車載異步電動機靜止參數(shù)辨識方法研究
2019-03-29 03:15:26林巨廣汪雷鳴吳仕統(tǒng)
微特電機 2019年3期
關(guān)鍵詞:實驗
林巨廣,汪雷鳴,吳仕統(tǒng),劉 健
(合肥工業(yè)大學(xué),合肥 230009)
0 引 言
近幾年來,新能源汽車迎來了蓬勃發(fā)展時期。推動新能源汽車發(fā)展,能夠減少國家石油對外依賴,保障國家能源安全,對促進國內(nèi)汽車工業(yè)實現(xiàn)彎道超車具有重要意義。新能源汽車電驅(qū)動系統(tǒng)的研究也越來越受到人們的重視。在國內(nèi),目前主流的電驅(qū)動系統(tǒng)主要分為永磁同步電動機電驅(qū)動系統(tǒng)和異步電動機電驅(qū)動系統(tǒng)。與永磁同步電動機相比,異步電動機具有結(jié)構(gòu)簡單、成本低廉、性能穩(wěn)定、不會退磁、極限轉(zhuǎn)速更高等優(yōu)點,在國家加強稀土資源監(jiān)管和稀土資源成本提高的當(dāng)下,具有很好的應(yīng)用前景。
常見的異步電動機控制算法有v/f控制算法、矢量控制算法。其中,空間矢量控制算法能夠讓異步電動機獲得與直流電機一樣的動、靜態(tài)性能,因而廣泛應(yīng)用于新能源汽車的異步電動機控制中。但空間矢量控制算法的磁場定向和磁鏈計算都需要電機參數(shù)的參與,如果電機參數(shù)精度不夠,矢量控制將無法滿足控制需求[1]。因此,精確辨識電機參數(shù)就成了實現(xiàn)矢量控制的前提。
傳統(tǒng)的異步電動機參數(shù)辨識方法是通過直流實驗來辨識電機定子電阻,通過空載實驗來辨識互感,通過堵轉(zhuǎn)實驗來獲取轉(zhuǎn)子電阻和定、轉(zhuǎn)子漏感。這種方法相對復(fù)雜,需要人工進行堵轉(zhuǎn)和接線,并且在電機安置好后難以實現(xiàn)。考慮到新能源汽車驅(qū)動系統(tǒng)都有配套的控制器,有必要研究一種在靜止?fàn)顟B(tài)下利用控制器自動辨識異步電動機參數(shù)的方法。
