基于WiFi 和藍牙融合的誤差區域加權算法研究
2019-06-28 06:27:14王冠凌代廣珍周先存
四川輕化工大學學報(自然科學版) 2019年3期
武 濤,王冠凌,代廣珍,周先存
(1.安徽工程大學安徽省電氣傳動與控制重點實驗室,安徽 蕪湖 241000;2.皖西學院網絡中心,安徽 六安 237012)
引 言
人們80%以上的時間都是待在室內,如購物、地鐵站、大型機場、大型廠房里的保安巡視等都是在室內的[1],導致位置服務需求的日益增長,而全球定位系統(Global Position System,GPS) 在室內環境中信號微弱,無法滿足室內定位需求。近年來隨著位置信息服務越來越受到重視,利用室內原有的WiFi 接入點,基于接收信號強度(Received Signal Strength Indicator,RSSI) 的WiFi 室內定位技術因具有成本低、精度較高等特點,深受歡迎[2-3]。另外,藍牙技術發展也十分迅速,理想環境下iBeacon 技術可以達到1 m 以內的定位精度,并且藍牙信號節點價格低廉、易于部署,可以很好地彌補室內WiFi 信號盲點。結合這兩種定位方法,利用多傳感器的融合,從而可以獲得更高的定位精度[4-5]。
基于WiFi 信號指紋方法的RADAR 系統[6-7]利用k近鄰算法進行位置估算,但其受到多徑和環境的影響較大,會出現較大的估算誤差。Horus 系統[8]采用數學概率統計方法,在無線信號空間引入概率模型,利用最大似然數進行位置估算,在多徑影響較小的地方,定位精度表現得較好,而在環境復雜的地方,精度明顯下降,且穩定性差。文獻[9]提出了低功耗藍牙手機終端室內定位方法,在離線階段設置室內位置坐標并獲取藍牙錨點的信號強度,建立藍牙信號指紋庫,通過在線階段獲取附近的實時藍牙信號強度,并與指紋庫進行匹配獲得最終的位置信息,定位精度高,但是需要定期的人工維護,即對指紋數據庫進行更新,人工成本較高。