基于霍爾和鎖相環的改進型PMSM轉子位置估計
2019-03-29 03:15:22蔣新柱
微特電機 2019年3期
關鍵詞:方法
蔣新柱,翟 涌
(北京理工大學,北京 100081)
0 引 言
永磁同步電動機(以下簡稱PMSM)因其效率高、功率密度大、運行可靠等優點,被廣泛應用于電動汽車的驅動系統中。在電動汽車用PMSM的控制中,準確地獲取轉子位置是實現精確控制的必要條件。轉子位置估計方法可分為無位置傳感器和有位置傳感器兩大類。無位置傳感器方法需要通過相應的算法檢測轉子的位置與速度[1],易受電機參數和測量限制的影響,無法精確控制轉矩、保證轉矩的響應速度[2-5],其中有的方法還會導致額外的損耗與振動[6-8]。所以無位置傳感器方法并不適用于電動汽車這種要求扭矩響應快且負載變化劇烈的工況。在有位置傳感器的方法中,旋轉變壓器與編碼器[9]雖然精度較高,但是增加了電機的成本與質量。所以,成本低、體積小、質量輕的霍爾傳感器被廣泛應用于車用PMSM的控制中。
由于霍爾傳感器在一個電周期中僅有6個位置信號,將電周期平分為6個扇區,其精度為π/3,所以基于霍爾位置傳感器的轉子位置準確獲取是目前國內外研究的熱門領域。文獻[10-11]利用平均轉速法來估計轉子位置,并在霍爾區間的邊界進行了角度校正,消除了累積誤差,但是在速度變化時將無法準確獲取位置信息;文獻[12]提出了平均加速度法,有效補償了平均速度法的誤差,但在實際使用中難以較好地實現轉速閉環控制[13]。文獻[14-15]在電機機械方程的基礎上,建立了矢量跟蹤觀測器,對轉子位置進行跟蹤,并用傅里葉變換消除了諧波成分,但是該方法用到了機械參數,當車輛換擋和上下坡時,其效果將會受到影響。
本文研究了一種基于霍爾傳感器和鎖相環的改進型PMSM轉子位置估計方法。該方法利用相位跟蹤器對電機反電動勢的相位進行跟蹤,并將霍爾傳感器計算出的速度信號作為相位跟蹤器的前饋,以提高響應的速度與電機低速時的估計精度。在電機低速或起動時,反電動勢較小或沒有,會影響跟蹤精度,這時霍爾信號作為前饋在閉環反饋的作用下,可以保證獲得準確的轉子位置。由于電機在運行過程中定子參數的變化、氣隙的不均勻和傳感器的誤差等原因,往往會導致估算出的反電動勢不對稱,如果相位跟蹤器采用常規同步參考系鎖相環(以下簡稱SRF-PLL),則會導致相位跟蹤上的誤差,所以這里采用解耦雙同步參考系鎖相環(以下簡稱DDSRF-PLL)作為相位跟蹤器對相位進行跟蹤。