基于旋轉變壓器的PMSM位置和速度檢測方法
2019-03-29 03:15:28胡亮燈
微特電機 2019年3期
關鍵詞:變壓器
李 兵,胡亮燈
(海軍工程大學,武漢430033)
0 引 言
永磁同步電動機(以下簡稱PMSM)具有結構簡單、運行可靠、體積小、功率密度高等一系列特點,以其為核心組成的永磁電機電力推進系統更適合當今艦船的發展趨勢,現已成為國內外艦船電力推進系統的研究重點[1]。為滿足電機驅動系統的高精度、快速性、可靠性等方面的要求,就需要精準的電機位置參數來實現電機的控制[2-5]。而旋轉變壓器是一種能輸出與轉子轉角或位置成某種函數關系電信號的交流微特電機,可以用它來精確測量轉子位置信號,從而提高電機的控制性能。旋轉變壓器有良好的抗沖擊力、抗溫度適度變化能力、精度高等優點,廣泛應用于高溫、嚴寒、潮濕、高速、高震動等條件惡劣且穩定性要求很高的環境當中[6-7]。在外加勵磁信號輸入下,旋轉變壓器輸出兩路正余弦模擬信號[8],這時就需要旋轉變壓器解碼芯片將模擬信號轉換成數字信號,才能供DSP,FPGA等控制芯片進行解析處理,從而得到PMSM的轉子位置信息和速度數據。本文基于AD公司專用解碼芯片AD2S1210,對其解碼原理、解碼程序以及解碼電路進行了詳細分析,并在異步電機試驗平臺中進行了驗證,下一步將應用于PMSM的伺服控制中。
1 旋轉變壓器測速原理
