基于BP神經(jīng)網(wǎng)絡(luò)永磁同步電機矢量復(fù)合控制
2019-06-19 02:33:41李海俠林繼燦唐海洋
現(xiàn)代電子技術(shù) 2019年11期
關(guān)鍵詞:永磁同步電機
李海俠 林繼燦 唐海洋


摘 ?要: 為減小永磁電機PI控制器的速度超調(diào),解決常規(guī)IP控制跟蹤響應(yīng)慢的特點,提出一種基于BP神經(jīng)網(wǎng)絡(luò)的矢量控制和PI?IP復(fù)合控制器的優(yōu)化策略。綜合BP神經(jīng)網(wǎng)絡(luò)、雙閉環(huán)矢量控制以及PI?IP復(fù)合控制器的優(yōu)點,在傳統(tǒng)雙閉環(huán)矢量控制中,對速度環(huán)引入新型的PI?IP控制器,同時結(jié)合BP神經(jīng)網(wǎng)絡(luò)的控制策略,完成BP神經(jīng)網(wǎng)絡(luò)矢量PI?IP控制器對永磁電機的速度控制,免去復(fù)雜的參數(shù)調(diào)整過程,同時提高永磁電機的工作性能。仿真結(jié)果表明,與常規(guī)控制方法相比,所提方法能有效減小速度超調(diào),抑制擾動,BP神經(jīng)網(wǎng)絡(luò)優(yōu)化后的PI?IP控制器具有更強的控制精準性和抗負載轉(zhuǎn)矩擾動能力。
關(guān)鍵詞: 永磁同步電機; 雙閉環(huán); PI?IP控制; BP神經(jīng)網(wǎng)絡(luò); 矢量復(fù)合控制; 仿真研究
中圖分類號: TN876?34; TM351 ? ? ? ? ? ? ? ? ? ?文獻標識碼: A ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2019)11?0104?04
Abstract: In order to reduce the speed overshoot of the permanent magnet motor PI controller, and improve the tracking response of conventional IP control, an optimization scheme of vector control based on BP neural network and PI?IP composite controller is proposed, in which the advantages of BP neural network, double closed?loop vector control and PI?IP composite controller are synthesized. In the traditional double closed?loop vector control, a new PI?IP controller is introduced into the speed loop, and combined with the control strategy of BP neural network to complete the speed control of the permanent magnet motor by means