為實現(xiàn)異步電動機靜止?fàn)顟B(tài)下的參數(shù)辨識,國內(nèi)外學(xué)者提出了很多參數(shù)離線辨識方法。文獻[2]提出通過給定特定的定子勵磁電流、轉(zhuǎn)矩電流和磁鏈角,經(jīng)過矢量坐標(biāo)變換產(chǎn)生直流、單相和三相電源,完成異步電動機的直流實驗、單相電源堵轉(zhuǎn)實驗以及開路實驗,這種方法雖然能夠減小由死區(qū)、三相電阻不對稱等因素造成的辨識誤差,但是空載實驗無法讓電機保持完全靜止。文獻[3]提出了依次用兩種不同頻率的正弦信號激勵異步電動機,完成電機參數(shù)辨識的方法,并分析了在此激勵下,反Γ型等效電路辨識的電機參數(shù)精度比 T 型和Γ型等效電路高。這種方法的定、轉(zhuǎn)子電阻和漏感的辨識精度較高,但由于高頻交流激勵使互感感抗遠(yuǎn)大于定、轉(zhuǎn)子電阻值,造成計算過程中電流隨頻率變化不敏感,致使互感的辨識效果很差。文獻[4]詳細(xì)闡述了基于遞推最小二乘算法的電機參數(shù)離線辨識的具體實現(xiàn),通過簡化電機數(shù)學(xué)模型,采用改進歐拉數(shù)值解法,求解巴特沃思數(shù)字濾波狀態(tài)方程,進而提高運算精度。實驗結(jié)果表明所提方法穩(wěn)定性良好,辨識的準(zhǔn)確性較高。但是這種方法需要額外設(shè)計硬件濾波電路和偽隨機白噪聲序列,不具有普遍性。
本文在反Γ型電路的基礎(chǔ)上,通過分析逆變器非線性特性,添加直流分量的單相實驗,完成異步電動機的參數(shù)辨識。最后,對一臺峰值功率為60 kW的新能源汽車用異步電動機進行了參數(shù)辨識,以驗證辨識算法的實用性和有效性。
1 異步電動機參數(shù)辨識模型
異步電動機常用的等效電路模型有T型等效電路,Γ型等效電路和反Γ型等效電路,如圖1所示。
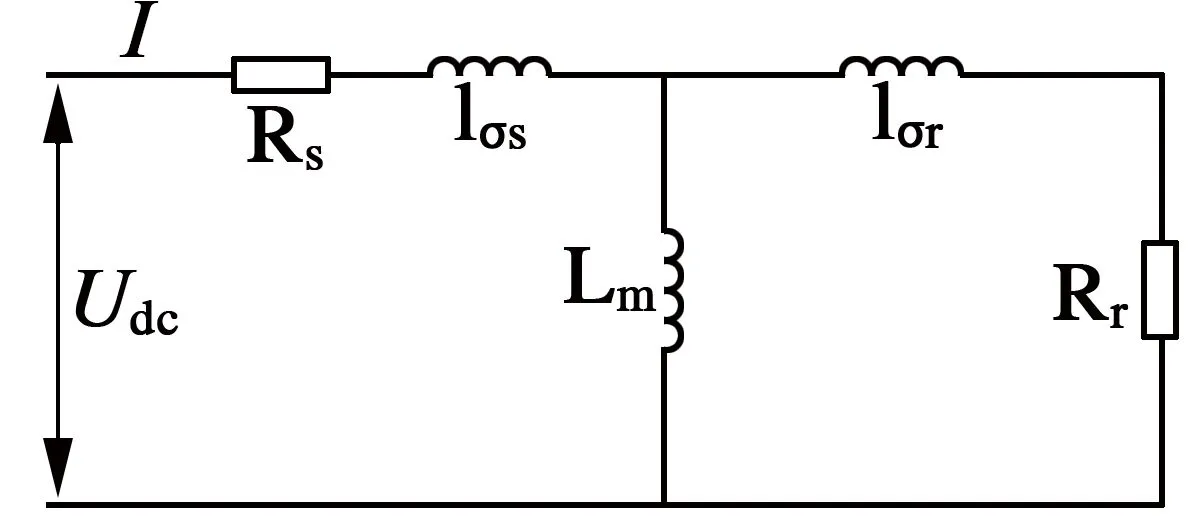
