
運輸機外伸硬式桁桿系統控制律設計方法研究
2019-04-10 06:40:55顏凱李思潭王磊
科技創新導報 2019年34期
顏凱 李思潭 王磊

摘? ?要:對運輸機上改裝的外伸硬式桁桿系統,提出了一種控制律設計思路。通過風洞試驗與力學分析建立飛機-桁桿系統耦合模型;在此基礎上,通過特征根比對研究桁桿系統對原機飛控系統的影響,并對耦合模型進行降階處理,建立了短周期模態結合桁桿系統運動模態的低階模型;最后結合任務剖面特點,通過內環阻尼器結合外環PI控制進行桁桿系統姿態保持控制律設計,并進行仿真分析。結果表明桁桿系統不影響原機飛控系統正常使用;采用短周期模態結合桁桿系統運動模態的控制模型精度高,滿足控制律設計要求;采用內環阻尼增穩結合外環PI控制的桁桿姿態保持控制的設計方法可行,具有重要理論參考意義。
關鍵詞:硬式桁桿系統? 降階處理? 飛行控制? 姿態保持
中圖分類號:V249? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2019)12(a)-0008-05
Abstract: A kind of control law design method is proposed for the transport aircraft overhanging rigid truss rod system. The coupling model of aircraft and truss rod system is established by the wind tunnel test and mechanical analysis, based on which the influence of the truss rod system on the original flight control system is studied by eigenvalue ratio. And the simplified control model composed of the short-period mode and the motion mode of the truss rod system is established. Finally, the attitude control law design for the truss rod system is achieved by the inner damper combined with the outer PI control according to characteristics of the task profile and the simulation demonstration is conducted, which shows that the truss rod system have little influence on the original aircraft system, and the high accuracy of the control model which is established on the short-period mode combined with the motion mode of the truss rod system is satisfied for the control law design. Therefore, the attitude control law design method which is achieved by the inner damping augmentation with the outer PI control is feasible and has engineering application value.