采用的多摩川磁阻式旋轉變壓器由轉子和定子2部分組成,如圖1所示,它包含激勵輸入繞組、余弦輸出繞組和正弦輸出繞組3個繞組。
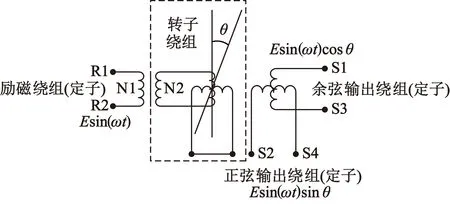
圖1 磁阻式旋轉變壓器等效電路
當來自解碼芯片的交流勵磁電壓Esin(ωt)加在磁阻旋轉變壓器的R1-R2勵磁繞組上時,磁阻式旋轉變壓器定子上正、余弦輸出繞組S2-S4和S1-S3中的感應電動勢分別:
(1)
式中:Esin(ωt)為勵磁激勵信號;ω為勵磁頻率;k為旋轉變壓器變比。
2 AD2S1210數字轉換器解碼原理、解碼電路和解碼程序
本文采用解碼芯片AD2S1210為旋轉變壓器提供正弦波激勵,集成片上可編程正弦波振蕩器,輸出的角度和速度數據用二進制表示,可通過并行接口或串行接口讀取。Type II伺服環路用于跟蹤輸入信號,并將正弦和余弦輸入端的信息轉換為輸入角度和速度所對應的數字,最大跟蹤速率為3 125 r/s。下面主要以16位分辨率(N=16),時鐘輸入8.192 MHz為例進行說明。
2.1 AD2S1210數字轉換器解碼原理
旋轉變壓器解碼芯片解調原理如圖2所示。解碼器內部產生一個跟隨θ的位置估計角度φ,通過乘法器、檢波器、積分器的作用,不斷調整φ的大小,使其逐漸逼近θ,最終當誤差信號接近0時,可以認為sin(θ-φ)=θ-φ=0,即輸出角度φ=θ,實現角度的解碼。對于轉速,其通過誤差信號ksin(θ-φ)進行積分及補償可得轉速解碼。
