基于新型滑模算法的雙擺旋轉(zhuǎn)起重機消擺跟蹤控制
2019-08-21 03:29:06歐陽慧珉王健張廣明梅磊鄧歆
自動化學(xué)報 2019年7期
歐陽慧珉 王健 張廣明 梅磊 鄧歆
旋轉(zhuǎn)起重機作為常見的起重機械,由于其結(jié)構(gòu)簡單、占用空間小、無需大型行走設(shè)備等優(yōu)點,因此被廣泛地應(yīng)用于建筑工地、礦山、港口等場合.然而,旋臂的加減速會使負(fù)載產(chǎn)生擺動,不僅降低了生產(chǎn)效率,而且會損壞貨物,造成人員傷亡等.針對該問題,已經(jīng)有學(xué)者作了大量的研究,并且提出了許多有效的方法[1?19].但是,當(dāng)負(fù)載形狀不規(guī)則或者吊鉤的質(zhì)量不能忽視時,該擺動會呈現(xiàn)出更加復(fù)雜的兩級擺動現(xiàn)象.該現(xiàn)象極大地增加了系統(tǒng)特性分析和控制器設(shè)計的難度,因此如何設(shè)計出可以有效抑制兩級擺動的控制算法問題已經(jīng)成為學(xué)術(shù)界和產(chǎn)業(yè)界研究的難點和熱點.
近年來,已經(jīng)有學(xué)者針對起重機系統(tǒng)雙擺抑制問題展開了一些研究[20?35].Tang等針對2-D雙擺橋式起重機系統(tǒng)中由于臺車運動和外部風(fēng)干擾而引起的荷載擺動,提出了結(jié)合兩種運動軌跡的方法,即其中一個軌跡用來抑制臺車運動引起的擺動,另一個軌跡用來抑制風(fēng)干擾引起的擺動,仿真與實驗驗證了該方法的有效性[20].陳鶴等針對雙擺橋式吊車系統(tǒng)提出了一種時間最優(yōu)軌跡規(guī)劃方法,該方法在構(gòu)造以時間為代價函數(shù)的基礎(chǔ)上,將優(yōu)化問題轉(zhuǎn)化成非線性規(guī)劃問題,通過仿真與實驗驗證了該方法的有效性[21].Zhang等針對雙擺橋式起重機在線規(guī)劃了一條臺車軌道,該軌道由兩部分組成分別實現(xiàn)雙擺抑制和臺車定位,仿真驗證了該軌道對于參數(shù)變化和外部干擾具有魯棒性[22].Huang等針對2-D雙擺橋式起重機系統(tǒng)提出了一種新型指令整形方法,仿真與實驗驗證了該方法的有效性[23].孫寧等針對雙擺橋式吊車系統(tǒng)提出了一種基于軌跡規(guī)劃的消擺定位控制方法,該方法在充分考慮系統(tǒng)安全性(擺動幅值)等物理約束基礎(chǔ)上,通過構(gòu)造新穎的平坦輸出信號,將施加在臺車運動和兩級擺動上的約束/指標(biāo)轉(zhuǎn)化為對平坦輸出的約束,從而將軌跡規(guī)劃轉(zhuǎn)化為凸優(yōu)化問題,通過數(shù)值仿真驗證了該方法的有效性[24].Masoud等針對雙擺橋式起重機系統(tǒng)提出了一種頻率調(diào)制輸入整形方法,該方法是由一個基于閉環(huán)系統(tǒng)的第一階擺動頻率的輸入整形器和一個虛擬反饋控制環(huán)節(jié)構(gòu)成,仿真與實驗驗證了該方法的有效性[25].Maleki等針對雙擺旋轉(zhuǎn)起重機系統(tǒng)中存在兩級擺動模態(tài)的問題,提出了一種兩級模態(tài)特定不敏感輸入整形器,通過與兩級模態(tài)零擺動輸入整形器的比較驗證了該方法的有效性,同時也證明了其對旋臂旋轉(zhuǎn)角速度與角加速度變化具有魯棒性[26].Masoud等針對雙擺橋式起重機系統(tǒng)將輸入整形法和閉環(huán)控制法相結(jié)合,具體而言,首先基于假設(shè)的雙擺系統(tǒng)第一階模態(tài)設(shè)計基礎(chǔ)整形器,再設(shè)計一個虛擬的帶有積分器反饋控制器消除由第一階模態(tài)引起的殘留擺動,通過仿真與實驗驗證了該方法的有效性[27].Manning等針對2-D雙擺橋式起重機系統(tǒng)設(shè)計了一個SI2M(Two-mode