最后,利用一臺15 kW的PMSM進行實驗驗證,并與插值法進行對比,實驗結果證明該方法可以準確穩定地獲得轉子位置。
1 反電動勢估計
利用電機的電壓方程估計反電動勢,在α,β坐標系下電壓方程如下:
(1)
由式(1)可計算出磁鏈:
(2)
對定子繞組感應電動勢進行積分得到磁鏈在α,β坐標系分量。由式(2)可以看出,在計算轉子磁鏈時有積分項,直接積分容易累積誤差,導致最后計算出的結果嚴重偏離真實值。在積分器前加入一階高通濾波,可以串聯成為一階低通濾波器[16],在積分的同時,消除了直流分量帶來的誤差。圖1示出了該方法求取反電動勢的計算框圖。
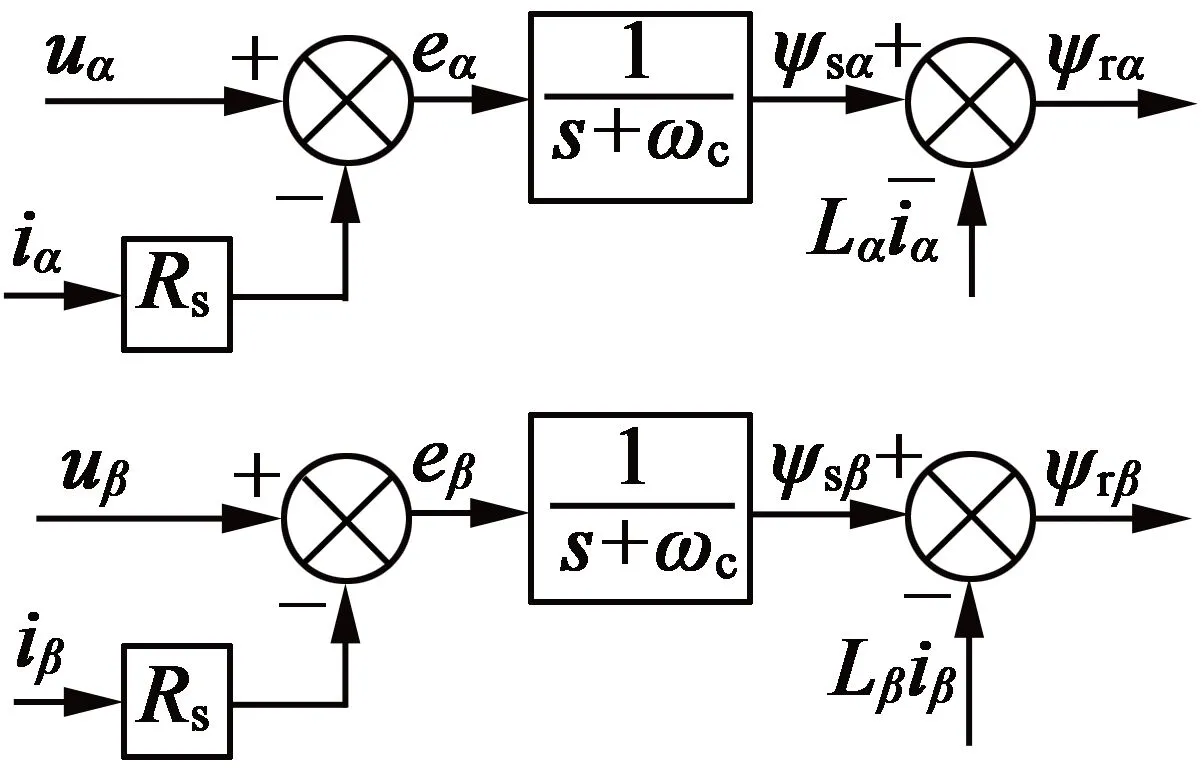
圖1 基于一階低通濾波器的轉子磁鏈計算框圖
2 相位跟蹤器設計
根據上節內容可計算出電機反電動勢在α,β坐標系下的分量ψrα,ψrβ,則電機的角度θr=arctan(ψrβ/ψrα),可以用SRF- PLL進行相位跟蹤[17]。