三相全橋式開(kāi)關(guān)磁阻電機(jī)轉(zhuǎn)矩脈動(dòng)抑制方法
2019-03-29 03:15:36楊曉生曹廣忠黃蘇丹符興東
微特電機(jī) 2019年3期
關(guān)鍵詞:分配
楊曉生,曹廣忠,黃蘇丹,吳 超,符興東
(深圳大學(xué),深圳 518060)
0 引 言
開(kāi)關(guān)磁阻電機(jī)(以下簡(jiǎn)稱SRM)具有成本低、結(jié)構(gòu)簡(jiǎn)單、起動(dòng)轉(zhuǎn)矩大、可靠性高、調(diào)速范圍廣等特點(diǎn)[1-5],被成功應(yīng)用于電動(dòng)汽車(chē)、高速生產(chǎn)設(shè)備等產(chǎn)品領(lǐng)域。但是SRM具有強(qiáng)非線性、大轉(zhuǎn)矩脈動(dòng)的缺點(diǎn),難以實(shí)現(xiàn)高性能控制,從而限制了其在高性能需求場(chǎng)合的推廣應(yīng)用。
轉(zhuǎn)矩脈動(dòng)嚴(yán)重阻礙SRM的高性能控制,因此轉(zhuǎn)矩脈動(dòng)抑制是SRM研究的一個(gè)關(guān)鍵問(wèn)題。SRM轉(zhuǎn)矩脈動(dòng)抑制方法主要包括電機(jī)優(yōu)化設(shè)計(jì)和有效控制方法。目前,SRM轉(zhuǎn)矩脈動(dòng)抑制的控制方法主要有三類:基于轉(zhuǎn)矩分配函數(shù)的控制方法[6-9]、直接轉(zhuǎn)矩控制方法[10-13]、智能控制方法[14-15]。SRM控制系統(tǒng)主要采用不對(duì)稱半橋拓?fù)潋?qū)動(dòng)電路結(jié)構(gòu)的轉(zhuǎn)矩脈動(dòng)抑制控制方法。若采用三相全橋拓?fù)浣Y(jié)構(gòu)作為功率驅(qū)動(dòng)電路,可以直接選擇變頻器作為驅(qū)動(dòng)器,將極大地降低SRM控制系統(tǒng)的開(kāi)發(fā)周期和開(kāi)發(fā)成本。為此,文獻(xiàn)[16]分析了三相全橋式SRM 的等效電路模型及其靜態(tài)特性;文獻(xiàn)[17]研究了三相不對(duì)稱半橋與三相全橋作為功率變換器的控制策略,但只進(jìn)行了仿真分析而沒(méi)有進(jìn)行樣機(jī)的實(shí)驗(yàn)驗(yàn)證;文獻(xiàn)[18]提出了三相全橋式SRM的轉(zhuǎn)速、電流雙閉環(huán)控制策略,并將固定導(dǎo)通角更改為變角斬波控制,然而該控制策略未考慮轉(zhuǎn)矩脈動(dòng)的問(wèn)題。文獻(xiàn)[19]分析了每相自感和兩相互感在電動(dòng)機(jī)運(yùn)行中產(chǎn)生電磁轉(zhuǎn)矩的情況, 根據(jù)其變化規(guī)律, 推導(dǎo)出獨(dú)特的720°電角度一周期的對(duì)稱不均勻勵(lì)磁方式,使磁阻電動(dòng)機(jī)獲得了良好的運(yùn)行效果,但未對(duì)三相全橋式SRM的轉(zhuǎn)矩模型進(jìn)行推導(dǎo)及分析;文獻(xiàn)[20]討論兩相同步勵(lì)磁驅(qū)動(dòng)模式對(duì)三相全橋式SRM轉(zhuǎn)矩波動(dòng)抑制的影響。目前,基于三相全橋式SRM的轉(zhuǎn)矩脈動(dòng)抑制方法研究已見(jiàn)報(bào)道,但僅進(jìn)行了仿真驗(yàn)證,缺乏系統(tǒng)深入的研究。
為了解決SRM轉(zhuǎn)矩脈動(dòng)大的問(wèn)題并降低其開(kāi)發(fā)成本和開(kāi)發(fā)周期,本文采用轉(zhuǎn)矩分配函數(shù)控制方法,研究三相全橋式SRM的轉(zhuǎn)矩脈動(dòng)抑制。推導(dǎo)三相全橋式SRM的控制邏輯和轉(zhuǎn)矩模型,采用轉(zhuǎn)矩分配函數(shù)的控制方法構(gòu)建三相全橋式SRM轉(zhuǎn)矩脈動(dòng)抑制控制系統(tǒng),為驗(yàn)證方法的有效性,對(duì)控制系統(tǒng)進(jìn)行實(shí)驗(yàn)研究。
1 三相全橋式SRM控制系統(tǒng)
1.1 三相全橋驅(qū)動(dòng)電路及其控制邏輯
三相全橋式SRM的功率驅(qū)動(dòng)電路采用三相全橋拓?fù)浣Y(jié)構(gòu),繞組連接方式采用Y型連接,其驅(qū)動(dòng)電路如圖1所示,其繞組連接方式如圖2所示。