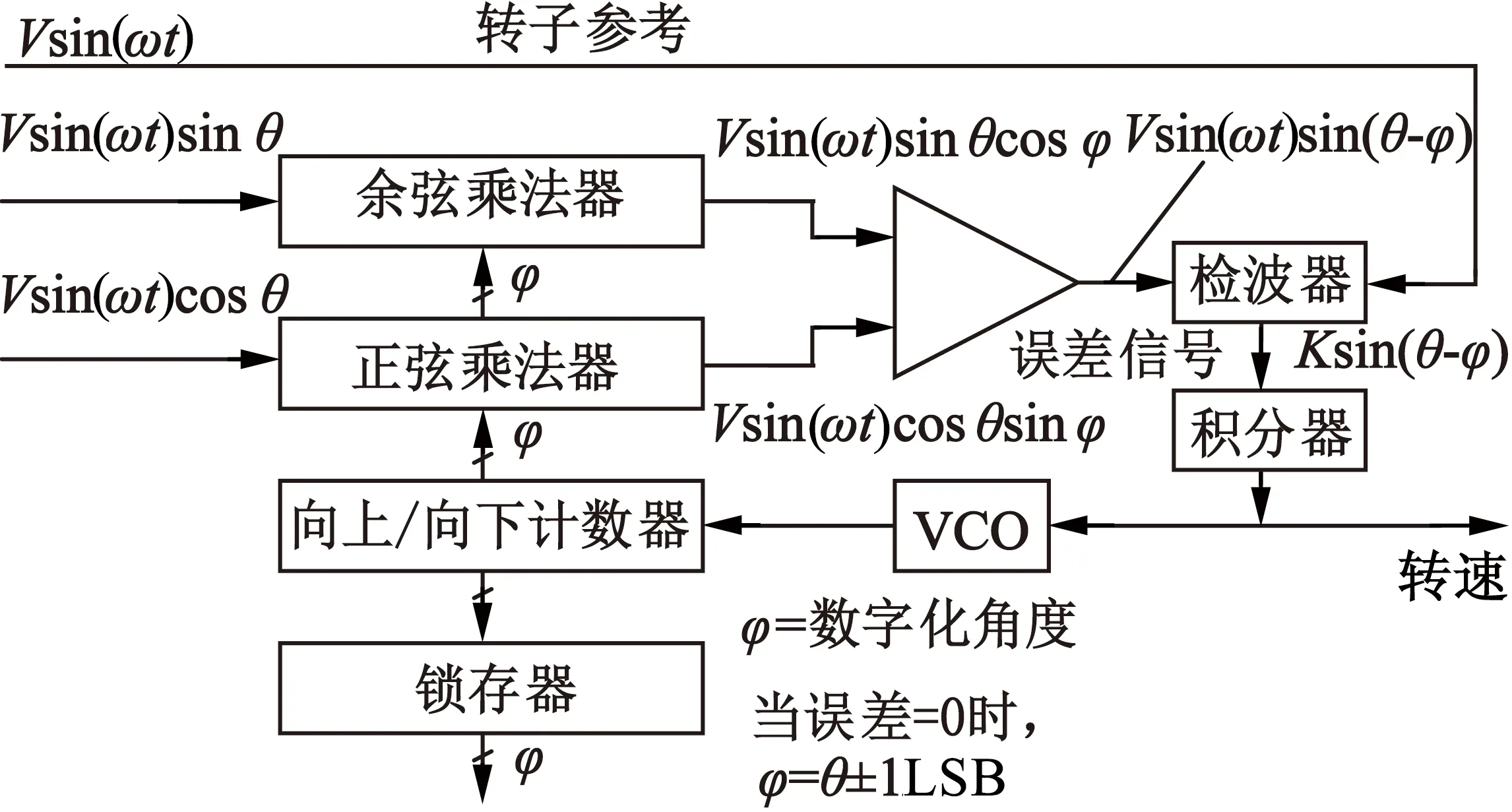
圖2 解碼芯片的解調原理
2.2 AD2S1210數字轉換器角度轉速精度轉換
為簡化分析,假設旋轉變壓器零位置與電機定子A相繞組軸向位置一致,以旋轉變壓器為多對極,電機極對數為旋轉變壓器極對數的X倍時,對解碼芯片輸出的二進制數據與電機絕對位置和轉速進行說明,如表1所示。
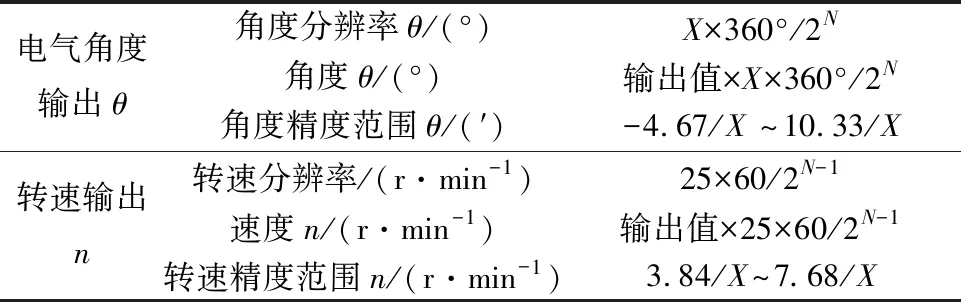
表1 角度、速度A/D轉換關系
2.3 旋轉變壓器解碼電路
旋轉變壓器解碼芯片AD2S1210輸出的轉速、角度和故障數據經并口送入FPGA進行處理,FPGA存儲的轉速或角度數據通過串行光纖傳輸到主控制器,光電轉換得到相應的串行數字信號,用于電機的控制。解碼電路方案示意圖如圖3所示。

圖3 旋轉變壓器解碼電路采用方案
2.3.1AD2S1210勵磁輸出到旋轉變壓器調理電路
AD2S1210勵磁輸出到旋轉變壓器勵磁繞組間的調理電路如圖4所示,其中包括一個推挽輸出級,它能夠向旋轉變壓器提供所需的電源。
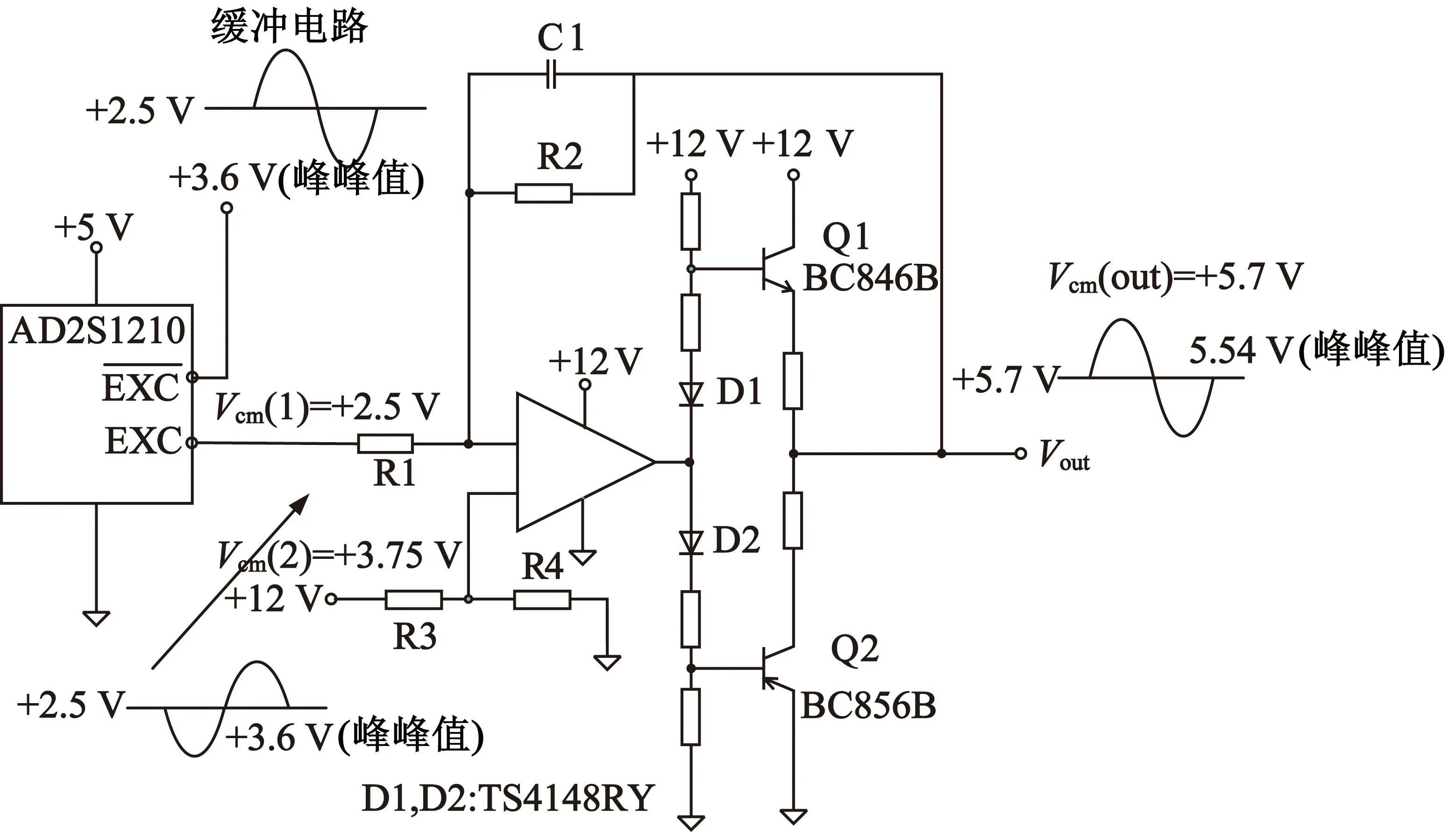
圖4 AD2S1210勵磁輸出到旋轉變壓器調理電路
2.3.2 旋轉變壓器輸出到AD2S1210調理電路