但是在實際運行中,因為電機參數的變化、氣隙不均勻和傳感器的誤差等原因,會導致計算出的反電動勢不對稱。圖2是單片機根據上節方法估算出的反電動勢,此時如果采用SRF-PLL對其進行相位跟蹤,則會出現跟蹤誤差,如圖3所示[18],跟蹤過程中出現了相位變形。
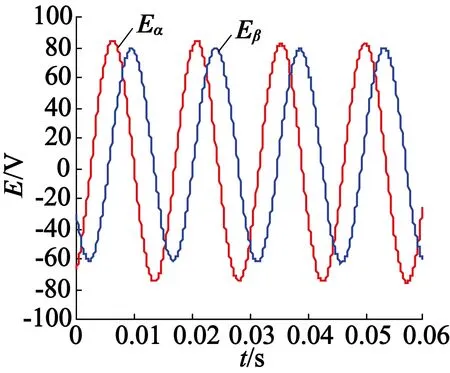
圖2 估算的反電動勢波形
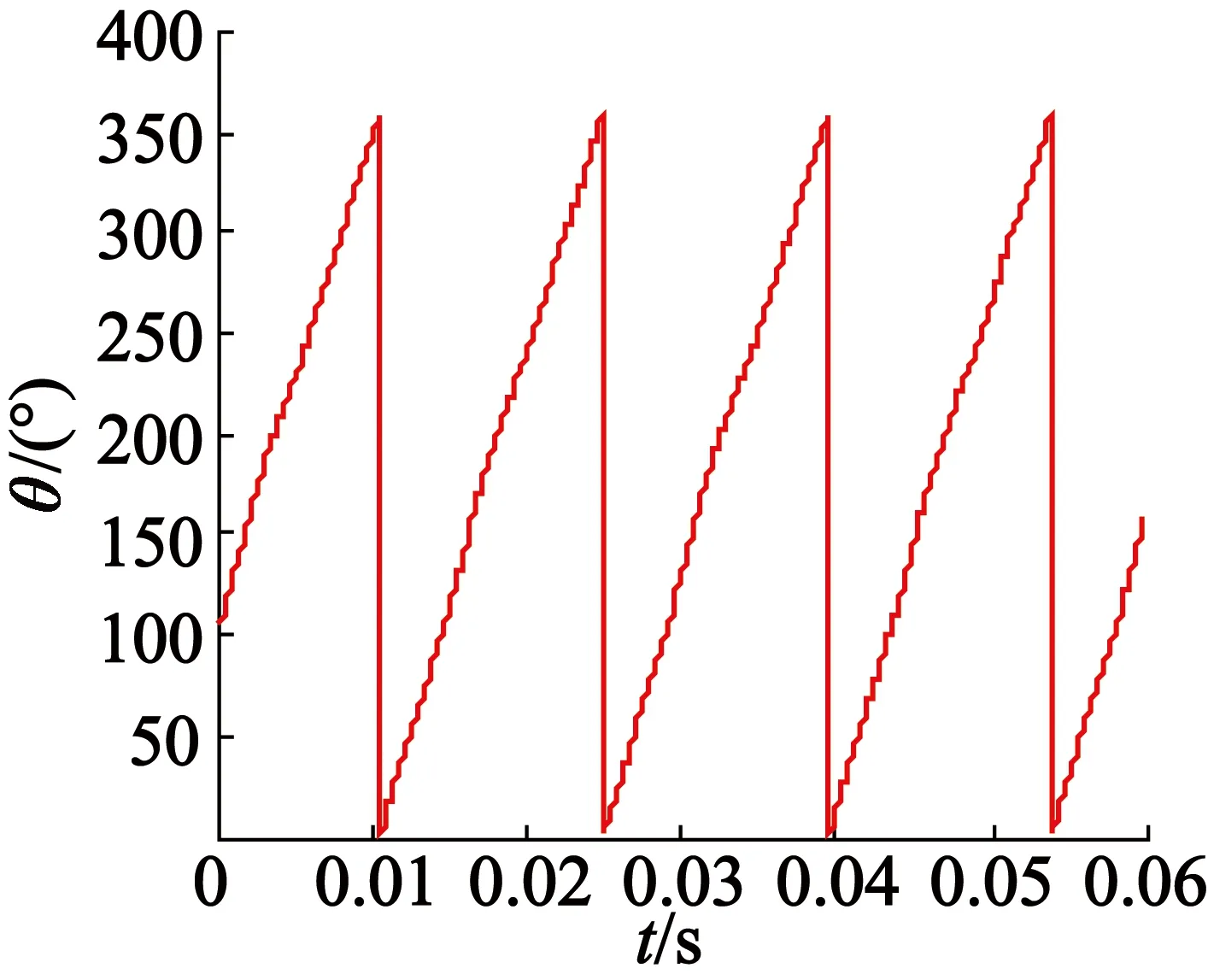
圖3 SRF-PLL跟蹤角度

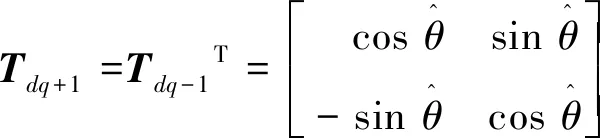
圖4 電壓矢量在雙Park變換下的矢量分解圖

(3)
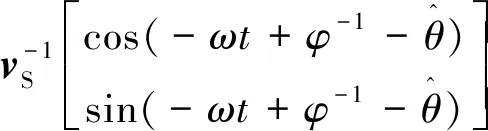


上述假設條件代入式(4)和式(5)中并化簡,求出正負序分量的值:


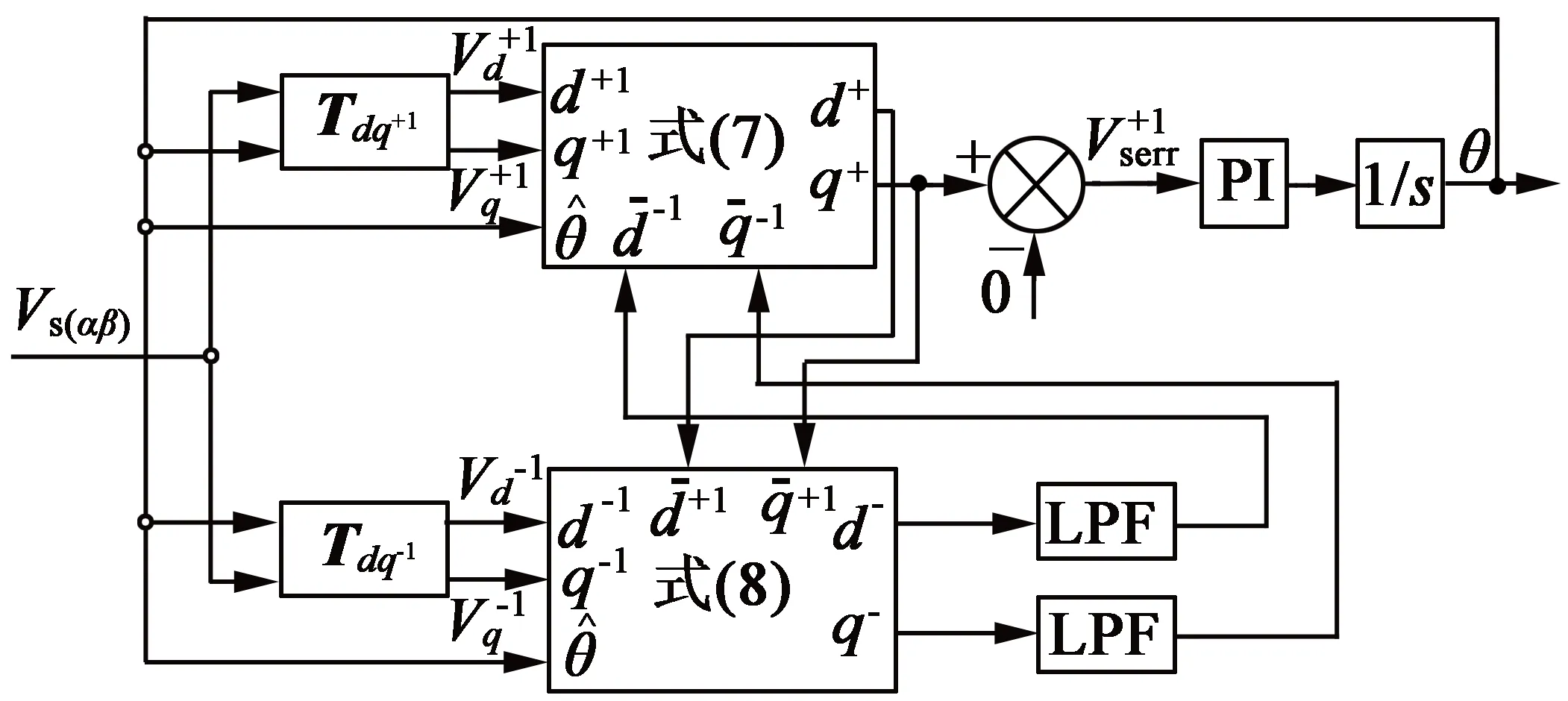
圖5 DDSRF-PLL框圖
3 霍爾前饋
