基于線性正弦跟蹤算法的PMSM無位置傳感器研究
2019-03-29 03:30:00何繼愛李婕妤
微特電機(jī) 2019年3期
關(guān)鍵詞:信號
何繼愛,郁 琪,李婕妤,馬 云
(1.蘭州理工大學(xué), 蘭州 730000;2.中山市普陽電子科技有限公司,中山 528400)
0 引 言
內(nèi)置式永磁同步電機(jī)(以下簡稱IPMSM)具有高功率密度、高效率等優(yōu)點,在工業(yè)領(lǐng)域扮演重要角色[1]。在采用磁場定向矢量控制時,為了實現(xiàn)高性能的三相永磁同步電機(jī)控制系統(tǒng),一般都需要獲取準(zhǔn)確的轉(zhuǎn)子位置及轉(zhuǎn)速信息,但機(jī)械傳感器的安裝使用會增加成本,占用空間,并對使用環(huán)境有比較嚴(yán)格的要求[2-3]。高頻信號注入法的基本思想是把一個高頻電壓(電流)信號疊加到基波信號上,相應(yīng)的高頻電流(電壓)信號中將攜帶轉(zhuǎn)子位置信息,通過適當(dāng)?shù)男盘柼幚砭湍芄烙嫵鲛D(zhuǎn)子的位置[4-5]。
目前,常用的注入高頻信號主要有旋轉(zhuǎn)高頻電壓信號[6]和脈振高頻電壓信號[7]。脈振電壓信號注入法可以用于凸極率很小甚至表貼式永磁同步電機(jī)轉(zhuǎn)子位置檢測,但是轉(zhuǎn)子位置信息提取的快速性和準(zhǔn)確性對高頻注入法位置跟蹤性能有極大的影響。文獻(xiàn)[8-9]設(shè)計了基于鎖相環(huán)(PLL)的轉(zhuǎn)子位置跟蹤方法,并將PI調(diào)節(jié)器和其串聯(lián)構(gòu)成PLL系統(tǒng),可以快速準(zhǔn)確地跟蹤轉(zhuǎn)子位置。文獻(xiàn)[10]采用基于跟蹤觀測器的轉(zhuǎn)子位置估計方法,對轉(zhuǎn)子位置實現(xiàn)了較好的跟蹤。以上方法雖然可以實現(xiàn)轉(zhuǎn)子位置的快速跟蹤,但是為了獲得角度誤差,要預(yù)先對高頻響應(yīng)電流進(jìn)行幅值調(diào)制和低通濾波處理,增加了運算量。
本文基于脈振高頻電壓信號注入法,對IPMSM模型進(jìn)行研究分析,將電力系統(tǒng)中對電信號的分析方法線性正弦跟蹤(LST)算法[11]引用到轉(zhuǎn)子位置跟蹤中,設(shè)計了LST位置跟蹤器,不需要對高頻響應(yīng)電流進(jìn)行幅值調(diào)制和低通濾波,就可以直接提取轉(zhuǎn)子角度誤差,從而實現(xiàn)永磁同步電機(jī)的無位置傳感器控制。
1 脈振高頻電壓信號注入法的原理
1.1 永磁同步電機(jī)數(shù)學(xué)模型
內(nèi)置式三相永磁同步電機(jī)在旋轉(zhuǎn)坐標(biāo)系下的電壓方程:
(1)
定子磁鏈方程:
(2)
將式(2)代入式(1),電壓方程可變成:
(3)
式中:ud,uq分別是定子電壓的d,q軸分量;id,iq分別是定子電流的d,q軸分量;R是定子電阻;ωe是電角速度;Ld,Lq分別是d,q軸的電感分量;ψf代表永磁體磁鏈。
轉(zhuǎn)矩方程:
(4)
式中:Te為電磁轉(zhuǎn)矩;p為電機(jī)極對數(shù)。
1.2 脈振高頻電壓激勵下的永磁同步電動機(jī)電流響應(yīng)
當(dāng)電機(jī)運行于低速區(qū)且注入信號頻率遠(yuǎn)高于電機(jī)運行頻率時,永磁同步電機(jī)可以近似等效為純電感模型。此時式(3)可以簡化:
(5)
式中:udh,uqh為d,q坐標(biāo)系定子高頻電壓分量;idh,iqh為d,q坐標(biāo)系定子高頻電流分量;Ldh,Lqh為d,q坐標(biāo)系定子高頻電感。


