
自動駕駛汽車感知系統概述
2019-04-27 08:29:50謝卉瑜杜志彬孫亞軒
時代汽車 2019年18期
謝卉瑜 杜志彬 孫亞軒
摘要:自動駕駛汽車可以提供更高的安全性、生產率和交通效率,將在未來城市交通系統中擔任重要角色。得益于可用算力的增長和感知系統技術成本的降低,自動駕駛領域的研究在近幾年內急速推進。本文介紹了自動駕駛汽車感知系統的主要架構,剖析了其面臨的挑戰,并預測了未來的發展方向。
關鍵詞:自動駕駛;感知系統;傳感器;定位系統
1 引言
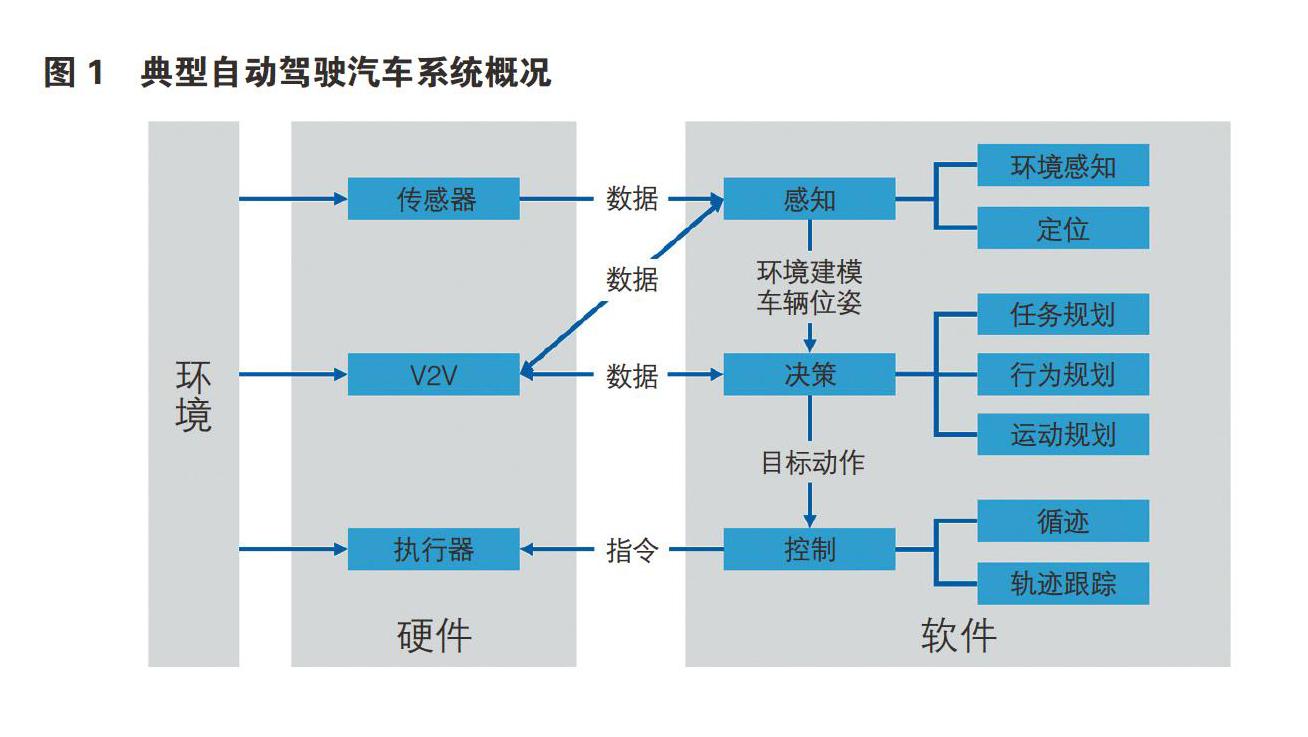
自動駕駛汽車(Autonomous Vehicle)技術逐步以開展車輛高級輔助駕駛系統(ADAS)研發和商用的形式在我們的社會中脫穎而出。這些技術旨在減少事故發生的頻率和嚴重程度,減少尾氣排放以及更有效地利用基礎資源。自動駕駛的關鍵技術主要為感知( Perception)、決策(Planrning)和控制( Control)三個方面,這些技術與車輛及環境的交互如圖1所示。自動駕駛汽車可以利用傳感器感測其環境,收集周圍環境的信息,包括道路信息、行人信息和交通指示牌信息等,并與決策系統和控制系統進行交互,同時利用道路網絡、道路規則、汽車動力學等先驗信息進行決策和控制車輛[1]。
2 感知系統概況
感知系統以多種傳感器捕獲的數據以及高清地圖的信息作為輸入,經過一系列的計算和處理,來預估車輛的狀態和實現對車輛周圍環境的精確感知,可以為下游決策系統模塊提供豐富的信息。
2.1 感知傳感器分類
自動駕駛汽車需要持續觀察周圍的環境,精確計算在各種范圍內的位置。為了能達到這種目的,需要在汽車周圍和內部安裝不同類型的傳感器。和輪式機器人所需要的傳感器相似,自動駕駛汽車所配備的傳感器可分為三大類:環境感知傳感器(Surroundingsensing),定位傳感器(Localization),自感應傳感器(Self-sensing)。
環境感知傳感器利用外部感應傳感器(exteroceptive sensors)感知交通標示、道路狀態、天氣狀況、駕駛員狀態、包括其他車輛在內的障礙物狀態(位置、速度、加速度等)以及他們未來的狀態。環境感知傳感器決定了智能汽車與外界環境交互的能力,是自動駕駛汽車的硬件架構基礎[2]。環境感知傳感器分為自主式和協同式兩大類。自主式傳感器通常是以電磁波的形式發射能量并測量返回時間以確定距離等參數,現有的自主式環境感知傳感器有超聲波雷達、毫米波雷達和激光雷達等。而接受來自車聯網或者車路協同網絡輸出感知消息的則屬于協同式環境感應[3],例如基于光和紅外的相機。