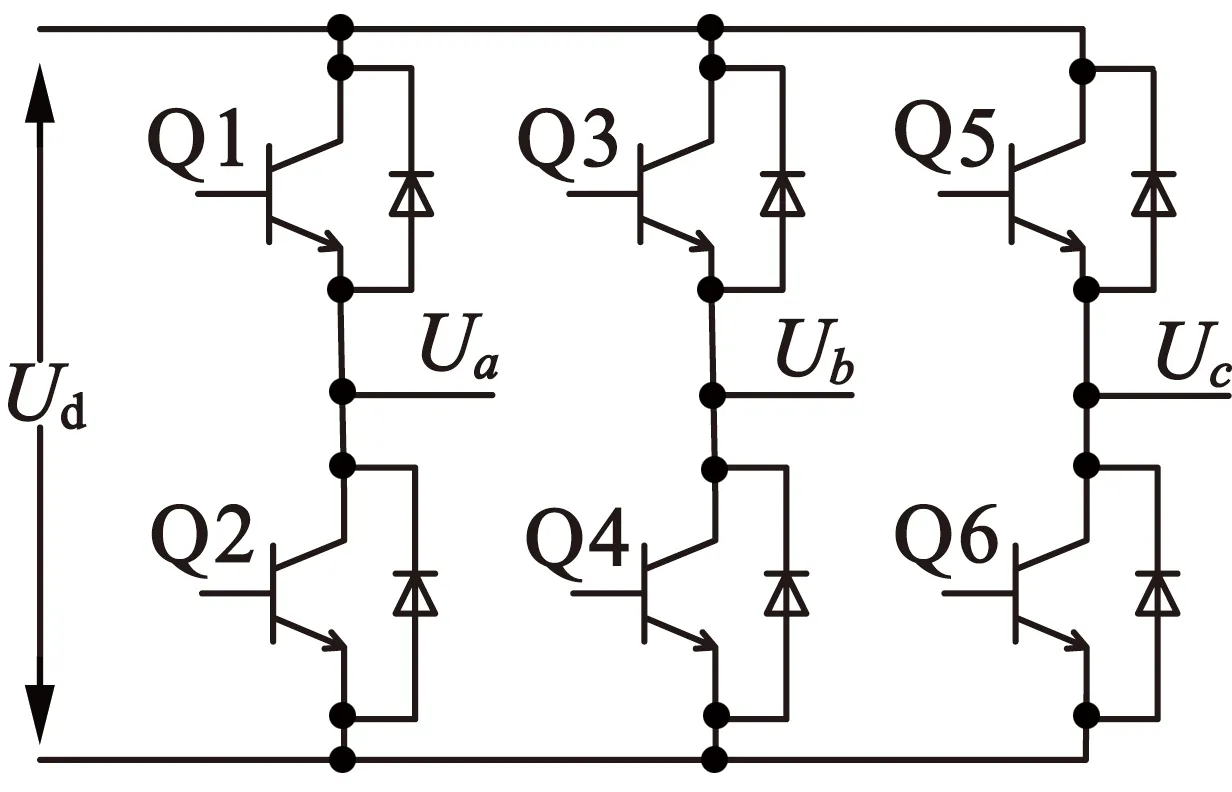
圖1 三相全橋功率驅(qū)動(dòng)電路
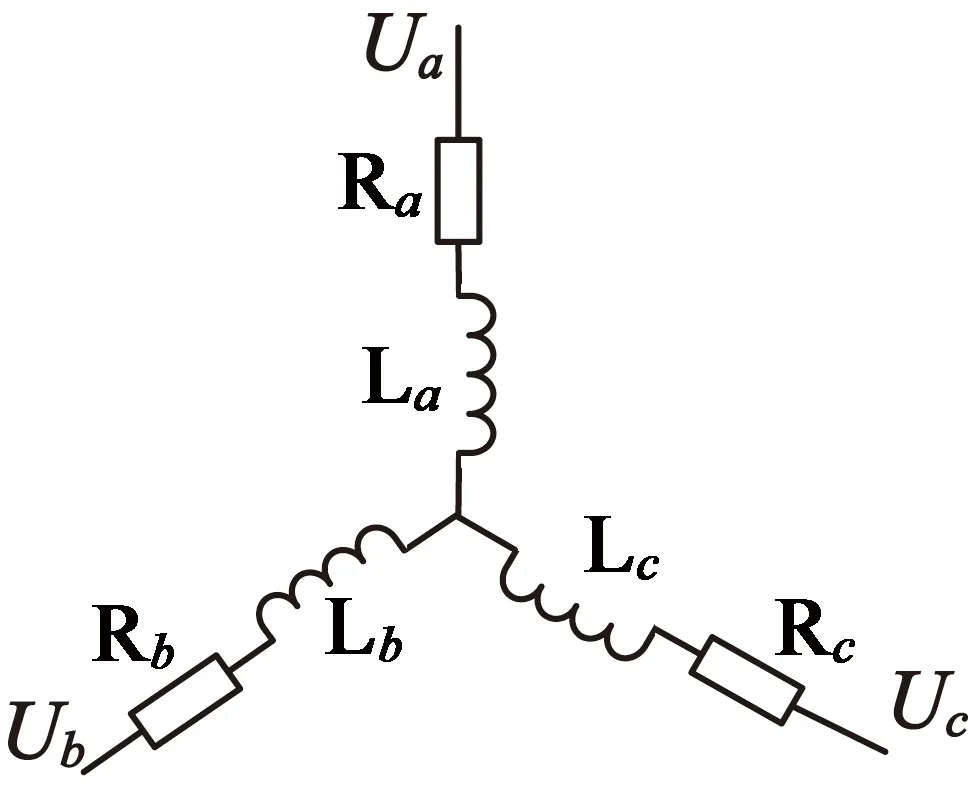
圖2 Y型繞組接法
圖2中,Q1至Q6為三相上下橋臂的6個(gè)開(kāi)關(guān)管;Ud為直流母線電壓;Ua,Ub和Uc為三相繞組的電壓;Ra,Rb和Rc為三相繞組的電阻;La,Lb和Lc為三相繞組的電感。
SRM的線性轉(zhuǎn)矩表達(dá)式如下:
(1)
式中:Tem為電磁轉(zhuǎn)矩;i為繞組電流;L為繞組電感;θ為機(jī)械角度。
由式(1)可知,為了使電機(jī)產(chǎn)生正轉(zhuǎn)矩,則需要通過(guò)6個(gè)開(kāi)關(guān)管控制的三相電流產(chǎn)生于電感的上升區(qū),即在不同的機(jī)械轉(zhuǎn)角區(qū)間切換不同的相繞組導(dǎo)通狀態(tài)。
本文以12/8極電機(jī)為例進(jìn)行分析。對(duì)于12/8極電機(jī)而言,一個(gè)機(jī)械角度周期為45°,若定義ab相電感疊加值為L(zhǎng)ab,同理定義Lbc和Lca,且令使Lab最小的機(jī)械轉(zhuǎn)角為0,則在通電電流為1 A的情況下,Lab,Lbc和Lca在機(jī)械角度上的分布曲線如圖3所示。
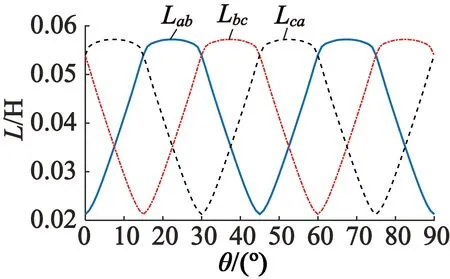
圖3 串聯(lián)相電感在機(jī)械角度上的分布
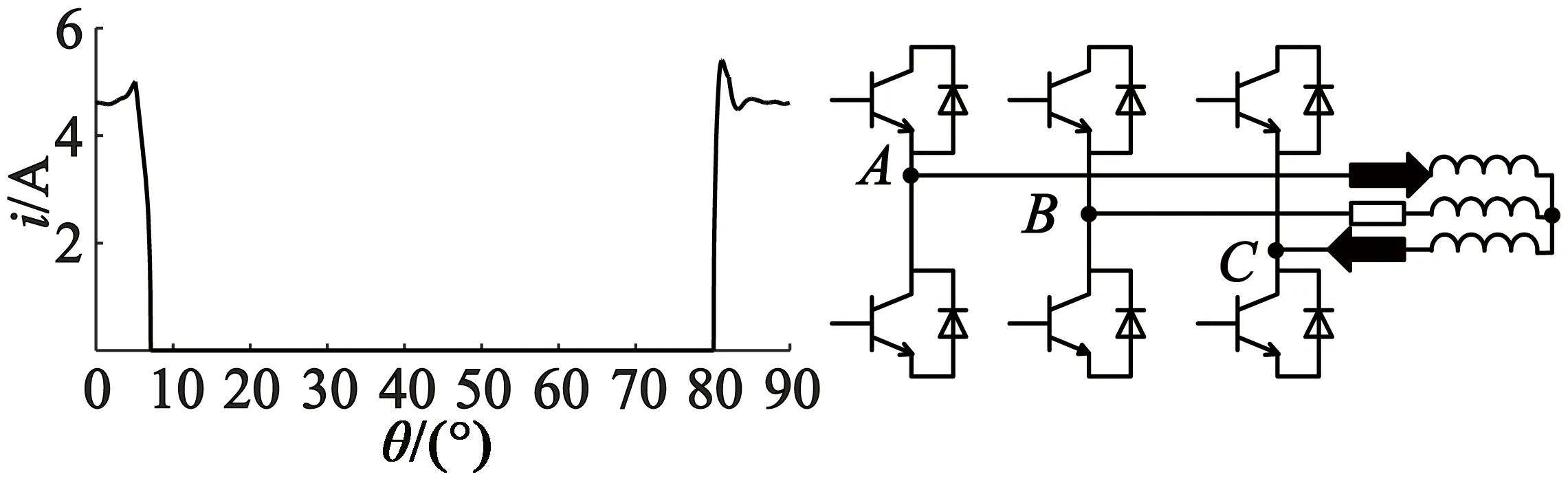
三相全橋驅(qū)動(dòng)電路的控制在換相區(qū)間存在上下橋臂同時(shí)導(dǎo)通的可能性,為了避開(kāi)這種情況,可以增加換相的死區(qū)或者改變控制邏輯,而增加死區(qū)不利于相電流的控制,故采用如圖4所示的控制邏輯,1個(gè)電角度周期對(duì)應(yīng)了2個(gè)機(jī)械角度周期。在圖4中,箭頭表示電流的方向,圖4(a)~圖4(f)表示一個(gè)電角度周期內(nèi)的6個(gè)控制邏輯。

(a) ab相勵(lì)磁電流方向及其與機(jī)械角度的關(guān)系
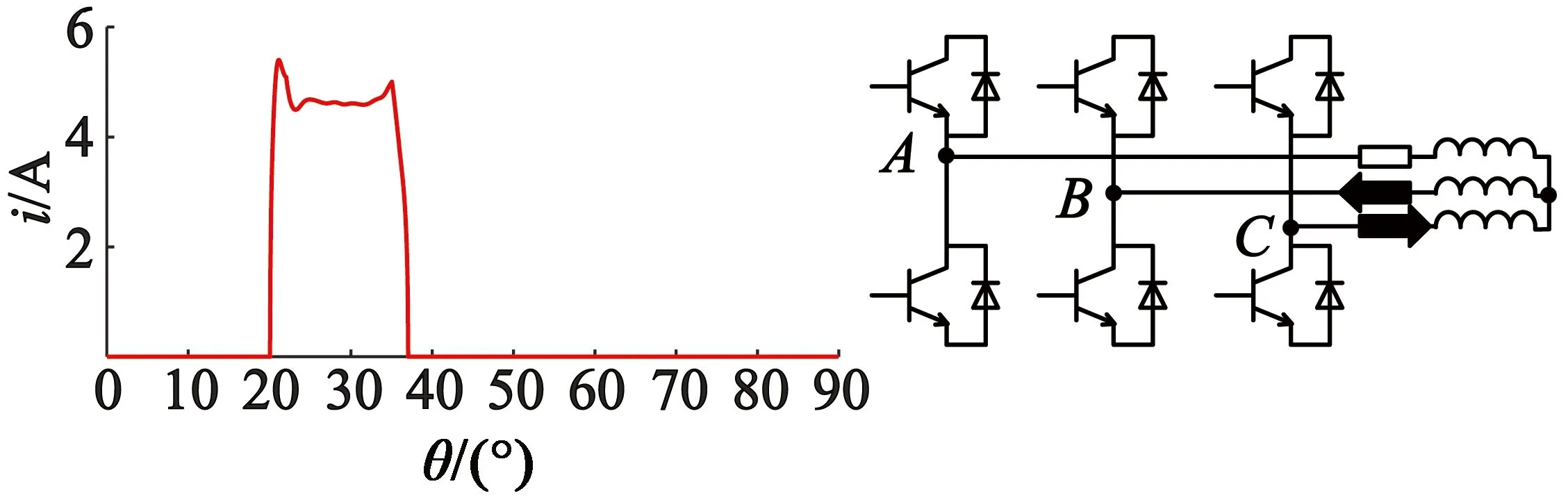
(b) bc相勵(lì)磁電流方向及其與機(jī)械角度的關(guān)系
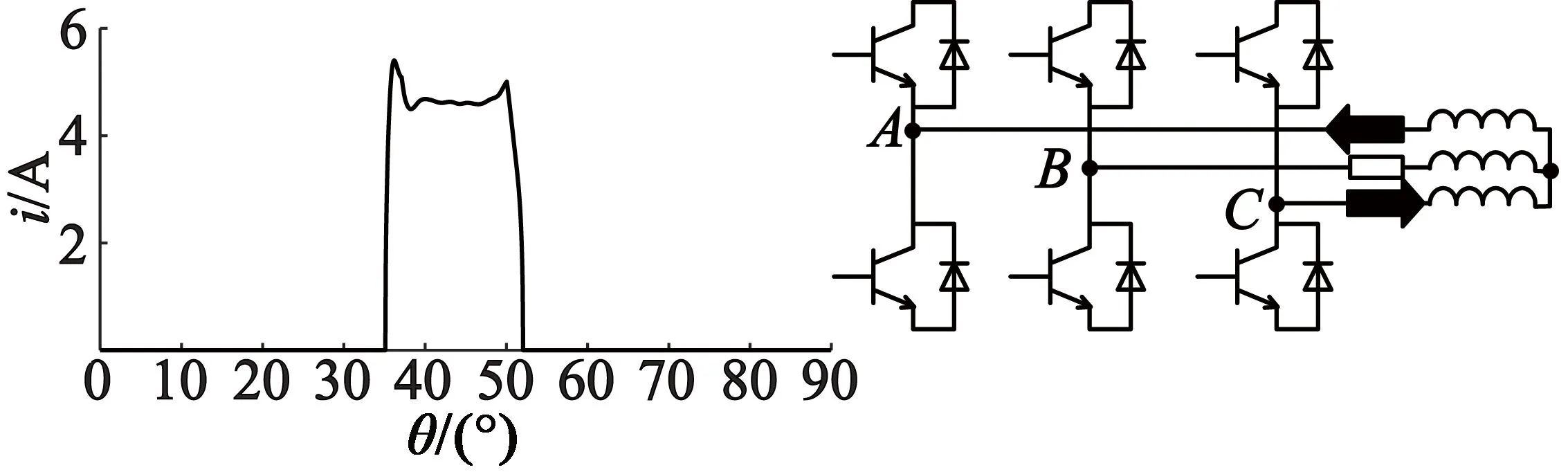
(c) ca相勵(lì)磁電流方向及其與機(jī)械角度的關(guān)系
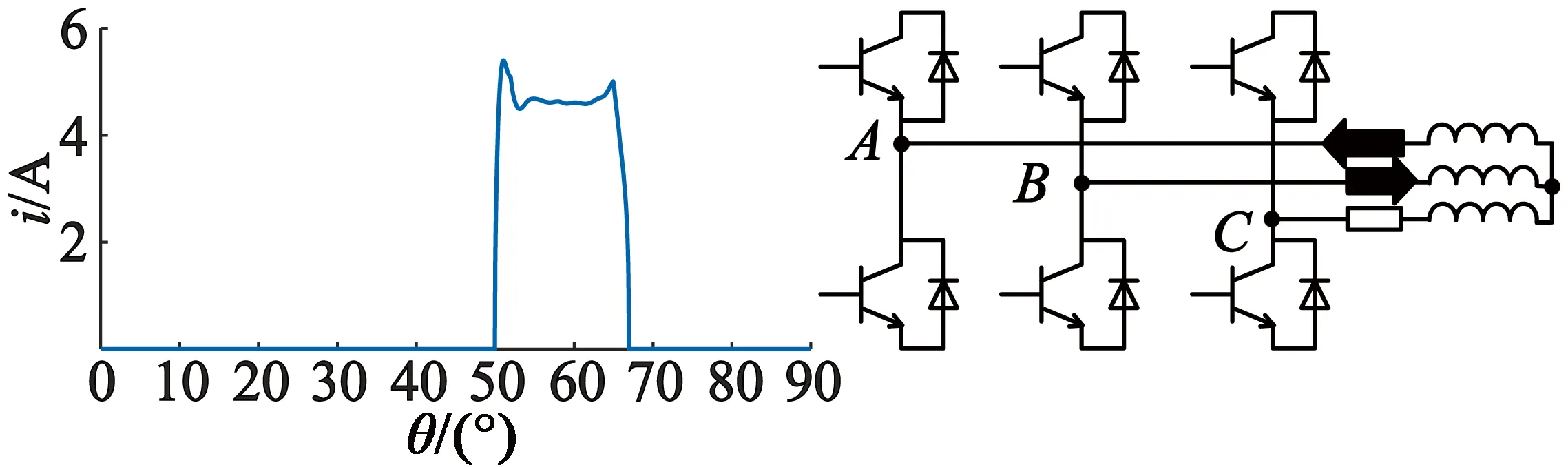
(d) ab相勵(lì)磁電流方向及其與機(jī)械角度的關(guān)系
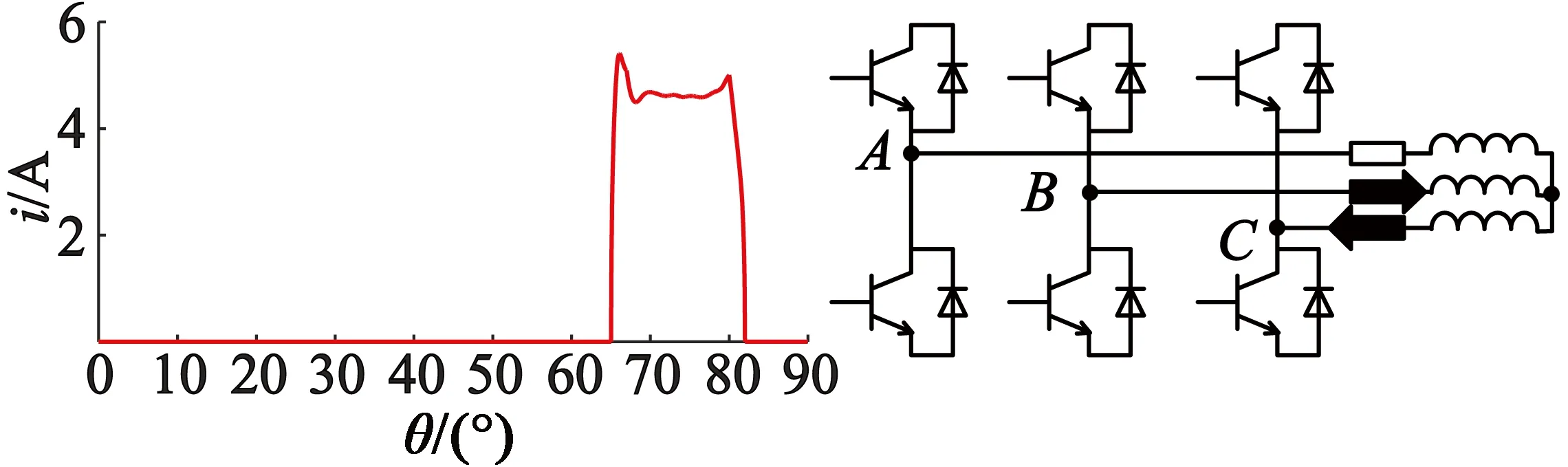
(e) bc相勵(lì)磁電流方向及其與機(jī)械角度的關(guān)系
(f) ca相勵(lì)磁電流方向及其與機(jī)械角度的關(guān)系
在圖4的控制邏輯中,避免了在換相時(shí)上下橋臂開(kāi)關(guān)管同時(shí)導(dǎo)通的情況,且能夠在電感的上升區(qū)對(duì)相應(yīng)的兩相進(jìn)行串聯(lián)勵(lì)磁,從而使電機(jī)產(chǎn)生正轉(zhuǎn)矩。
應(yīng)當(dāng)指出,在整個(gè)控制周期中,至少有兩相同時(shí)導(dǎo)通。在兩個(gè)控制邏輯的過(guò)渡區(qū)間,即換相區(qū)間存在三相同時(shí)導(dǎo)通的情況,這種情況無(wú)法避免,為了使電機(jī)轉(zhuǎn)矩脈動(dòng)盡可能減小,則需對(duì)三相電壓電流同時(shí)加以控制。為了方便下文對(duì)轉(zhuǎn)矩分配控制策略的分析,定義三相導(dǎo)通的過(guò)渡區(qū)間為換相區(qū)。根據(jù)圖4的導(dǎo)通邏輯,串聯(lián)導(dǎo)通區(qū)間和換相區(qū)間的劃分如圖5所示。
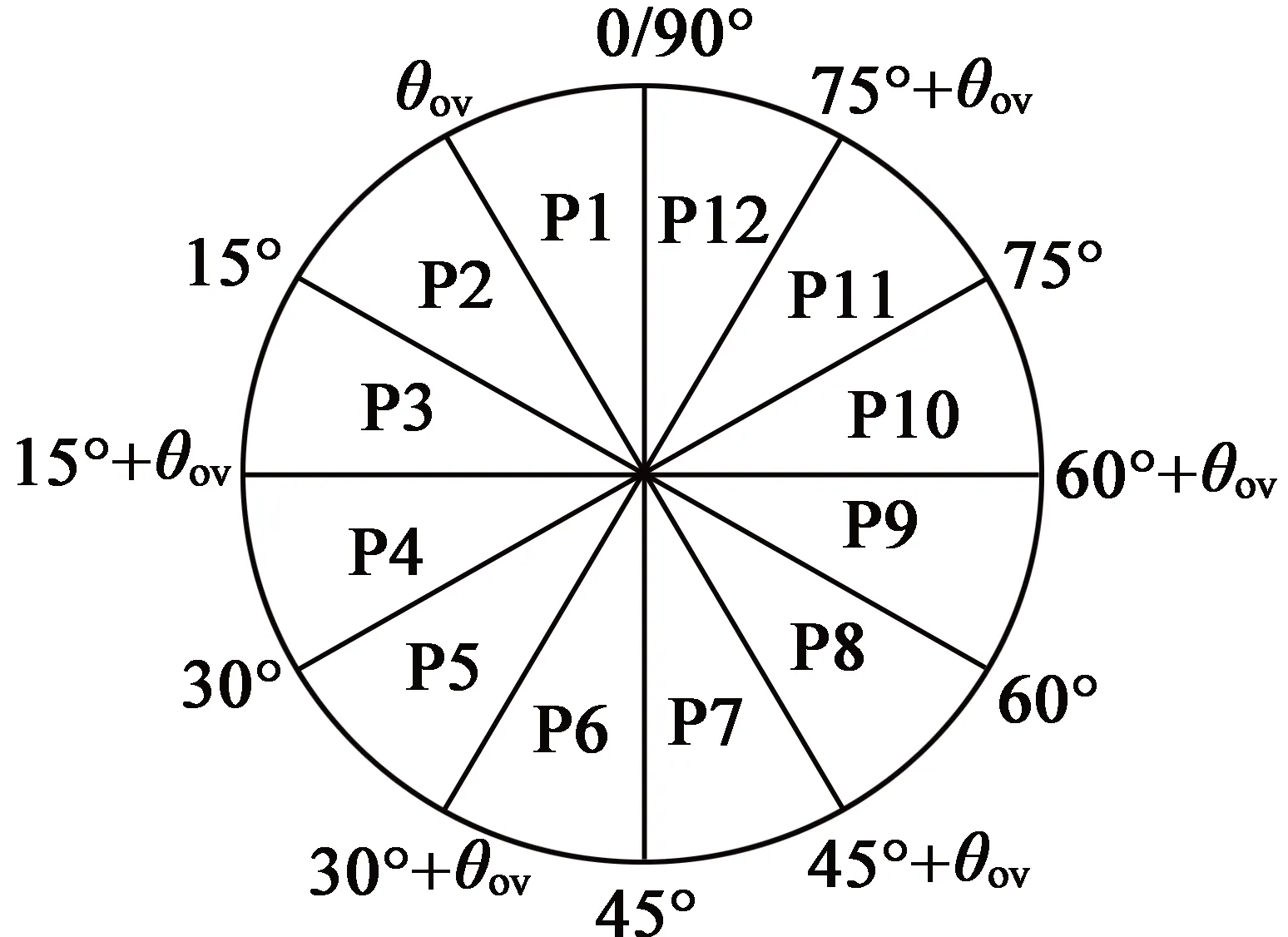
圖5 串聯(lián)導(dǎo)通區(qū)間和換相區(qū)間
在圖5中,0~90°為兩個(gè)機(jī)械角度周期,θov為換相區(qū)間的長(zhǎng)度,P1至P12為導(dǎo)通邏輯的不同狀態(tài)。為了方便下文對(duì)這12個(gè)區(qū)間的電流及轉(zhuǎn)矩進(jìn)行分析,對(duì)各區(qū)間的導(dǎo)通狀態(tài)、電流狀態(tài)及串聯(lián)相電流值進(jìn)行定義,如表1所示。
