基于積分魯棒的電液伺服系統漸進控制
2019-02-25 02:09:42楊洋
微特電機 2019年1期
楊 洋
(南京航空航天大學,南京 210016)
0 引 言
針對電液控制系統中具有未知的動力學和有界擾動,許多方法相繼被提出[1],其中自適應控制方法是一種有效的方法[2]。但是傳統自適應控制的響應可能由于控制器高增益而失穩,不利于保證系統的安全[3]。文獻[4]提出了一種新的魯棒自適應控制,這種控制可保證系統收斂于穩態,同時也可以調節系統瞬態響應。文獻[5]采用光滑摩擦模型來適應未知的非線性,同時針對近似誤差和其它有界擾動,利用誤差項符號的積分魯棒方法來補償。通過實驗研究驗證所提出的控制方法的有效性和改進的控制性能[6]。
針對上述問題,本文采用光滑摩擦模型來適應未知的摩擦非線性,利用誤差項符號的積分魯棒方法來補償近似誤差和有界擾動,最后進行了仿真對比,仿真結果表明,積分魯棒控制方法的輸出性能得到有效改進。
1 問題提出
本文所考慮運動位置伺服系統如圖1所示,其中Ps為油源壓力,Pr為理想氣體壓力。

圖1 電液位置伺服系統示意圖
慣性負載的運動方程:
(1)
式中:J和θm分別為系統轉動慣量和輸出轉角;PL為負載壓力;Dm為電動機排量;fm為運動系統的摩擦;f(t)為不確定干擾。PL的動態方程可以表示[6]:
(2)
式中:Vt為控制容積;βe為有效彈性模量;Ct為泄漏系數。QL可表示如下[5]:
(3)
式中:kt為流量系數;sign(u)定義如下:

(4)
(5)

(6)
基于雙曲正切函數來近似適應摩擦模型可描述:
fm=θ1[tanh(c1x2)-tanh(c2x2)]+
θ2tanh(c3x2)+θ3x2
(7)
此靜態模型是關于速度的特性曲線,如圖2所示。取參數θ1=150,θ2=30,θ3=0,c1=200,c2=160,c3=200。
定義參數θ=[θ1,θ2,θ3]T,其相應的回歸器φ=[tanh(c1x2)-tanh(c2x2), tanh(c3x2),x2]T,則式(7)可參數線性化:
fm=φT(x2)θ
(8)
結合靜態摩擦模型式(7),則式(5)可化:
(9)
式中:θo是對常值參數θ的辨識估計。
為便于控制器設計,做如下假設:
假設 1 此時的系統為不確定性有界,即:
(10)
式中:ξN2,ξN3為已知界。
2 誤差符號積分魯棒控制器設計
定義如下的誤差變量:
(11)
式中:k1,k2,k3均為正的反饋增益;e1為跟蹤誤差。
將式(9)代入式(11)可得:
(12)
將式(12)代入式(11)可得:
(13)
由式(13),我們可設計魯棒控制器如下:
(14)
式中:kr>0為控制器增益;β>0為魯棒增益。
將式(14)代入式(13)可得:

(15)
對式(15)兩邊求微分可得:
(16)
3 穩定性證明
為了方便地分析魯棒控制器式(14)的潛在性能,引入如下的引理。
引理 1
定義:
L(t)=r[N-βsign(e3)]
(17)

(18)
若β滿足:
(19)
則輔助函數P(t)恒為正值。
證明:由式(17),對其兩邊同時取積分,可得:
因此有:
由式(19)及式(21)知:

(22)
由引理1可知:
(23)
基于引理1,我們有如下的性能定理。
定理 1 對于非線性系統式(9),若β滿足式(19),且如下矩陣Λ:
(24)
為正定矩陣時,則t→∞時,e→0,其中e定義為e=[e1,e2,e3,r]T,并且可由誤差符號積分控制器魯棒項μ辨識系統的真實摩擦力,即:
(25)
證明:定義如下函數:
(26)
由式(12)及式(16)知:
又由式(24)定義的矩陣Λ正定知:
(28)

(29)
由定理1可知,只要魯棒增益β值取得足夠大,我們就可以獲得較好的摩擦補償效果。
4 仿真對比
文獻[5]中電液系統具體參數如表1所示。

表1 電液系統參數
系統跟蹤信號x1d(t)=0.2sin(πt)[1-exp(-0.01t3)]。為了便于對比,本文采用積分魯棒控制器(以下簡稱ARIPC)方法、誤差符號積分控制器(以下簡稱RISE)方法以及反饋線性化控制器(以下簡稱FLC)進行仿真對比。三種控制器的參數選取如下:
1)誤差符號積分魯棒控制器(ARIPC):取控制器參數k1=250,k2=20,kr=2,β=2,自適應增益Г=diag{100, 50, 50, 50}。
2)誤差符號積分控制器(RISE):即所設計的RISE控制器中不含模型補償部分。為保證對比公平性,其控制器參數與ARIPC控制器中對應的參數相同。
3) 反饋線性化控制器(FLC):參照文獻[5]設計控制器如下:
式中:k1=5×104,k2=2×103,k3=200,χ=1。
圖3是系統在ARIPC控制輸入信號。ARIPC下系統對期望指令的跟蹤曲線、三種控制器作用下的跟蹤誤差分別如圖4,圖5所示。由圖5可知,ARIPC控制器的暫態和穩態跟蹤性能都要優于相對比的RISE控制器和FLC控制器,RISE控制器由于缺少模型補償,獲得較差的跟蹤性能,而FLC控制器既沒有自適應模型補償,也沒有非線性魯棒反饋則作用,獲得最差的跟蹤性能。