定位是一臺自動駕駛車輛的基礎功能,需要告訴車輛相對于全球和本地的精確位置。目前廣泛使用的定位方法是利用GPS等外部感應傳感器,精度可以從幾十米到幾毫米不等,具體取決于信號強度和所用設備的質量,精度越高,價格也就相對越昂貴。在市區等復雜路況場景下,所需的定位精度不超過10cm,如果定位誤差過大,那么自動駕駛汽車在城市道路行駛時會由于位置信息不準發生剮蹭等車輛安全問題,重則引發交通事故。為了獲得高精度結果,通常使用定位傳感器組合,例如GPSs、IMUs、里程表和相機(通過基元和構建好的地圖進行點云匹配,即SLAM)。來自多個不同傳感器的數據融合可以最大限度地減少單一傳感器的缺陷,從而提升整個定位系統的可靠性和魯棒性。
自感應傳感器使用本體感應傳感器(Proprioceptive Sensor)來測量車輛當前的狀態,包括速度、加速度、角速度和轉向角。本體感應信息通常使用預先安裝的測量單元來確定,例如里程表、慣性測量單、陀螺儀和來自控制器局域網(CAN)總線的信息[4]。
2.2感知傳感器融合
感知融合或數據融合旨在改進來自傳感器的兩個或多個數據源的測量結果,發揮各個分立傳感器的優勢,提供冗余、完備、準確、時效的環境目標信息,從而提高系統決策的正確性和安全性。例如,激光雷達可以對周圍物體進行建模從而形成高清的3D圖像,且不會被環境中的信號源干擾,但是只能收集少量的物體外觀形狀信息;相反,相機可以提供豐富的物體外觀數據以及更多的細節,但是容易受到環境中的光照影響。激光雷達和相機都是光學類的傳感器,可以實現在傳感器內部的數據融合,并降低后續模塊的計算處理過程。為了能充分發揮兩者的作用并消除傳感器信息之間的亢余從而獲得更加精確的信息,激光雷達和相機之間的傳感器融合是必要的。
傳感器融合對于硬件和軟件都有一定要求,硬件方面需要配備多種不同的傳感器;軟件方面需要有足夠優化的算法,數據處理的速度要足夠快且容錯率高,才能保證最終決策的準確度和速度。自動駕駛中傳感器融合通常使用的融合算法有貝葉斯理論、卡爾曼濾波和DS證據理論法等。
3 感知系統面臨的挑戰
3.1在極端天氣(雨、雪和大霧)條件下的感知
目前自動駕駛系統在一些特殊或者極端惡劣的天氣狀況下,處理是非常困難的。即使是人類駕駛員,這種情況也十分棘手。在下雪的條件下,無論是基于視覺的感知系統還是基于Lidar的感知系統都存在識別感知的困難,相機會因為有雪的附著不能正確識別道路標記,從而無法正確導航道路;雪的密度也會影響激光雷達光束的反射效果,干擾自動駕駛車輛對周圍環境的正確判斷。福特的自動駕駛汽車則通過同時裝備激光雷達和精確的三維地圖來應對雨雪天氣。兩種技術的結合使用可以識別檢測到雨雪是否是障礙物:當激光光束穿過雨滴或者雪花時,激光雷達可能會將之識別成道路障礙物,通過持續跟蹤探測這些障礙物,因為激光光束不可能在同一位置上探測到同一滴雨或一片雪花兩次,運用算法,車輛就能夠將雨雪排除在道路障礙物之外。
目前在冬季環境下實現無人駕駛還有很多未知的盲區,例如應對冬季道路結冰積雪等問題,僅能通過安裝雪地胎解決。另外如果自動駕駛汽車出現輪胎打滑等危險情況該如何應對,是否應該在自動駕駛汽車上配備和乘用車相同的汽車安全技術(如ABS,ESP等),這些問題還有待解決。
