表貼式PMSM轉子初始位置非線性估計
2019-03-29 03:29:40雷學國蔣學程
微特電機 2019年3期
關鍵詞:信號
雷學國,蔣學程
(1. 福建萬潤新能源科技有限公司,福州350108; 2. 閩江學院,福州 350108)
0 引 言
增量式光電編碼器或無位置傳感器永磁同步電動機(以下簡稱PMSM)在起動控制階段無法確定PMSM轉子初始位置,需要通過算法觀測電機轉子初始位置,保證PMSM正常起動和運行。
內置式PMSM具有凸極性,許多學者基于電機基波模型提出了擴展卡爾曼濾波法[1]、狀態觀測器法[2]等實現轉子初始位置檢測。旋轉高頻電壓注入[3]是通過注入固定幅值的旋轉高頻電壓信號,利用旋轉坐標系變換以及低通和帶通濾波等方法解析電流信號,獲取轉子位置信息[4]。Boussak M等[5-6]使用Clarke變換和擴展卡爾濾波器,解析靜止兩相坐標系電流信號中的轉子位置信息,通過三角恒等式估計轉子位置。文獻[7]通過離散傅里葉解析電機電流信號的直流分量,并采用積分估計器估計轉子位置。但旋轉高頻電壓注入法適用于內置式PMSM。
而表貼式PMSM直軸和交軸電感近似相等,相對于內置式的轉子初始位置檢測難度更高。估計坐標系旋轉高頻電壓注入法[7-8]是表貼式PMSM轉子初始位置檢測研究的熱點。