考慮到旋轉變壓器輸出正余旋繞組到解碼芯片AD2S1210的信號可能存在噪聲,先對其進行差模共模濾波,即旋轉變壓器的輸出信號S1和S3,S2和S4經濾波電路后直接進入AD2S1210的SIN,SINLO,COS,COSLO4個管腳,如圖5所示。
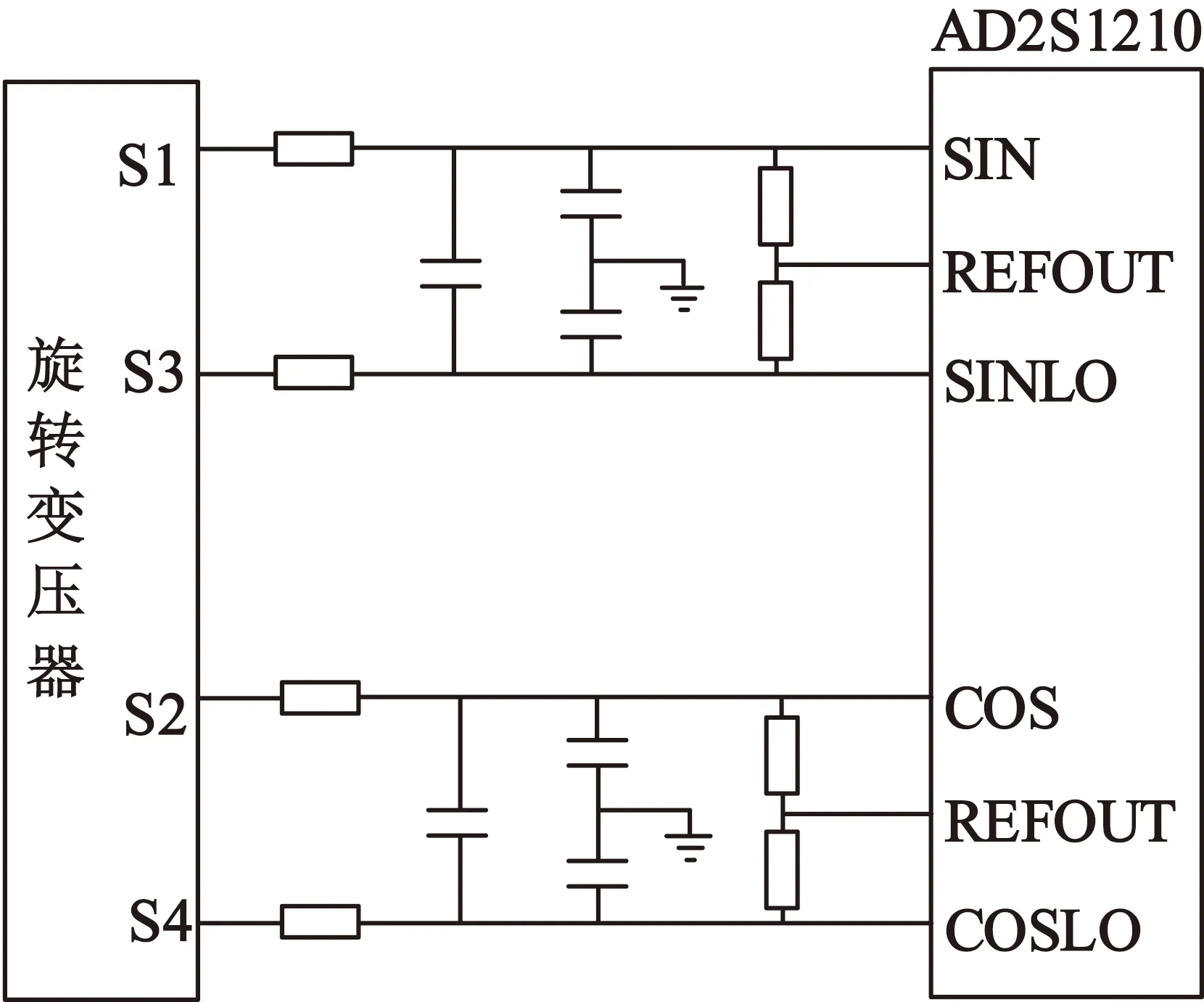
圖5 旋轉變壓器輸出到AD2S1210調理電路
2.4 旋轉變壓器解碼程序說明
對于旋轉變壓器返回的信號,送入基于芯片AD2S1210的旋轉變壓器解碼板,可獲得轉速和角度數據。解碼板轉速和角度數據的讀寫程序基于Verilog語言編寫,程序流程如圖6所示。其步驟如下:程序先初始化;上電控制和復位;進入配置模式;配置完成后,退出配置模式進入普通模式循環,讀取角度、轉速和故障信息。上電控制和復位采用的時序如圖7所示。
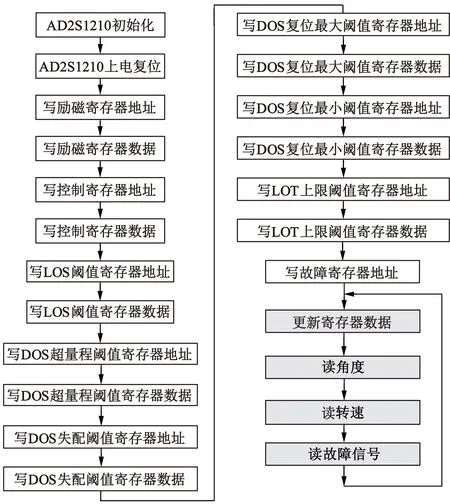
圖6 程序流程
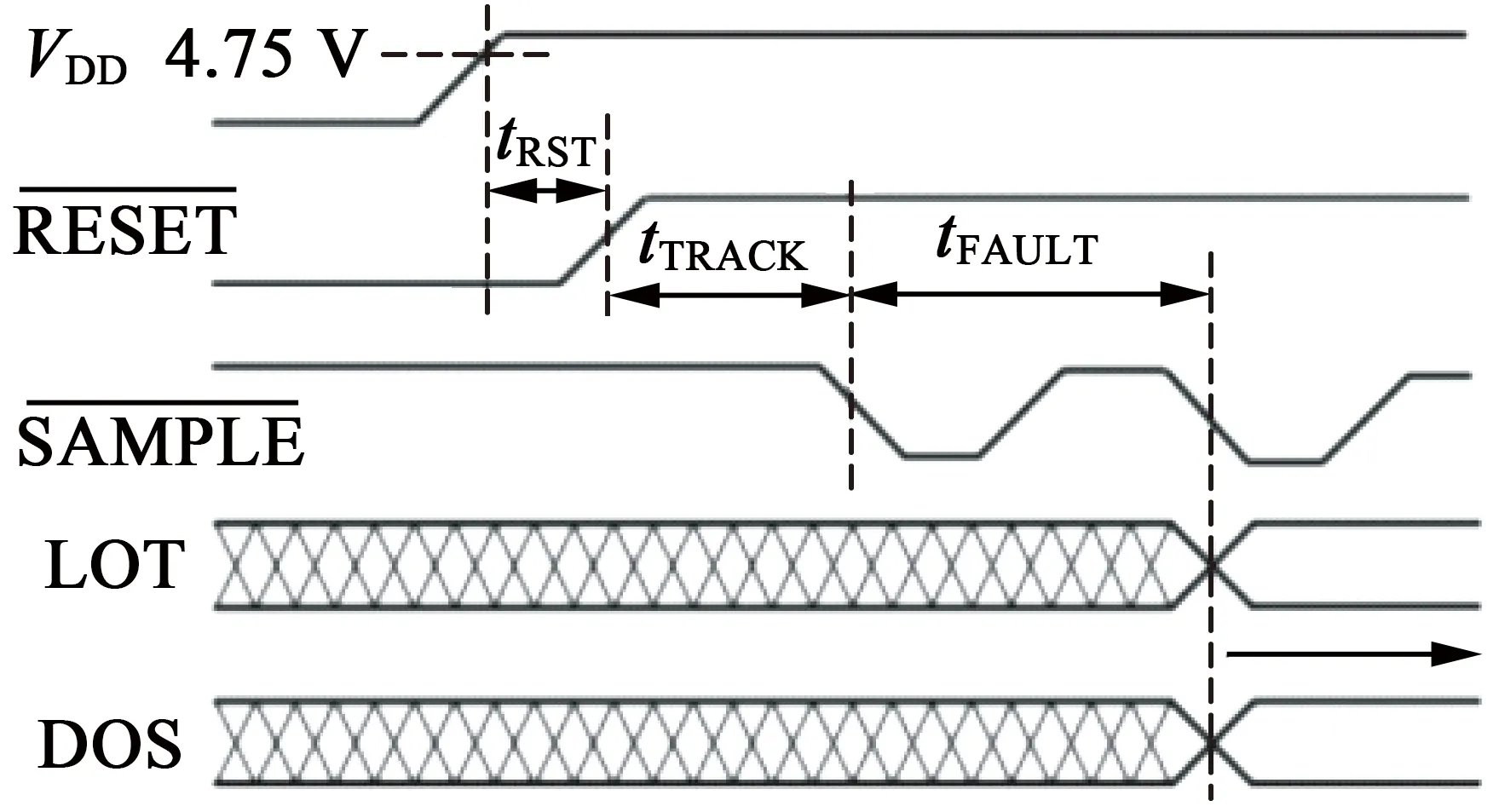
圖7 上電控制和復位時序
3 實驗結果
測試平臺如圖8所示,通過QuarterII9.1軟件SignalTapII查看旋轉變壓器(5對極)解碼板讀取的電機角度和轉速數據(其用二進制表示,角度數據為16bit,轉速數據為15bit),來測試AD2S1210旋轉變壓器解碼板獲取的角度和轉速數據的準確性。其中三相異步電機(2對極,額定轉速1 500r/min)轉子通過彈性連接旋轉變壓器轉子,由LG變頻器調速器進行拖動,整個測試平臺接地。
