車(chē)隊(duì)控制中的一種通用可變時(shí)距策略
2019-08-21 03:29:02于曉海郭戈
自動(dòng)化學(xué)報(bào) 2019年7期
關(guān)鍵詞:策略
于曉海 郭戈
智能交通系統(tǒng)(Intelligent transportation system,ITS)是未來(lái)實(shí)現(xiàn)高效、環(huán)保、經(jīng)濟(jì)交通出行的重要技術(shù)[1?2],尤其是幾乎所有城市都在面臨嚴(yán)峻的交通擁堵和空氣污染問(wèn)題,因此,從交通管理部門(mén)、企業(yè)界到學(xué)術(shù)界都非常關(guān)注智能交通系統(tǒng)相關(guān)技術(shù)研究[3?4].作為ITS技術(shù)的重要組成,車(chē)輛隊(duì)列行駛控制(也稱(chēng)道路火車(chē))技術(shù)使同車(chē)道的車(chē)輛以較小的安全距離列隊(duì)行駛,從而減小車(chē)輛行駛中的空氣阻力,可大幅降低油耗,提高道路容量及交通流量,緩解交通擁堵.因此,車(chē)隊(duì)行駛技術(shù)受到越來(lái)越多的關(guān)注[5?6].
車(chē)隊(duì)中的車(chē)輛相互耦合,任何擾動(dòng)引起的操作誤差,有可能沿車(chē)隊(duì)向后傳播放大,導(dǎo)致車(chē)隊(duì)跟蹤性能下降甚至不穩(wěn)定,因而帶來(lái)嚴(yán)重的后果.車(chē)隊(duì)行駛控制的關(guān)鍵在于設(shè)計(jì)一個(gè)合理的車(chē)輛間距策略,這直接關(guān)系著車(chē)隊(duì)整體穩(wěn)定及全局交通流的穩(wěn)定性和交通效率[7].常見(jiàn)的間距策略包括固定間距策略(Constant spacing policy,CSP)、可變間距策略(Variable spacing policy,VSP),其中可變間距策略又分為固定時(shí)距策略(Constant time headway policy,CTHP)(或固定時(shí)隙策略)和可變時(shí)距策略(Variable time headway policy,VTHP)兩種.
固定間距策略最為常用,可實(shí)現(xiàn)較小的車(chē)間距,從而使車(chē)隊(duì)控制的優(yōu)點(diǎn)最大化.但是,固定間距策略要求車(chē)輛間的信息交換與反饋及時(shí)可靠,當(dāng)車(chē)輛間的通信不穩(wěn)定或受限時(shí),固定間距策略不能保證車(chē)輛隊(duì)列穩(wěn)定性.采用固定間距策略的研究文獻(xiàn)很多,其中,文獻(xiàn)[8]分析并對(duì)比了固定間距下不同拓?fù)浣Y(jié)構(gòu)的車(chē)隊(duì)控制方法,文獻(xiàn)[9]研究了雙向異質(zhì)信息反饋時(shí)的車(chē)輛隊(duì)列控制問(wèn)題,文獻(xiàn)[10]給出了傳感器測(cè)量距離受限時(shí)的車(chē)輛隊(duì)列控制方法,文獻(xiàn)[11]考慮通信延時(shí),提出一種新型固定間距策略及相應(yīng)的車(chē)隊(duì)控制方法,文獻(xiàn)[12]基于車(chē)輛動(dòng)力學(xué)不確定性以及車(chē)間一致通信延遲,將一種H∞控制方法應(yīng)用于異質(zhì)車(chē)隊(duì)中,確保了車(chē)隊(duì)的魯棒性、跟蹤性與隊(duì)列穩(wěn)定性,文獻(xiàn)[13]提出一種狀態(tài)預(yù)測(cè)與反饋控制相結(jié)合的車(chē)隊(duì)控制方法,該方法可對(duì)無(wú)線通信環(huán)境不理想情況下的信息傳輸延遲進(jìn)行補(bǔ)償,并進(jìn)一步發(fā)現(xiàn)最大可延遲時(shí)間由車(chē)隊(duì)拓?fù)浣Y(jié)構(gòu)的最大特征值所決定,與此同時(shí),通過(guò)LMI(Linear maxtrix inequality)方法獲得了較好的車(chē)隊(duì)魯棒性.
為克服固定間距策略下的車(chē)隊(duì)控制對(duì)信息反饋和通信可靠性與實(shí)時(shí)性要求高的問(wèn)題,可采用固定時(shí)距策略,此時(shí)車(chē)輛無(wú)需實(shí)時(shí)通信,只需后車(chē)與前車(chē)保持一個(gè)固定的行駛時(shí)間距離.這種方法易于分析與設(shè)計(jì),也能確保單車(chē)及隊(duì)列穩(wěn)定性,但車(chē)速較高時(shí),車(chē)間距往往較大,不利于發(fā)揮車(chē)隊(duì)控制在降低油耗和提高道路利用率等方面的優(yōu)越性,而且文獻(xiàn)[14]指出該策略存在交通流不穩(wěn)定情況,從而帶來(lái)交通擁堵、車(chē)隊(duì)失控等安全隱患.