文獻[10]進一步優化了藍牙定位,提出了一種藍牙RSSI 的貝葉斯區域判別定位算法,構建了不同區域RSSI 值向量組,通過貝葉斯估計判別接受信號強度的精確區域,并對此區域的RSSI 向量組進行多點質心定位。相較于文獻[9],文獻[10]提出的優化算法提高了定位精度、降低了定位誤差,但是忽略了指紋變量對定位結果的影響,也忽略了定位點接受信號的多徑效應。文獻[11]基于藍牙RSSI 提出了一種高效節能的室內定位算法,利用用戶動作迭代縮小搜索空間以定位目標設備,并在幾個實際場景中進行了評估,在定位精度、搜索時間和能量消耗等方面都取得了良好的效果。但是過分依賴于室內環境和用戶動作,定位穩定性欠佳。文獻[12]提出了優化貝葉斯的室內WiFi 與藍牙融合定位算法,并引入競擇假設建立了融合定位誤差模型,通過獲取全局定位誤差的無偏估計,得到最終的位置信息,但是忽視了室內多徑效應產生的誤差區域化。
由于信號在傳播過程中受環境影響而造成的多徑、衰減等干擾使得RSS 信號具有時變性,基于RSSI 的室內定位算法隨定位時間的延長精度越來越低[13-14]。這將需要定期維護數據指紋庫,從而提高了人工成本,給工作人員帶來了極大的不便。本文提出了一種基于WiFi 和藍牙融合的誤差區域加權定位算法(ERWLA) :(1) 離線階段,利用WiFi 和藍牙的信號強度,采用多邊定位得到各模型的定位區域,再利用區域面積的自適應加權算法得到WiFi 和藍牙融合的位置信息,以降低定位誤差,并建立融合誤差模型,進行誤差分析。利用移動最小二乘插值法(MLSI) 對誤差進行曲面擬合,以獲得誤差回歸函數[15-18]。(2) 在線階段,算法獲取輸入融合位置信息,輸出加權擬合誤差,獲得最終的位置估計。本文算法考慮到室內的誤差區域化,通過運用權函數對局部誤差加權,以達到最優的位置估算,實現高精度的定位服務。實驗結果表明基于WiFi 和藍牙融合的誤差區域加權定位算法具有良好的定位性能,且相較與對比算法,在相同的環境下具有更好的定位精度和穩定性。因此,在復雜的室內環境中也能達到很好的定位效果。
1 基于定位區域加權融合算法
1.1 基于信號強度的測距模型