Key Words:Overhanging rigid truss rod system; Model; Flight control; Attitude keeping control
運輸機改裝外伸硬式桁桿系統能夠滿足很多特殊要求,在科研試飛、軍民用領域均具有很高的應用前景。科研試飛中通過在運輸機上加裝外伸硬式桁桿系統高空噴水,可以創造出滿足要求的結冰試飛環境。軍用方面,在空中加油領域,硬式桁桿系統相比軟式加油具有無可比擬的優勢[1-2]:硬式桁桿相比軟管截面大,輸油速度高,空中加油極大地降低了受油機飛行員操作負擔,因此,硬式加油方式是空中加油技術的發展方向。
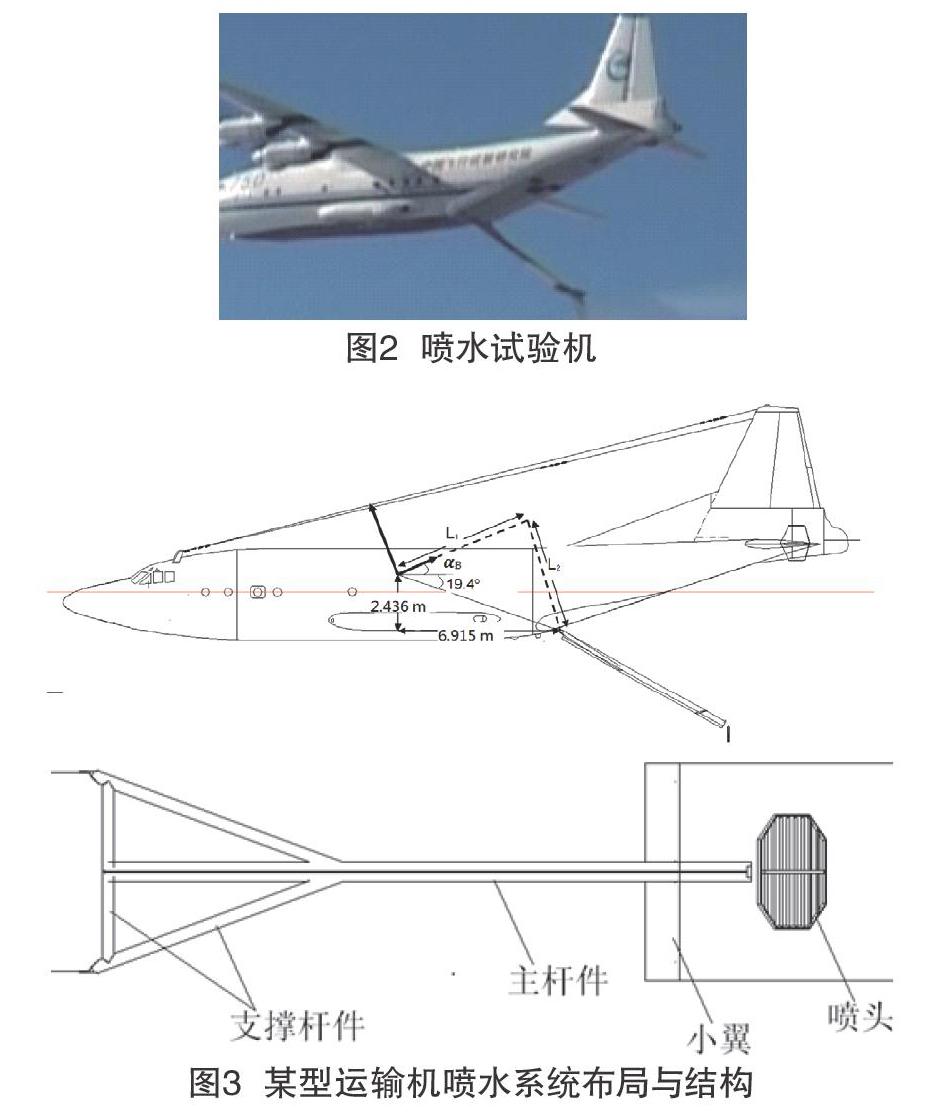
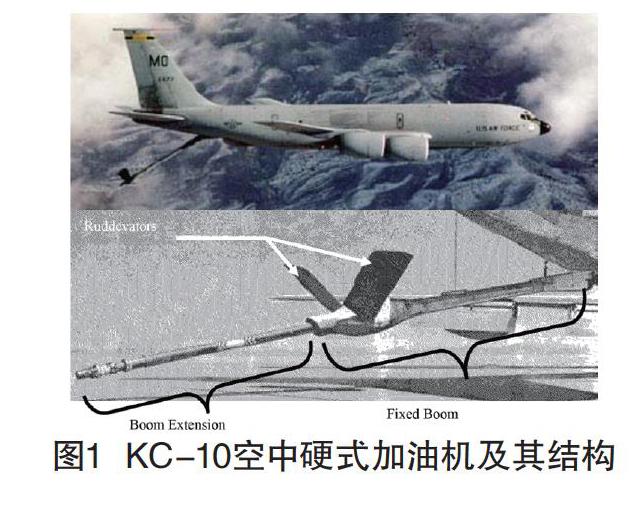
硬式桁桿系統能夠滿足很多特殊功能的需求,但硬式桁桿系統本身對飛行安全將產生不利影響,為保證飛行安全,需要在飛行時精準控制桁桿系統運動。目前國外只有美國成功應用硬式受油技術[2-4],我國在這方面的基礎研究比較少,尚未形成真正的應用。圖1為美國根據DC-10改造的KC-10空中加油機及其硬式桁桿結構,圖2為我國研制的噴水試驗機。
本文以某型飛機噴水系統為研究對象,研究運輸機外伸硬式桁桿系統控制律設計方法。首先通過風洞試驗數據與力學分析建立飛機-桁桿系統耦合模型;在此基礎上研究桁桿系統對原機飛控系統的影響,并對桁桿系統控制模型進行降階處理;最后根據桁桿系統控制模型,結合任務剖面特點,通過內環阻尼增穩控制結合外環PI控制開展桁桿系統姿態保持控制律設計。
1? 桁桿系統動力學模型
以某型運輸機噴水系統為例,如圖3所示,桁桿一端與機身尾部連接,可繞機身尾部沿機體軸俯仰方向轉動,另一端連接噴頭,在桁桿末端設計小翼作為控制舵面。在飛行過程中,通過小翼偏轉產生的力和力矩來驅動桁桿偏轉,調整噴頭至合適的位置進行試驗,本文以該噴水系統開展運輸機外伸硬式桁桿系統控制律設計方法研究。
機體坐標系采用英美坐標系,部件坐標系:坐標原點為桁桿轉軸與桁桿對稱面交點,x、y、z三軸方向與機體坐標系相同。
作用在桁桿上力矩包括重力產生的力矩、桁桿及噴頭氣動力(矩)及小翼的氣動力(矩),其中小翼氣動力矩為控制力矩。桁桿受到的氣動力(矩)與桁桿偏角(桁桿與機身縱軸線的夾角,下偏為正)、飛行速度、迎角等相關。通過風洞試驗,獲得機體坐標系下桁桿系統各個部件氣動力及力矩,通過坐標轉換,獲得桁桿系統在部件坐標系下的氣動力及力矩。圖4為部件坐標系下桁桿系統的升力及俯仰力矩系數風洞試驗結果:在不同桁桿偏角下,桁桿所受的氣動力、力矩隨飛機迎角基本成線性變化,基于此,可采用小擾動線化理論對桁桿系統動力學模型進行線性化處理[5]。
根據動量矩定理,系統控制模型為[3]:
(1)
式中,qs為桁桿在部件坐標系中的俯仰角速度,為桁桿偏角,NR為桁桿系統在部件坐標系中受到的俯仰力矩,包括氣動力矩及桁桿系統重力產生的力矩。