圖1 幾種坐標(biāo)系間關(guān)系

(6)

式中:
(8)

(9)

(10)

(11)
式中:uin為高頻電壓信號的幅值;ωin為高頻電壓信號的頻率。
此時,式(10)可以簡化:
(12)
將q軸高頻響應(yīng)電流單獨列寫如下:
(13)
2 線性正弦跟蹤算法
2.1 線性正弦跟蹤的原理
線性正弦跟蹤(以下簡稱LST)算法可以實現(xiàn)對正弦信號幅值和相位的估計,根據(jù)最小方差原則和梯度下降法,再經(jīng)過旋轉(zhuǎn)變化,得到線性常微分方程,從而設(shè)計線性正弦跟蹤器。當(dāng)輸入正弦信號的角頻率等于濾波器的頻率參數(shù),則濾波器輸出能夠?qū)崿F(xiàn)對輸入的無幅值誤差、無相位誤差跟隨[10]。目前,LST算法主要應(yīng)用于電力系統(tǒng)中對電信號的分析。
假設(shè)已知頻率為ωo的單個正弦信號表達(dá)式:
u(t)=Usin(ωot+δo) (-π≤δo≤π) (14)

(15)
把式(14)展開得到:
u(t)=Ucosδosin(ωot)+Usinδocos(ωot)(16)
(17)
幅值的估計值a(t):
(18)
信號的估計誤差e(t):

(19)
根據(jù)最小均方誤差思想,定義代價函數(shù):
根據(jù)以上分析可以看出,流域內(nèi)大部分區(qū)域作物都存在不同程度作物缺水情況,但是不同分區(qū)缺水的原因也有所區(qū)別。
(20)
采用隨機(jī)梯度下降法,并且每個狀態(tài)的變化方向為J(y)對該狀態(tài)的梯度的負(fù)方向:
(21)
μ為矩陣,調(diào)節(jié)y(t)收斂到最優(yōu)值的速度以及算法的穩(wěn)定性。令μ1>μ2>0,選擇:
(22)
得到周期系數(shù)線性動力系統(tǒng):

y(t)做旋轉(zhuǎn)變換,令:
(24)
代入式(23)可得:
(25)

(26)

(27)

由式(28)可以對信號的幅值進(jìn)行計算跟蹤。
2.2 LST算法的穩(wěn)定性證明

(30)
對式(30)進(jìn)行Laplace變換,有:

對式(31)進(jìn)行Laplace逆變換,有三種情況:
(1)當(dāng)μ=2η時,有:




3 仿真與分析
由LST算法直接跟蹤式(13)的高頻響應(yīng)電流的幅值變化,提取角度誤差值Δθe,并將其調(diào)節(jié)至0,那么Δθ也將為0,此時轉(zhuǎn)子位置的估計值收斂到轉(zhuǎn)子位置實際值。基于LST算法的脈振高頻電壓信號注入法原理,如圖2所示,其中T3s/2s表示三相坐標(biāo)系轉(zhuǎn)換到靜止坐標(biāo)的變換矩陣;T(θe)表示靜止坐標(biāo)系轉(zhuǎn)換為旋轉(zhuǎn)坐標(biāo)系的變換矩陣;T-1(θe)為旋轉(zhuǎn)坐標(biāo)系轉(zhuǎn)換為靜止坐標(biāo)系的變換矩陣。
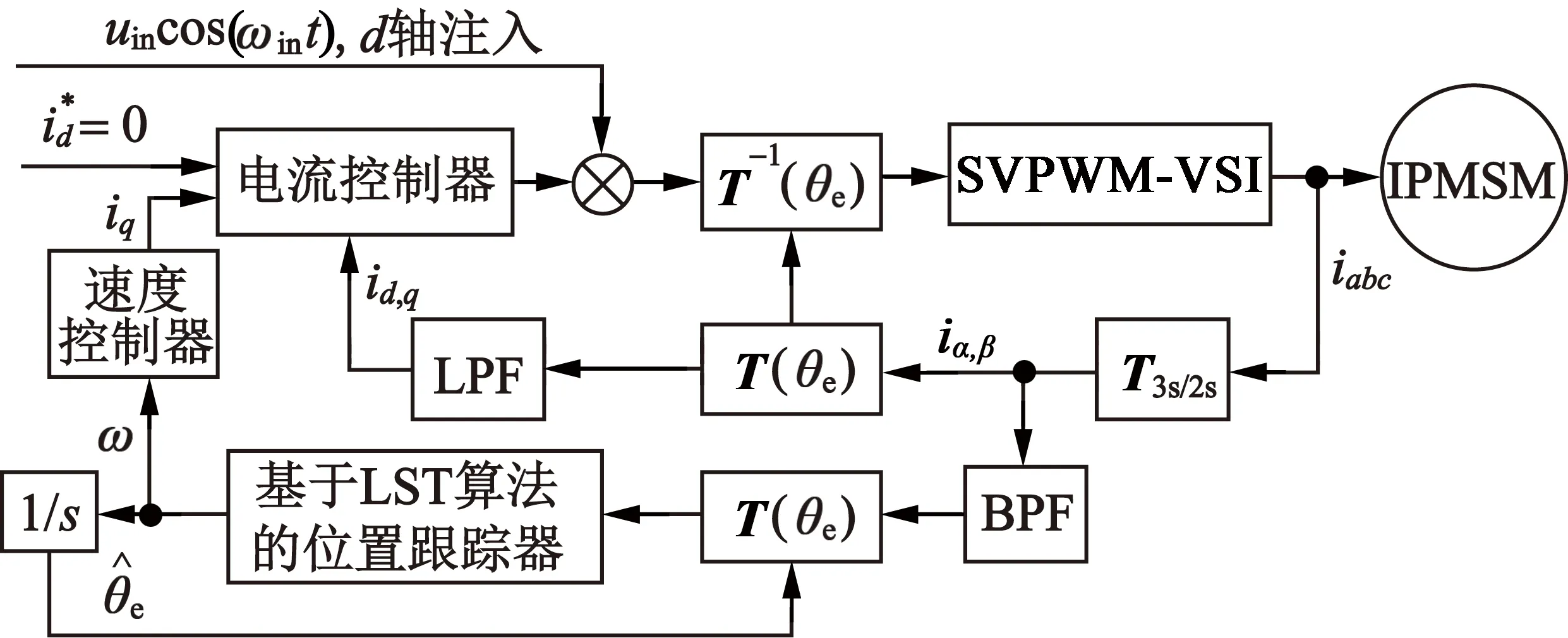
圖2 基于LST算法的脈振高頻電壓信號注入法原理框圖
為了驗證該方法的可行性,在MATLAB/Simulink環(huán)境下搭建系統(tǒng)仿真模型,電機(jī)仿真參數(shù)如表1所示。脈振高頻電壓信號的幅值uin=20 V,頻率ωin=1 000 Hz,低通濾波器(LPF)的設(shè)計采用巴特沃斯方法,階數(shù)為1,通帶頻率為150 Hz。帶通濾波器(BPF)的設(shè)計采用巴特沃斯方法,階數(shù)為2,低通帶邊緣頻率為987 Hz,高通帶邊緣頻率為1 018 Hz。仿真條件:采用變步長ode45算法,相對誤差為0.001,仿真時間為1 s。

表1 電機(jī)仿真參數(shù)
在參考轉(zhuǎn)速為100 r/min的空載運行下,圖3為轉(zhuǎn)子位置估計和實際值的對比圖,從圖3可以看出,估計值和實際值基本吻合。圖4為位置估計誤差,由圖4可以看出估計誤差小于1°(1 rad≈57.3°),表明估計轉(zhuǎn)子位置能夠?qū)崟r反映轉(zhuǎn)子的實際位置。