基于信號強度的測距模型[5,12],其核心思想在于:信號在傳播過程中,接受的信號強度會隨距離的增加而衰減。因此,信號在傳播過程中的衰減特性暗含著距離信息。
在真實環境中,信號的反射、散射或者遮蔽的現象對信號的采集產生很大的干擾。這些影響通常與環境相關,且難以用精確的數學模型來刻畫。由于信號傳播的不確定性,研究者通常假設接收信號強度滿足對數正態分布。在該假設條件下,信號強度隨距離變化的模型可以被進一步描述為對數正態陰影模型:

其中,P0(d0) 和Pr(d) 分別表示接收在距離信號源為d0和d 處的信號強度; η 表示路徑損耗參數; Xσ是服從正態分布的隨機變量,表示信號的反射現象對所接收信號造成的影響。本文在室內設置場景進行實驗時將η 值選取為2.0,對Xσ經過多次測量后修正為2.6。在路徑損耗參數已知時,接收者可以通過接收到的RSSI值來估計與AP 之間的距離。
1.2 WiFi 和藍牙的多邊測量定位融合模型
本文分別建立了WiFi 和藍牙多邊定位模型,并獲得WiFi 和藍牙當前位置接收到的信號強度(RSSI1,RSSI2,RSSI3,…,RSSIn) ,運用公式(1) 計算得到各個接入點AP 到當前位置的距離(d1,d2,d3,…,dn) ,并選取其中的4 個最短距離進行多邊測量。然后分別以這4個AP 接入點分別作為球心、相應距離d 為半徑,建立數學模型,如圖1 所示。
令上面選取的4 個WiFi 和藍牙的AP 接入點坐標分別為: (xw1,yw1,zw1) 、(xw2,yw2,zw2) 、(xw3,yw3,zw3) 、(xw4,yw4,zw4) 和(xb1,yb1,zb1) 、(xb2,yb2,zb2) 、(xb3,yb3,zb3) 、(xb4,yb4,zb4) 為了形式的簡潔,將以上坐標統一記為: (x1,y1,z1) ︿(x4,y4,z4) ,于是得到多邊測量的模型的方程組如下:

圖1 數學模型
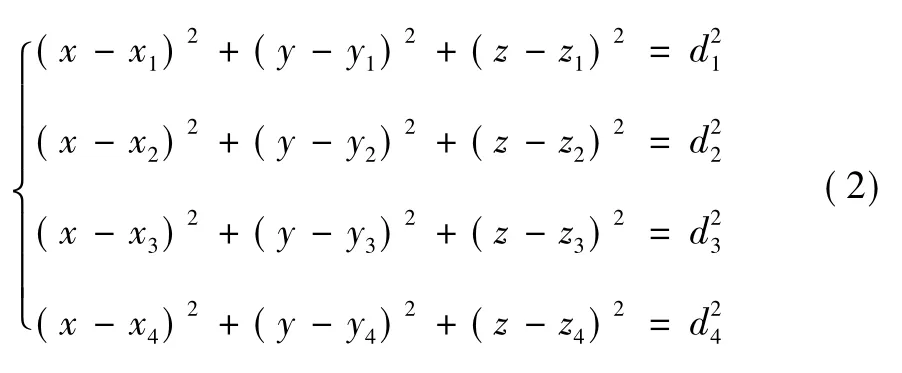