of BP neural network vector PI?IP controller, so as to avoid the complex process for parameter adjustment, and improve the working performance of permanent magnet motor. The simulation results show that, in combination with conventional control methods, the proposed method can effectively reduce the speed overshoot and suppress the disturbance, and the PI?IP controller optimized by BP neural network has higher control precision and stronger resistance ability to load torque disturbance.
Keywords: permanent magnet synchronous motor; double closed?loop; PI?IP control; BP neural network; vector compound control; simulation research
0 ?引 ?言
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)具有多變量、強耦合和非線性等特性[1]。因其工作效率高、調(diào)速范圍寬、電流轉(zhuǎn)矩比高等優(yōu)勢,在各個領(lǐng)域得到推廣應(yīng)用。
在PMSM的矢量控制策略中,需要整定的參數(shù)受逆變器驅(qū)動電壓、電機電流等影響,控制器含有積分項,在給定輸入的速度階躍突變時,容易發(fā)生積分飽和而導(dǎo)致控制系統(tǒng)產(chǎn)生超調(diào),增加系統(tǒng)步入穩(wěn)定的時間。傳統(tǒng)的IP控制器存在整定速度較慢以及跟蹤響應(yīng)能力不足等問題[2]。文獻[3]提出一種將評價函數(shù)IITAE和坐標輪換法結(jié)合的算法來整定PI控制參數(shù),但沒有標準的規(guī)則來整定參數(shù)且優(yōu)化時間過長。文獻[4]提出一種基于RBF的PI?IP的復(fù)合控制器,在RBF神經(jīng)網(wǎng)絡(luò)中隱藏基函數(shù)的中心,映射于輸入樣本中,難以反映出系統(tǒng)真正的輸入輸出關(guān)系。
本文提出基于BP神經(jīng)網(wǎng)絡(luò)的永磁電機矢量PI?IP復(fù)合控制策略。在空間矢量控制中,單一的PI控制器難以滿足工程需求,對速度轉(zhuǎn)矩精度要求較高的工作環(huán)境,將PI和IP控制器復(fù)合使用,形成PI?IP控制器,綜合兩者的優(yōu)點,同時將具有非線性映射能力以及容錯能力強的BP神經(jīng)網(wǎng)絡(luò)引入到矢量PI?IP控制中,自調(diào)整系統(tǒng)參數(shù),實現(xiàn)矢量控制系統(tǒng)上速度環(huán)的復(fù)合控制,提高控制精度,進而優(yōu)化整定后的矢量控制系統(tǒng)。最后基于Simulink仿真平臺驗證方法的可行性。