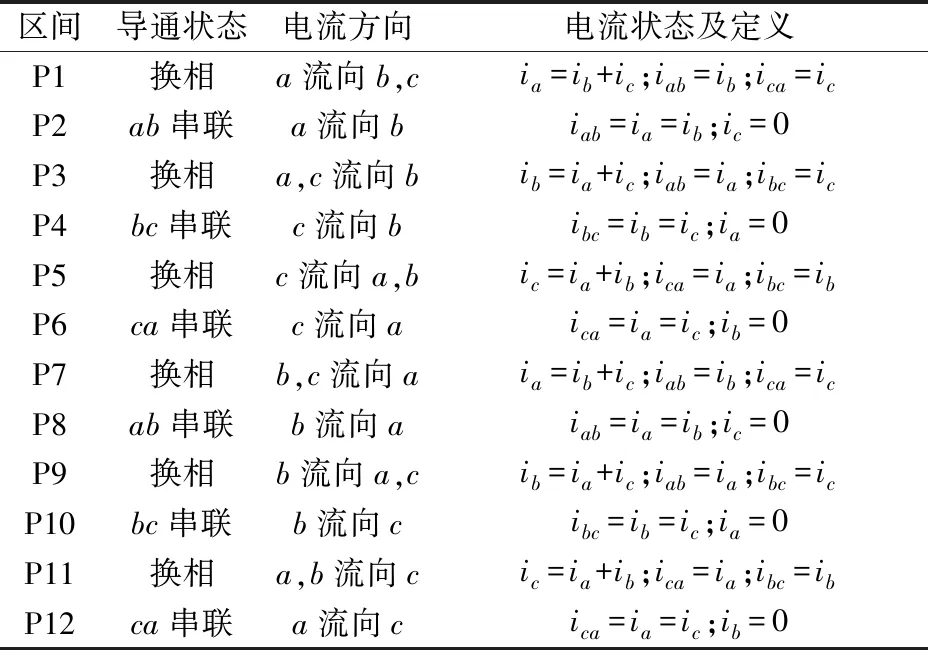
表1 P1至P12區(qū)間的狀態(tài)及定義
傳統(tǒng)的SRM驅(qū)動(dòng)電路采用不對(duì)稱半橋,基于不對(duì)稱半橋拓?fù)浣Y(jié)構(gòu)的SRM轉(zhuǎn)矩分配策略只需考慮上一相和下一相的轉(zhuǎn)矩之和為一恒值。而對(duì)于三相全橋式SRM而言,總轉(zhuǎn)矩總是大于上一串聯(lián)導(dǎo)通相和下一串聯(lián)導(dǎo)通相的轉(zhuǎn)矩之和,故不可以直接進(jìn)行轉(zhuǎn)矩分配。在分析轉(zhuǎn)矩分配策略之前,有必要先討論三相全橋式SRM的轉(zhuǎn)矩模型。
1.2 三相全橋式SRM的轉(zhuǎn)矩模型
繞組串聯(lián)后的轉(zhuǎn)矩與單獨(dú)一相繞組所提供的轉(zhuǎn)矩分量有關(guān),而單獨(dú)一相繞組所提供的轉(zhuǎn)矩與其繞組的磁鏈有關(guān)。
對(duì)于SRM而言,其某一相繞組的磁鏈如圖6所示。
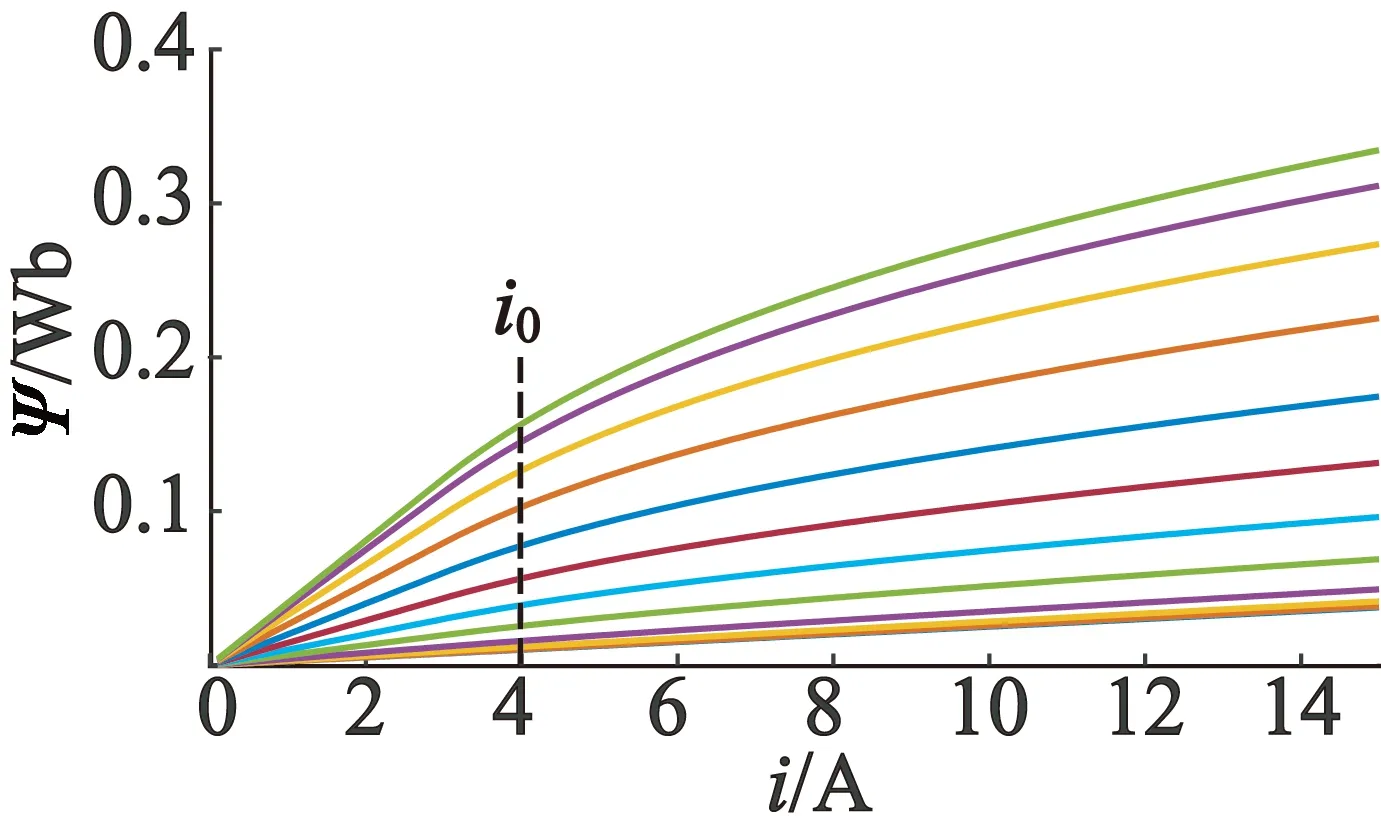
圖6 不同機(jī)械角度的磁鏈-電流曲線
圖6中的多條磁鏈曲線對(duì)應(yīng)著不同的機(jī)械角度,從上而下的磁鏈曲線所對(duì)應(yīng)機(jī)械角度是轉(zhuǎn)子凸極與定子凸極從完全對(duì)齊的機(jī)械角度到完全不對(duì)齊的機(jī)械角度的分布值。由圖6可知,磁鏈與電流的比值即電感是關(guān)于電流的遞減函數(shù),在轉(zhuǎn)折電流i0之前電感幾乎不隨電流變化,在i0之后電感隨電流增大而減小并趨于最小電感值;同時(shí)電感也是關(guān)于角度的某一周期函數(shù),因此可以用式(2)的電感模型來(lái)近似計(jì)算繞組的電感。
(2)
式中:Lk為第k相的繞組電感;pk為某一關(guān)于機(jī)械角度θ的周期函數(shù);Lmin為最小電感值;ik第k相的繞組電流;i0為轉(zhuǎn)折電流。
根據(jù)式(2),可得到磁鏈表達(dá)式:
(3)
由虛功原理可得電磁轉(zhuǎn)矩的表達(dá)式:
(4)
結(jié)合式(3)和式(4)可得到SRM轉(zhuǎn)矩模型如下:
(5)
式中:qk(θ)是與第k相的電感導(dǎo)數(shù)有關(guān)的周期函數(shù),可以通過(guò)實(shí)驗(yàn)測(cè)量不同轉(zhuǎn)角上的繞組電感來(lái)擬合得到。qk(θ)的表達(dá)式:
(6)
根據(jù)表1中P1~P12的定義,結(jié)合式(5),可以得到電磁總轉(zhuǎn)矩在不同區(qū)間的表達(dá)式,如式(7)至式(10)所示。當(dāng)轉(zhuǎn)角處于P2,P8區(qū)間時(shí),即ab相串聯(lián)導(dǎo)通時(shí),有:
式中:Tem表示電磁總轉(zhuǎn)矩,Tab表示ab相串聯(lián)時(shí)產(chǎn)生的轉(zhuǎn)矩分量,Tbc和Tca同理;Ta表示a相獨(dú)立產(chǎn)生的轉(zhuǎn)矩分量,Tb和Tc同理。
當(dāng)轉(zhuǎn)角處于P4,P10區(qū)間時(shí),即bc相串聯(lián)導(dǎo)通時(shí),有:
Tem=Tbc=Tb+Tc=

當(dāng)轉(zhuǎn)角處于P6,P12區(qū)間時(shí),即ca相串聯(lián)導(dǎo)通時(shí),有:
當(dāng)轉(zhuǎn)角處于P1,P7區(qū)間時(shí),即由ca相串聯(lián)導(dǎo)通過(guò)渡到ab相串聯(lián)導(dǎo)通時(shí),此時(shí)三相同時(shí)導(dǎo)通,且ia=ib+ic。為方便分析串聯(lián)相的轉(zhuǎn)矩分配,根據(jù)式(5)、式(7)和式(9),可以將電磁總轉(zhuǎn)矩分解為T(mén)ab,Tca和額外轉(zhuǎn)矩分量Tp,其表達(dá)式:
Tem=Ta+Tb+Tc=Tab+Tca+Tp(10)
式中:Tp為在P1,P7區(qū)間的表達(dá)式分以下幾種情況:
當(dāng)iab+ica≤i0時(shí),有:
Tp=2qaiabica(11)
當(dāng)iab+ica>i0且iab,ica≤i0時(shí),有:
(12)
當(dāng)iab>i0且ica≤i0時(shí),有:
Tp=qaica(2i0-ica)(13)
當(dāng)ica>i0且iab≤i0時(shí),有:
Tp=qaiab(2i0-iab)(14)
當(dāng)iab>i0且ica>i0時(shí),有:
(15)
根據(jù)式(10),同理可得到當(dāng)轉(zhuǎn)角處于P3,P5,P9,P11區(qū)間時(shí)的電磁總轉(zhuǎn)矩Tem。
根據(jù)P1至P12區(qū)間的Tem表達(dá)式即轉(zhuǎn)矩模型可知,為了減小SRM運(yùn)行過(guò)程的轉(zhuǎn)矩脈動(dòng),在串聯(lián)導(dǎo)通區(qū)間可以直接對(duì)串聯(lián)相轉(zhuǎn)矩分量加以控制,在換相區(qū)間可以先計(jì)算出(Tem-Tp)后對(duì)前后的串聯(lián)相轉(zhuǎn)矩分量進(jìn)行轉(zhuǎn)矩分配。
1.3 控制系統(tǒng)結(jié)構(gòu)
通過(guò)控制邏輯和轉(zhuǎn)矩模型的分析,可設(shè)計(jì)出SRM的控制系統(tǒng),三相全橋式SRM轉(zhuǎn)矩分配控制系統(tǒng)框圖如圖7所示。
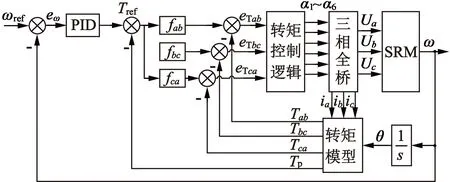
圖7 SRM控制系統(tǒng)框圖
在圖7中,θ表示電機(jī)轉(zhuǎn)角;ω表示實(shí)際轉(zhuǎn)速;ωref表示期望轉(zhuǎn)速;eω表示轉(zhuǎn)速誤差;Tref表示期望轉(zhuǎn)矩;fab表示ab串聯(lián)相轉(zhuǎn)矩的分配函數(shù);fbc表示bc串聯(lián)相轉(zhuǎn)矩的分配函數(shù);fca表示ca串聯(lián)相轉(zhuǎn)矩的分配函數(shù);Tab表示ab相串聯(lián)導(dǎo)通產(chǎn)生的轉(zhuǎn)矩;Tbc表示bc相串聯(lián)導(dǎo)通產(chǎn)生的轉(zhuǎn)矩;Tca表示ca相串聯(lián)導(dǎo)通產(chǎn)生的轉(zhuǎn)矩;Tp表示換相區(qū)間的額外轉(zhuǎn)矩分量;eTab,eTbc和eTca分別表示各串聯(lián)相產(chǎn)生的轉(zhuǎn)矩與分配函數(shù)轉(zhuǎn)矩的誤差;α1至α6分別表示6個(gè)開(kāi)關(guān)管Q1至Q6的PWM占空比;Ua,Ub和Uc為三相繞組電壓。
三相全橋式SRM轉(zhuǎn)矩分配控制系統(tǒng)包括轉(zhuǎn)速環(huán)和轉(zhuǎn)矩環(huán),在轉(zhuǎn)速環(huán)中,控制器采用PID控制器;在轉(zhuǎn)矩環(huán)中,將分配函數(shù)轉(zhuǎn)矩與實(shí)際轉(zhuǎn)矩的誤差送入轉(zhuǎn)矩控制器,通過(guò)控制策略得到6個(gè)開(kāi)關(guān)管的PWM占空比,進(jìn)而調(diào)節(jié)三相電壓電流,達(dá)到控制轉(zhuǎn)矩的目的。其中,實(shí)際轉(zhuǎn)矩由轉(zhuǎn)矩模型、轉(zhuǎn)角和三相電流計(jì)算得出。
2 轉(zhuǎn)矩分配函數(shù)與控制策略
2.1 轉(zhuǎn)矩分配函數(shù)
通過(guò)對(duì)樣機(jī)的數(shù)據(jù)測(cè)量及擬合,可得到轉(zhuǎn)矩特性。圖8是12/8極SRM在ab相串聯(lián)導(dǎo)通時(shí)測(cè)量得到的Tab轉(zhuǎn)矩特性,Tbc和Tca可由Tab分別左右平移15°機(jī)械角度得到。
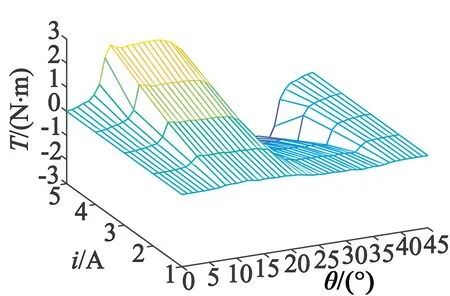
圖8 轉(zhuǎn)矩-電流-機(jī)械角度特性
為了使總轉(zhuǎn)矩Tem能夠跟蹤期望轉(zhuǎn)矩Tref,故引入轉(zhuǎn)矩分配函數(shù)fab(θ),fbc(θ)和fca(θ),在不同的轉(zhuǎn)角區(qū)間分別對(duì)Tab,Tbc和Tca進(jìn)行控制。轉(zhuǎn)矩分配函數(shù)需滿足如下條件:
fab(θ)+fbc(θ)+fca(θ)≡1(16)
0≤fab(θ)≤1(17)