(a) T型等效電路
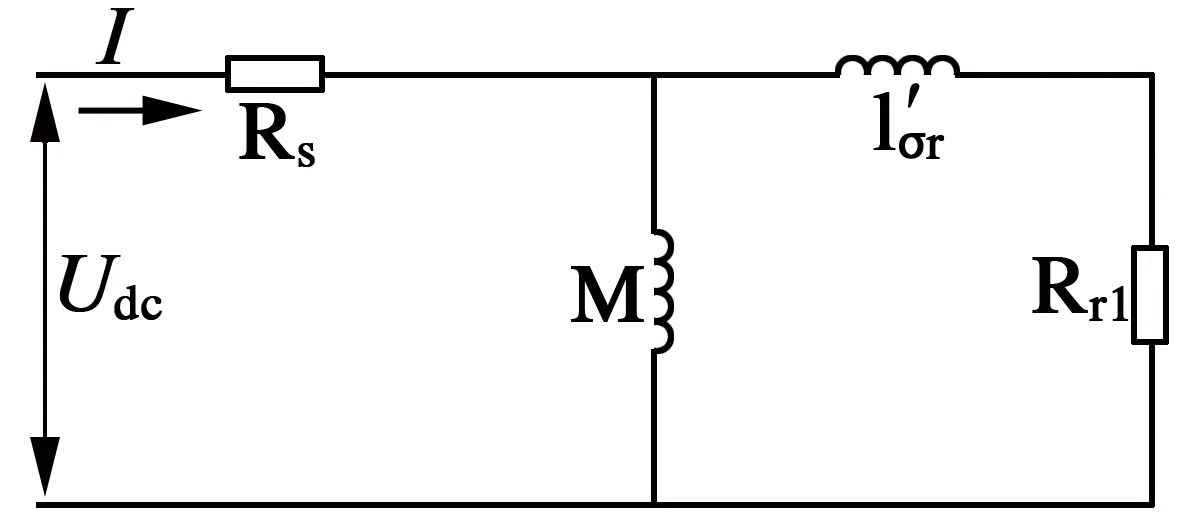
(b) Γ型型等效電路
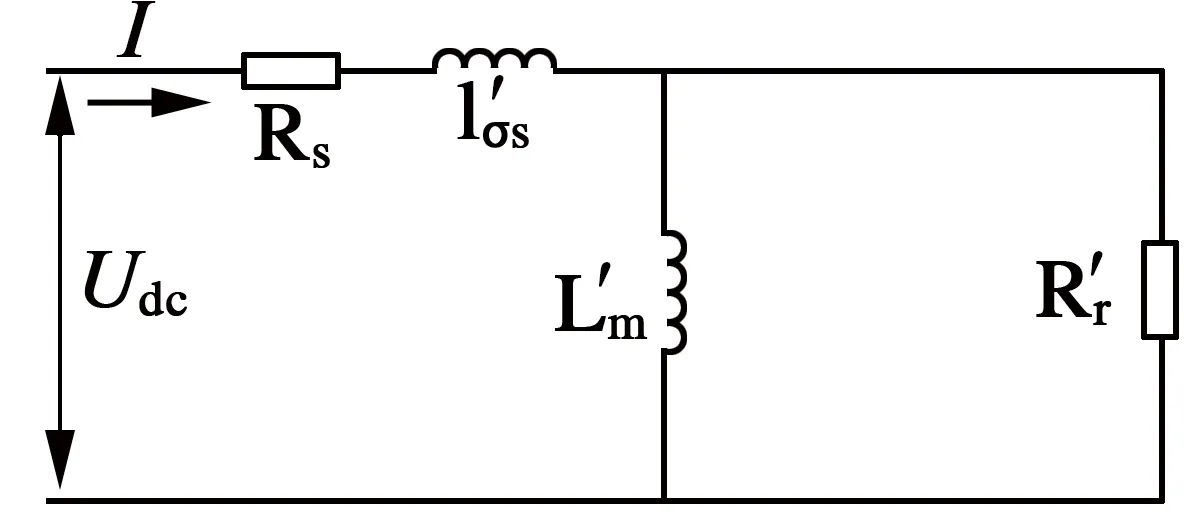
(c) 反Γ型等效電路
圖1異步電動機三種等效電路圖
文獻[3]證實了在單相實驗下反Γ型等效電路具有更高的參數(shù)辨識精度,本文采用反Γ型等效電路對異步電動機進行分析。根據(jù)反Γ型等效電路與T型等效電路,推導(dǎo)出兩者的參數(shù)關(guān)系如下:
(1)
2 單相實驗原理
異步電動機參數(shù)主要是指定子電阻、轉(zhuǎn)子電阻、電機漏感和互感,本文通過單相實驗實現(xiàn)辨識異步電動機的所有參數(shù)。單相實驗電路圖如圖2所示。
異步電動機采用逆變器供電。給定Uα,Uβ,使直流母線電壓經(jīng)過空間矢量變換轉(zhuǎn)換為需要的電壓。為保證異步電動機的三相參數(shù)都能參與辨識,通過給定Uβ=0使其中兩相短接。此時異步電動機三相當(dāng)于兩相并聯(lián)并與最后一相串聯(lián),這樣測得的參數(shù)數(shù)值為實際參數(shù)數(shù)值的1.5倍。再調(diào)整磁鏈定向角依次為0,120°,240°,求取三相不同組合后的參數(shù),取平均值,盡量減少三相不平衡帶來的影響。令:

圖2單相實驗電路圖
(2)
此時,B,C兩相短接,A,B兩相接入交流電。
3 電壓重構(gòu)與誤差分析
由于市面上控制器大多不配有電壓傳感器,本文中的定子側(cè)電壓通過PWM占空比重構(gòu)的方式獲得,理論上A,B,C三相的一周期內(nèi)等效電壓:
(3)
式中:mA,mB,mC為逆變器的開關(guān)管理論占空比;Udc為直流母線電壓。在單相實驗中,B,C相開關(guān)管狀態(tài)始終保持一致。所以式(3)可化簡:
(4)