利用式(2) ,可以得到四個球體的公共體積。令定位目標的手持移動設備高度為h,并使用(0,0,h) 平面來對公共部分進行切割得到式(3) ,切割面如圖2 所示。簡化模型得到定位可取區域,如圖3 陰影部分所示。
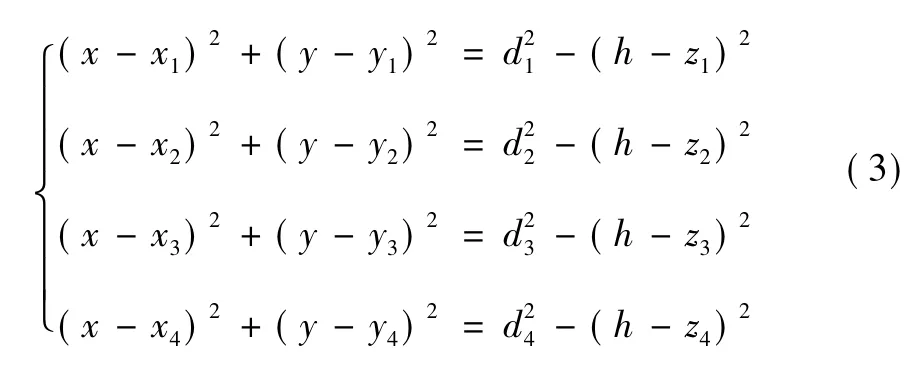
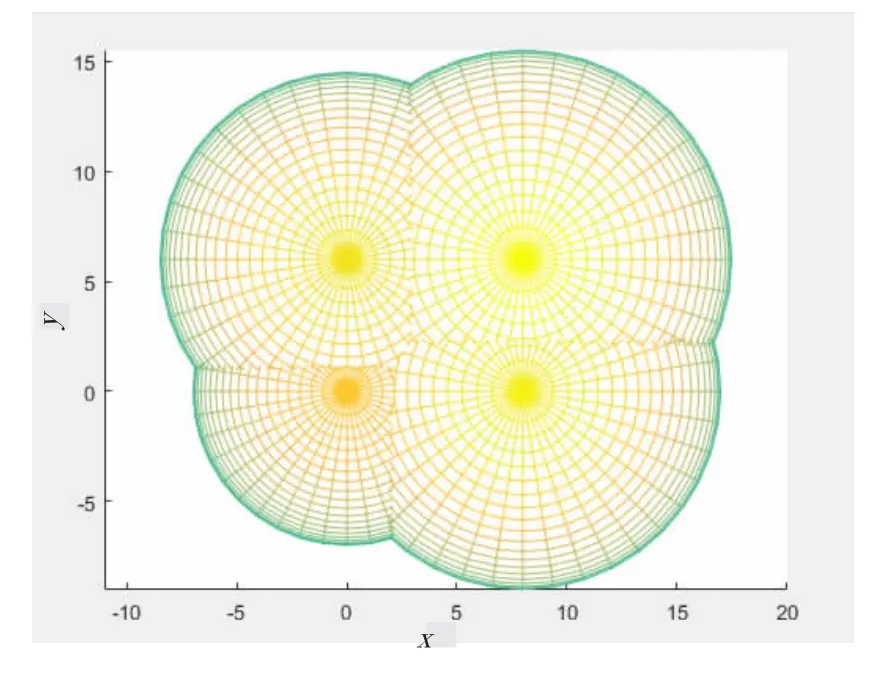
圖2 模型切割面
根據手持移動設備的高度平面截取AP 接入點為球心的三維空間模型,得到二維定位可取區域,減小了定位范圍,降低了二維空間帶來的誤差,且提高了定位精度。
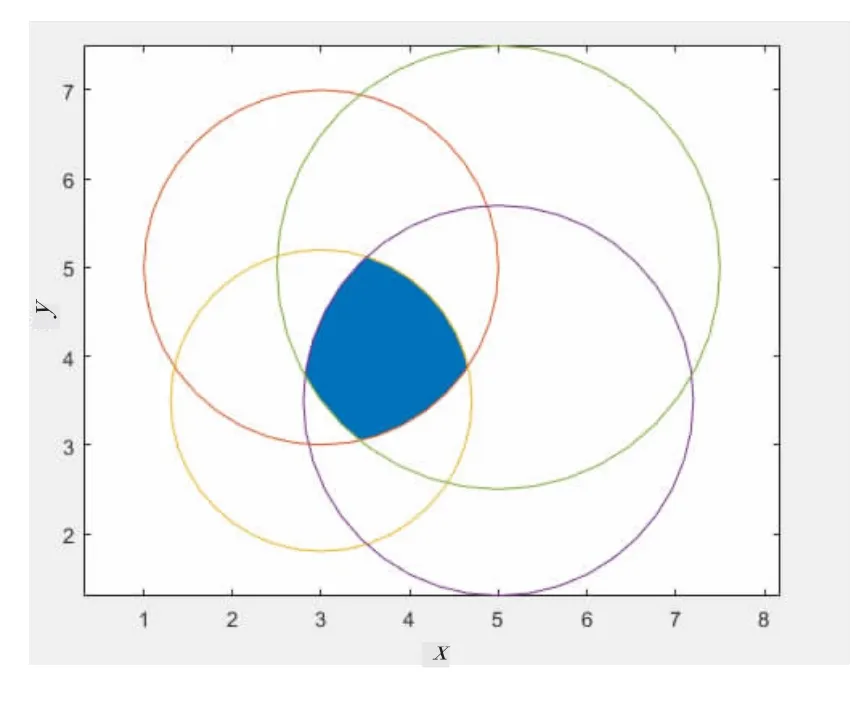
圖3 定位可取區域
圖3中陰影部分表示的是WiFi 和藍牙定位可取區域Aw和Ab,其面積記作ΔSw和ΔSb。由于定位精度和ΔS是成反比,即ΔS 越大,定位精度越低。因此,通過給定位可取區域面積ΔS 設立置信度限定可取區域,并對WiFi 和藍牙定位結果進行加權融合,可以有效提升定位精度。WiFi 和藍牙定位的置信度分別定義為:

將式(4) 中的WiFi 和藍牙定位置信度融合,并進行權值歸一化得到式(5) :

實驗場景布置過程中設定的兩個先驗信息源分別為:WiFi 定位坐標(xw1,yw1) ,(xw2,yw2) ,…,(xwi,ywi) 和藍牙定位坐標(xb1,yb1) ,(xb2,yb2) ,…,(xbi,ybi) ,分別記作(x,y)w和(x,y)b。與信息坐標對應的i 個參考點坐標為(x1,y1) ,(x2,y2) ,…,(xi,yi) 。根據公式(5) ,分別對WiFi 和藍牙位置坐標進行加權處理,得到的融合定位坐標為:
1.3 融合定位誤差分析
1.3.1 融合定位誤差
融合定位誤差定義為現場定位坐標(x,y) 與WiFi和藍牙融合定位坐標(x',y') 之差,表示為(σx,σy) ,其中:

將WiFi 和藍牙融合坐標與融合定位誤差組合,得到三維空間坐標(x',y',σx) 和(x',y',σy) ,并采用移動最小二乘插值法進行擬合。
1.3.2 移動最小二乘法