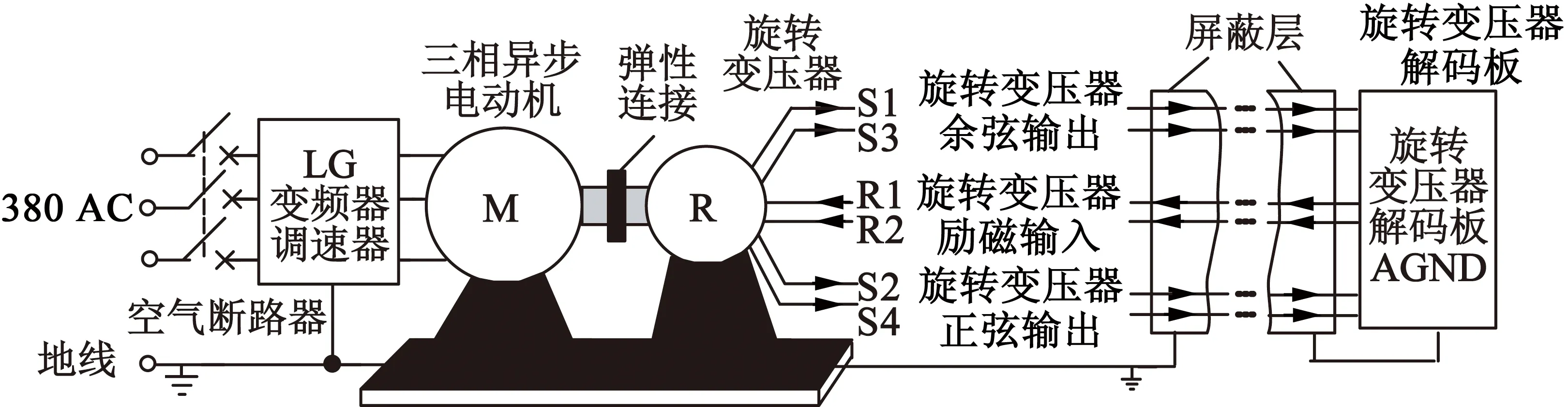
圖8 旋轉變壓器測試平臺
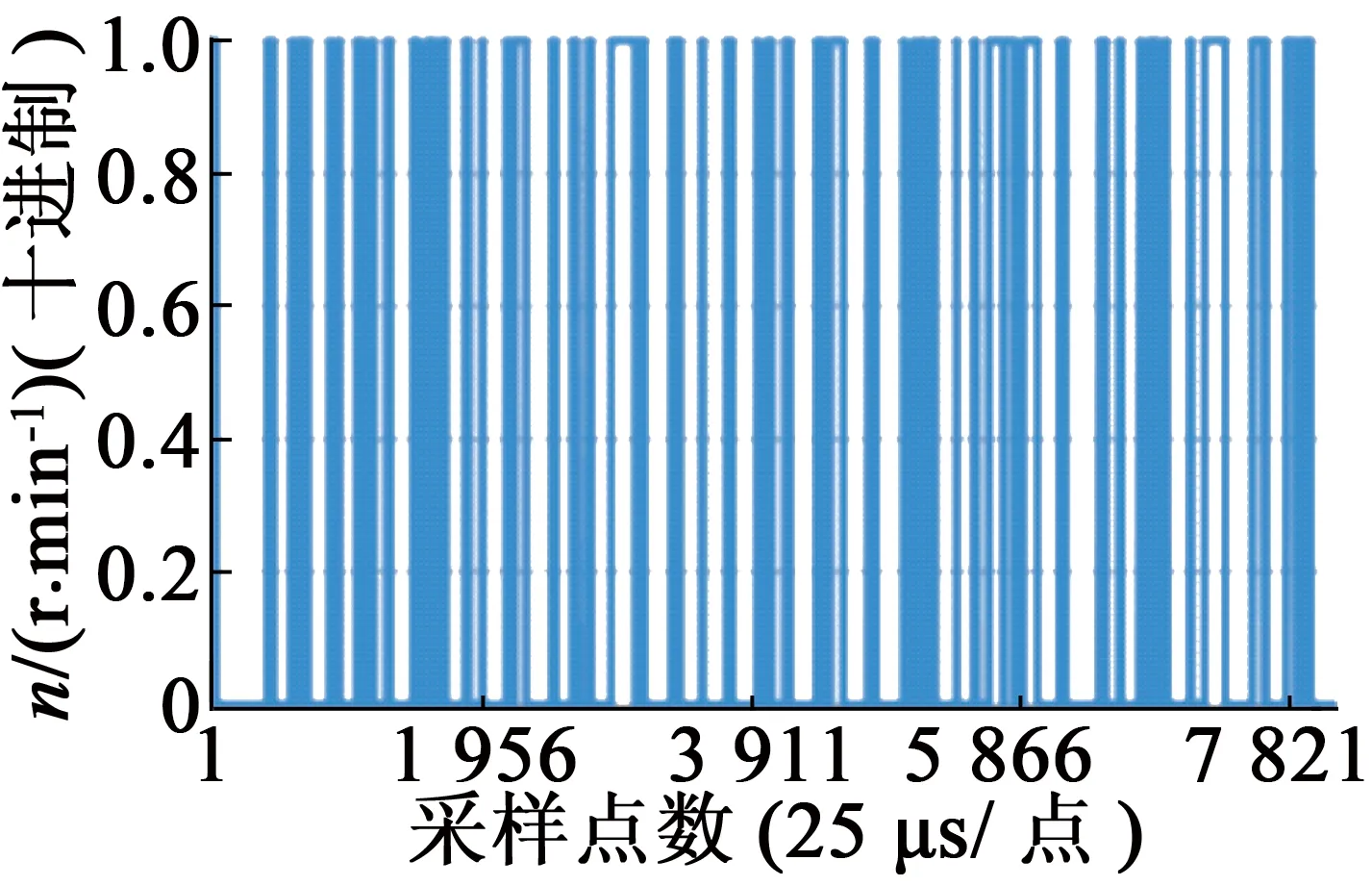
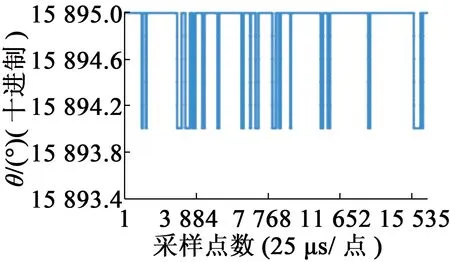
下述基于SignalTapII獲取的數據曲線,其中橫坐標為采樣點數,采樣時間間隔為25μs/點,縱坐標為轉速或角度數據(為便于直觀,已將二進制數據轉換為十進制)。
3.1 電機靜止時,轉子不同位置下測試結果
電機靜止處于不同位置時,通過解碼板獲取的轉速數據波動范圍為0~1,表明了電機靜態時旋轉變壓器解碼板測量轉速精度高,靜態下轉速波動范圍為25r/s×60/2N-1=0.046r/min;通過解碼板獲取的角度數據波動范圍為1,電機靜態下角度精度為2/5×1LSB=0.4×60′×360/65 536=0.082 5′。
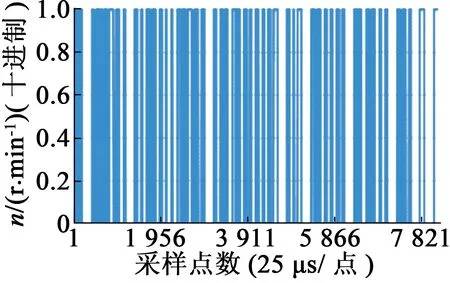
(a) 位置1
(b)位置2
(a) 位置1
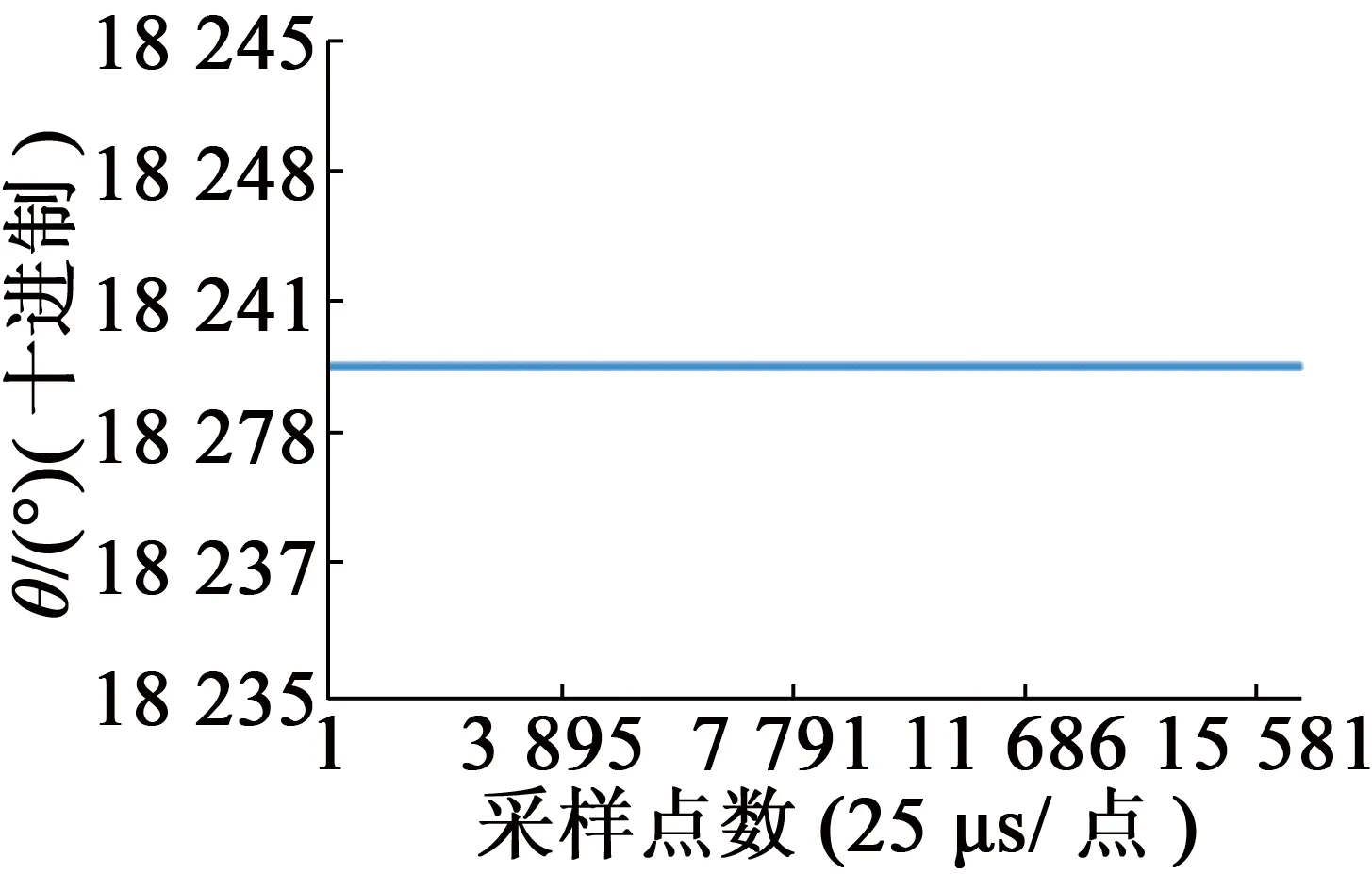
(b)位置2
3.2 電機低速運行時測試結果