但是實際上重構(gòu)的電壓與實際電壓存在著偏差,文獻[5]指出,引起輸出電壓誤差的主要因素包括功率器件的開關(guān)延遲時間,死區(qū)時間,IGBT和二極管的導(dǎo)通壓降,寄生電容引起的時序混亂以及硬件延遲。
為了減小誤差,需要對重構(gòu)電壓進行補償。忽略時序混亂和硬件延遲,文獻[6]給出了一個PWM載波周期內(nèi)方波交流信號激勵下單相補償電壓值:
(Udi-UIGBT+Udc)fC(TD-toff)(6)


理論上,這種補償方式能夠很好地補償死區(qū)時間、開關(guān)延遲時間引起的電壓誤差和IGBT及反并聯(lián)二極管上的導(dǎo)通壓降。但是,由于逆變器的非線性特性,在電流過零點時會產(chǎn)生零電流鉗位效應(yīng),造成過零點附近的電壓畸變嚴(yán)重,并且電流極性很難判斷,因此不能正確地補償電壓。為了消除零電流鉗位效應(yīng),文獻[6]提出了一種基于電流相角逆推計算的有效的在線死區(qū)補償技術(shù),但是這種技術(shù)在低頻下有較大的誤差。因此本文采用更為簡單有效的方式,即添加直流分量 ,確保電路中的電流瞬時值在任何時刻始終大于零,這樣就避免了零電流鉗位效應(yīng)的影響。
但是實際上,定子側(cè)的電壓是母線電壓經(jīng)過逆變器逆變的。通過指定給定電壓可以決定定子側(cè)電壓直流分量幅值和交流電壓分量的幅值,但由于轉(zhuǎn)子繞轉(zhuǎn)只能在變化的電壓下感生電流,指定的兩個電壓分量的幅值能產(chǎn)生多大的對應(yīng)電流并不能確定。考慮到計算交流分量電流時需要額外將感抗考慮進去,因此可以得出直流分量電壓的幅值對電流分量來說更為敏感的結(jié)論。如何確定交、直流電壓分量的幅值是添加直流分量的難點,本文給出了詳細(xì)的確定交、直流分量幅值的方法。
4 參數(shù)辨識
4.1 定子電阻辨識
定子電阻辨識通過通入直流進行單相實驗來實現(xiàn)。令:
(8)
此時,B,C兩相短接,A,B兩相接入直流電。為了減小功率管導(dǎo)通壓降帶來的誤差,對異步電動機依次通入兩次不同的直流電流。假設(shè)IGBT和反并聯(lián)二極管的非線性誤差為Δu,則有:

當(dāng)兩次通入直流電開關(guān)管的壓降不變時,可以通過求斜率的方式消除誤差。求取的定子電阻值:
文獻[7]給出了IGBT和二極管壓降與電流的關(guān)系曲線。在該文獻中,當(dāng)負(fù)載電流ix>3 A時,IGBT和二極管壓降變化非常小。不同型號的IGBT和二極管壓降與相電流關(guān)系曲線雖然不完全相同,但是當(dāng)電流足夠大時,它們的壓降都近似為常數(shù)。對于車載異步電動機來說,很小的給定電壓就能激勵比較大的電流,所以在直流實驗中可以將開關(guān)管的壓降看作常值。
直流實驗時,給定電壓太小會導(dǎo)致占空比過小,使得死區(qū)時間和開關(guān)管延時對電壓的影響增大,從而引起定子側(cè)電壓有一定程度上的畸變,造成實際電壓的誤差。所以在保證電流不超過限幅值的條件下給定電壓應(yīng)盡可能得大。實驗中,設(shè)置門檻電流,在限幅電流到門檻電流之間留有一定的裕量,電壓從5 V開始逐漸往上增加,每次增加0.1 V,同時,對電流進行采樣信號,當(dāng)電流值超過門檻電流時,不再增加電壓幅值。選擇最后兩組數(shù)據(jù),按照式(10)進行計算。電壓UT通過給定電壓Uref獲得:
UT=Uref-UdcfC(TD-toff)(11)
需要注意的是,為了避免溫升對電阻的影響,每次通電時間不應(yīng)過長。每個電壓幅值通電2 s,冷卻1 s后,再進行下次通電。
4.2 轉(zhuǎn)子電阻、漏感及互感辨識
轉(zhuǎn)子電阻、漏感、互感辨識通過兩次單相實驗實現(xiàn)。文獻[3]中給出了轉(zhuǎn)子電阻,漏感和互感的計算公式:
(12)
式中:I1為線電流;V1為異步電動機定子側(cè)電壓,V1通過占空比重構(gòu)并補償?shù)姆绞将@取。