在三維區域內的一個局部子域上誤差函數表示為σ(x) ,其中x = [x,y]T。逼近擬合函數定義為:

其中,a(x) = [a1(x) ,a2(x) ,…,an(x) ]T為相應的待定系數向量,ai(x) (i = 1,2,…,m) 是關于x 點坐標的函數; p(x) = [p1(x) ,p2(x) ,…,pn(x) ]T為m 維基函數向量,pi(x) (i = 1,2,…,m) 是一個二階多項式,m是基函數向量的項數。對于三維空間,基函數向量的項數為6,p(x) 表示如下:

引入緊支集限定點(x,y) 處的誤差值σ 只受到附近子域節點的影響,其子域稱作點(x,y) 的影響區域,子域外的節點對其沒有影響,即設置定位置信度。定義逼近函數與誤差函數之差的平方加權為目標函數:
式中,w(x - xi) 是節點xi的權函數,n 為緊支區域內的節點個數,u(x) 是逼近擬合函數,而σ(xi) 是定義域上的誤差函數。為了獲得相應的系數a(x) ,將目標函數對a(x) 進行求導數,并求極值點a(x) :
其中,

把公式(12) 代入到式(8) 中,得到MLS 逼近擬合函數:


目標函數中的加權函數要求具有緊支性、非負性、連續性且具有高階導數,以保證系數的唯一性。由于高斯加權服從正態分布,對于較小的定位誤差權重較大,當定位誤差越來越大時,權重越來越小,因此能夠很好地平滑擬合曲面。定義高斯加權函數為:
算法擬合曲面步驟如下:
Step1:實現采集的參考點和眾包定位準確點的位置信息為(xi,yi,σi) ,選擇基函數p(x) 。
Step2:遍歷每個未知點,形成形狀函數。
(a) 建立加權函數w(x) ,n 個節點坐標的加權函數并形成矩陣w。
(b) 通過公式(13) 計算出A(x) 和B(x) 的值。并用SVD 方法得出A-1(x) 。
Step3:結束未知點循環。
Step4:得到逼近擬合函數u(x) 。
1.3.3 移動最小二乘插值法