0≤fbc(θ)≤1(18)
0≤fca(θ)≤1(19)
本文采用的是余弦轉(zhuǎn)矩分配函數(shù),轉(zhuǎn)矩分配函數(shù)如圖9所示,根據(jù)轉(zhuǎn)矩分配函數(shù)可以得到不同的機(jī)械角度上的轉(zhuǎn)矩分配系數(shù)。
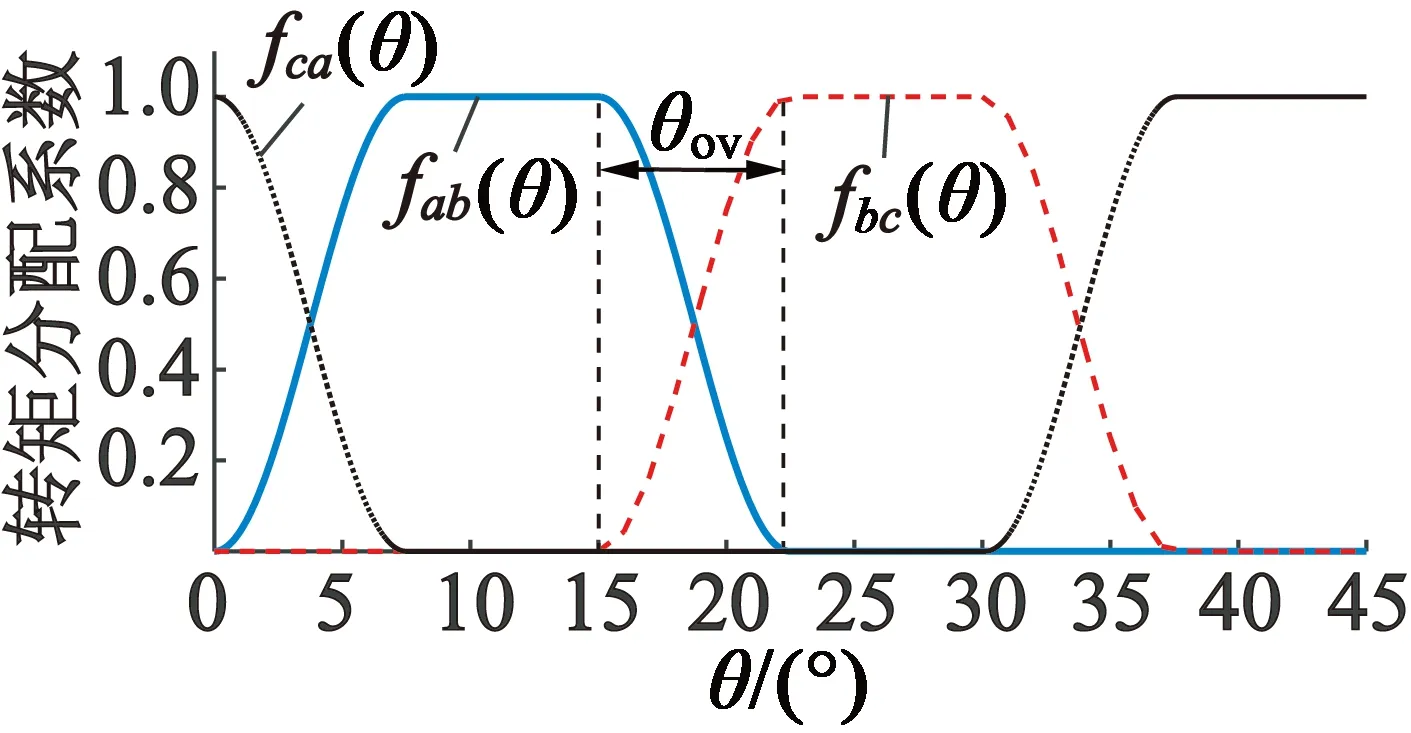
圖9 余弦轉(zhuǎn)矩分配曲線
在圖9中,θov表示換相區(qū)間的長(zhǎng)度。因?yàn)棣萢b,θbc和θca的區(qū)間長(zhǎng)度是22.5°,且兩兩交集,區(qū)間長(zhǎng)度是7.5°,所以決定了換相區(qū)間不能大于7.5°,故12/8極SRM在設(shè)計(jì)余弦轉(zhuǎn)矩分配函數(shù)時(shí)需要滿足如下條件:
0≤θov≤7.5°
(20)
圖9的余弦轉(zhuǎn)矩分配函數(shù)的表達(dá)式如下:
(21)
fbc(θ)=fab(θ-15°)(22)
fca(θ)=fbc(θ-15°)(23)
2.2 轉(zhuǎn)矩控制策略
根據(jù)上述分析,轉(zhuǎn)矩的控制實(shí)質(zhì)上是對(duì)三相繞組的電流進(jìn)行控制,對(duì)在不同的機(jī)械角度時(shí)轉(zhuǎn)矩Tab,Tbc和Tca加以控制,使得電磁總轉(zhuǎn)矩Tem趨于期望轉(zhuǎn)矩Tref。因此需要根據(jù)三相采樣電流ia,ib,ic和機(jī)械角度θ,由SRM轉(zhuǎn)矩模型計(jì)算出當(dāng)前轉(zhuǎn)矩Tab,Tbc和Tca,再由轉(zhuǎn)矩分配函數(shù)得到各轉(zhuǎn)矩誤差eTab,eTbc和eTca,并根據(jù)轉(zhuǎn)矩誤差通過(guò)6個(gè)開(kāi)關(guān)管Q1~Q6對(duì)Tab,Tbc和Tca進(jìn)行控制。其中,轉(zhuǎn)矩模型可由離線測(cè)量數(shù)據(jù)計(jì)算得到,如圖8所示。
由表1可知,兩相導(dǎo)通區(qū)間需要控制2個(gè)開(kāi)關(guān)管,換相區(qū)間需要控制3個(gè)開(kāi)關(guān)管。不同區(qū)間使用不同開(kāi)關(guān)信號(hào)將導(dǎo)致三相電流變化的不同,電流變化直接影響轉(zhuǎn)矩的變化。
當(dāng)轉(zhuǎn)角處于兩相導(dǎo)通區(qū)間時(shí),以P2區(qū)間為例,根據(jù)圖1的三相全橋驅(qū)動(dòng)電路,當(dāng)Q1和Q4同時(shí)導(dǎo)通時(shí),串聯(lián)相a,b的繞組兩端電壓為母線電壓Ud即正電壓導(dǎo)通模式,電流ia和ib將上升;當(dāng)Q1和Q4一通一斷時(shí),由于二極管的續(xù)流作用,串聯(lián)相a,b的繞組兩端電壓為0,即零電壓續(xù)流模式,電流將下降;當(dāng)Q1和Q4同時(shí)關(guān)斷時(shí),由于二極管的續(xù)流作用,串聯(lián)相a,b的繞組兩端電壓為-Ud,即負(fù)電壓續(xù)流模式,電流較前者將更快地下降。
因此,在兩相導(dǎo)通區(qū)間即P2區(qū)間,為了更快速調(diào)節(jié)電流的變化,可用同一開(kāi)關(guān)信號(hào)驅(qū)動(dòng)2個(gè)開(kāi)關(guān)管來(lái)控制串聯(lián)相的電流,即ia或ib,從而控制Tab,即2個(gè)開(kāi)關(guān)管工作于正電壓導(dǎo)通模式或者負(fù)電壓續(xù)流模式,如表2所示。開(kāi)關(guān)信號(hào)采取PWM,控制方式采用PI控制律,由轉(zhuǎn)矩誤差計(jì)算PWM的占空比,計(jì)算式由式(24)~式(27)給出。
(24)
eTab=Treffab-Tab(25)
eTbc=Treffbc-Tbc(26)
eTca=Treffca-Tca(27)
式中:Tref為參考轉(zhuǎn)矩;fab,fbc和fca表示轉(zhuǎn)矩分配函數(shù);Tab,Tbc和Tca表示由轉(zhuǎn)矩模型計(jì)算得到的實(shí)際轉(zhuǎn)矩;eT(k)表示第k個(gè)控制周期對(duì)應(yīng)的轉(zhuǎn)矩誤差,由表2給出;α(k+1)表示第k+1個(gè)控制周期所需的占空比;Kp和Ki表示PI控制律的控制參數(shù)。