采用固定時(shí)距策略的研究文獻(xiàn)也比較多,文獻(xiàn)[15]研究了多種拓?fù)浣Y(jié)構(gòu)下異質(zhì)車(chē)隊(duì)的自適應(yīng)控制與辨識(shí),文獻(xiàn)[16]提出一種能克服傳感器/執(zhí)行器延遲的自適應(yīng)巡航控制方法,文獻(xiàn)[17]針對(duì)加速度不確定的非線性車(chē)隊(duì),提出一種可以消除初始條件干擾、減小車(chē)間距的自適應(yīng)滑模控制方法,文獻(xiàn)[18]基于Lp范數(shù),在車(chē)隊(duì)控制中采用一種新的隊(duì)列穩(wěn)定性定義,可用于線性或非線性系統(tǒng),并可獨(dú)立于車(chē)隊(duì)拓?fù)浣Y(jié)構(gòu)進(jìn)行分析,同時(shí)對(duì)初始條件攝動(dòng)及外部擾動(dòng)也能較好適應(yīng),文獻(xiàn)[19]考慮異質(zhì)擾動(dòng)及飽和約束條件,并根據(jù)Lp隊(duì)列穩(wěn)定性,提出一種前饋與反饋相結(jié)合的車(chē)隊(duì)控制新方法,有別于傳統(tǒng)分布式模型預(yù)測(cè)控制以及單純魯棒反饋控制,該方法通過(guò)事件觸發(fā)機(jī)制顯著降低車(chē)間通信頻率與規(guī)劃計(jì)算成本,在減少控制器保守性的同時(shí),取得了更好的控制效果.
近年來(lái),在固定間距和固定時(shí)距策略的基礎(chǔ)上,出現(xiàn)了一些基于可變時(shí)距策略的車(chē)隊(duì)控制方法.文獻(xiàn)[20]設(shè)計(jì)了一種減小鄰車(chē)間距、提高交通容量的自適應(yīng)控制方法,文獻(xiàn)[21]提出一種降低油耗并保證車(chē)隊(duì)穩(wěn)定的PID控制方法,文獻(xiàn)[22]給出一種多工況異質(zhì)車(chē)隊(duì)避碰的控制方法,文獻(xiàn)[23]基于虛擬前車(chē),提出一種減小瞬態(tài)響應(yīng)時(shí)間與間距誤差的車(chē)隊(duì)控制方法,文獻(xiàn)[24?25]給出一種確保單車(chē)及隊(duì)列穩(wěn)定的LMI方法.這些方法通過(guò)改變車(chē)間行駛時(shí)距,及時(shí)調(diào)控/優(yōu)化車(chē)間距,從而提高道路利用率、節(jié)約燃油,保證車(chē)隊(duì)穩(wěn)定性、安全性和速度響應(yīng).但相關(guān)文獻(xiàn)并未提出可變時(shí)距策略的一般性分析方法,也缺乏在不同工況下將可變時(shí)距策略轉(zhuǎn)換為固定間距、固定時(shí)距策略的兼容性研究,因此應(yīng)用范圍有限、通用性不高.
另外,在車(chē)隊(duì)穩(wěn)定的同時(shí),能否保持交通流暢即交通流是否穩(wěn)定,也缺少必要的分析.基于此,文獻(xiàn)[26?27]進(jìn)一步考慮交通流穩(wěn)定性,其中,文獻(xiàn)[26]根據(jù)駕駛員經(jīng)驗(yàn)擬合曲線得到車(chē)間行駛時(shí)距,給出一種改進(jìn)的交通流及隊(duì)列穩(wěn)定的車(chē)隊(duì)控制方法,文獻(xiàn)[27]為滿足穩(wěn)定性分析通過(guò)抽象指數(shù)函數(shù)得到可變行駛時(shí)距,提出一種交通流及車(chē)隊(duì)穩(wěn)定的PID控制方法.
需要指出的是,已有的各種車(chē)間距策略各有優(yōu)劣,適用于不同的車(chē)隊(duì)構(gòu)成、道路及通信條件.本文旨在給出一種統(tǒng)一形式的車(chē)間距策略,既兼?zhèn)涓鞣N已有車(chē)間距策略的優(yōu)點(diǎn),又可通過(guò)參數(shù)的選擇適用于各種不同工況條件.另外,已有多數(shù)文獻(xiàn)只考慮了單車(chē)及隊(duì)列穩(wěn)定性,并未考慮交通流穩(wěn)定性,可能導(dǎo)致交通擁堵和車(chē)隊(duì)失控等問(wèn)題.第三,文獻(xiàn)[26?27]雖考慮了交通流穩(wěn)定性,但可變行駛時(shí)距需根據(jù)經(jīng)驗(yàn)或抽象函數(shù)才能得到,缺乏準(zhǔn)確性、物理意義不明確,不利于實(shí)際應(yīng)用.本文的主要貢獻(xiàn)包括:
1)給出車(chē)隊(duì)可變時(shí)距策略的一般形式,并通過(guò)可變行駛時(shí)距參數(shù)的選擇來(lái)兼容固定間距策略、固定時(shí)距策略,建立統(tǒng)一的車(chē)間距誤差模型,得到不同工況下車(chē)隊(duì)的綜合性能;
2)除單車(chē)與隊(duì)列穩(wěn)定外,特別考慮了通用可變時(shí)距策略的交通流穩(wěn)定性,綜合設(shè)計(jì)控制器,從而保證車(chē)隊(duì)行駛安全暢通,并將分析方法推廣到固定時(shí)距與固定間距策略中;
3)提出一種物理意義明確的可變行駛時(shí)距計(jì)算方法,并結(jié)合車(chē)隊(duì)與交通流穩(wěn)定條件,得到可變行駛時(shí)距的變化界限,便于車(chē)隊(duì)準(zhǔn)確快速響應(yīng).
后續(xù)內(nèi)容:第1節(jié),系統(tǒng)建模及本文目標(biāo);第2節(jié),車(chē)隊(duì)與交通流穩(wěn)定性分析與綜合;第3節(jié),仿真對(duì)比各間距策略性能;第4節(jié)為結(jié)論.
1 系統(tǒng)建模及目標(biāo)
如圖1,若同質(zhì)車(chē)隊(duì)中車(chē)輛動(dòng)力學(xué)特性為式(1),其中各參數(shù)定義見(jiàn)表1.