如圖11所示,電機轉速為150r/min時,通過SignalTapII捕獲的轉速數據范圍為2 985~3 465,由數據轉換公式:轉速=輸出數值×25r/s×60/2N-1,其對應的轉速為136.6~158.6r/min。

(a) 轉速數據
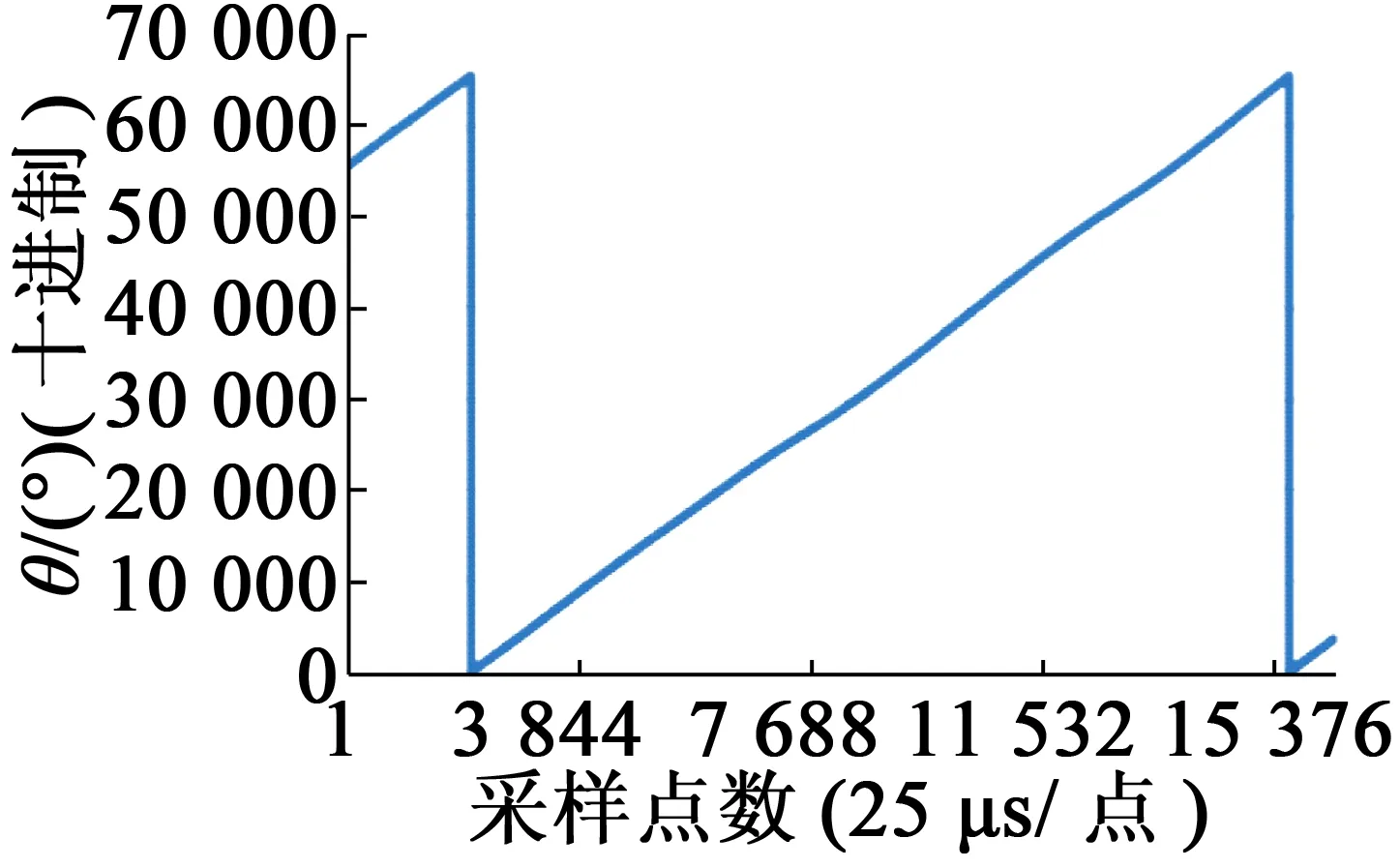
(b)角度數據
由于難以直觀看出角度數據的波動大小,因此在一個電氣角度內數據采用一次線性函數擬合結果與圖11角度數據相減,如圖12所示,從而便于觀察通過解碼板獲取的角度數據的非線性程度。
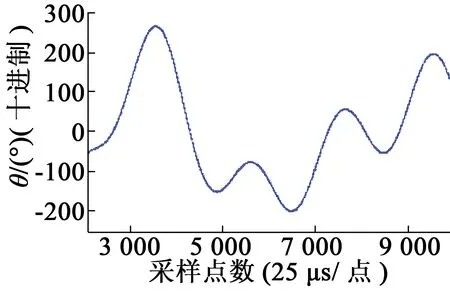
圖12 電機轉速為150 r/min下的角度數據波動
當電機轉速為150r/min時,通過SignalTapII捕獲的角度數據波動達±270,對應電氣角度偏差范圍為±270×360°/65 536≈±1.8°。
3.3 電機高速運行測試結果
從圖12可知,在電機轉速較低時,通過解碼板獲取的電機轉速波動偏大,難以滿足控制要求。為此,在不同轉速下,采用式(2)通過解碼板獲取的電機角度數據來求解電機轉速。
(2)
式中:n為一個電氣角周期轉速平均值;p為旋轉變壓器極對數;TS為采樣時間;N為解碼芯片分辨率;Δθ為單位時間的角度數據變化量。可以看出,增加旋轉變壓器極對數和分辨率可增加轉速精度。
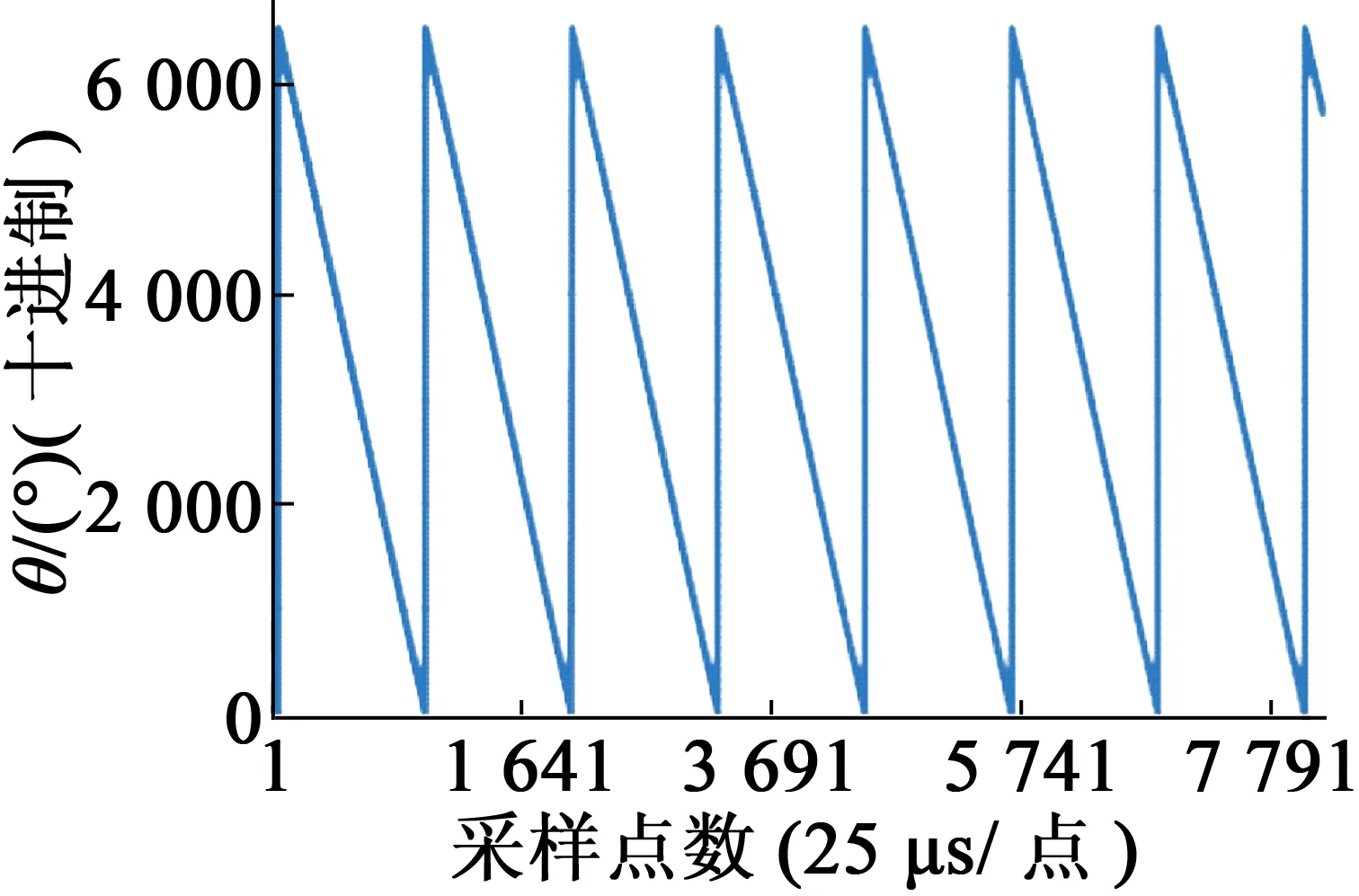