1 ?永磁同步電機的數(shù)學模型
為簡化分析,建立表貼式永磁同步電機數(shù)學模型,電機狀態(tài)方程如下:
2 ?矢量控制
矢量控制又名磁場定向控制, 其控制策略是仿造直流電機的控制思路,使用正交變化(功率和磁動固定),通過Clark和Park變化,進行坐標相對變化。勵磁電流分量[iM]和轉(zhuǎn)矩電流分量[iT]參數(shù)的輸出調(diào)節(jié)直接作用于磁通和轉(zhuǎn)矩[6],最后通過解耦簡化控制過程,完成矢量控制。
磁場定向控制系統(tǒng)對轉(zhuǎn)矩的控制用等式(3)實現(xiàn),工作原理如圖1所示。
圖1 ?矢量控制原理圖
由圖1可知, [iM],[iT]兩個旋轉(zhuǎn)坐標直流分量由三相電流通過Clark和Park變化得到,作為電流環(huán)的負反饋。[iTref]通過PI調(diào)節(jié)器整合作用于轉(zhuǎn)矩控制。[iTref]和[iMref]與電流反饋量[iM],[iT]的偏差,調(diào)整輸出電壓[UMref]和[UTref]兩個量作為[M],[T]旋轉(zhuǎn)坐標系下的分量。利用Park逆變換,獲得分量[Usαref]和[Usβref],為靜止坐標系[α]和[β]的矢量。確定分量扇區(qū)數(shù)后, SVPWM控制策略產(chǎn)生的PWM信號用來調(diào)節(jié)逆變器 [7?8]。
3 ?BP神經(jīng)網(wǎng)絡(luò)的矢量PI?IP控制
3.1 ?BP神經(jīng)網(wǎng)絡(luò)
BP神經(jīng)網(wǎng)絡(luò)是一種多層前饋網(wǎng)絡(luò),利用誤差逆?zhèn)鞑ニ惴ā>W(wǎng)絡(luò)的權(quán)值和閾值通過反向傳播進行梯度下降法迭代更新,逆向?qū)W習算法包含信息的正向傳播和反饋回來的誤差,最終通過減小誤差平方和進行結(jié)果輸出[1]。
3.2 ?BP神經(jīng)網(wǎng)絡(luò)的速度PI?IP控制器
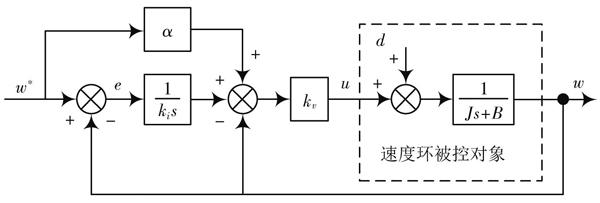
在矢量控制中,速度環(huán)通常采用PI控制,但PI控制存在抗干擾能力差,系統(tǒng)容易超調(diào)等劣勢。通過PI控制研發(fā)拓展而出的IP控制器擁有抗干擾能力強、穩(wěn)定性好的優(yōu)點,缺點是響應(yīng)慢。為了更好地發(fā)揮兩種控制的優(yōu)勢,本文基于永磁電機矢量控制,對速度環(huán)控制引入PI?IP復(fù)合控制,并在控制器上增加前饋因子。矢量速度PI?IP復(fù)合控制的結(jié)構(gòu)參考文獻[4]的原理框圖,如圖2所示。其中,[α]為前饋因子,變化范圍為0~1,當作為PI控制器時,[α]=1;當作為IP控制器時,[α]=0。
圖2 ?PI?IP復(fù)合控制
建立永磁同步電機模型,根據(jù)輸入量和性能指標不停更新[kv],[kvi]和[kvα]的參數(shù)值。原理圖如圖3所示,計算過程中調(diào)整學習速率[η]可減少不精確影響。
圖3 ?BP神經(jīng)網(wǎng)絡(luò)PI?IP復(fù)合控制
