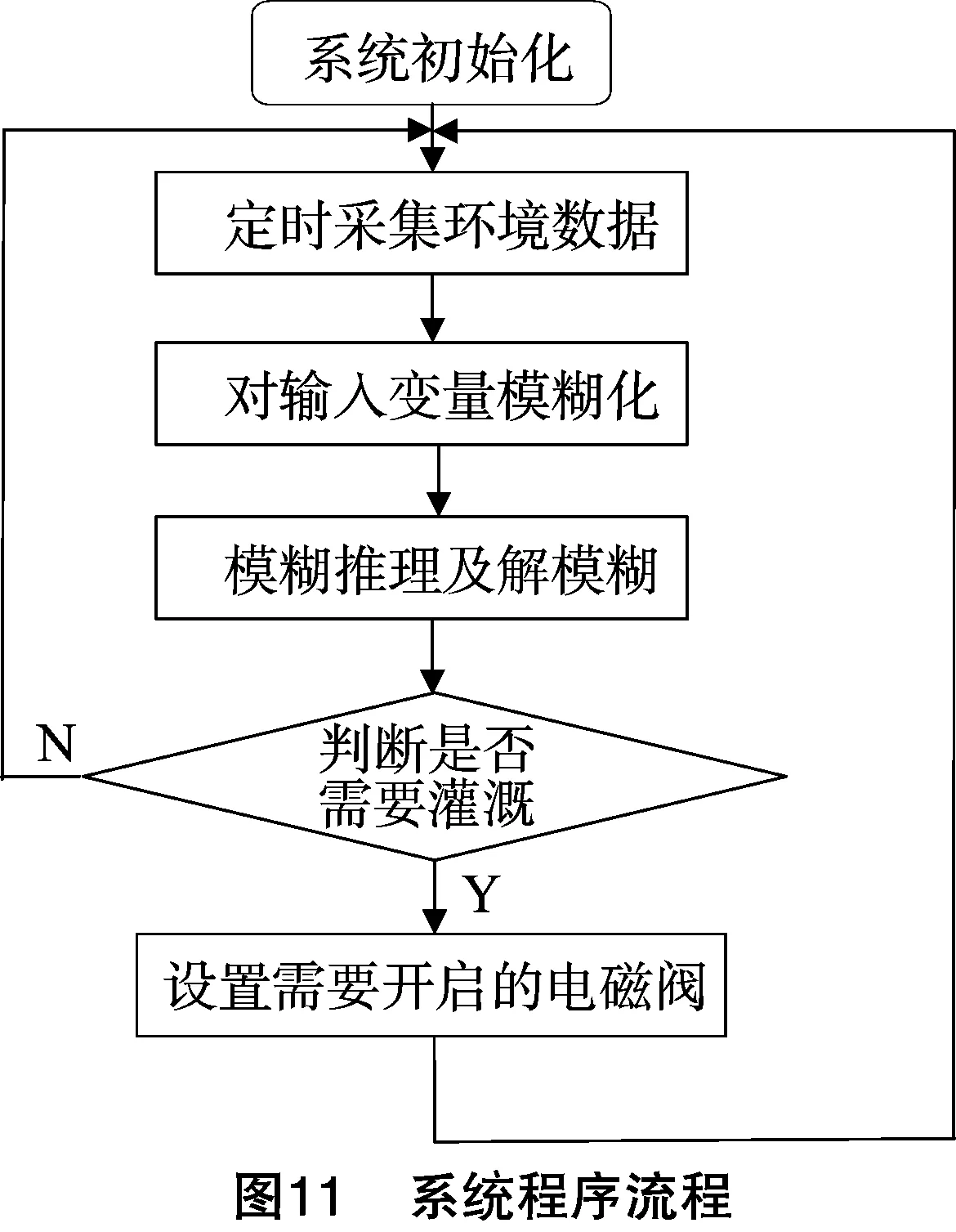
灌溉控制系統在運行時,首先對農田的環境信息進行采集,然后運用模糊控制推理出是否需要灌溉,若不需要灌溉則定時重復此程序;若需要灌溉則執行灌溉決策,程序流程如圖11所示。
4 結論與討論
本系統以C8051f340單片機為微處理器,通過有線和無線方式對農田環境參數進行采集,并與模糊控制相結合來獲取農作物需水量,實現農田的精準灌溉。通過初步試驗表明,該系統通信可靠,控制準確,運行良好。本研究設計電磁閥的無線控制方案,驗證射頻技術在農業無線電磁閥控制器上的可行性與可靠性。建立基于Penman-Monteith公式與模糊數學的多傳感數據融合方法,綜合考慮土壤水分含量和與農田騰發量相關的空氣溫濕度、風速、太陽輻射等因素的影響,能更加精確地確定作物需水量。如果該系統應用的地理環境或作物種類有所改變,只需修改系統的輸入輸出隸屬度函數,即可改變系統的性能,滿足不同對象的控制要求。在以后的研究中,該系統還須增加遠程通信模塊,實現對農田的遠程監控。