圖1 車(chē)隊(duì)間距控制(虛線代表信息傳輸方向)Fig.1 Spacing control of the platoon(The dotted line represents the direction of information transmission.)
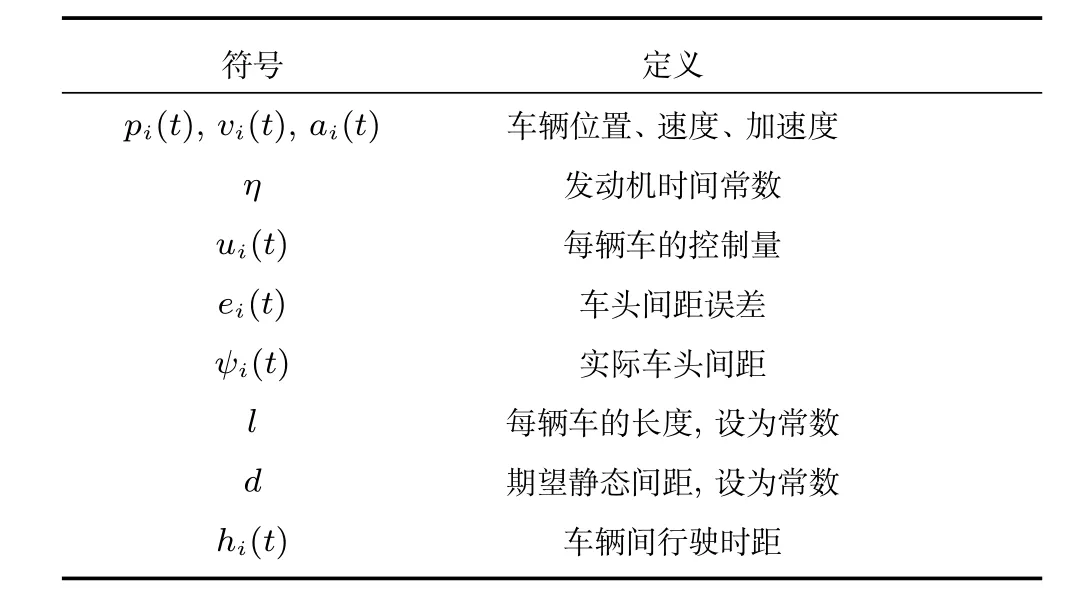
表1 車(chē)隊(duì)參數(shù)說(shuō)明Table 1 Platoon parameters explanation
注 1.表中i={0,1,···,n},為車(chē)輛索引號(hào).其中,領(lǐng)隊(duì)車(chē)為0號(hào).