4 ?仿真分析
為了驗證本文提出的BP神經(jīng)網(wǎng)絡(luò)的矢量速度PI?IP復(fù)合控制方法的可行性,在Simulink上進行仿真測試,仿真圖如圖4~圖6所示,電機仿真參數(shù)如表1所示。
BP神經(jīng)網(wǎng)絡(luò)中,隱層神經(jīng)元個數(shù)為7,參數(shù)初始選取[kv=10],[kvi=0.025],[kvα=0.18],采樣周期取0.001 s,控制器參數(shù)的學習速率[η=0.7],慣性系數(shù)[β=0.02]。20 N?m負載在0.25 s時加入。
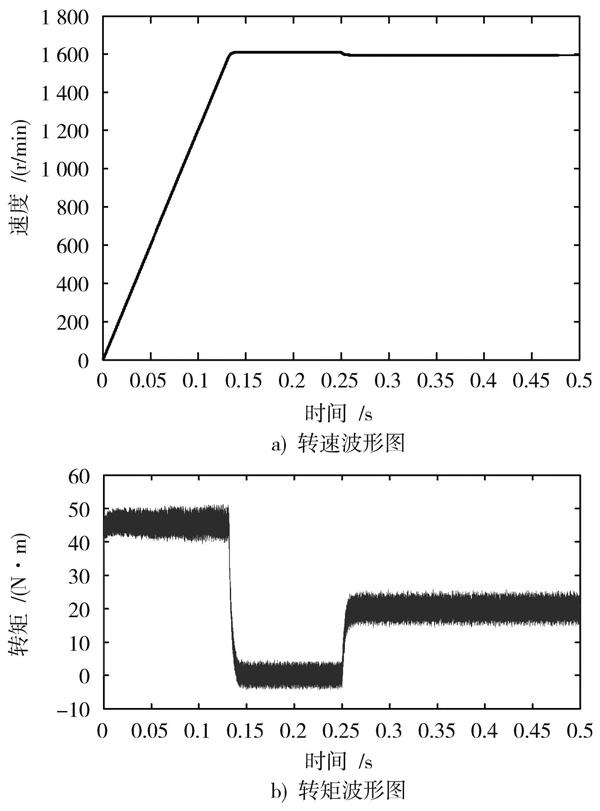
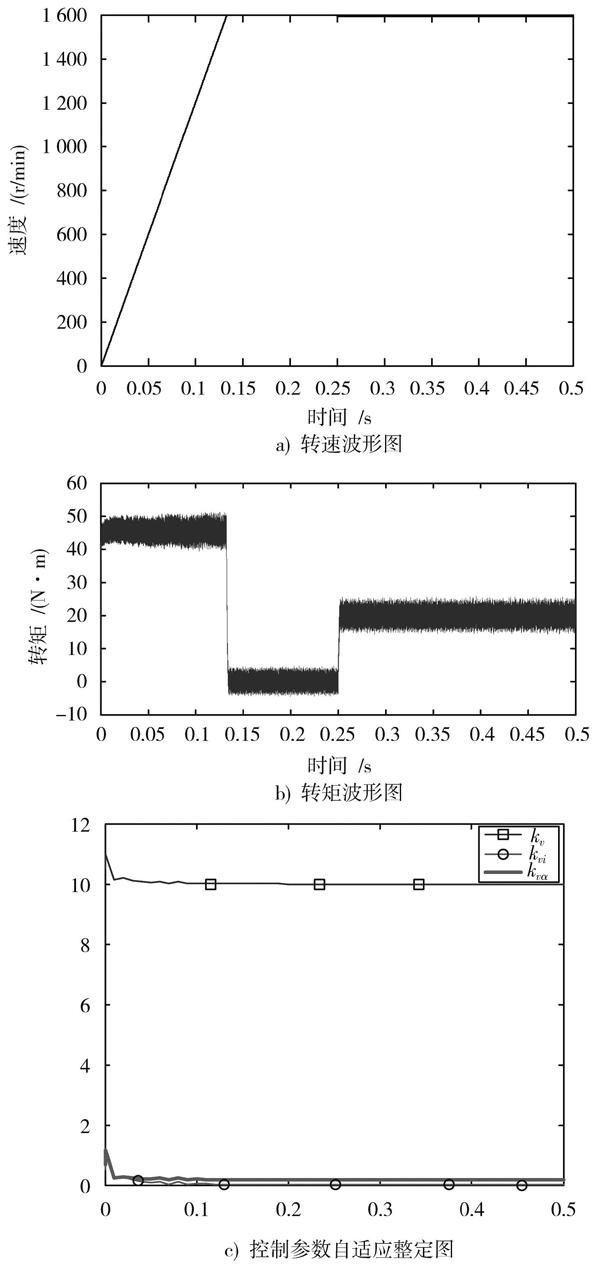
分析圖4~圖6,常規(guī)PI控制策略中轉(zhuǎn)速存在超調(diào),輸出波形毛刺較多,轉(zhuǎn)矩的變化波動較大;常規(guī)的IP控制方法的轉(zhuǎn)速不能很好地達到額定轉(zhuǎn)速,穩(wěn)定時間比較長;而基于BP神經(jīng)網(wǎng)絡(luò)的矢量PI?IP控制策略轉(zhuǎn)速響應(yīng)優(yōu)于傳統(tǒng)控制策略,同時轉(zhuǎn)矩輸出波形以及穩(wěn)定性也更優(yōu)。系統(tǒng)穩(wěn)定后加入負載,通過輸出曲線可知,與常規(guī)速度PI和IP控制方法相比,基于BP神經(jīng)網(wǎng)絡(luò)的矢量PI?IP控制策略輸出曲線更加光滑,穩(wěn)定時間更短,轉(zhuǎn)矩的穩(wěn)定時間也更優(yōu)。綜上可知,采用基于BP神經(jīng)網(wǎng)絡(luò)的矢量PI?IP控制方法較常規(guī)矢量PI和IP兩種控制方法而言,有更好的魯棒性以及穩(wěn)定性。
圖4 ?常規(guī)速度PI控制([α]=1)

圖5 ?常規(guī)速度IP控制([kvα]=0)
5 ?結(jié) ?語
本文將神經(jīng)網(wǎng)絡(luò)矢量控制理論與PI?IP電機控制理論相結(jié)合,給出一種基于建模調(diào)優(yōu)的矢量PI?IP控制器,并在永磁同步電機的調(diào)速系統(tǒng)中驗證方法的有效性。同時,隨著實時系統(tǒng)的變化,能夠有效提高電機的工作性能,例如在加入負載的情況下,電機能快速恢復(fù)穩(wěn)定并正常運行,以及算法實現(xiàn)過程的優(yōu)化,能夠降低系統(tǒng)的調(diào)節(jié)時間及減小系統(tǒng)超調(diào),使系統(tǒng)工作過程更加平滑。這也說明BP神經(jīng)網(wǎng)絡(luò)矢量PI?IP控制使永磁同步電機的調(diào)速控制系統(tǒng)具有更優(yōu)的動、靜態(tài)工作性能,可以改善常規(guī)PI和IP兩種控制效果。
表1 ?電機參數(shù)
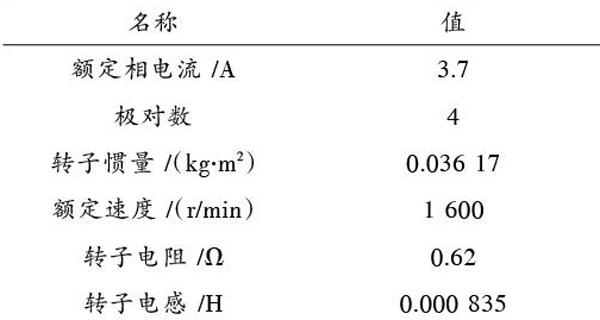
圖6 ?BP神經(jīng)網(wǎng)絡(luò)的矢量速度PI?IP控制
參考文獻
[1] 葉德住.基于BP神經(jīng)網(wǎng)絡(luò)的永磁同步電機控制[J].微電機,2016,49(11):57?61.