移動最小二乘法擬合的誤差函數與實際誤差之間存在偏差。若要減少擬合偏差,采用插值擬合就必須使得權函數w(x - xi) 在xi點處是奇異的,但這會使系數矩陣A(x) = pTw(x) p 在x →xi時趨向于無窮大。為此,采用對基函數正交處理。將基函數p1(x) 在x 點處單位化為:
再將p2,p3,...,pm與在x 點處正交化:
其中,v(x - xi) 為權函數的歸一化,即


運用MATLAB 編程實現MLS 插值擬合法對融合定位誤差模型數據的仿真,得到如圖4 和圖5 所示的誤差擬合。
由于室內RSSI 值受多徑效應的影響,且環境隨著時間而改變。因此,采集的RSSI 值顯示為動態性。當前的參考點很少且都是靜態的,結合用戶反饋的定位效果好的眾包節點,動態更新MLSI 算法需要擬合的已知節點。輸入當前位置的融合信息(x,y) ,利用MLSI 算法的回歸函數,得到融合定位誤差σx和σy。當前位置融合定位的最終估計值為:

其中,x' 和y' 分別是當前位置融合定位的橫坐標和縱坐標,而σx和σy是通過影響區域加權回歸得到的融合定位坐標誤差。
2 實驗設計與結果分析
2.1 實驗設計
WiFi 和藍牙融合定位試驗環境為7 m×7 m 的實驗室,如圖6 所示。實驗中設置了4 個WiFi AP 信號節點,使用的是普通型號路由器TengDa-AC6,節點坐標分別為(0,0,4) 、(6.6,0,4) 、(0,6.6,4) 、(6.6,6.6,4) ,單位為m。同時設置了4 個藍牙節點和64 個均勻分布的參考節點。
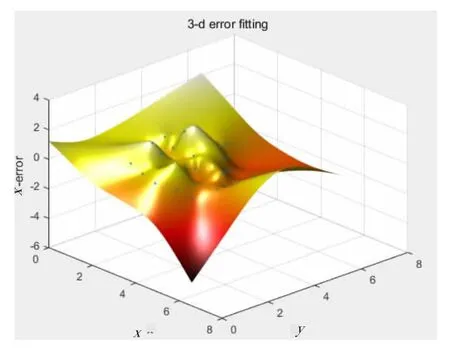
圖4 X 誤差擬合圖
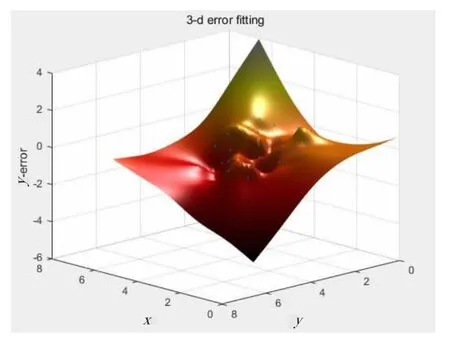
圖5 Y 誤差擬合圖
采集設備為HuaWei Mate9,利用WiFi 魔盒APP 采集WiFi 信號的RSSI 值,利用BLE Debugger 采集藍牙信標信息。
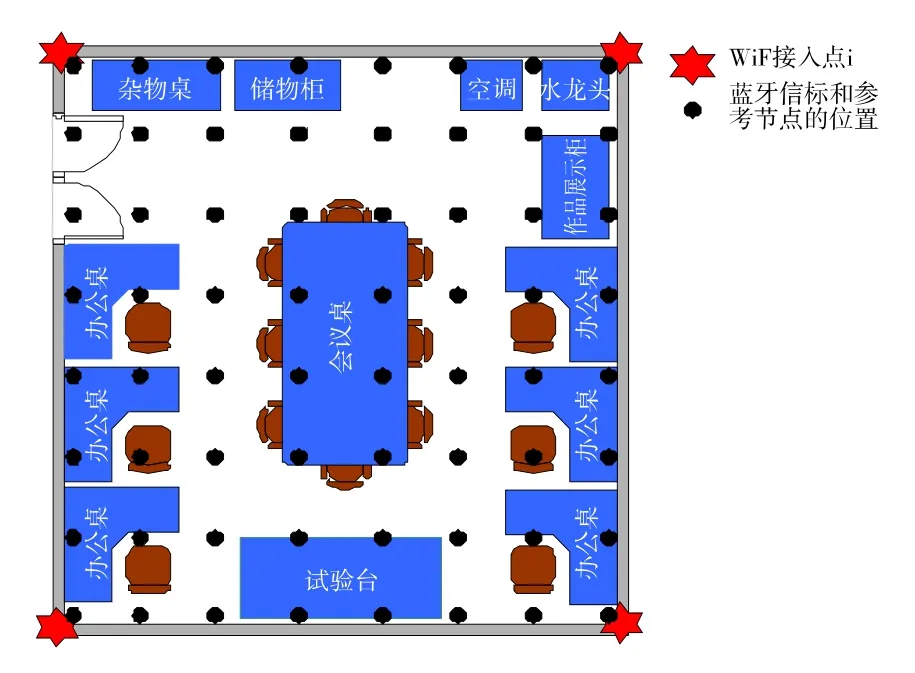
圖6 場景節點圖
2.2 實驗結果分析