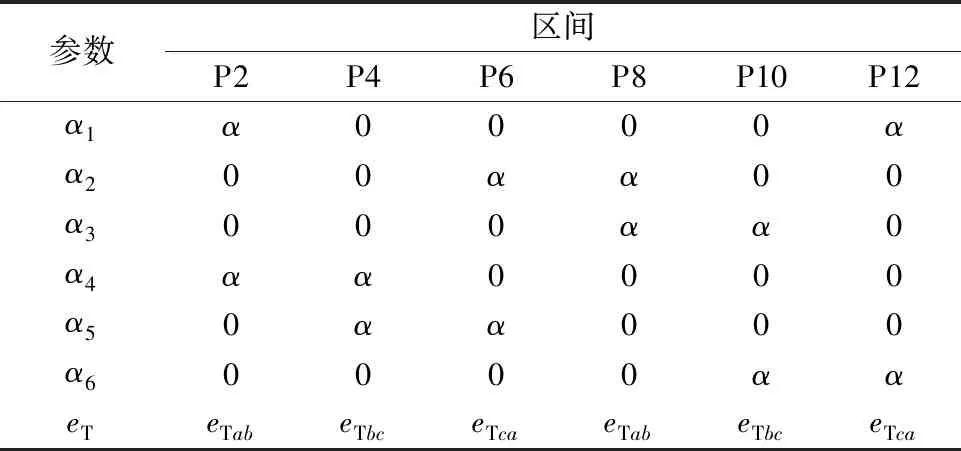
表2 串聯(lián)導(dǎo)通區(qū)間的控制參數(shù)
當(dāng)轉(zhuǎn)角處于換相區(qū)間時(shí),以P3區(qū)間為例,有8種導(dǎo)通狀態(tài)。當(dāng)Q1,Q4和Q5同時(shí)導(dǎo)通時(shí),串聯(lián)相a,b的繞組兩處于正電壓導(dǎo)通模式,串聯(lián)相b,c也處于正電壓導(dǎo)通模式,電流ia和ic將上升;當(dāng)Q4和Q5同時(shí)導(dǎo)通而Q1關(guān)斷時(shí),串聯(lián)相a,b處于零電壓續(xù)流模式,串聯(lián)相b,c處于正電壓導(dǎo)通模式,電流ia將下降而ic將上升;當(dāng)Q1和Q4同時(shí)導(dǎo)通而Q5關(guān)斷時(shí),串聯(lián)相a,b處于正電壓導(dǎo)通模式,串聯(lián)相b,c處于零電壓續(xù)流模式,電流ia將上升而ic將下降;當(dāng)Q4導(dǎo)通而Q1和Q5同時(shí)關(guān)斷時(shí),串聯(lián)相a,b處于零電壓續(xù)流模式,串聯(lián)相b,c也處于零電壓續(xù)流模式,電流ia和ic將下降;同理當(dāng)Q1和Q5同時(shí)導(dǎo)通而Q4關(guān)斷時(shí),電流ia和ic將下降,當(dāng)Q1導(dǎo)通而Q4和Q5同時(shí)關(guān)斷時(shí),串聯(lián)相a,b處于零電壓續(xù)流模式,串聯(lián)相b,c處于負(fù)電壓續(xù)流模式,電流ia將下降而ic將快速下降;當(dāng)Q5導(dǎo)通而Q1和Q4同時(shí)關(guān)斷時(shí),串聯(lián)相a,b處于負(fù)電壓續(xù)流模式,串聯(lián)相b,c處于零電壓續(xù)流模式,電流ia將快速下降而ic將下降;當(dāng)Q1,Q4和Q5同時(shí)關(guān)斷時(shí),串聯(lián)相a,b處于負(fù)電壓續(xù)流模式,串聯(lián)相b,c也處于負(fù)電壓續(xù)流模式,電流ia,ic將快速下降。
因此,為了使上一個(gè)串聯(lián)導(dǎo)通相的電流衰減而下一個(gè)串聯(lián)導(dǎo)通相的電流上升,可以通過(guò)調(diào)節(jié)Q1的PWM占空比來(lái)控制ia從而控制Tab;通過(guò)調(diào)節(jié)Q5的PWM占空比來(lái)控制ic從而控制Tab;而Q4的開(kāi)通和關(guān)斷可以根據(jù)上一個(gè)串聯(lián)導(dǎo)通相的轉(zhuǎn)矩分量即Tab的大小來(lái)決策。當(dāng)Tab不能夠快速下降時(shí),即與期望值的差大于允許誤差Th時(shí),關(guān)斷Q4,使得上一串聯(lián)相處于負(fù)電壓工作狀態(tài),從而使ia和Tab快速下降。應(yīng)當(dāng)指出,關(guān)斷Q4將使得ic和Tbc無(wú)法上升,在換相區(qū)間將無(wú)法避免地產(chǎn)生轉(zhuǎn)矩脈動(dòng),因此應(yīng)使得Q4關(guān)斷的時(shí)間盡量小,故可以減小換相區(qū)間大小θov和增大允許誤差Th,但過(guò)小的θov會(huì)導(dǎo)致電流無(wú)法短時(shí)間下降至目標(biāo)值,而過(guò)大的Th將使上一個(gè)串聯(lián)相轉(zhuǎn)矩?zé)o法精確跟隨期望值而產(chǎn)生一定轉(zhuǎn)矩脈動(dòng),故θov和Th大小應(yīng)該根據(jù)負(fù)載和轉(zhuǎn)速折衷地選取。
根據(jù)上述分析,表3給出了換相區(qū)間的開(kāi)關(guān)管控制參數(shù),式(28)~式(30)給出了表3中控制參數(shù)的計(jì)算方法,其中PWM的占空比采用的是PI控制律。
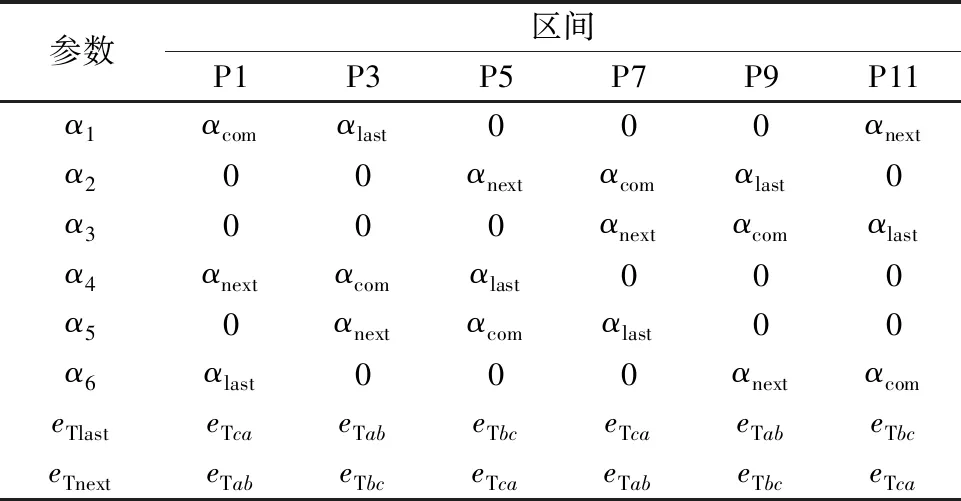
表3 換相區(qū)間的控制參數(shù)
(28)