由于桁桿系統受到的氣動力還與桁桿偏角、飛行速度及迎角有關,為使方程組(1)封閉,引入飛機縱向運動方程組,最終飛機-桁桿系統控制模型為:
(2)
其中A、B分別為系統狀態矩陣和控制矩陣,x為系統狀態向量,u為系統控制向量。
,為飛機空速增量,Δα為迎角增量,Δq為飛機俯仰角速度增量,Δθ為飛機俯仰角增量,Δqs為桁桿偏角角速度增量,Δ為桁桿偏角增量,,為飛機升降舵偏度增量,為發動機油門桿偏度增量,為小翼偏度增量。
從公式(2)可以發現,飛機-桁桿控制系統為耦合系統[3-5],桁桿系統狀態量與飛機縱向狀態量耦合,狀態量的增多勢必會導致模型階數的提高,這對桁桿系統控制律設計是非常不利的。本文將以模型(1)為基礎,研究桁桿系統對原機飛控系統的影響、桁桿系統控制模型簡化以及控制律設計。
2? ?飛機-桁桿系統控制律設計
2.1 桁桿系統對原機飛控系統的影響
假定飛機在4000m高度,以400km/h表速做定常直線平飛運動,桁桿偏角40°,系數矩陣為:
耦合系統及原機縱向特征根如下:
表中1為短周期模態,2為長周期模態,3為桁桿系統運動模態。原機縱向短周期、長周期模態特性和飛機-桁桿耦合系統短周期、長期模態特性非常接近,加入桁桿系統后短周期阻尼比增加約4.5%,長周期阻尼比降低3.5%。其阻尼比變化遠沒有飛行過程中飛行狀態改變引起的變化大,加入桁桿系統后并不會對原機飛控系統產生太大影響,原機飛控系統依然可以正常使用。
2.2 桁桿系統控制模型
模型(1)階數高,不利于控制設計,需對控制模型進行降階處理。由于桁桿系統氣動力(矩)與桁桿偏角、飛行速度、迎角、俯仰角速度等有關,迎角的變化顯著影響桁桿系統氣動特性,桁桿系統自身阻尼特性則決定了俯仰角速度對其氣動特性的影響,速度小幅變化對氣動系數影響不大,綜合以上分析,采用短周期模態結合桁桿系統運動模態的等效模型:
降階控制模型特征根見表2,與未降階模型特征根進行比對,對比發現簡化模型短周期模態、桁桿系統運動模態特征根與耦合模型非常接近,短周期模態阻尼比降低3%,桁桿系統運動模態阻尼比降低約1.3%。降階控制模型具有非常高的精度,能夠滿足桁桿系統控制律設計需求。
2.3 桁桿系統控制律設計
分析任務剖面的特點,飛機在指定高度進行定常直線平飛運動,操縱桁桿偏轉到指定的角度開展相關工作,控制律設計目標為:飛行高度保持、飛行速度保持、桁桿偏角保持[6]。飛行高度、速度保持設計原飛控系統已經包含,本文在原飛控基礎上結合模型(5)開展桁桿偏角保持控制律設計[6]。
根據表2的特征根計算發現,桁桿系統為欠阻尼系統,受到擾動后運動發散。為保證系統本身具有良好的阻尼特性,提升系統抗干擾能力,需設計阻尼器增加系統本身的阻尼特性;外環為了實現桁桿偏角保持,需設計桁桿偏角控制回路。綜合以上分析,桁桿偏角保持控制回路如下:
設計驅動小翼偏轉的舵機模型為:
桁桿系統降階模型包含短周期模態,飛控系統中的縱向阻尼器改變了原機短周期模態特性,需引入原機縱向阻尼器,考慮其閉環特性。原機縱向阻尼器為:
式中,Kq為原機俯仰角速度反饋增益系數,Kq=0.995。引入原機縱向阻尼器,桁桿系統本體動力學模型為:
在控制模型(8)中,系統零點-3.0143、-1.4403與極點-3.0220、-1.4489近似相等可以約去,進一步降低控制模型階數,桁桿系統本體動力學模型為:
其開環根軌跡如圖6所示,設計內環阻尼比為0.875,其內環阻尼器反饋系數為:
外環通過比例控制提高收斂速度,為了保證系統最終的跟蹤精度,降低穩態誤差,引入積分環節,提高系統型別。基于以上分析,外環通過PI控制實現,外環控制律為:
桁桿系統外環開環根軌跡如圖7所示,開環根軌跡上平面呈V形,這表明隨著比例控制反饋系數的變化,在相當一部分范圍內(),根軌跡不會穿越虛軸,系統都是穩定的。設計外環阻尼比為0.8,反饋系數為:
開環系統伯德圖見圖8,系統相位裕量47.2°,幅值裕量16.6dB,控制系統具有良好的穩定性。閉環系統伯德圖見圖9,系統帶寬頻率3.56rad/s,兼顧系統相應速度和抗高頻干擾的要求;舵機帶寬頻率為15rad/s,為系統帶寬的4.2倍,舵機滿足使用要求。
2.4 仿真驗證
將原機高度保持、速度保持控制器應用于模型(2),仿真結果見組圖10,仿真結果表明控制器應用于原機及加裝硬式桁桿系統后的飛機,其實例仿真曲線幾乎完全一致,速度、高度能夠很快平穩地跟隨到期望目標,這表明針對2.3節的問題1,通過縱向模態的特征根比對反映桁桿系統對原機飛控系統的影響程度的方法是可行的,當飛機運動模態特征根接近時,飛機加裝硬式桁桿系統不影響原機飛控系統正常使用。
桁桿系統保持平衡狀態,給定5°階躍增量,其仿真曲線如圖11所示,5s后桁桿偏角跟隨到期望數值并保持穩定,超調較小,控制效果很好,應用到飛機-桁桿耦合模型,時歷曲線基本一致,說明本文降階處理方法合理可行。
在桁桿偏角調整過程中,其小翼偏度如圖12所示,為保證桁桿偏角增加10°,最終小翼偏度變化了0.5°,整個調節過程小翼偏度變化最大量約1.5°,過程變化平緩,舵機滿足使用要求。
3? 結語
本文通過對運輸機外伸硬式桁桿系統風洞試驗與力學分析,建立桁桿系統動力學方程,并進行降階處理,在此基礎上開展控制律設計并進行仿真,結果表明:
(1)通過飛機運動模態特征根量化桁桿對原機飛控系統的影響,加裝外伸硬式桁桿系統不影響原機飛控系統的正常使用;
(2)采用飛機短周期模態與桁桿運動模態相結合的降階模型具有非常高的精度,滿足桁桿系統控制律設計需求;
(3)桁桿系統采用內環阻尼器增穩控制結合外環PI控制進行桁桿系統姿態控制的設計方法可行。
通過本文研究,可為運輸機外伸桁桿系統控制律設計提供重要的理論參考。
參考文獻
[1] 陸宇平,楊朝星,劉洋洋. 空中加油系統的建模與控制系統綜述[J].航空學報,2014.,35(9):2375-2389.
[2] 蔣軍昌,高亞奎,陳明.空中加油伸縮管裝置控制系統研究[J].飛行力學,2008,26(2):87-90.
[3] 陳麗煞,賈秋玲,張賢雷.基于特征結構配置的硬式空中加油管解耦設計[J].計算機仿真,2010,27(11):28-31.
[4] Jeremy J.Smith, Donald L.Kunz. Simulation of the dynamically coupled KC-135 tanker and refueling boom[J].AIAA paper,2007.2007-6711.
[5] 姚建勛,袁冬莉,鮑泳林.基于Fluent的硬式空中加油桿氣動特性計算[J].科學技術與工程,2012,19(12):4713-04.
[6] 何潔,許一鳴.硬式空中加油系統對接機構設計及其動力學特征[J].機械設計與研究,2019(4):209-212.