為了提高相位跟蹤器的跟蹤速度,將霍爾信號作為相位跟蹤器的前饋,這樣保證了相位跟蹤器在電機起動和低速時可以準確地獲取轉子位置。因為電機低速和起動時,反電動勢的幅值很小或為零,這時相位跟蹤器主要受霍爾前饋的影響,在閉環反饋的作用下,其輸出結果的連續性將好于插值法。整個相位跟蹤器的結構如圖6所示。由傳感器測量出uαβ,iαβ,由第一節內容可估算出反電動勢ψrαβ。然后由DDSRF-PLL對反電動勢的基波相位進行跟蹤,并利用霍爾信號的前饋,加快了響應速度,提高了相位跟蹤器在電機起動和低速時的性能。
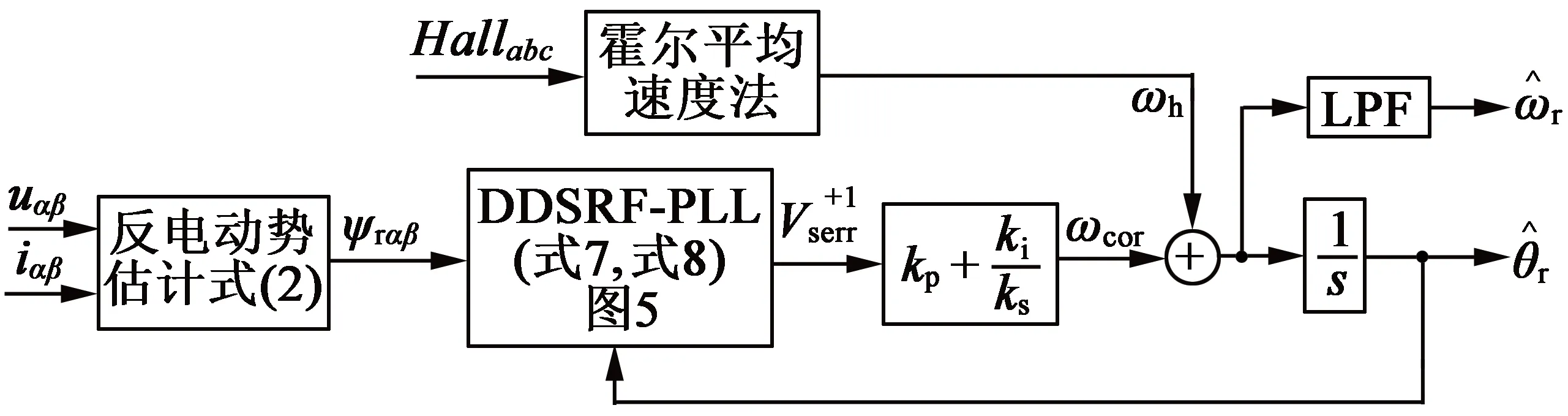
圖6 轉子位置估計算法框圖
4 實驗驗證
依據本文的轉子位置估計方法,使用DSP芯片MC56F84789為核心控制器,嵌入算法進行實驗驗證。PMSM參數如表1所示。測試電機與控制如圖7所示。

表1 測試電機參數

(a) 電機

(b) 控制器
4.1 有無載荷工況下的對比
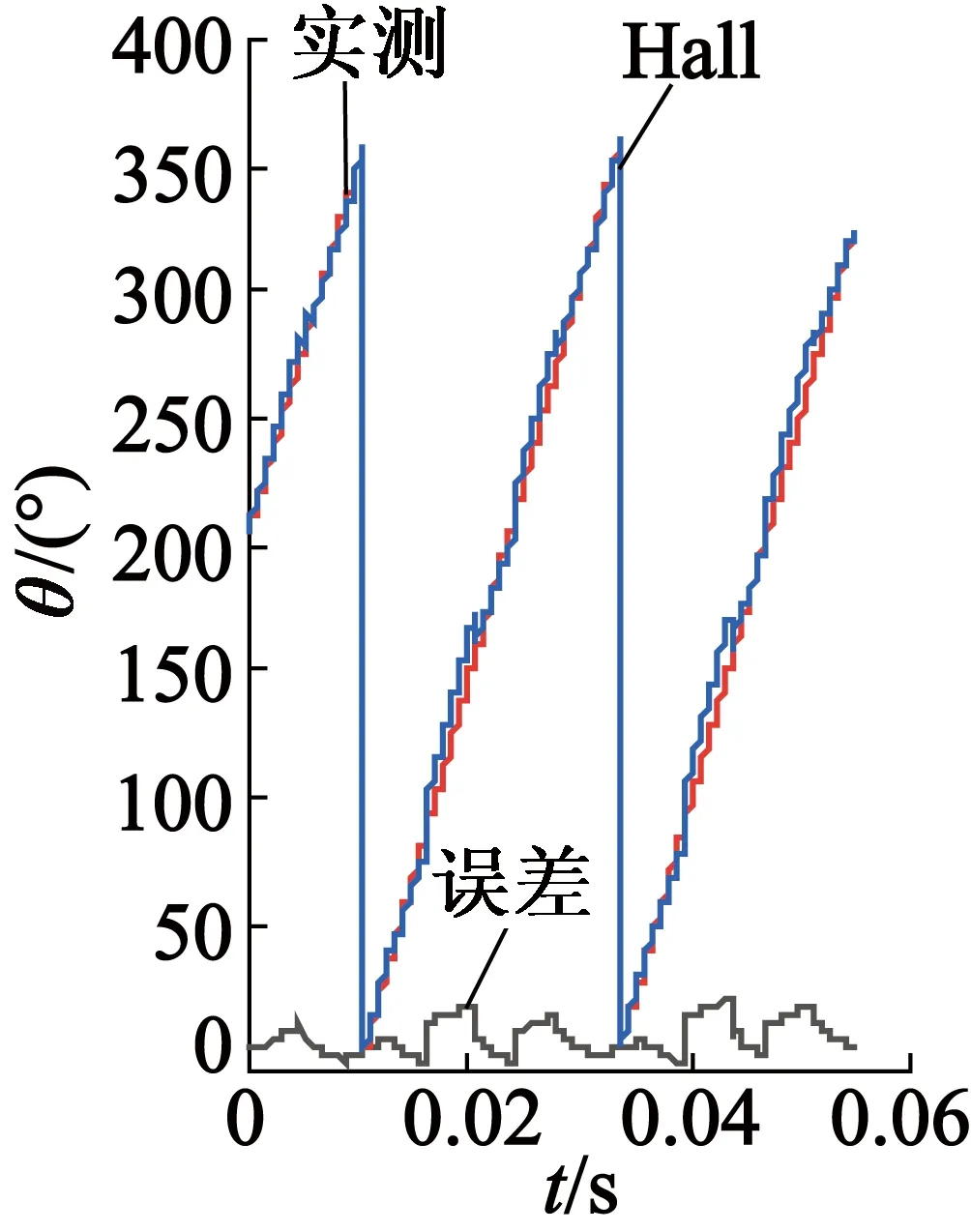
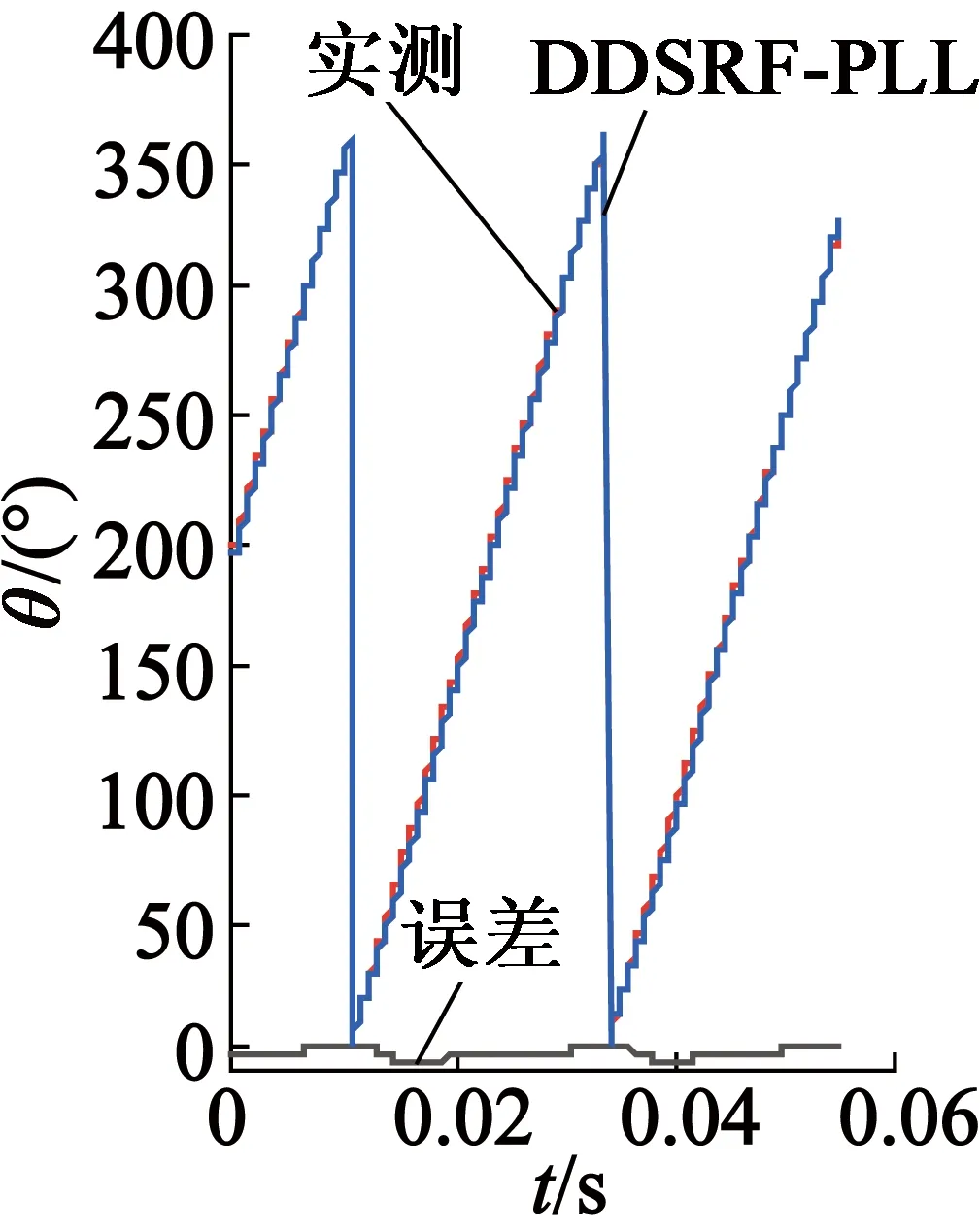