式中:αlast(k),αnext(k)和αcom(k)表示第k個(gè)控制周期的上一個(gè)串聯(lián)相開(kāi)關(guān)管的占空比、下一個(gè)串聯(lián)相開(kāi)關(guān)管的占空比和兩個(gè)串聯(lián)相共用開(kāi)關(guān)管的占空比;Kp和Ki表示PI控制律的控制參數(shù);eTlast和eTnext表示了上一個(gè)串聯(lián)相轉(zhuǎn)矩和下一個(gè)串聯(lián)相轉(zhuǎn)矩的誤差大小,Th表示了上一個(gè)串聯(lián)相轉(zhuǎn)矩的允許誤差。
通過(guò)上述的轉(zhuǎn)矩控制策略,可以使電機(jī)轉(zhuǎn)矩在不同轉(zhuǎn)角區(qū)間跟隨轉(zhuǎn)矩分配函數(shù),從而達(dá)到減小轉(zhuǎn)矩脈動(dòng)的效果。
3 實(shí)驗(yàn)驗(yàn)證
控制系統(tǒng)實(shí)驗(yàn)平臺(tái)如圖10所示,采用一臺(tái)標(biāo)稱功率1.1kW的三相12/8極SRM,采用三相全橋拓?fù)浣Y(jié)構(gòu)的功率驅(qū)動(dòng)電路,利用2 048線光電碼盤(pán)作為轉(zhuǎn)子位置傳感器,運(yùn)用TMS320F28069M型DSP芯片作為控制器。
控制系統(tǒng)框圖如圖7所示。驅(qū)動(dòng)電路的母線電壓為300V,開(kāi)關(guān)管的驅(qū)動(dòng)信號(hào)采用30kHz的PWM信號(hào),轉(zhuǎn)矩環(huán)的控制周期為20μs,轉(zhuǎn)速環(huán)的控制周期為1ms,換相區(qū)長(zhǎng)度θov取1°,允許誤差Th取0.3N·m。
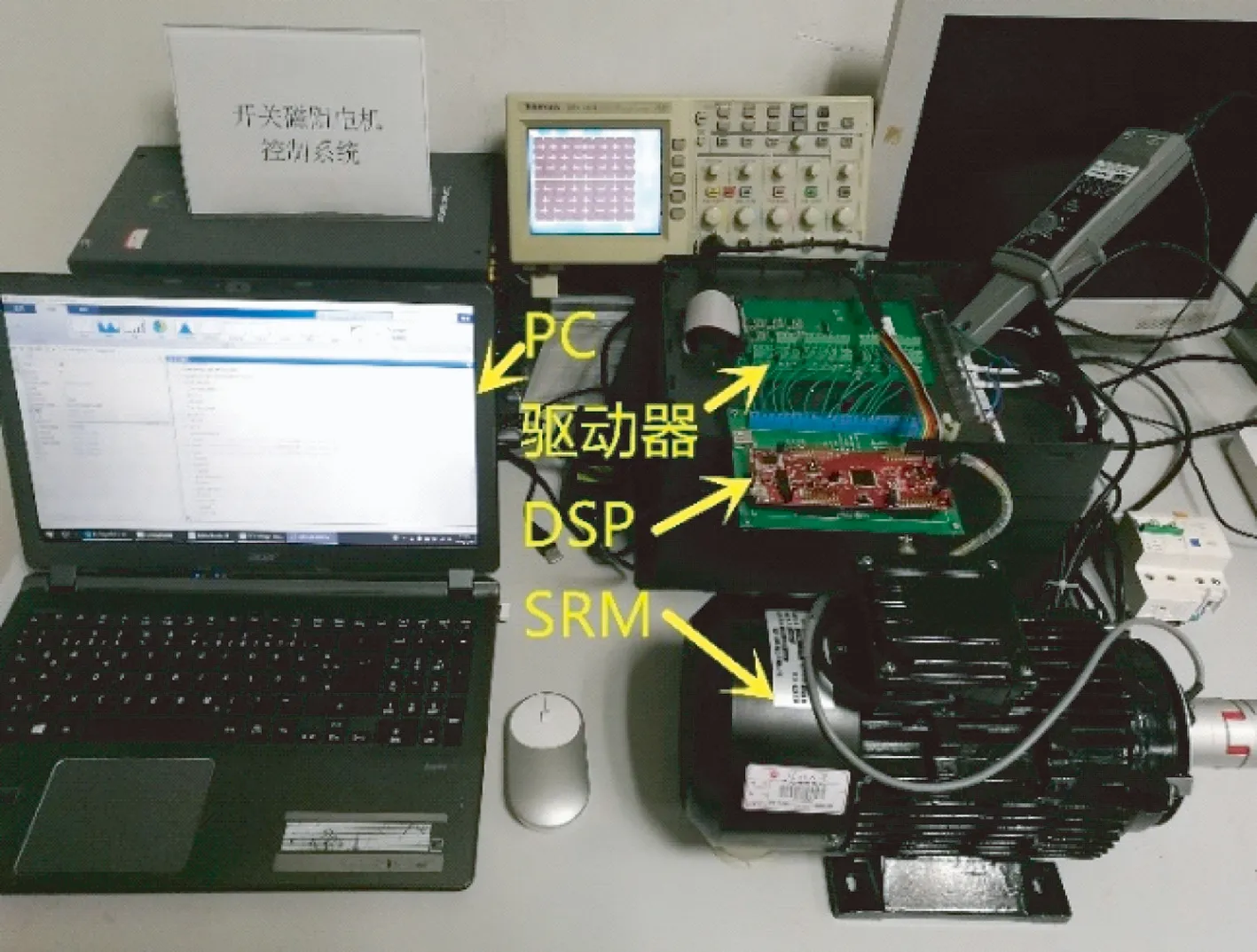
圖10 控制系統(tǒng)實(shí)驗(yàn)平臺(tái)
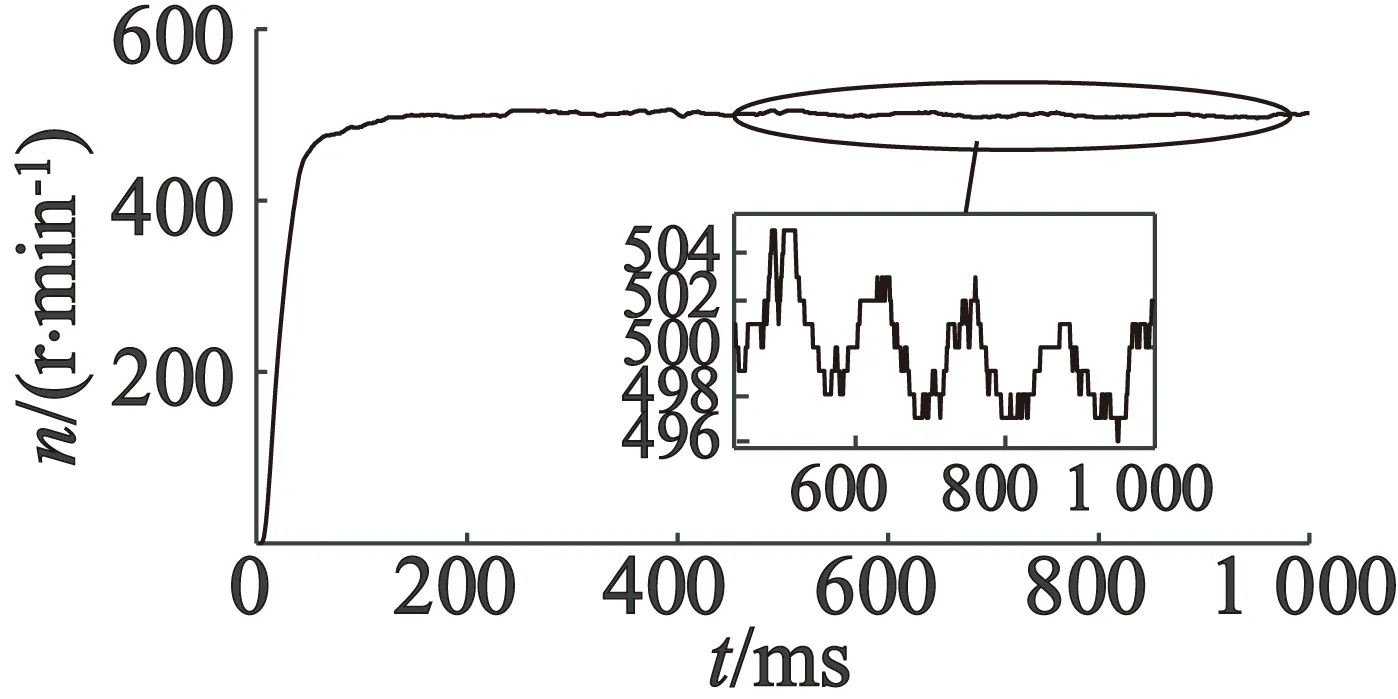
采用本文的轉(zhuǎn)矩分配函數(shù)法進(jìn)行實(shí)驗(yàn),當(dāng)期望轉(zhuǎn)速為500r/min時(shí),其轉(zhuǎn)速波形、a相電流波形、轉(zhuǎn)矩波形如圖11所示。

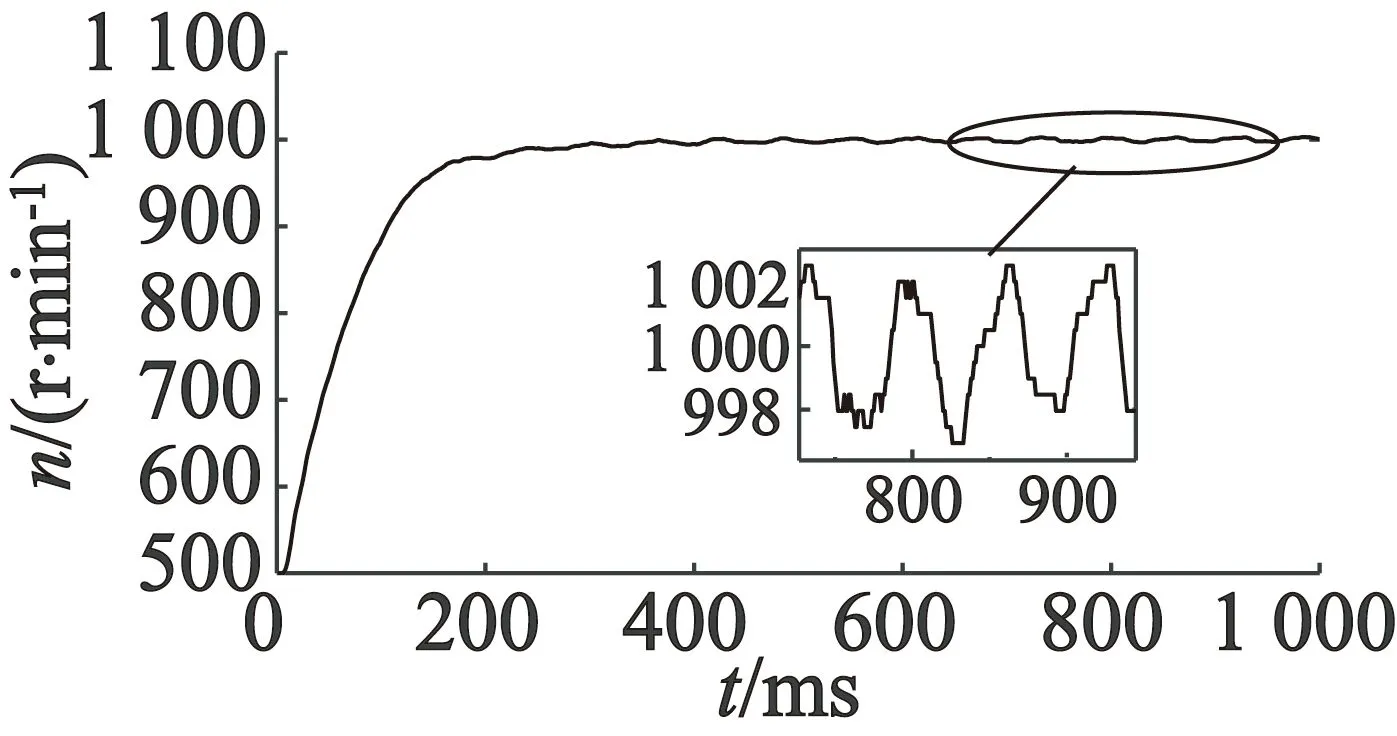
(a) 轉(zhuǎn)速波形

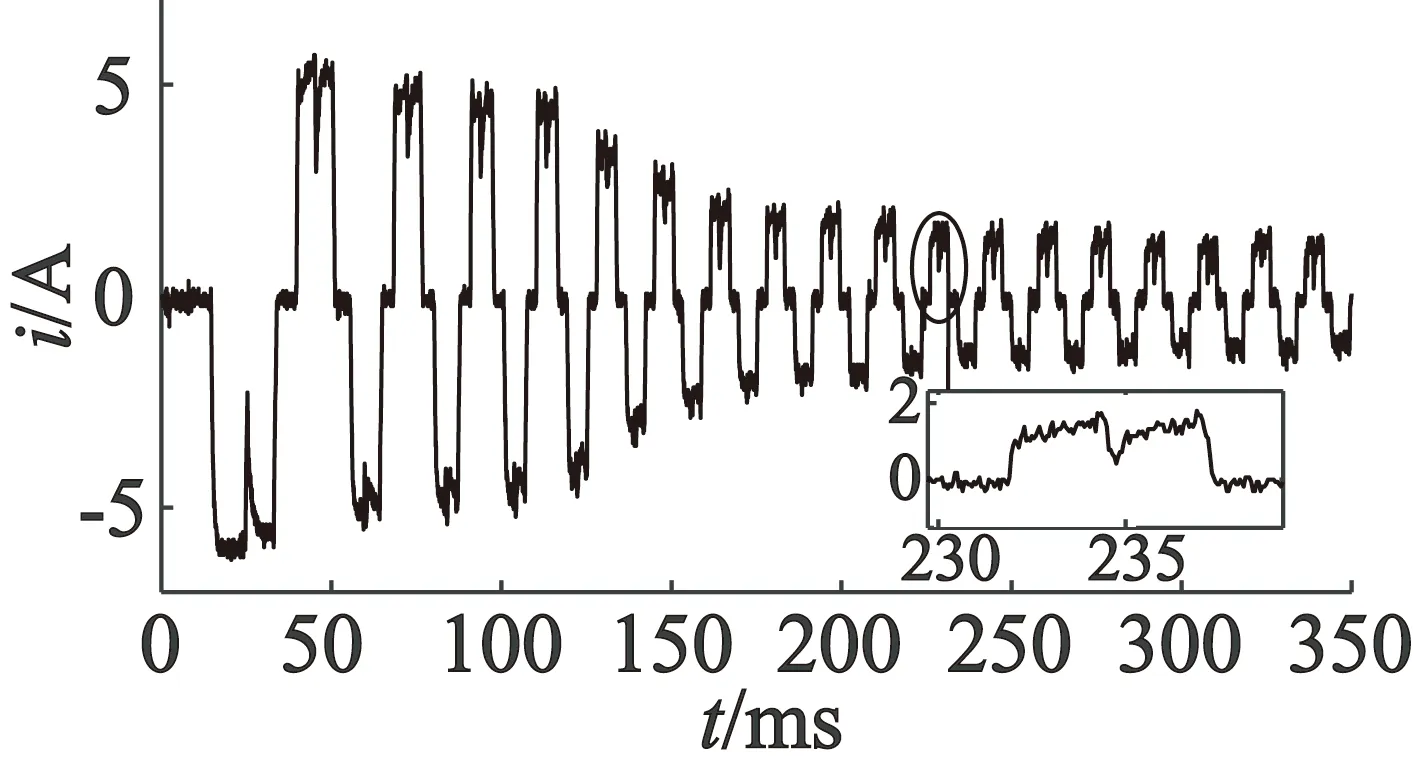
(b) a相電流波形
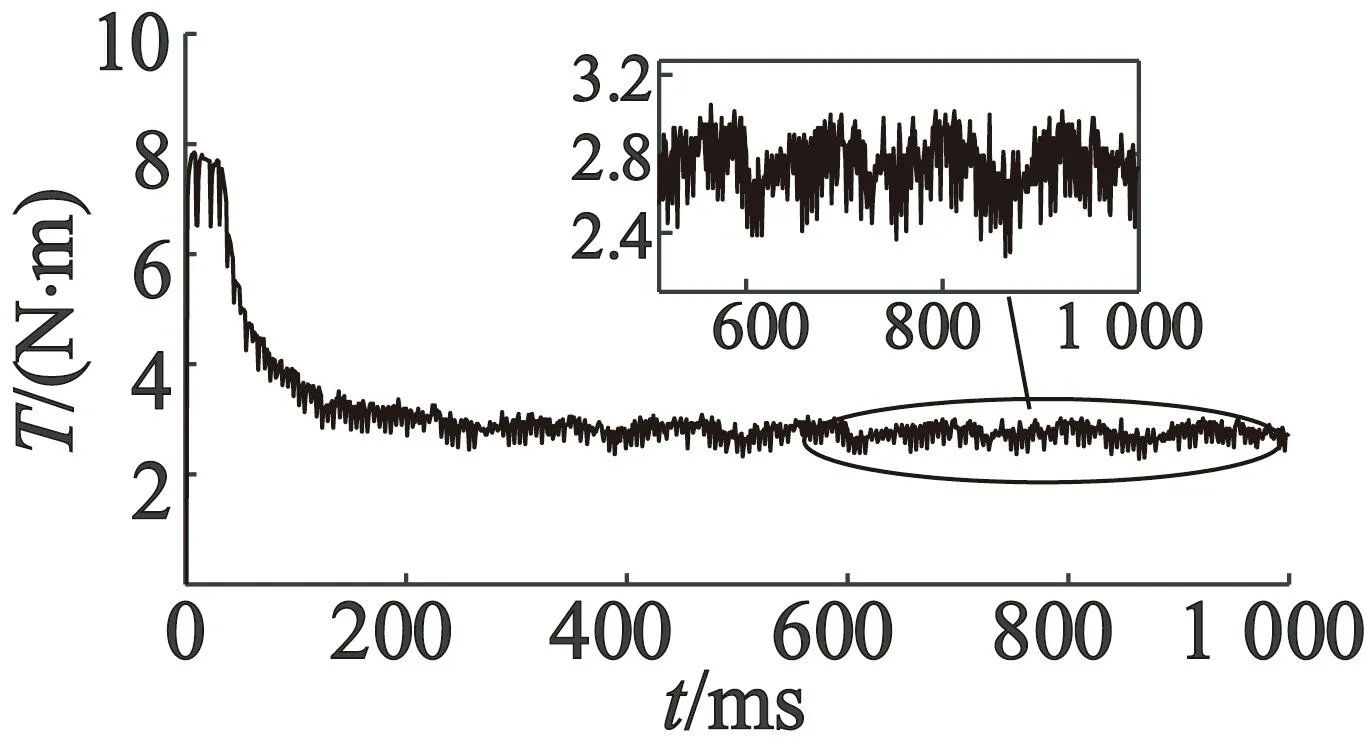
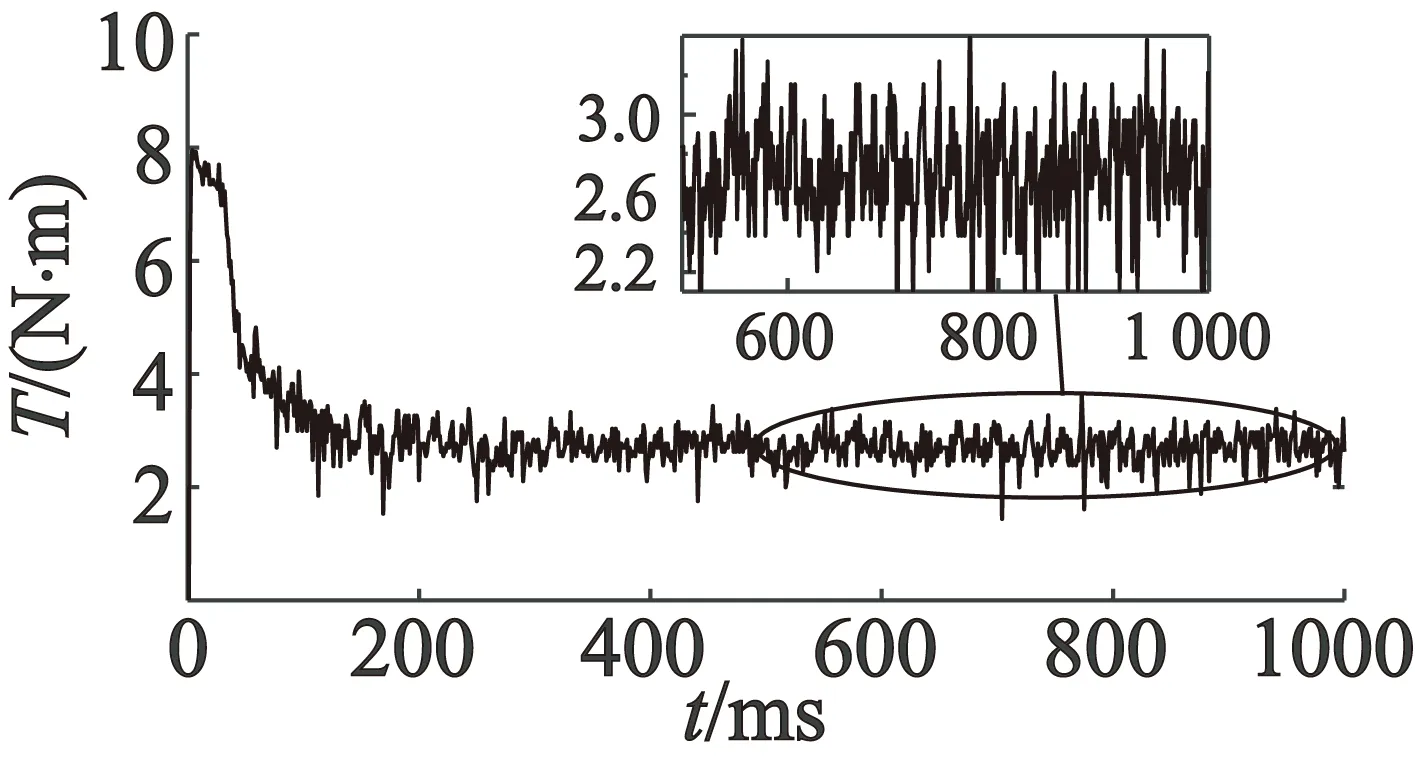
(c) 轉(zhuǎn)矩波形
文獻(xiàn)[20]采用直接瞬時(shí)轉(zhuǎn)矩控制法,而本文采用轉(zhuǎn)矩分配函數(shù)法,為了對(duì)比兩者的控制效果,對(duì)文獻(xiàn)[20]的方法進(jìn)行實(shí)驗(yàn),當(dāng)期望轉(zhuǎn)速為500r/min時(shí),其轉(zhuǎn)速波形、a相電流波形、轉(zhuǎn)矩如圖12所示。
(a) 轉(zhuǎn)速波形

(b) a相電流波形
(c) 轉(zhuǎn)矩波形
為了對(duì)比本文方法在不同轉(zhuǎn)速下的控制效果,對(duì)本文方法進(jìn)行實(shí)驗(yàn),當(dāng)期望轉(zhuǎn)速為1 000r/min時(shí),其轉(zhuǎn)速波形、a相電流波形、轉(zhuǎn)矩波形如圖13所示。
(a) 轉(zhuǎn)速波形
(b) a相電流波形
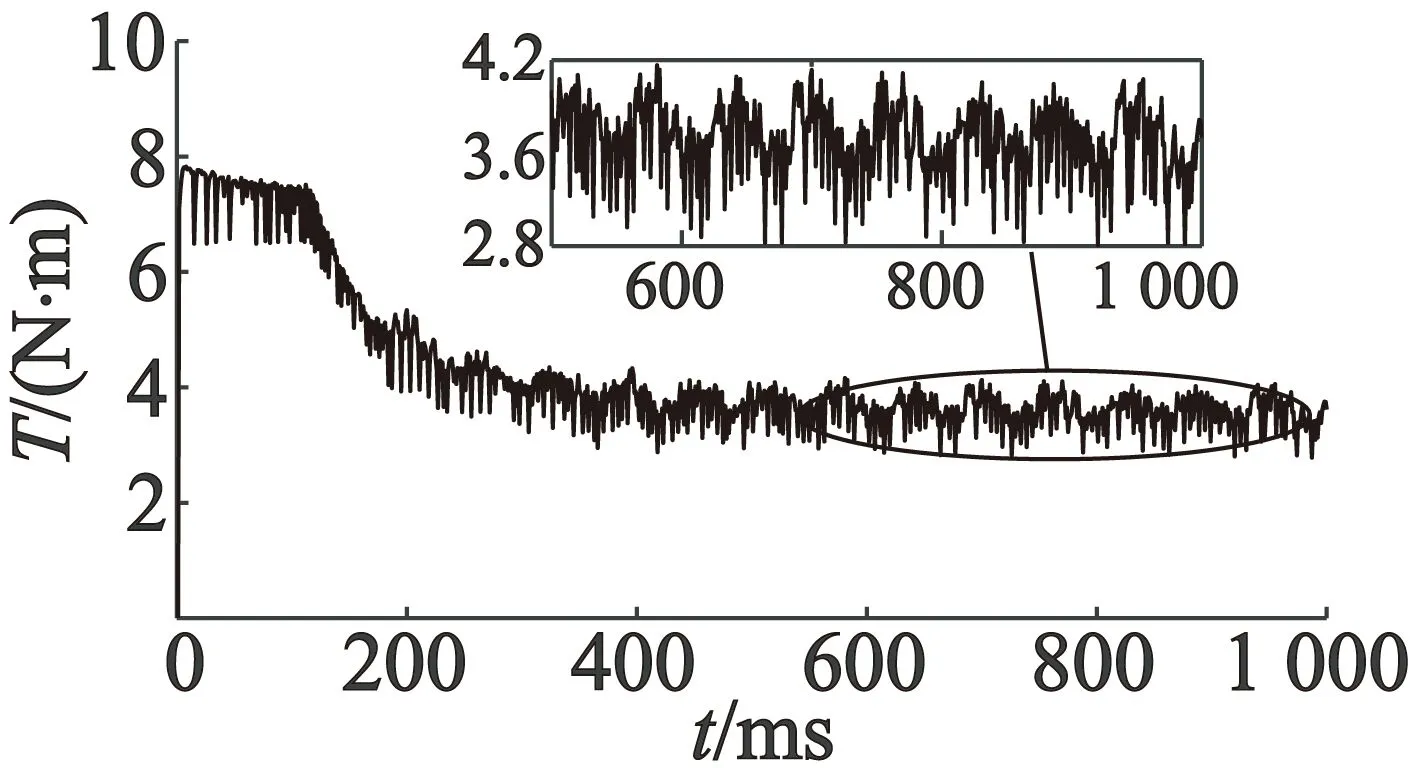
(c) 轉(zhuǎn)矩波形
圖11是期望轉(zhuǎn)速為500r/min的SRM運(yùn)行狀態(tài),其轉(zhuǎn)速調(diào)節(jié)時(shí)間為180ms,轉(zhuǎn)速穩(wěn)態(tài)誤差為±2r/min。當(dāng)轉(zhuǎn)速處于穩(wěn)態(tài)時(shí),其轉(zhuǎn)速相對(duì)誤差小于0.4%,電流峰值為1.1A,轉(zhuǎn)矩平均值為2.7N·m,穩(wěn)態(tài)時(shí)轉(zhuǎn)矩脈動(dòng)為28%。
圖12是采用文獻(xiàn)[20]方法的期望轉(zhuǎn)速為500r/min的SRM運(yùn)行狀態(tài),其轉(zhuǎn)速調(diào)節(jié)時(shí)間為195ms,轉(zhuǎn)速穩(wěn)態(tài)誤差為±6r/min。當(dāng)轉(zhuǎn)速處于穩(wěn)態(tài)時(shí),其轉(zhuǎn)速相對(duì)誤差小于1.2%,電流峰值為1.1A,轉(zhuǎn)矩平均值為2.7N·m,轉(zhuǎn)矩脈動(dòng)為51%。