本文所提出的通用可變時(shí)距策略為:

基于式(2),建立統(tǒng)一的車(chē)間距誤差模型:

注2.根據(jù)式(2)中hi(t)參數(shù)的不同取值,可使固定時(shí)距與固定間距策略作為可變時(shí)距策略的應(yīng)用特例,從而實(shí)現(xiàn)不同間距策略的兼容.當(dāng)hi(t)=c(正常數(shù))時(shí),可變時(shí)距策略轉(zhuǎn)換為固定時(shí)距策略,此時(shí)車(chē)間距誤差為式(4);而hi(t)=0時(shí),可變時(shí)距策略轉(zhuǎn)換為固定間距策略,車(chē)間距誤差為式(5).
本文控制目標(biāo)如下:
1)單車(chē)穩(wěn)定,指車(chē)隊(duì)中每輛車(chē)漸近穩(wěn)定,也稱(chēng)車(chē)隊(duì)內(nèi)部車(chē)輛穩(wěn)定,此時(shí):

2)隊(duì)列穩(wěn)定,指領(lǐng)隊(duì)車(chē)受擾動(dòng)時(shí),車(chē)間距誤差不向上游車(chē)輛放大傳遞,保持車(chē)隊(duì)整體穩(wěn)定[28],即:

3)交通流穩(wěn)定,指車(chē)隊(duì)穩(wěn)態(tài)時(shí),交通流量(q)關(guān)于交通流密度(ρ)的梯度為正,即:

為便于研究,假設(shè)車(chē)隊(duì)滿足以下條件:
假設(shè)1.車(chē)隊(duì)沿單車(chē)道直線行駛,領(lǐng)隊(duì)車(chē)可實(shí)時(shí)機(jī)動(dòng).
假設(shè)2.每輛車(chē)安裝高精度的車(chē)載雷達(dá),時(shí)刻感知與前車(chē)的相對(duì)位置、相對(duì)速度.
假設(shè)3.分析單車(chē)穩(wěn)定時(shí),期望加速度可瞬時(shí)傳遞給執(zhí)行機(jī)構(gòu),即ui(t)=ai(t).
2 車(chē)隊(duì)與交通流穩(wěn)定性分析
由于式(2)中hi(t)時(shí)變,為便于穩(wěn)定性分析,令f(vi(t))=hi(t)vi(t),并代入式(3)有:

根據(jù)假設(shè)2,控制器設(shè)計(jì)為:

其中,kpi、kvi為第i輛車(chē)的待定控制增益.
2.1 單車(chē)穩(wěn)定性
定理 1.若車(chē)隊(duì)采用式(2)車(chē)間距策略及式(10)控制器,則單車(chē)漸近穩(wěn)定即式(6)成立,需滿足:

其中,σ為待定正數(shù).
證明.
由式(6)知,單車(chē)漸近穩(wěn)定時(shí)有:

對(duì)式(9)兩端同時(shí)求導(dǎo):

聯(lián)合式(12)和式(13),得期望加速度:

由假設(shè)3得式(11)成立.
推論1.若車(chē)隊(duì)控制器結(jié)構(gòu)同定理1,并分別選擇固定時(shí)距或固定間距策略,則單車(chē)穩(wěn)定需滿足:
其中,σ1為待定正數(shù).
證明.
1)固定時(shí)距策略時(shí),由式(4)和式(9)得:
按照定理1的推導(dǎo),將式(16)代入式(14)并將σ替換為σ1,即得kpi、kvi.
2)固定間距策略時(shí),由式(5)和式(9)知:

此時(shí),結(jié)合式(10)、(13)和式(17)及假設(shè)3有:

又由式(1)、(3)和式(18)得車(chē)間距誤差閉環(huán)模型:

對(duì)式(19)進(jìn)行拉氏變換,并根據(jù)勞斯穩(wěn)定判據(jù)知:當(dāng)kpi、kvi為正時(shí),單車(chē)漸近穩(wěn)定.
2.2 隊(duì)列穩(wěn)定性
車(chē)隊(duì)行駛過(guò)程中,在平衡點(diǎn)vi(t)=ve處,對(duì)式(9)進(jìn)行線性化,并忽略高階項(xiàng)有:
將式(20)簡(jiǎn)化為:

其中

定理2.若車(chē)隊(duì)所采用的車(chē)間距策略及控制器同定理1,則隊(duì)列穩(wěn)定即式(7)成立,需滿足:

證明.對(duì)式(21)左右兩端同時(shí)求導(dǎo):

再對(duì)式(23)求導(dǎo),并結(jié)合式(1)有:

將式(10)、(11)和式(23)代入式(24)有:

進(jìn)而
又由式(1)、(3)和式(21)得:

對(duì)式(27)兩端同時(shí)求二階導(dǎo)數(shù)有:

比較式(26)和式(28)得:


對(duì)式(30)兩端同時(shí)進(jìn)行拉氏變換,得:
由式(7)知,隊(duì)列穩(wěn)定需|G(jω)|<1,結(jié)合式(31)有:

經(jīng)計(jì)算得:

根據(jù)式(33)有:

由式(34)解得:


推論2.若車(chē)隊(duì)控制器結(jié)構(gòu)同定理2,并分別選擇固定時(shí)距或固定間距策略,則隊(duì)列穩(wěn)定需滿足:式(22)或式(36)成立.
證明.
1)固定時(shí)距策略時(shí),由于式(4)和式(21)結(jié)構(gòu)相同,且均使用同類(lèi)控制器,因此按照定理2的證明過(guò)程,可得隊(duì)列穩(wěn)定條件為:
c>2η,結(jié)合式(15)同樣有式(22)成立.
2)固定間距策略時(shí),根據(jù)式(1)、(3)、(5)及(10)有:

對(duì)比式(30)并使用相同方法,則隊(duì)列穩(wěn)定需滿足:

化簡(jiǎn)為:

根據(jù)式(39)解得式(36)成立.
注3.將式(15)與(36)相比較,可知自主行駛時(shí)固定間距策略不能同時(shí)實(shí)現(xiàn)單車(chē)與隊(duì)列穩(wěn)定,故后續(xù)不再考慮其交通流穩(wěn)定性.
2.3 交通流穩(wěn)定性
定理 3.若車(chē)隊(duì)所采用的車(chē)間距策略及控制器同定理1,則交通流穩(wěn)定即式(8)成立,需滿足:

證明.通過(guò)式(9)得穩(wěn)態(tài)車(chē)頭間距為:

其中,vs為車(chē)隊(duì)穩(wěn)態(tài)速度,此時(shí)穩(wěn)態(tài)交通流密度:

由式(42)得:

因此

由穩(wěn)態(tài)交通流量q=ρvs,有:

聯(lián)合式(44)和式(45)得:

將式(11)、(22)與式(46)相結(jié)合有:

于是,

若同時(shí)滿足式(8)和式(49),則式(40)成立.
推論3.若車(chē)隊(duì)控制器結(jié)構(gòu)同定理3,并選擇固定時(shí)距策略,則交通流不穩(wěn)定.
證明.根據(jù)式(4),此時(shí)穩(wěn)態(tài)車(chē)頭間距為:

與式(41)比較有:

將式(51)代入式(44),并聯(lián)合式(45)得:

對(duì)任意交通流密度,式(52)中?q/?ρ均為負(fù)值,通過(guò)式(8)知,此時(shí)交通流不穩(wěn)定.
定理4.若車(chē)隊(duì)所采用的車(chē)間距策略及控制器同定理1,且車(chē)間可變行駛時(shí)距采用式(53),則單車(chē)、隊(duì)列及交通流穩(wěn)定,需滿足式(54):

其中,c1和μ為待定正數(shù).
證明.由式(9)中f(vi(t))定義及式(53)得:

根據(jù)定理1和2中式(11)與式(22)有:

又由式(42)和式(55)知,穩(wěn)態(tài)交通流密度為:

結(jié)合定理3中式(40),得:

聯(lián)合式(56)與式(58),得式(54)成立.
注4.由式(53)可準(zhǔn)確計(jì)算出車(chē)間可變行駛時(shí)距,并且該計(jì)算方法具有明確的物理含義:當(dāng)前車(chē)速度更快時(shí),車(chē)間行駛時(shí)距可適當(dāng)減小;反之,需增加車(chē)間行駛時(shí)距.
3 仿真對(duì)比
為檢驗(yàn)上述設(shè)計(jì)方法,選擇由1輛領(lǐng)隊(duì)車(chē)和5輛跟隨車(chē)構(gòu)成車(chē)隊(duì)進(jìn)行計(jì)算機(jī)仿真,具體仿真參數(shù)見(jiàn)表2.假設(shè)每輛車(chē)發(fā)動(dòng)機(jī)時(shí)間常數(shù)為η=0.3秒,初速度為17米/秒即61.2公里/小時(shí),鄰車(chē)間靜態(tài)車(chē)頭間距為8米.

表2 仿真參數(shù)Table 2 Simulation parameters
領(lǐng)隊(duì)車(chē)機(jī)動(dòng)過(guò)程如圖2所示,首先勻速前進(jìn)2秒,再給1.5米/秒2的加速度3秒并保持勻速,之后以?1米/秒2減速3秒,然后勻速行駛,最后以0.75米/秒2加速2秒.由于領(lǐng)隊(duì)車(chē)不斷機(jī)動(dòng)行駛,給整個(gè)車(chē)隊(duì)帶來(lái)擾動(dòng),從而使跟隨車(chē)不斷調(diào)節(jié)與前車(chē)間距,保證行駛安全.本文將固定間距策略、固定時(shí)距策略以及可變時(shí)距策略進(jìn)行對(duì)比仿真,如圖3所示.

圖2 領(lǐng)隊(duì)車(chē)速度、加速度Fig.2 Leading vehicle velocity and acceleration

圖3 車(chē)間距策略比較(第1~3列圖分別采用固定間距、固定時(shí)距以及可變時(shí)距策略)Fig.3 Comparison results with different spacing policies(CSP,CTHP and VTHP are used for column 1 to 3 of the diagram respectively.)
圖3(a1)~(a3)是鄰車(chē)間距誤差變化情況.其中,各車(chē)間距策略的穩(wěn)態(tài)誤差均可收斂到零,以保證單車(chē)漸近穩(wěn)定.另外,固定間距策略誤差較大,最大值為4.30米且e1~e5依次放大、隊(duì)列不穩(wěn)定,存在碰撞的可能,而固定時(shí)距與可變時(shí)距策略誤差較小,最大為0.36米、0.30米且隊(duì)列穩(wěn)定.相對(duì)于固定時(shí)距策略,可變時(shí)距策略的誤差曲線更加平滑.
圖3(b1)~(b3)為車(chē)輛位置關(guān)系.固定間距策略隊(duì)形緊密,車(chē)間距在8米左右,但分布不均勻,第3秒、第27秒相對(duì)較窄,易產(chǎn)生位置重疊發(fā)生碰撞,而另兩策略的車(chē)輛行駛位置基本保持勻稱(chēng),車(chē)間距分別為23.5米、20米左右,車(chē)隊(duì)行駛安全.
圖3(c1)~(c3)是跟隨車(chē)的速度變化情況.固定時(shí)距與可變時(shí)距策略的速度跟蹤效果較好,而固定間距策略誤差較大,最大誤差為1.65米/秒.
圖3(d1)~(d3)是跟隨車(chē)加速度變化情況.固定間距策略誤差較大,且第12秒、第26秒及第42秒存在波動(dòng),而另兩策略的加速度曲線跟蹤較緩和,可變時(shí)距策略跟蹤精度更高、響應(yīng)更快.
圖3(e1)~(e3)是跟隨車(chē)的抖動(dòng)比較.各車(chē)間距策略的抖動(dòng)趨勢(shì)基本一致,其中固定間距、固定時(shí)距策略最大抖動(dòng)為1.2米/秒3、1.25米/秒3,而可變時(shí)距策略約為1.5米/秒3.由于可變時(shí)距策略對(duì)加速度具有更好的跟蹤精度,因此抖動(dòng)稍大.但從抖動(dòng)時(shí)長(zhǎng)來(lái)看,可變時(shí)距策略最短,在第12~18秒、第22~29秒基本無(wú)抖動(dòng),而另兩策略無(wú)抖動(dòng)時(shí)間較短.綜上所述,車(chē)隊(duì)綜合性能見(jiàn)表3.