文獻[9]在磁場定向閉環控制系統中注入d軸高頻正弦電壓信號,根據q軸電流信號與轉子位置正比關系,將電流信號通過高通、帶通濾波并積分得出轉子位置估算值。文獻[10]將載波頻率成分法與旋轉高頻電壓注入法相結合,將電流信號濾波、積分,并對載波頻率成分信號解析其飽和分量幅值的正負,實現轉子磁極判別與位置估算。
本文基于PMSM非線性觀測器[12],通過對表貼式PMSM兩相靜止坐標系下注入高頻電壓信號,實現了表貼式PMSM轉子初始位置快速估計。并應用Lyapunov函數證明了該非線性觀測器的穩定性,對初始位置收斂的象限問題進行了分析。最后的仿真結果證明,與傳統的脈振高頻注入法相比,本方法不需要高通、帶通濾波以及積分, 轉子初始位置收斂快速,易于工程實現。
1 轉子初始位置觀測器
PMSM矢量控制在α,β靜止坐標系下的數學模型:
(1)
式中:R,L,ψf為電阻、電感、磁鏈;iα,iβ,uα,uβ為α,β軸電流電壓;p為微分算子;θe為轉子位置電角度;ωe為轉子電角速度。
設變量:
(2)
觀測變量:
(3)
根據式(1),可得:
(4)
根據文獻[11],y非線性觀測器:
(5)
式中:γ>0為非線性觀測器收斂系數。將式(3)代入上式,可得:
(6)
則:
(7)
(8)
證明:

選擇α,β軸高頻注入信號:
(10)
式中:ωh為注入信號的頻率;uA為注入信號的幅值。在高頻注入情況下,觀測變量漸近收斂,穩態點的象限位置由式(6)右邊第一項正負號決定。當PMSM的初始位置為π<θ<1.5π時,觀測變量收斂過程中ωe<0,sinθe<0,cosθe<0,即:
(11)

2 非線性觀測器算法



(f) 循環步驟(c)計算。
3 仿真實驗
PMSM仿真實驗系統參數:4對極,磁鏈0.082 5 Wb,電阻12.4 Ω,電感0.031 9 H,摩擦系數4.8×10-5N·m·s,電機軸轉動慣量1.67×10-5kg·m2,空間矢量PWM頻率10 kHz[12]。非線性觀測器收斂系數8×103,高頻注入信號幅值5 V,頻率500 Hz。
PMSM電角度初始位置為第一象限,注入高頻α,β軸電壓信號,非線性觀測器的觀測變量cosθe,sinθe曲線,如圖1所示。圖1中PMSM電角度初始位置為第一象限0.8rad,觀測變量cosθe,sinθe穩態調節時間為20 ms,收斂快。PMSM非線性觀測器與文獻[9]高頻注入法的初始位置觀測輸出曲線如圖2所示。圖2中,文獻[9]高頻注入法轉子初始位置曲線的穩態調節時間達到80 ms,收斂緩慢。在第一象限,兩種估計方法都無需補償π。
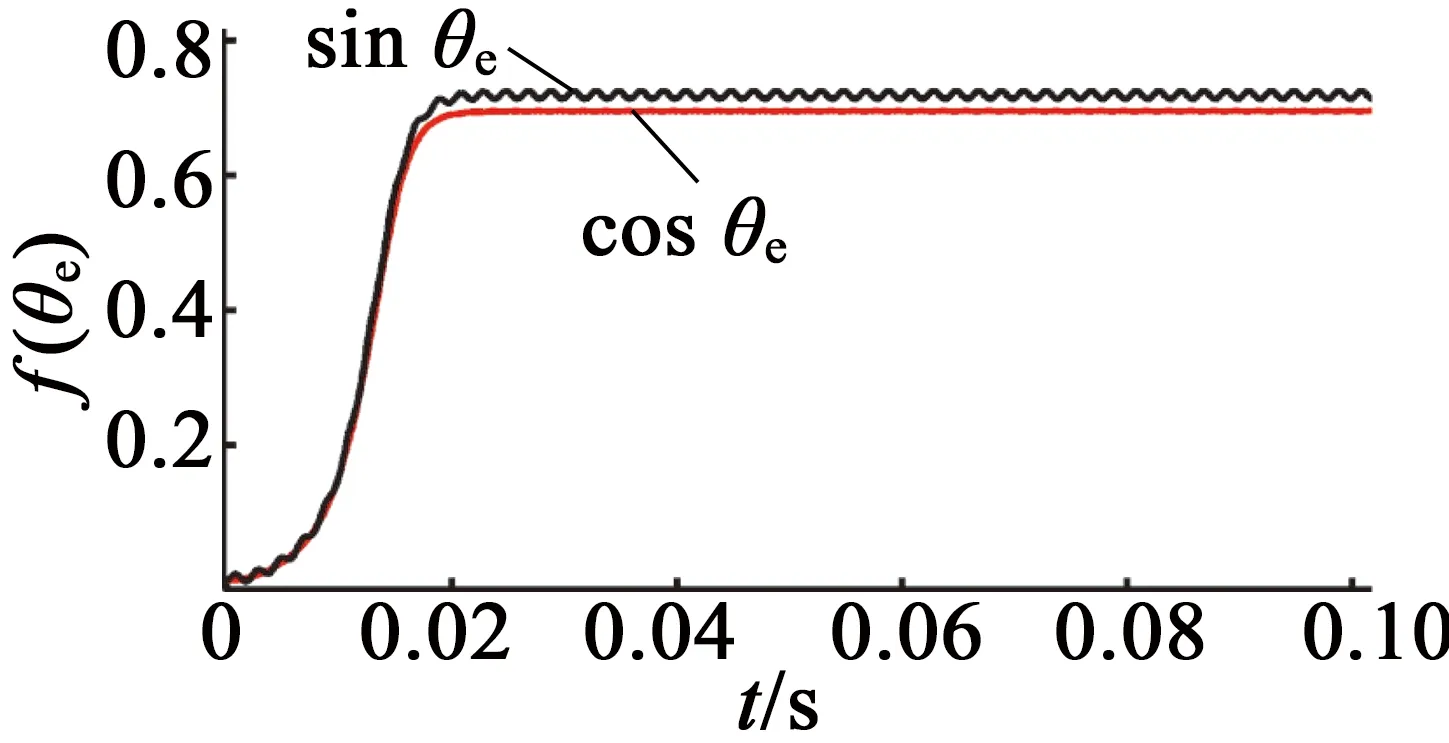
圖1 第一象限非線性觀測器變量曲線

圖2 電機初始位置估計曲線