為避免零電流鉗位效應(yīng),使補償后的結(jié)果更加準(zhǔn)確,在通入交流電辨識參數(shù)過程中添加直流分量,使激勵生成的電流信號總是大于0。同時,添加的直流分量能夠充分的勵磁線圈繞組,使測量的互感值為車載異步電動機正常運行時的互感值。所以在激勵信號的選擇上,直流分量幅值被設(shè)定為直流實驗中靠后的數(shù)值,交流分量幅值設(shè)定需滿足小于直流分量。此外,考慮到轉(zhuǎn)子電阻受集膚效應(yīng)的影響,為了測出車載電機在正常運行時的轉(zhuǎn)子電阻值,選擇在額定轉(zhuǎn)速下的頻率附近進行辨識,并保證兩次交流分量的頻率相差不大。
在向異步電動機注入兩次帶有直流分量的不同頻率的交流正弦電壓信號后,采集電流值iA(t)與發(fā)送的占空比D(t)。截取采集的電流值穩(wěn)定部分進行快速傅里葉(FFT)變換,獲取電流值的零頻分量以及基波幅值和相角。再將每次采樣的電流值與零頻分量相減,判斷其正負(fù)作為A相電流的極性代入式(13)中獲得補償后的電壓,Dref為DSP設(shè)置的載波幅值。
Udc)fC(TD-toff)]·sgn(iA) (13)
按截取的電流值長度截取補償后的電壓并進行FFT變換,獲取重構(gòu)電壓的基波幅值和相角,將電流和重構(gòu)電壓的基波幅值和相角代入式(12)中進行運算。
5 實驗驗證
實驗平臺是以DSP芯片TMS570LS1115為核心的車載控制器,逆變器使用的IGBT型號為SKIM606GD066HD。采用上述方法編寫控制程序。待測電機為一款小型新能源汽車車載異步電動機,峰值功率60 kW,額定電壓110 V,極限轉(zhuǎn)速7 000 r/min,電機極對數(shù)為2。實驗中直流母線電壓為145 V,IGBT開關(guān)頻率10 kHz,死區(qū)時間2 μs,控制器電流限幅為650 A,設(shè)置的PWM占空比比較值為4 000。根據(jù)SKIM606GD066HD的參考文檔,電流在400~600 A之間,UIGBT的典型值為1.45 V,Udi的典型值為1.6 V。設(shè)置的門檻電流為600 A。