圖13是期望轉(zhuǎn)速為1 000r/min的SRM運(yùn)行狀態(tài),其轉(zhuǎn)速調(diào)節(jié)時(shí)間為406ms,轉(zhuǎn)速穩(wěn)態(tài)誤差為±4r/min。當(dāng)轉(zhuǎn)速處于穩(wěn)態(tài)時(shí),其轉(zhuǎn)速相對(duì)誤差小于0.4%,電流峰值為1.8A,轉(zhuǎn)矩平均值為3.6N·m,轉(zhuǎn)矩脈動(dòng)為34%。與500r/min的期望轉(zhuǎn)速實(shí)驗(yàn)相比,轉(zhuǎn)矩脈動(dòng)增大,主要是由于在相同的控制參數(shù)作用下轉(zhuǎn)矩脈動(dòng)隨著轉(zhuǎn)速的增大而增大。
根據(jù)上述分析,在換相區(qū)間,當(dāng)前一個(gè)串聯(lián)導(dǎo)通相轉(zhuǎn)矩大于允許誤差Th時(shí),為了使誤差快速減小,將設(shè)定αcom為0,此時(shí)前一個(gè)串聯(lián)導(dǎo)通相處于負(fù)電壓續(xù)流模式,且下一個(gè)串聯(lián)導(dǎo)通相轉(zhuǎn)矩處于零電壓續(xù)流模式,在圖11(b)和圖12(b)中體現(xiàn)在a相電流波形的凹陷現(xiàn)象。
對(duì)比本文方法和文獻(xiàn)[20]方法的控制效果,本文方法在穩(wěn)態(tài)時(shí)的轉(zhuǎn)速誤差和轉(zhuǎn)矩脈動(dòng)都比文獻(xiàn)[20]方法的小,因此,本文方法在抑制轉(zhuǎn)矩脈動(dòng)的效果上優(yōu)于文獻(xiàn)[20]方法。
對(duì)比期望轉(zhuǎn)速為500r/min和期望轉(zhuǎn)速為1 000r/min的控制效果,相同負(fù)載下當(dāng)轉(zhuǎn)速越高時(shí),穩(wěn)態(tài)時(shí)的轉(zhuǎn)速誤差和轉(zhuǎn)矩脈動(dòng)也相應(yīng)增大,增大幅度分別為2r/min和6%,但轉(zhuǎn)速誤差和轉(zhuǎn)矩脈動(dòng)都低于文獻(xiàn)[20]方法的期望轉(zhuǎn)速為500r/min的SRM運(yùn)行狀態(tài)。
根據(jù)上述指標(biāo),該SRM控制系統(tǒng)具有一定的快速性和穩(wěn)態(tài)精度,同時(shí)SRM的轉(zhuǎn)矩脈動(dòng)在一定轉(zhuǎn)速范圍內(nèi)得到了有效的抑制。
4 結(jié) 語(yǔ)
本文研究了一種基于轉(zhuǎn)矩分配函數(shù)的三相全橋式SRM轉(zhuǎn)矩脈動(dòng)抑制方法,并對(duì)其進(jìn)行了實(shí)驗(yàn)研究。實(shí)驗(yàn)結(jié)果表明,當(dāng)轉(zhuǎn)速期望值為500r/min時(shí),穩(wěn)態(tài)時(shí)轉(zhuǎn)速相對(duì)誤差小于0.4%,穩(wěn)態(tài)時(shí)轉(zhuǎn)矩脈動(dòng)為28%,與文獻(xiàn)[20]方法相比,轉(zhuǎn)速相對(duì)誤差降低了0.8%,且轉(zhuǎn)矩脈動(dòng)降低了23%。實(shí)驗(yàn)研究驗(yàn)證了本文方法的有效性。采用本文方法,SRM控制系統(tǒng)可以直接采用變頻器作為功率驅(qū)動(dòng)器,縮短開(kāi)發(fā)周期和開(kāi)發(fā)成本,并有效地降低轉(zhuǎn)矩脈動(dòng),對(duì)SRM的實(shí)際工程應(yīng)用具有參考價(jià)值。
猜你喜歡
天水行政學(xué)院學(xué)報(bào)(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
漢語(yǔ)世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會(huì)主義學(xué)院學(xué)報(bào)(2017年1期)2017-04-16 05:34:07
中國(guó)衛(wèi)生(2014年12期)2014-11-12 13:12:40