圖3 ARIPC控制輸入信號
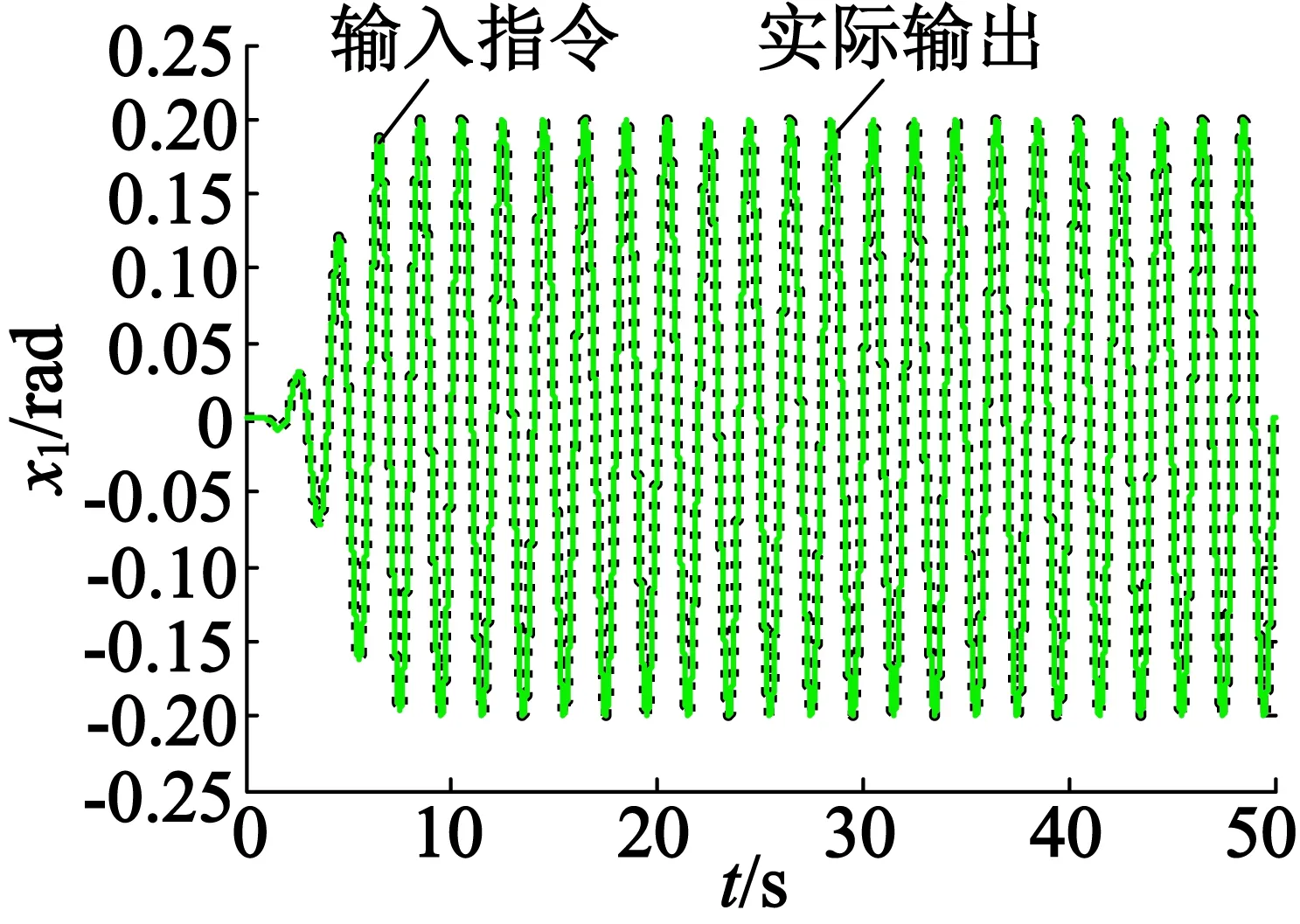
圖4 ARIPC下系統實際輸出曲線

圖5 系統跟蹤誤差曲線
5 結 語
本文針對電液位置伺服系統,采用光滑摩擦模型來適應未知的摩擦非線性,利用誤差項符號的積分魯棒方法來補償近似誤差和有界擾動。仿真結果表明,對比FLC和非線性RISE補償控制器,基于ARIPC的補償策略具有改進的輸出性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19