直流實驗時,電流加到6.4 V時超過門檻電流。所以選擇給定電壓5.8~6.3 V,每兩組之間進行計算,求取平均值。
單相實驗選擇直流分量為6 V,交流分量幅值為3 V。Uα=6+3sin(ωt)。一般異步電動機的額定轉(zhuǎn)速為極限轉(zhuǎn)速的40%左右,所以選擇頻率為80 Hz,84 Hz進行測試。
按照本文的方法,異步電動機參數(shù)辨識結(jié)果如表1所示。

表1 異步電動機參數(shù)辨識結(jié)果
由表1可知,測量結(jié)果的最大誤差在5%左右,說明本文的添加直流分量后再補償?shù)姆椒ㄊ怯行У摹?/p>
單相實驗下,交流信號頻率為80 Hz和84 Hz時,異步電動機的電流波形如圖3所示,占空比波形如圖4所示。

(a) 80 Hz電流波形圖
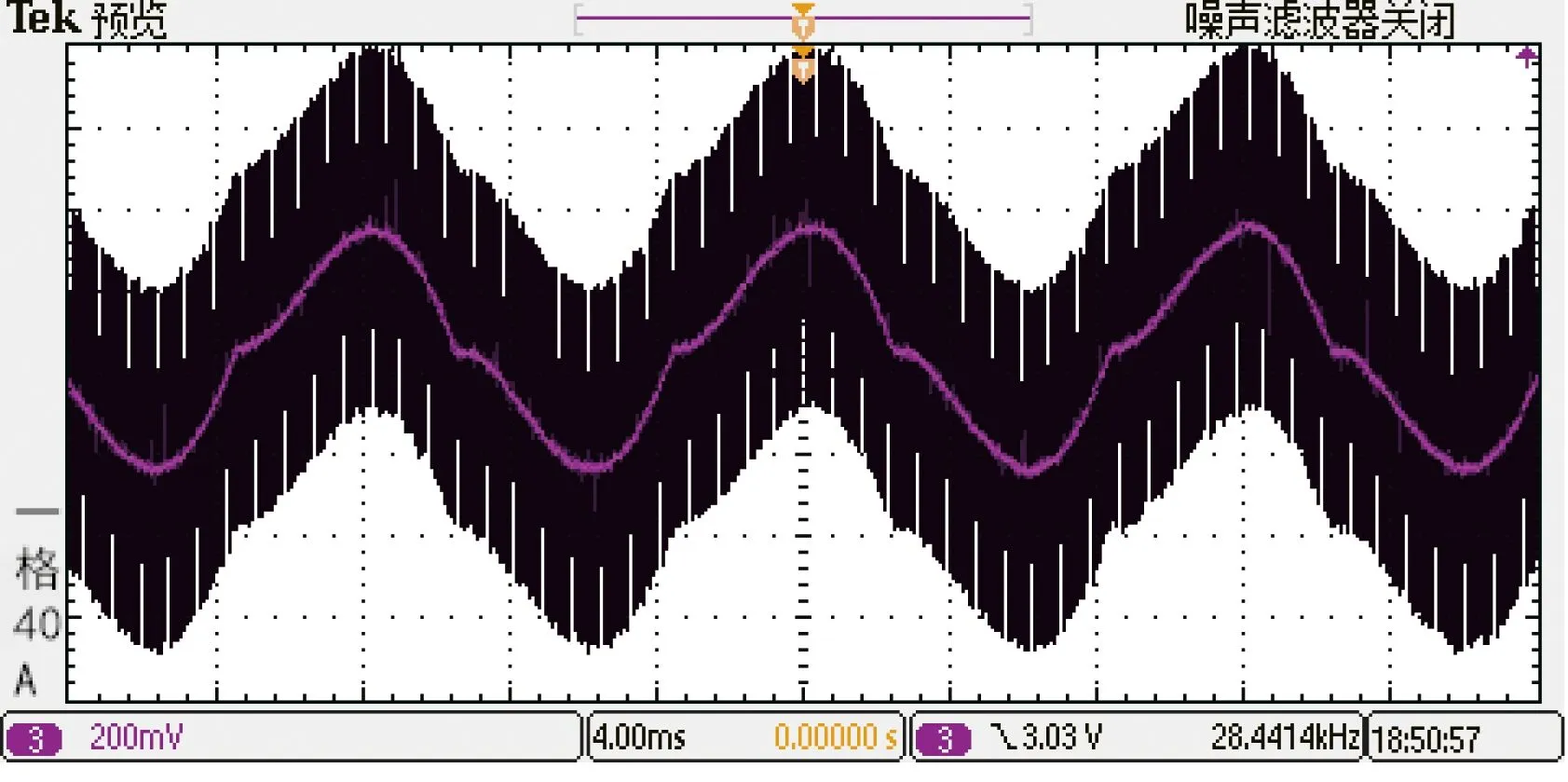
(b) 84 Hz電流波形圖
圖3單相試實驗下電流波形圖
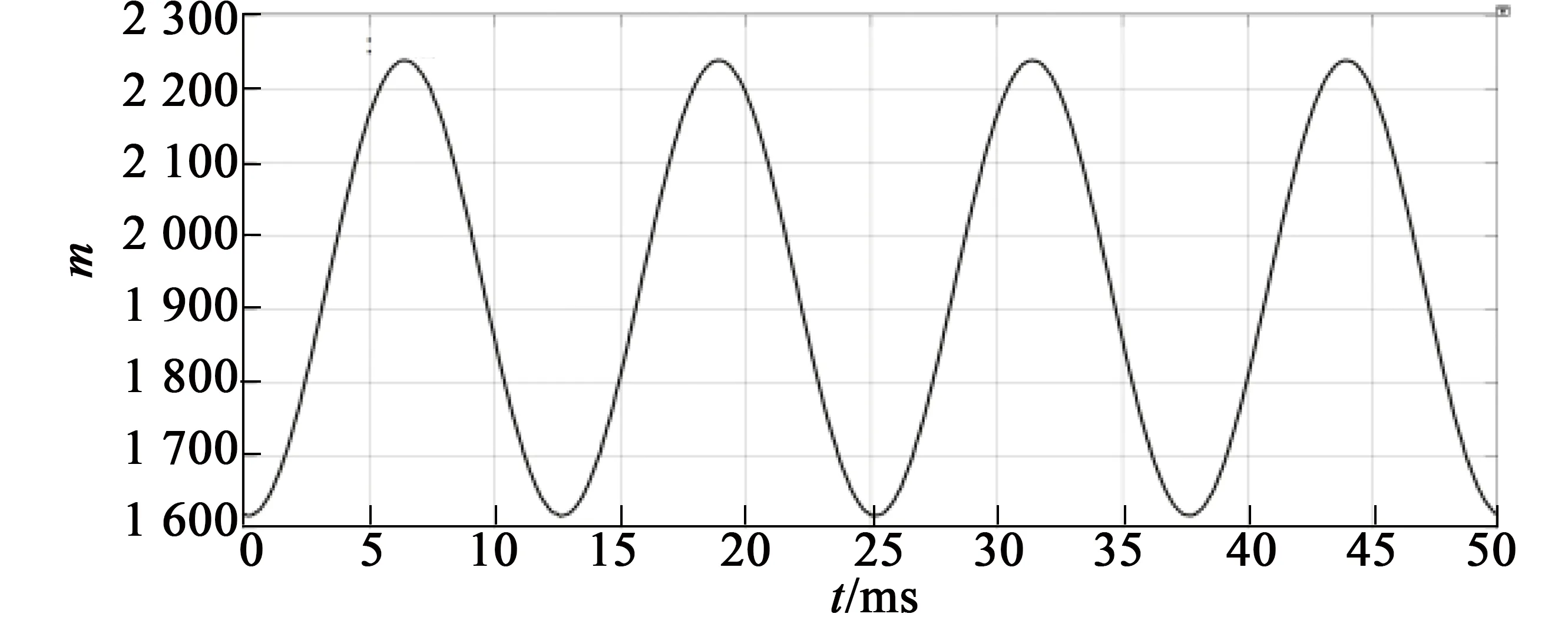
(a) 80 Hz占空比波形(比較值為4 000)

(b) 84 Hz占空比波形(比較值為4 000)
圖4單相試實驗下占空比波形
6 結(jié) 語
本文對新能源汽車車載異步電動機靜止?fàn)顟B(tài)下的參數(shù)辨識進行了研究,分析了逆變器的非線性特性和電壓重構(gòu)的誤差,在單相實驗的基礎(chǔ)上,提出在交流信號中添加直流分量的方法避免了零電流鉗位效應(yīng),更好地補償了逆變器非線性特性引起的誤差。同時直流分量的引入也保證了異步電動機能夠充分勵磁,獲取的是車載異步電動機正常運行狀態(tài)下的互感。最后在一臺峰值功率為60 kW的車載異步電動機上進行了實驗驗證,驗證了本文方法的有效性與可行性。該參數(shù)辨識方法只需要汽車電源與車載控制器就能夠?qū)崿F(xiàn),具有較強的通用性。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55