實驗時,將插值法與本文的采用DDSRF-PLL的轉子位置估計方法進行對比,插值法采用平均速度法。分別在500 r/min,空載和10 N·m的工況下進行驗證。圖8為電機空載時的轉子位置對比圖,表2為轉子位置誤差分析對照表。

(a) 插值法

(b)DDSRF-PPL

估計方法誤差最大值lmax/(°)平均值e-/(°)標準差ef/(°)插值法15.25.513.83DDSEF-PLL5.11.481.26
由圖8可知,簡單的插值法會導致轉子位置的跳變,尤其在霍爾扇區邊界進行校正時。如表2所示,其最大偏差高達15°左右,平均誤差為5.51°,誤差的標準差高達3.83°。與插值法相比,本文的方法可以更精確地獲取轉子位置,最大偏差為5°左右,平均誤差為1.48°,誤差的標準差為1.26。加載10 N·m時,在500 r/min下驗證結果如圖9和表3所示。
由圖9和表3可知,在加載時,插值法獲取的轉子位置進一步惡化,本文的方法獲取的轉子位置依舊平滑穩定。
(a) 插值法
(b)DDSRF-PPL

估計方法誤差最大值emax/(°)平均值e-/(°)標準差ef/(°)插值法19.716.095.45DDSRF-PLL5.21.981.59