YE Dezhu. Permanent magnet synchronous motor control based on BP neural network [J]. Micromotors, 2016, 49(11): 57?61.
[2] 郭新華,溫旭輝,趙峰,等.基于電磁轉(zhuǎn)矩反饋補償?shù)挠来磐诫姍C新型IP速度控制器[J].中國電機工程學報,2010,30(27):7?13.
GUO Xinhua, WEN Xuhui, ZHAO Feng, et al. Novel IP speed controller of permanent magnet synchronous motor based on electromagnetic torque feedback compensation [J]. Procee?dings of the CSEE, 2010, 30(27): 7?13.
[3] 陳鵬展,唐小琦,任清榮.基于IITAE評價指標的交流伺服系統(tǒng)參數(shù)自動整定研究[J].微電機,2010,43(2):70?73.
CHEN Pengzhan, TANG Xiaoqi, REN Qingrong. Evaluation index based on IITAE research on automatic tuning of AC servo system parameters [J]. Micromotors, 2010, 43(2): 70?73.
[4] 周佳,盧少武,周鳳星.基于RBF神經(jīng)網(wǎng)絡(luò)的永磁同步電機速度PI?IP控制[J].組合機床與自動化加工技術(shù),2017(1):116?118.
ZHOU Jia, LU Shaowu, ZHOU Fengxing. Speed?PI?IP control of permanent magnet synchronous motor based on RBF neural network [J]. Modular machine tool & automatic manufacturing technique, 2017(1): 116?118.
[5] 丁博,周淵深,薛碩,等.基于電流解耦的永磁同步電機MATLAB仿真研究[J].淮海工學院學報(自然科學版),2015,24(3):33?36.
DING Bo, ZHOU Yuanshen, XUE Shuo, et al. Simulation of permanent magnet synchronous motor based on current decoupling [J]. Journal of Huaihai Institute of Technology (Natural Science Edition), 2015, 24(3): 33?36.
[6] 邱忠才,肖建,郭冀嶺,等.永磁同步電機速度預(yù)測電流解耦控制[J].電子測量與儀器學報,2015(5):648?654.
QIU Zhongcai, XIAO Jian, GUO Jiling, et al. Decoupled control of current estimation for permanent magnet synchronous motor [J]. Journal of electronic measurement and instrument, 2015(5): 648?654.
[7] 肖啟明,楊明,劉可述,等.PMSM伺服系統(tǒng)速度環(huán)PI控制器參數(shù)自整定及優(yōu)化[J].電機與控制學報,2014(2):102?107.
XIAO Qiming, YANG Ming, LIU Keshu, et al. Parameters self?tuning and optimization of speed PI controller for PMSM servo system [J]. Electrical machines and control, 2014(2): 102?107.
[8] 趙輝,魯超,馮金釗.基于SVPWM的永磁同步電機控制策略研究[J].電測與儀表,2009,46(7):13?16.
ZHAO Hui, LU Chao, FENG Jinzhao. The research of control strategy for PMSM based on SVPWM [J]. Electrical measurement & instrumentation, 2009, 46(7): 13?16.
[9] 王敏.神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制器的暖通控制系統(tǒng)[J].現(xiàn)代電子技術(shù),2017,40(23):137?139.
WANG Min. HVAC control system based on neural network optimizing PID controller [J]. Modern electronics technique, 2017, 40(23): 137?139.
[10] 邵珠榮,王寧.基于IP控制和擴展卡爾曼濾波的PMSM轉(zhuǎn)速控制[J].大連海事大學學報,2016,42(1):90?95.
SHAO Zhurong, WANG Ning. Speed control of permanent magnet synchronous motors based on integral proportion control and extended Kalman filter [J]. Journal of Dalian Maritime University, 2016, 42(1): 90?95.
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術(shù)與自動化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