運用MATLAB(2016) 軟件編程對本文提出的WiFi 與藍牙融合定位算法進行實現,并與WiFi 定位和藍牙定位進行比較。實驗結果得到的誤差累積分布如圖7所示,其中,橫坐標為誤差值,縱坐標為對應的誤差概率。
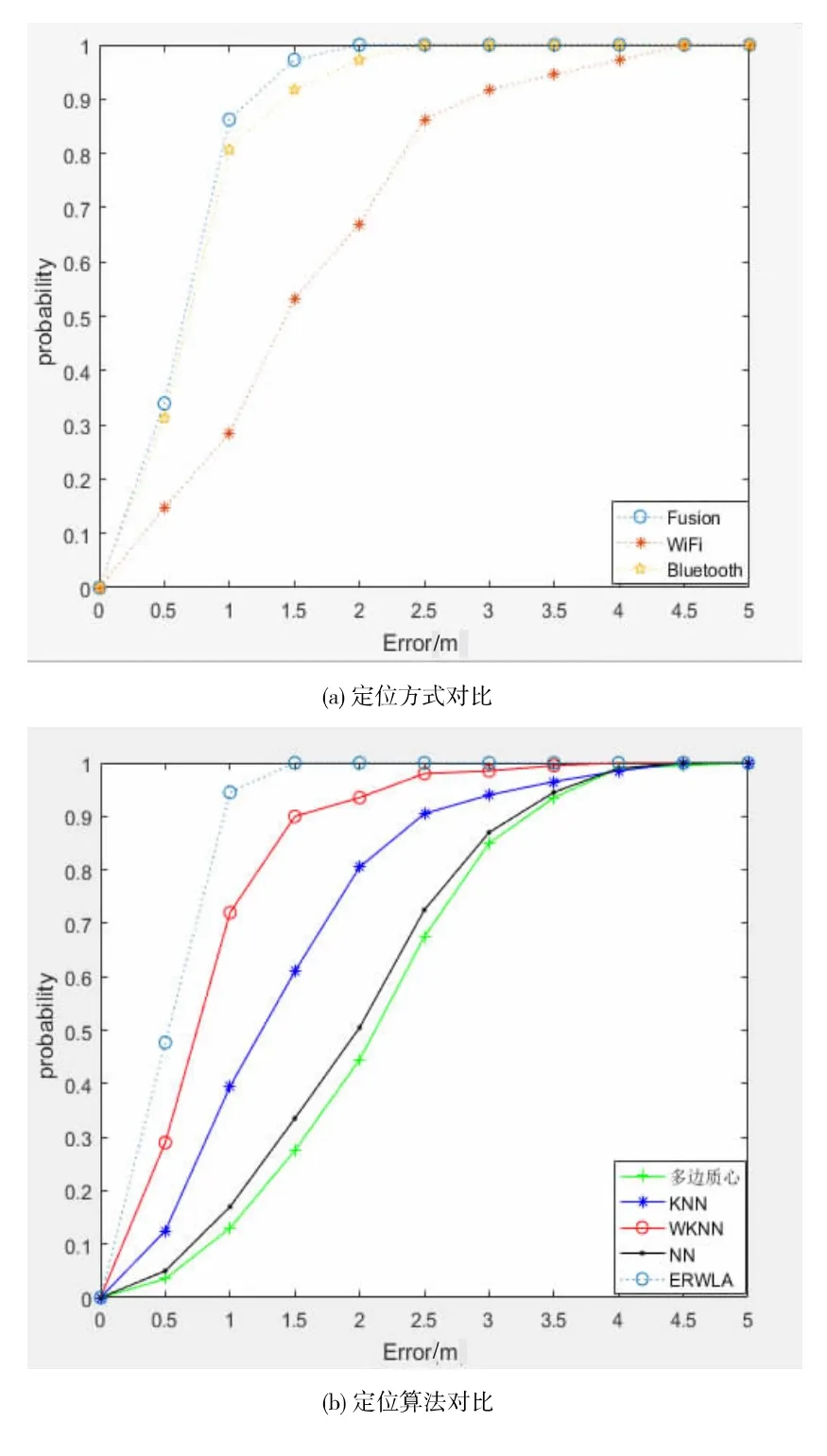
圖7 定位結果累積誤差分布圖
由圖7(a) 可知: (1) 單獨的WiFi 定位平均誤差為2.440 m,在誤差為2.4 m 時,定位精度能夠達到80%;(2) 單獨的藍牙定位平均誤差為0.894 m,在誤差為0.99 m 時,定位精度達到80%;(3) 本文提出的WiFi 和藍牙融合定位平均誤差為0.689 m,在誤差為0.89 m時,定位精度就已經達到了80%,實驗結果充分表明融合定位極大地提高了定位精度。WiFi 和藍牙融合定位相較于單獨的WiFi 定位和單獨的藍牙定位,精度分別提升了71.8%、22.9%。
由于室內定位存在多徑效應,無法完全消除,只能通過算法減少其影響。圖7(b) 顯示了分別采用WiFi 多邊測量質心法、近鄰(NN) 算法、K-近鄰(KNN) 算法、加權K-近鄰(WKNN) 算法和ERWLA,在減少室內定位的多徑效應影響時,得到的誤差累積分布對比。這些算法分別在誤差為3.1 m、2.8 m、2.4 m、1.35 m、0.8 m 時,定位精度達到80%。在誤差為5 m 時,幾種定位算法的概率基本都到達了1。多邊質心算法把當前接受到的四個RSSI 值等同看待,忽略了室內的多徑效應產生的誤差,因此定位精度較低; 近鄰(NN) 算法是采用RSSI 指紋法,相對于多邊測量,精度稍有提高;K-近鄰(KNN) 算法選擇K 個臨近節點,相比NN 算法,定位精度顯著提高;而加權K-近鄰(WKNN) 算法先進行粗定位,給K 個臨近參考點設置權重,與KNN 比較,精度和穩定性都得到了較大的提升。由圖7(b) 可知,本文提出的算法ERWLA 在1 m 時,定位精度達即可達到95%,與其他算法相比較,ERWLA 定位精度優勢明顯。