圖3 轉(zhuǎn)子位置對比圖
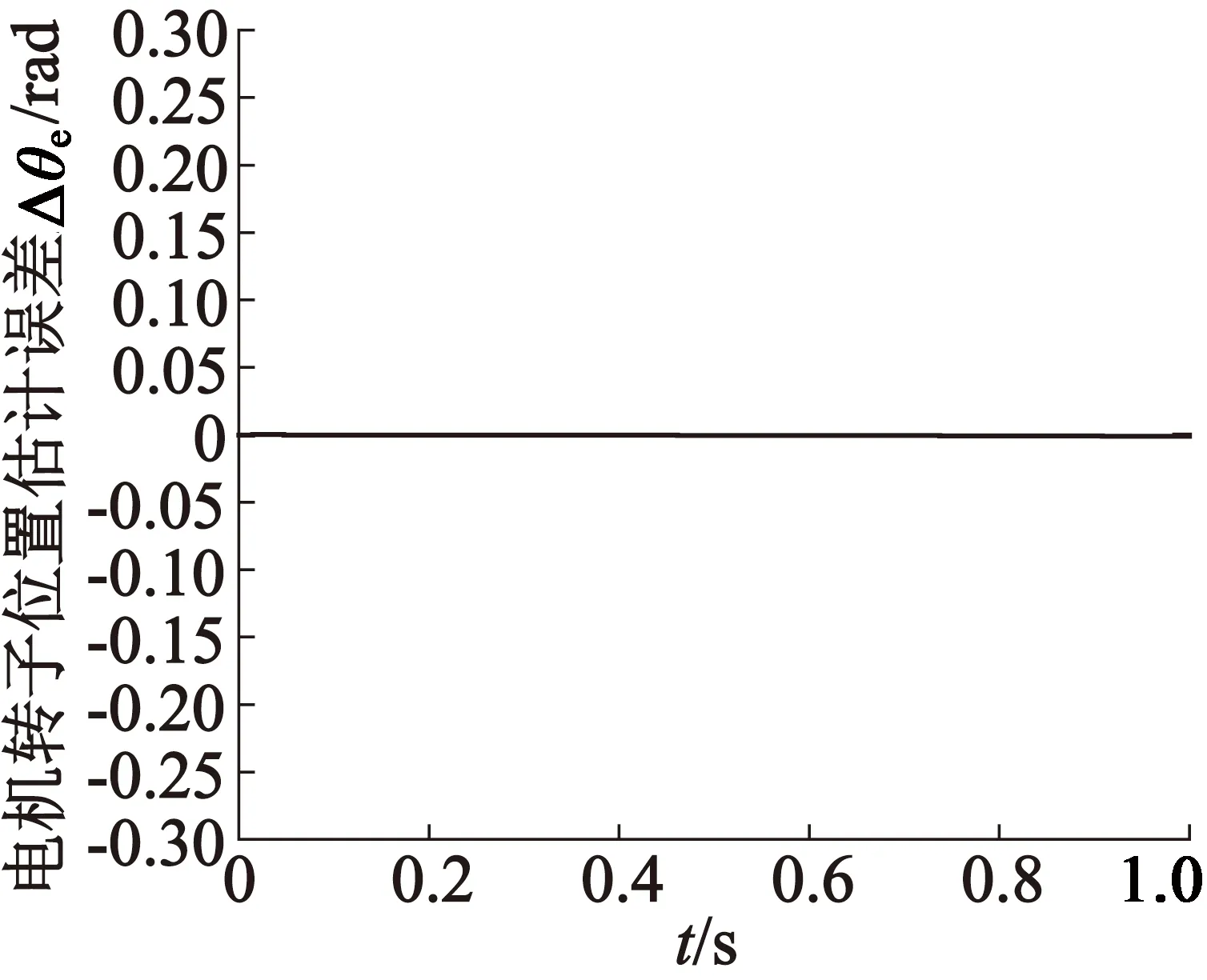
圖4 位置估計誤差
圖5為電機(jī)轉(zhuǎn)速估計值與實際值的對比圖,從圖5中可以看出,估計轉(zhuǎn)速響應(yīng)速度快,超調(diào)小,較快地穩(wěn)定在額定轉(zhuǎn)速值。圖6為轉(zhuǎn)速估計誤差,由圖6可以看出,在開始階段,轉(zhuǎn)速估計誤差較大,穩(wěn)定之后,在轉(zhuǎn)速100 r/min時估計誤差可以控制在0.02 r/min的范圍內(nèi),說明估計轉(zhuǎn)速可以真實地反映實際轉(zhuǎn)速值,可用于電機(jī)的無位置傳感器控制。