表3 車(chē)隊(duì)綜合性能Table 3 Comprehensive performance of the platoon
通過(guò)表3可知,對(duì)通信受限的車(chē)隊(duì)而言,由于固定間距策略不能保證隊(duì)列穩(wěn)定性,因此領(lǐng)隊(duì)車(chē)速變化所產(chǎn)生的擾動(dòng)直接作用于車(chē)隊(duì),從而整體性能較固定時(shí)距與可變時(shí)距策略更弱;而固定時(shí)距策略,由于所選擇的鄰車(chē)間行駛時(shí)距為定值,因此車(chē)隊(duì)高速行駛時(shí),車(chē)間距較大,從而降低道路利用率、增加燃油消耗,并且產(chǎn)生交通流不穩(wěn)定以及道路擁堵等情況,帶來(lái)安全隱患;本文所采用的可變時(shí)距策略,根據(jù)鄰車(chē)間相對(duì)速度的變化,實(shí)時(shí)調(diào)節(jié)車(chē)間行駛時(shí)距,從而不斷優(yōu)化鄰車(chē)間距,這樣可以克服固定時(shí)距策略的上述問(wèn)題,保證交通流暢、高效環(huán)保,因此具有更優(yōu)的性能.
4 結(jié)論
本文將一種通用可變時(shí)距策略應(yīng)用于通信受限條件下的車(chē)隊(duì)控制,根據(jù)鄰車(chē)間相對(duì)位置、相對(duì)速度及可變行駛時(shí)距參數(shù),設(shè)計(jì)形式統(tǒng)一的車(chē)間距策略及其誤差模型,該模型能較好兼容已有車(chē)間距策略.基于這種通用可變時(shí)距策略進(jìn)行了單車(chē)與隊(duì)列穩(wěn)定性分析,并針對(duì)當(dāng)前交通擁堵現(xiàn)狀,進(jìn)一步研究了交通流穩(wěn)定性,同時(shí)將上述分析方法進(jìn)行推廣,綜合設(shè)計(jì)控制器.從應(yīng)用角度,給出一種物理含義清晰、計(jì)算準(zhǔn)確快速的可變行駛時(shí)距形式,結(jié)合穩(wěn)定性條件得到其變化界限.從仿真結(jié)果來(lái)看,該通用可變時(shí)距策略在車(chē)間距安全、隊(duì)列保持、交通流穩(wěn)定、速度與加速度跟蹤以及抖動(dòng)時(shí)長(zhǎng)等方面,具有較好的控制效果;而固定時(shí)距策略能實(shí)現(xiàn)單車(chē)與隊(duì)列穩(wěn)定,但交通流不穩(wěn)定,可能產(chǎn)生交通擁堵,帶來(lái)安全隱患;對(duì)于通信受限的自主車(chē)隊(duì)而言,雖然固定間距策略可實(shí)現(xiàn)較小車(chē)間距,但不能保證單車(chē)與隊(duì)列同時(shí)穩(wěn)定,存在車(chē)輛碰撞的可能.
后續(xù)研究將進(jìn)一步考慮協(xié)作車(chē)隊(duì)的可變時(shí)距策略,特別是非線性可變時(shí)距策略的特性研究,并探討隊(duì)列擴(kuò)展、通信中繼以及無(wú)線通信不穩(wěn)定情況下的車(chē)隊(duì)控制等相關(guān)課題.
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:42
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
小學(xué)生作文(低年級(jí)適用)(2018年9期)2018-10-08 02:29:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國(guó)衛(wèi)生(2016年8期)2016-11-12 13:26:50