PMSM電角度初始位置為第二象限,注入高頻信號,非線性觀測器cosθe,sinθe曲線,如圖3所示。圖3中PMSM電角度初始位置為第二象限2.3 rad,觀測變量穩態調節時間短,且cosθe收斂于負數,sinθe收斂于正數,因此高頻注入非線性觀測法無需補償π。非線性觀測器與高頻注入法的初始位置觀測曲線,如圖4所示。圖中文獻[9]高頻注入法除了穩態收斂緩慢,且需要補償π。

圖3 第二象限非線性觀測器變量曲線

圖4 第二象限電機初始位置估計曲線
非線性觀測器與高頻注入法的初始位置在第三、四象限觀測曲線,如圖5、圖6所示。圖5、圖6中,文獻[9]高頻注入法除了穩態收斂緩慢,第三象限需要補償π,第四象限需要補償2π,算法復雜。而高頻注入非線性觀測器法的穩態收斂較快,根據磁極判斷統一補償π。
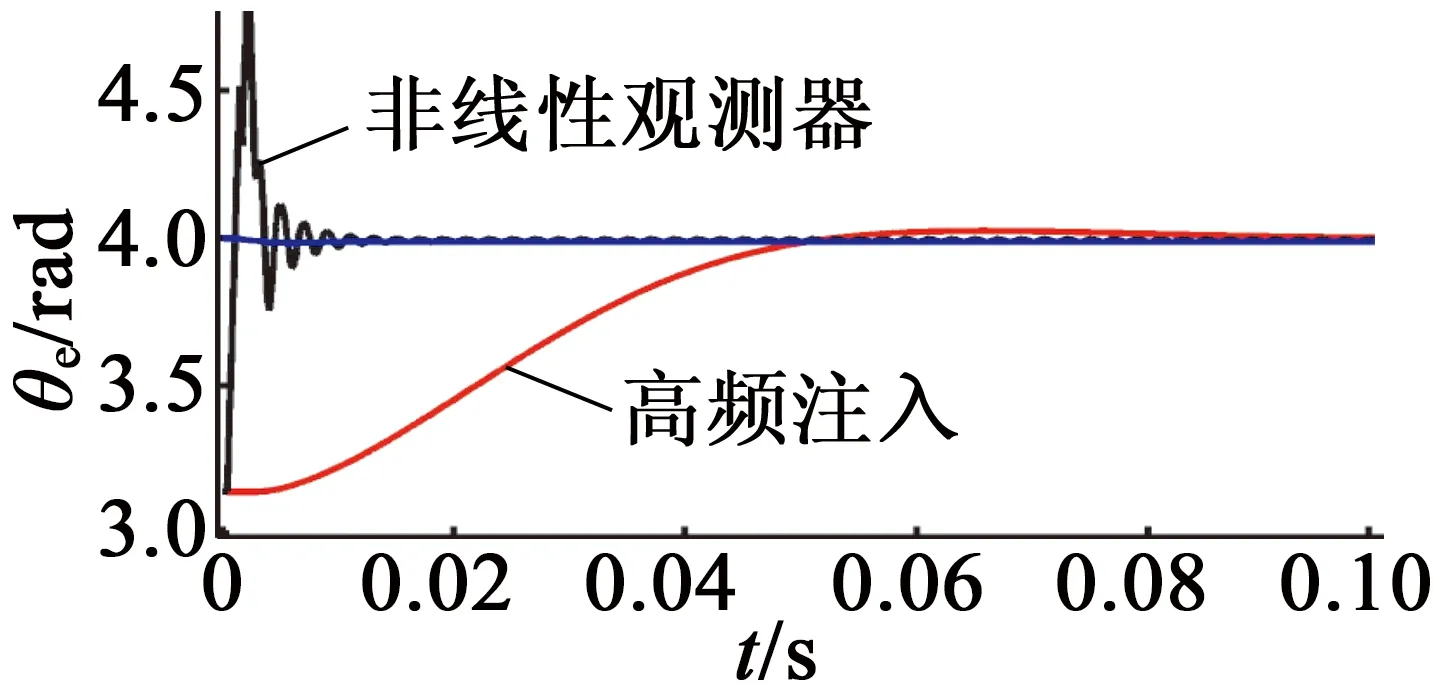
圖5 第三象限電機初始位置估計曲線
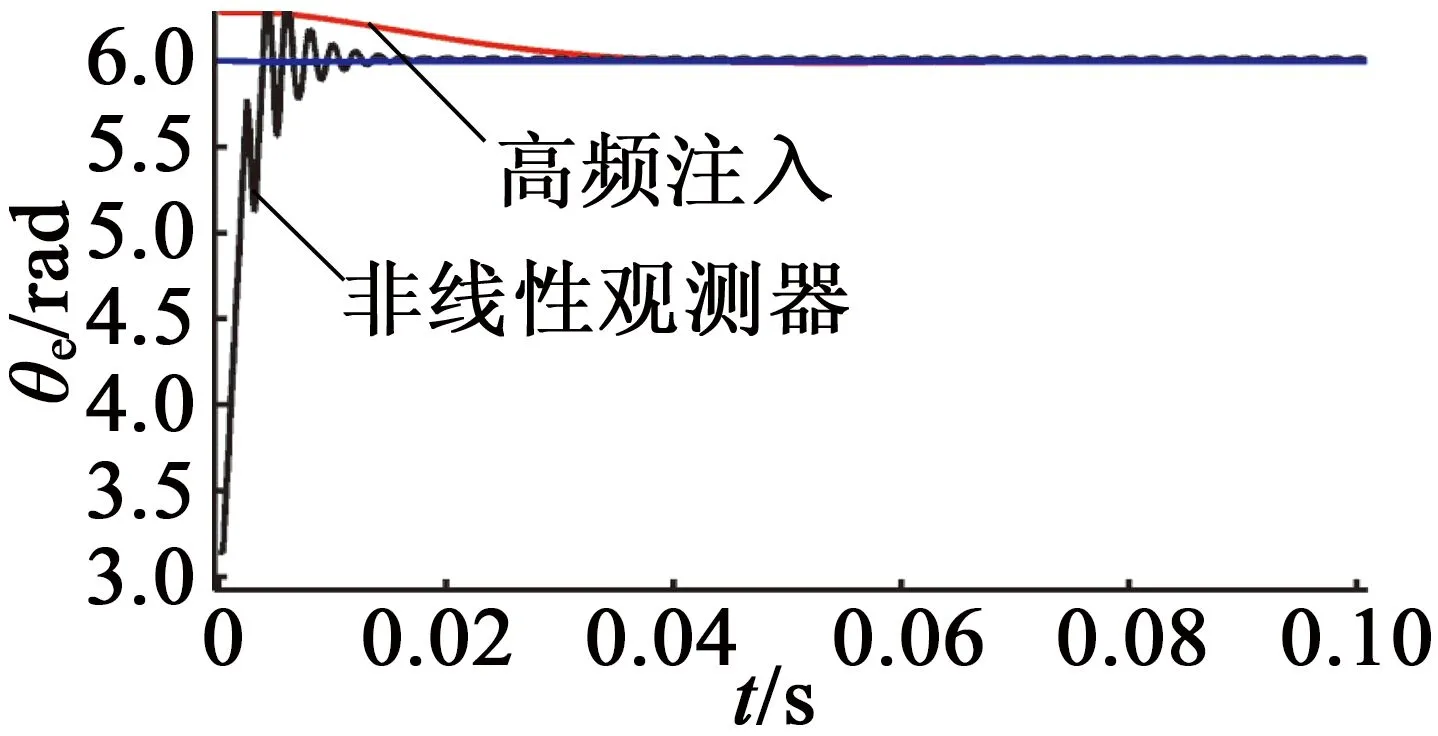
圖6 第四象限電機初始位置估計曲線
4 結 語
本文構建了基于兩相靜止坐標系下注入高頻電壓信號的PMSM轉子初始位置非線性觀測算法,通過Lyapunov函數證明了該觀測器的穩定性。仿真結果表明,本估計方法能夠快速且準確地估計出PMSM轉子初始位置,該方法具有收斂快速、算法簡單等優點,適合工程應用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06