圖5 電機(jī)轉(zhuǎn)速對比圖
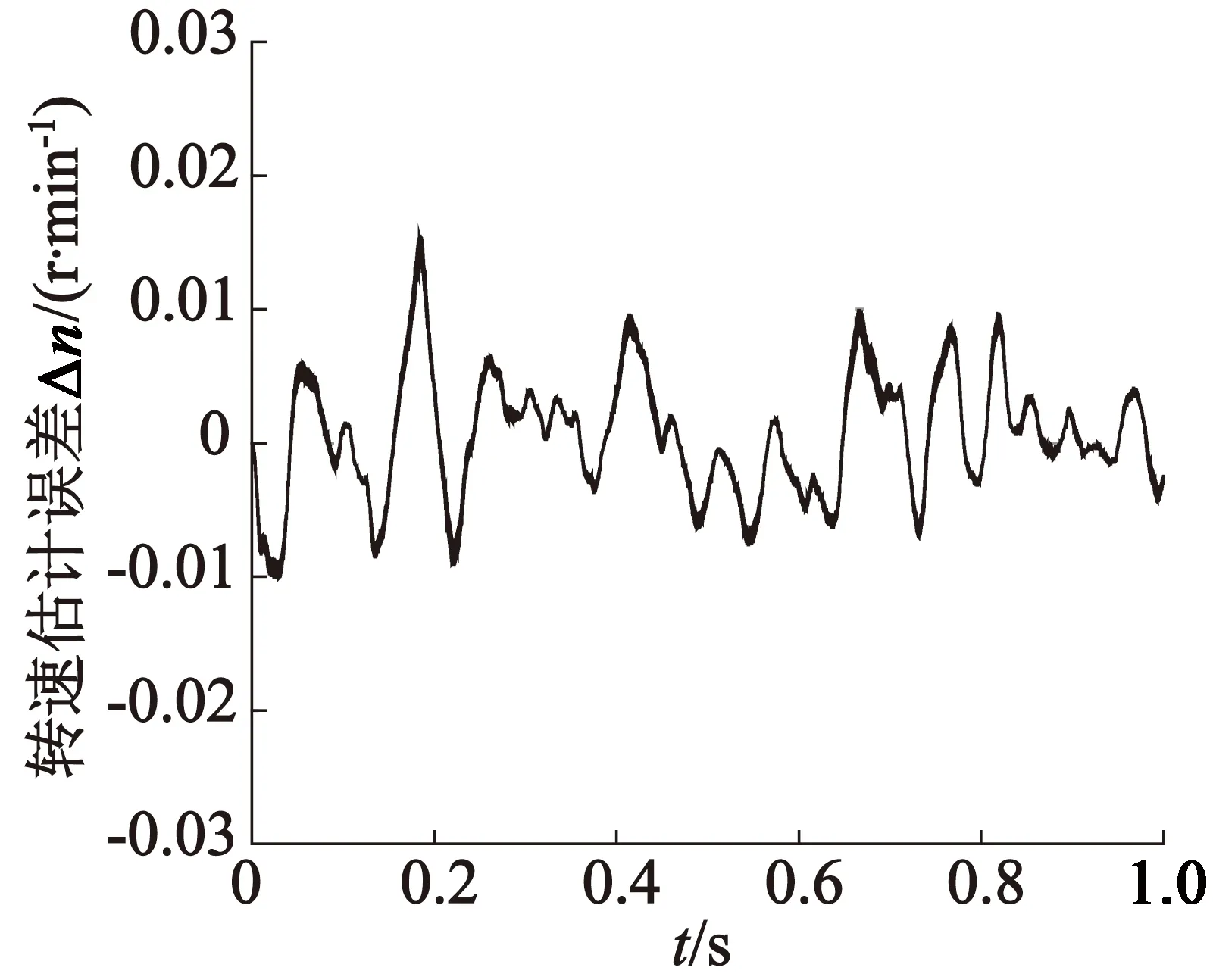
圖6 轉(zhuǎn)速估計誤差
4 結(jié) 語
本文對脈振高頻電壓信號注入法在永磁同步電機(jī)無位置傳感器控制的應(yīng)用進(jìn)行了研究分析,將電力系統(tǒng)中對電信號的分析方法——LST算法運用到電機(jī)控制系統(tǒng),簡化系統(tǒng)結(jié)構(gòu),提高系統(tǒng)性能,實現(xiàn)了轉(zhuǎn)子誤差角度的快速準(zhǔn)確提取,并通過仿真驗證了該方法的有效性,為永磁同步電機(jī)無位置傳感器控制提供了一種新的途徑。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06