(a) 角度數據
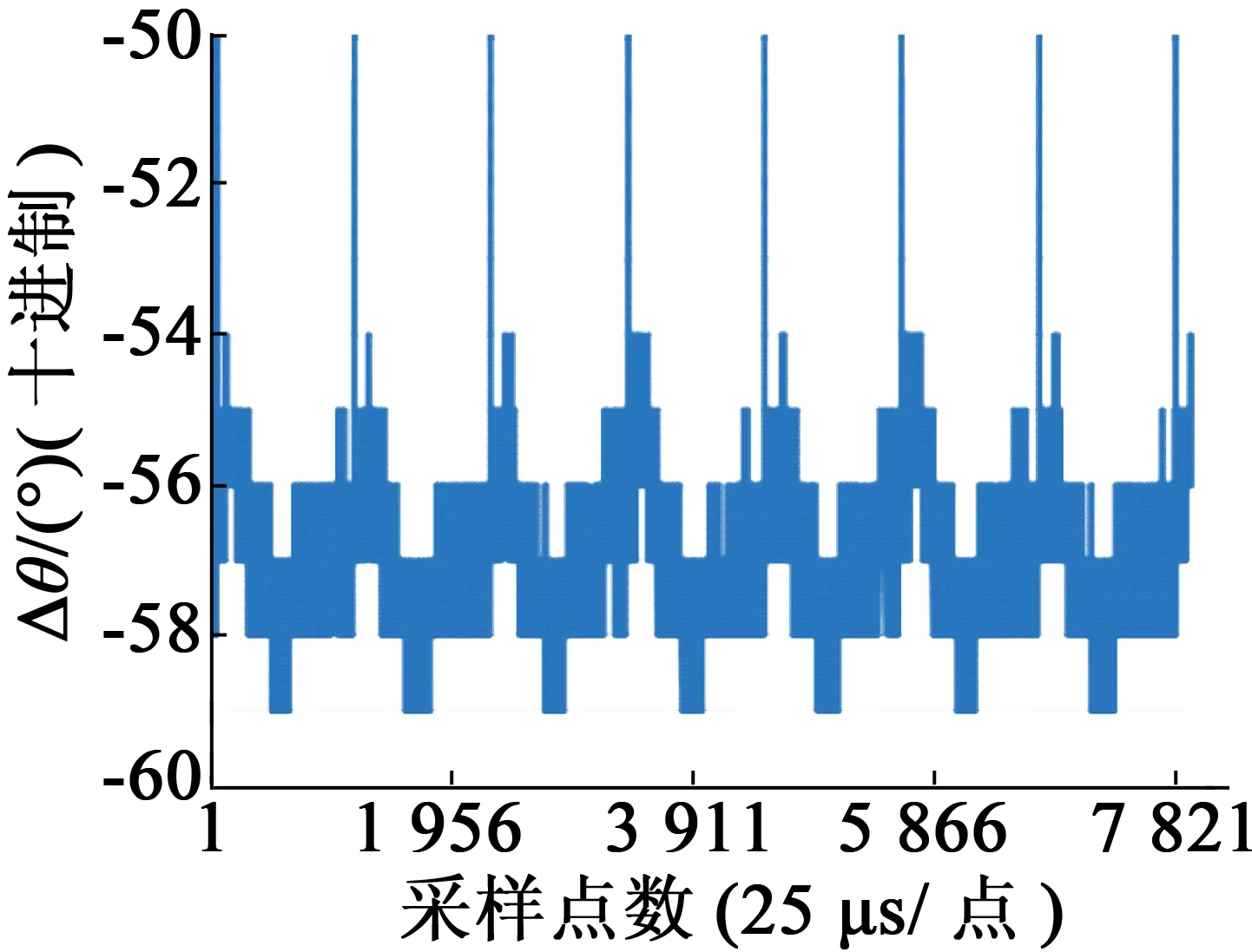
(b)單位時間內角度數據變化量
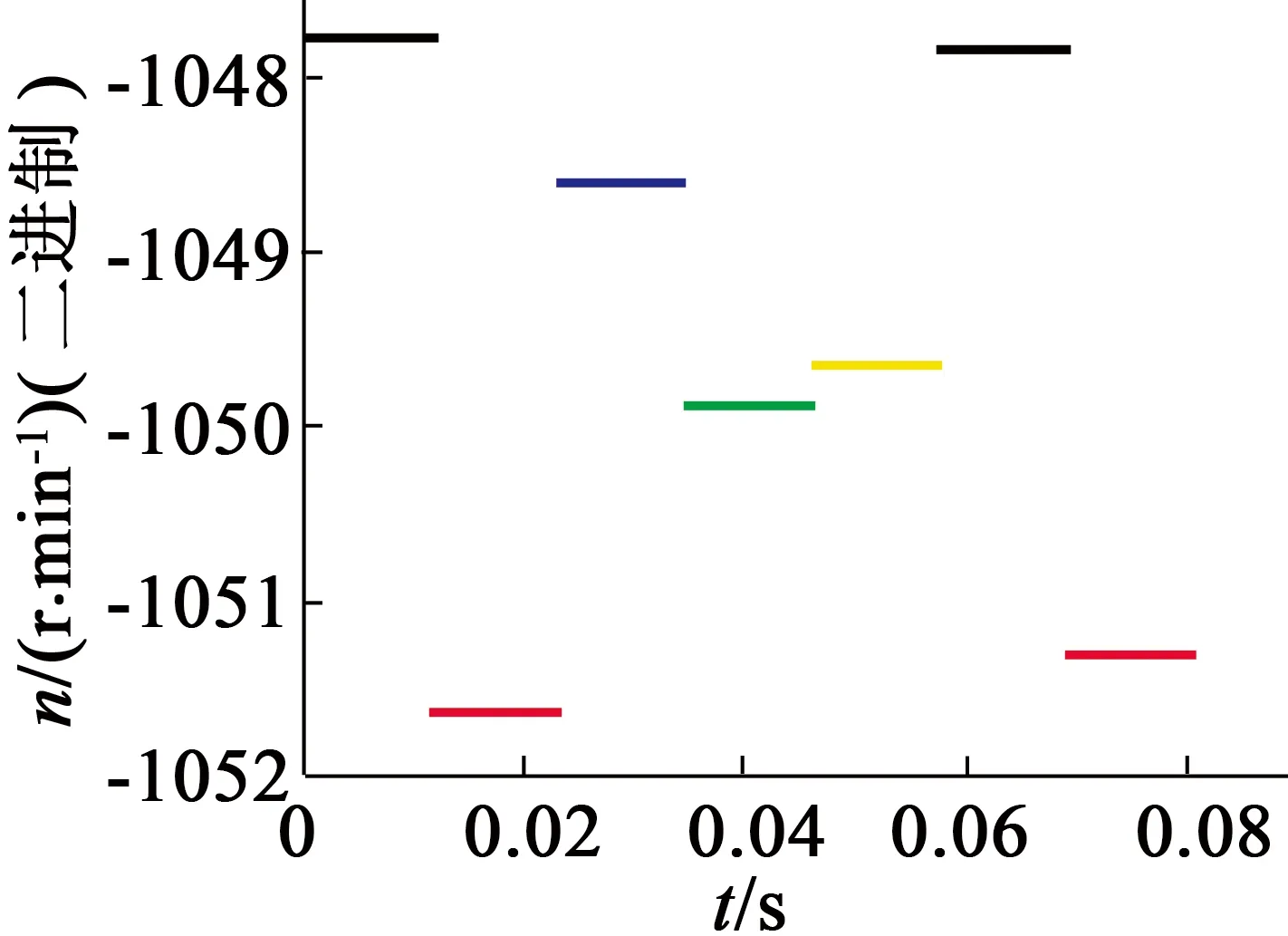
圖14 基于角度變化量計算的轉速均值
從圖14中可知,電機轉速為1 050r/min時,轉速均值波動約2r/min,且轉速均值變化有一定的規律,基本上是5個完整的電氣角后轉速均值開始重復,結合采用的旋轉變壓器為5對極,故測量結果可能與旋轉變壓器本身精度或安裝精度有關。此外,隨著電機轉速的升高,轉速波動降低,表明電機在高速下運行或控制性能優于低速運行或控制性能。
3.4 旋轉變壓器勵磁輸入/正弦余弦波形
在上述基礎上,給出電機運行時示波器保存的旋變變壓器輸入輸出相關波形。圖15為旋轉變壓器解勵磁輸入波形,即通過解碼板AD2S1201芯片生成并經過放大電路輸入給旋轉變壓器的波形。圖16、圖17為旋轉變壓器余弦和正弦輸出波形。
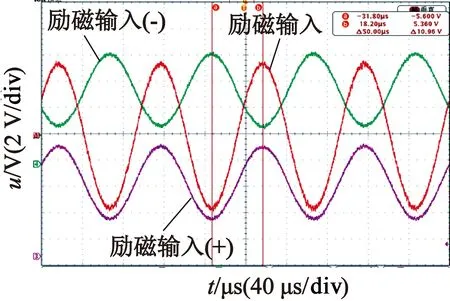
圖15 旋轉變壓器勵磁輸入波形
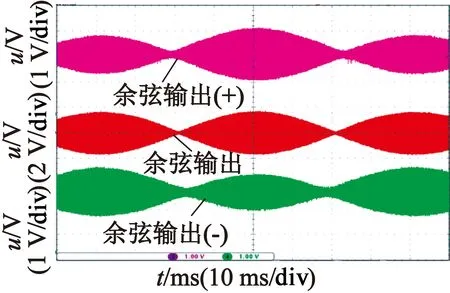
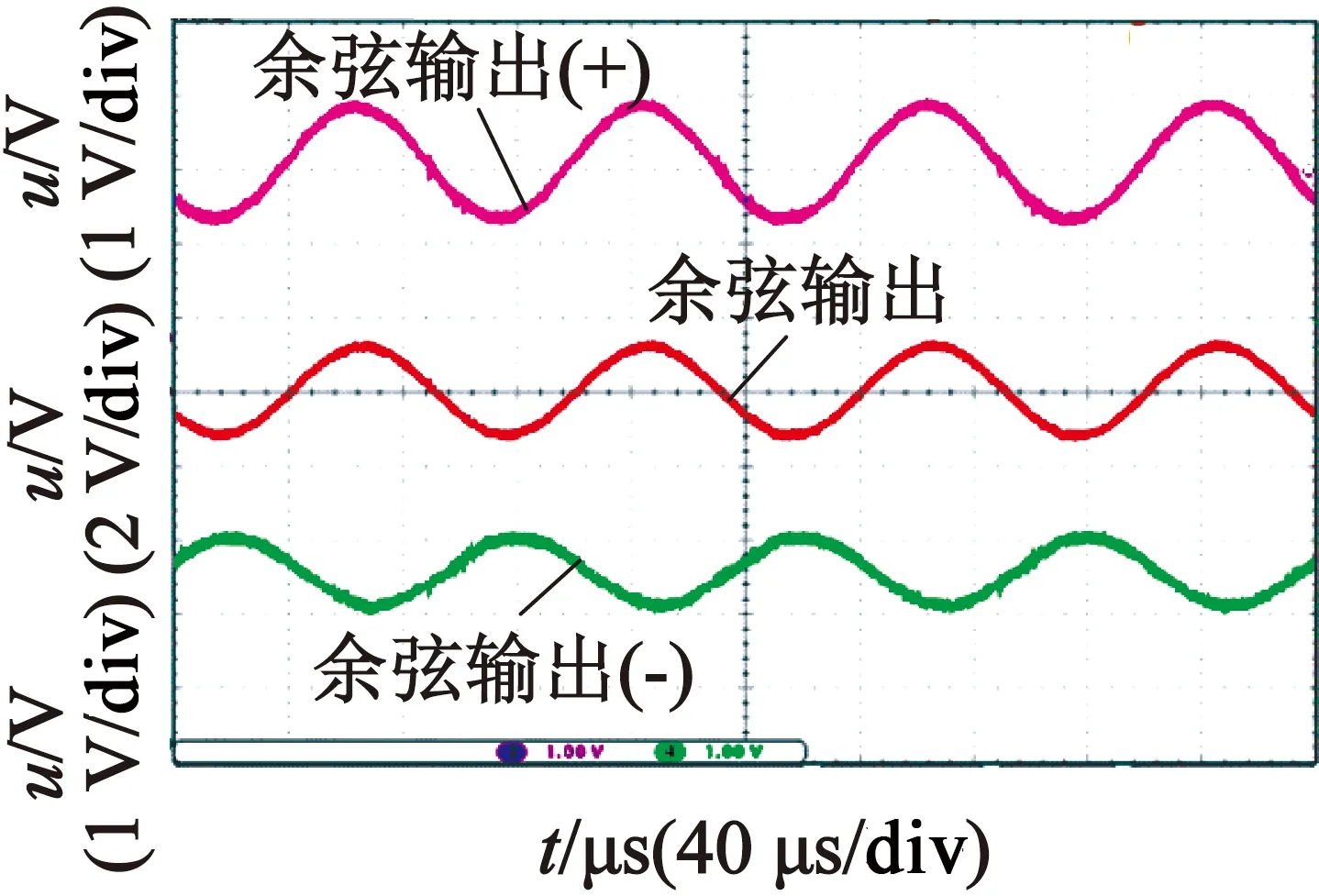
圖16 電機運行時旋轉變壓器輸出的余弦波形
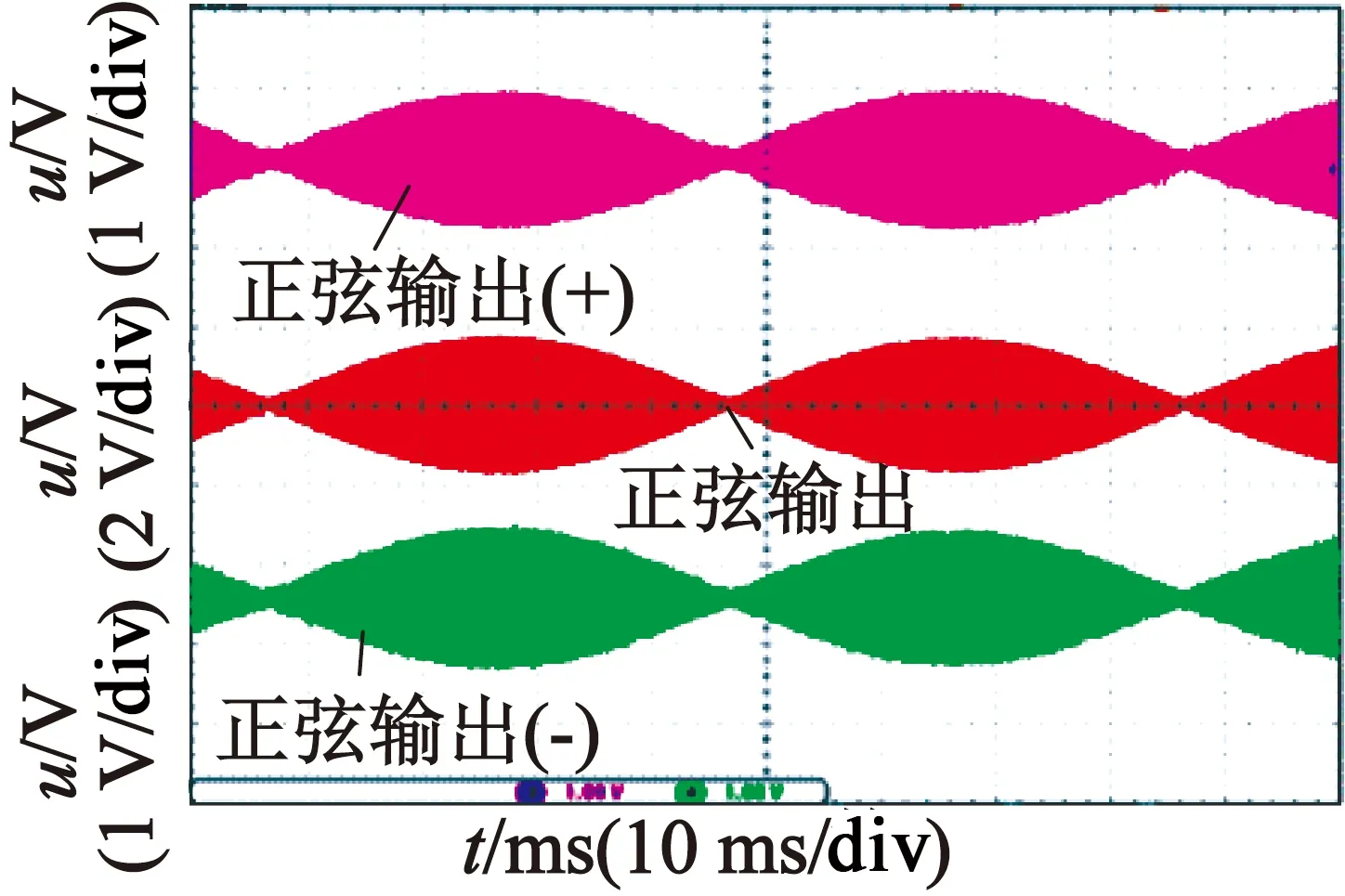