3.2駕駛員對于自動駕駛系統功能的正確認知
ADAS系統會讓人類駕駛員在超出系統解決問題能力范圍的場景中依然依賴于自動化技術。在自動駕駛的中間階段(即L2和L3階段的自動駕駛系統),駕駛員可能不會完全理解該階段自動駕駛自主特征的范圍和限制,過度信任或依賴傳感器從而造成事故的發生。例如,ACC控制在一輛汽車直接跟隨另一輛時有出色的表現,但通常無法檢測到靜止的物體。而且半自動駕駛汽車的駕駛員可能會嘗試進行其他的活動,因此在要求接管汽車的控制權時會缺少所需的情景意識。在人類駕駛員重新接管汽車控制權時,他們必須立即對周圍環境進行判斷、確定車輛的位置、根據車輛所處的危險情景決定并施行安全合理的行動方案。而司機脫離駕駛狀態的時間越長,重新介入駕駛所需的時間就越長。所以駕駛員對于自動駕駛系統功能的正確認知,是保證自動駕駛系統正確運行的一大重要條件。
4 感知系統未來發展方向
自動駕駛感知系統需要進一步提高準確度和精度,改善感知系統在不利照明和極端惡劣天氣條件下的感知能力,未來自動駕駛感知傳感器會向更加靈敏的方向發展[5],增強針對復雜城市路況的處理能力來應對各種不利條件和突發狀況。通過交叉驗證障礙物的位置信息,減少感知系統傳感器數據的不確定性;增強車輛與車輛(V2V)、車輛與基礎設備(V21)之間的通信;使用新型低成本高效的傳感器,進一步加強傳感器融合算法的開發;通過多傳感器融合來減少各個分立傳感器缺點的影響,并通過使用傳感器的互補性和亢余度來發揮每個傳感器的優勢,以提高自動駕駛感知系統的準確性、可靠性和確定性。
5 結語
隨著技術的進步,自動駕駛汽車飛速發展,已經成為汽車行業的發展趨勢。本文介紹了感知系統傳感器的分類、面臨的挑戰和未來的發展方向。現階段自動駕駛汽車還面臨著硬件和軟件雙方面的挑戰,還需要從業者不斷地完善自動駕駛技術體系和相關法律法規體系。目前,雖然一些L2甚至L3級別的自動駕駛車輛已經實現了商業化落地,但在距離實現完全自動駕駛,我們還有很長的路要走。
參考文獻:
[1]王金強,黃航,郅朋,申澤邦,周慶國.自動駕駛發展與關鍵技術綜述[J]電子技術應用,2019,45( 06):28-36
[2]陳思宇基于多傳感器智能汽車環境感知系統研究[D]南昌航空大學,2017.
[3]梁敏健智能車行車環境視覺感知關鍵技術研究[D]長安大學,2017
[4]Uessica Van Brummelen, Marie O' Brien,Dominique Gruyer, Homayoun NajjaranAutonomous vehicle perception: Thetechnology of today and tomorrow[J].Transportation Research Part C, 2018. 89
[5]蔣婷.無人駕駛傳感器系統的發展現狀及未來展望[J].中國設備工程,2018( 21):180-181.