本文是基于WiFi 和藍牙融合的室內定位算法,無論是算法融合還是MLS 插值擬合都是自適應的。由蒙特卡羅實驗建立的融合定位誤差模型如圖8 所示,清晰地顯示出本文的ERWLA 算法具有明顯的優越性。由圖8 可知,多邊質心算法把當前點接受到的四個RSSI 值等同看待,忽略了室內的多徑效應。近鄰(NN) 算法,每個參考點一個指紋信息,但是同一點的RSSI 值是多變的,在多徑效應下,室內環境對定位誤差影響很大。K-近鄰(KNN) 算法,在線指紋庫匹配K 個最相近的參考節點,求其中心位置作為定位結果,其忽略了指紋變量對定位結果的影響,也忽略了定位點四個接受信號的多徑效應。加權K-近鄰(WKNN) 算法通過自適應調整權值來進行加權定位,但定位精度過分依賴于加權函數和指紋庫匹配的參考點。本文的算法采取自適應的融合方法,可以通過自適應調整權值來進行加權融合。再采用區域加權的MLSI 算法擬合參考點誤差,考慮了室內多徑效應產生的誤差區域化,具有更高的定位精度和穩定性。
3 結束語
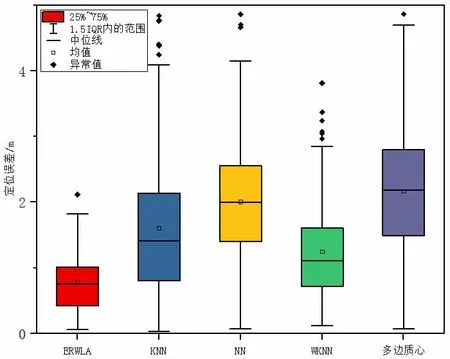
圖8 不同算法的定位結果
采用三維坐標進行多邊測量,獲得模型定位的可取二維區域,相比于二維坐標,能夠減少空間距離帶來的誤差。對WiFi 和藍牙定位進行可取區域加權融合,相比單獨定位算法,不僅提高了定位精度,而且通過建立定位誤差模型明顯減小了噪聲的影響,抗干擾性增強。利用MLSI 算法對定位誤差進行擬合,并通過設置置信區域對誤差函數進行加權,相比于誤差無偏估計更加適應復雜的室內環境。此外,將客戶反映較好的眾包節點用來定時更新誤差擬合的參考節點,大大地減少了后期勘測維護的成本。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
今日農業(2021年9期)2021-11-26 07:41:24
中老年保健(2021年11期)2021-08-22 03:15:44
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44