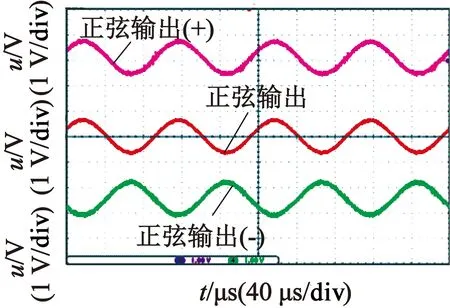
圖17 電機運行時旋轉變壓器輸出的正弦波形
4 結 語
通過以上分析和試驗,驗證了電機靜止下的旋轉變壓器解碼板及解碼芯片的高精度性能,電機角度數據存在一定的線性誤差,和電機轉速成反比關系,且轉速均值波動規律與旋轉變壓器極對數和安裝精度相關。因此,實際應用中,需結合旋轉變壓器安裝情況,通過調整電機對中或利用電機惰轉獲取位置補償數據來修正采集的位置信息,能改善利用解碼板來獲取電機轉速和位置的精度,最終滿足高精度位置檢測性能要求。
猜你喜歡
商品與質量(2021年43期)2022-01-18 05:30:32
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
經濟技術協作信息(2018年7期)2019-01-14 03:05:42
通信電源技術(2018年3期)2018-06-26 06:33:30
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年7期)2017-06-05 09:36:14
電子制作(2017年10期)2017-04-18 07:23:16
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46