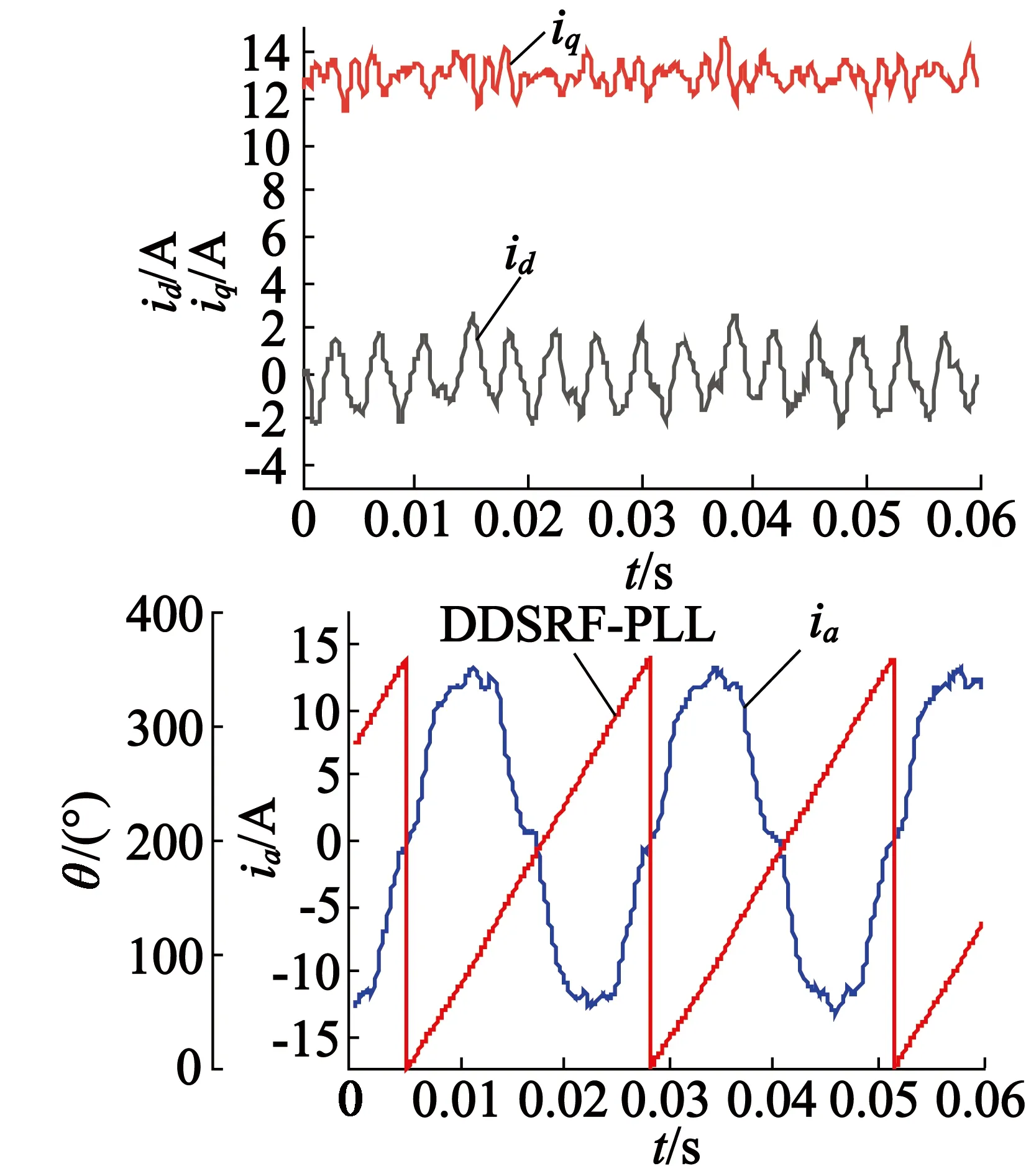
4.2 電流特性的對比
對比分析d,q軸電流和A相電流在不同轉子位置控制下的差別。圖10(a)是用插值法獲得的轉子位置對電機的控制,工況為速度500r/min,載荷20N·m。由圖10可見,d,q軸電流振蕩明顯,A相的相電流畸變嚴重。圖10(b)為采用本文方法,相較于插值法,d,q軸電流振蕩明顯較小,尤其是d軸電流,振幅由原來的5 A降到2 A,A相的相電流更加平滑,總諧波失真從34.5%降為17.3%。

(a) 插值法
(b)DDSEF-PPL
4.3 采用不同鎖相環時的對比
最后對比了采用DDSRF -PLL的相位跟蹤器與采用SRF-PLL的相位跟蹤器的跟蹤結果,在速度500 r/min,載荷10 N·m的工況下,結果如圖11所示。使用SRF-PLL的方法獲取的角度在開始時發生了偏差,這是由于電機控制器的主控芯片在經過采樣、計算和濾波后,計算出的反電動勢幅值不對稱,SRF-PLL僅簡單地對相位進行跟蹤,沒有消除負序分量的影響,導致跟蹤結果失真,這種情況在實際應用中很難避免。而使用DDSRF-PLL則可以消除負序分量的干擾,較好地跟蹤反電動勢的基波相位。

圖11 不同鎖相環跟蹤效果的轉子位置估算對比(500 r/min,10 N·m)
5 結 語
本文設計了一種基于霍爾位置傳感器和鎖相環的改進型PMSM轉子位置估計方法,利用定子電壓方程估算出反電動勢,將霍爾信號作為前饋量輸入到相位跟蹤器中,提高了電機低速和起動性能。使用DDSRF跟蹤反電動勢的相位,可在輸入信號幅值不對稱的情況獲取基波相位,增加了該方法的適應能力。
實驗結果表明,本文方法與插值法相比,轉子位置的精度提高了5.47%,平均誤差縮小29.6%,方差縮小為10%。該方法能精確平滑地獲取轉子位置,消除了插值法計算轉子位置時的跳動。由于轉子獲取的轉子位置更精確穩定,電流的控制精度也得到改善,d軸電流振幅縮小將近50%,相電流的總諧波失真降為原來的50.3%。
該方法利用反電動勢與霍爾信號計算出轉子位置,與機械參數無關,在車輛換擋時不受影響,更適用于車輛驅動系統。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56