specifiedinsensitivity)輸入整形器,并通過與ZV2M(Twomode zero vibration)輸入整形器比較驗證了所提方法對于繩長變化更具有魯棒性[28].Sung等針對2-D雙擺橋式起重機系統(tǒng)中應(yīng)用輸入整形技術(shù)進行消擺控制時關(guān)于參數(shù)變化的魯棒性問題,通過比較仿真和實驗指出SI2M 整形器性能最好[29].Qian等針對雙擺橋式起重機消擺控制問題,提出了一種基于SIRMs(Single-input-rule modules)的模糊控制器,比較仿真驗證了該方法的有效性[30].Ouyang等提出了一種基于LMI(Linear matrix inequality)的簡易魯棒控制器解決雙擺橋式起重機消擺控制問題[31].Zhang等考慮了起重機系統(tǒng)中參數(shù)不確定性等對控制性能的影響,提出了一個自適應(yīng)控制器,系統(tǒng)穩(wěn)定性通過李雅普諾夫定理和芭芭拉特引理進行分析,仿真結(jié)果驗證了其有效性[32].Tuan等針對雙擺橋式起重機消擺控制問題,提出了一個傳統(tǒng)滑模控制器和一個多層滑模控制器,仿真結(jié)果驗證了其有效性[33].Sun等針對雙擺橋式起重機消擺控制問題,提出了一種飽和非線性輸出反饋控制器和一種非線性準(zhǔn)PID控制,實驗結(jié)果驗證了其有效性[34?35].開環(huán)控制方式[20?29],即在設(shè)計控制器時不反饋擺角信息,如軌跡規(guī)劃法和基于輸入整形技術(shù)已經(jīng)應(yīng)用于雙擺橋式起重機系統(tǒng).這些方法雖然具有控制器結(jié)構(gòu)簡單,易于實現(xiàn)等優(yōu)點,但是它們過于依賴系統(tǒng)精確模型,當(dāng)系統(tǒng)受到外部干擾后控制性能會降低.另一方面,雖然如文獻[30?35]所提出的閉環(huán)控制方式可以為起重機系統(tǒng)提供魯棒或自適應(yīng)控制算法,但是由于它們的系統(tǒng)阻尼比大都設(shè)定為常數(shù).因此很難同時實現(xiàn)旋臂的高精度定位和兩級擺角的抑制.為此,本文將提出一種變阻尼的算法從而實現(xiàn)前述問題.進一步而言,不同于2-D橋式起重機的平面擺動,旋轉(zhuǎn)起重機系統(tǒng)中的雙擺均為圓錐擺,系統(tǒng)特性更加復(fù)雜.據(jù)筆者所知,到目前為止,尚無針對雙擺旋轉(zhuǎn)起重機擺角抑制的相關(guān)報道.
本文在建立雙擺旋轉(zhuǎn)起重機動力學(xué)模型的基礎(chǔ)上,采用干擾觀測器將其解耦成兩個獨立的線性系統(tǒng),即起伏子系統(tǒng)和旋轉(zhuǎn)子系統(tǒng).其次,基于此線性模型分別為其設(shè)計含有非線性滑模面的滑模控制器,并通過李雅普諾夫定理分析其穩(wěn)定性.最后比較仿真和定量分析驗證本文所提方法的有效性.
綜上,本文的主要創(chuàng)新之處可總結(jié)為如下幾點:
1)據(jù)筆者所知,首次將具有非線性滑模面的滑模控制器應(yīng)用于雙擺旋轉(zhuǎn)起重機系統(tǒng).
2)不同于傳統(tǒng)的線性滑模面,本文所提出的非線性滑模面可以為閉環(huán)系統(tǒng)提供一個可變的阻尼比,從而在提高旋臂定位精度的同時實現(xiàn)對兩級擺角的抑制.
1 雙擺旋轉(zhuǎn)起重機模型
在圖1所示旋轉(zhuǎn)起重機模型中M0,m1和m2分別表示旋臂質(zhì)量、吊鉤質(zhì)量和負(fù)載質(zhì)量;L,l1和l2分別表示旋臂長度、懸繩長度和吊繩長度;θ1和θ3分別表示吊鉤擺角和負(fù)載擺角在旋臂起伏方向上的分量;θ2和θ4分別表示吊鉤擺角和負(fù)載擺角在旋臂起伏方向上的分量;θ5和θ6則表示旋臂起伏角和旋轉(zhuǎn)角.
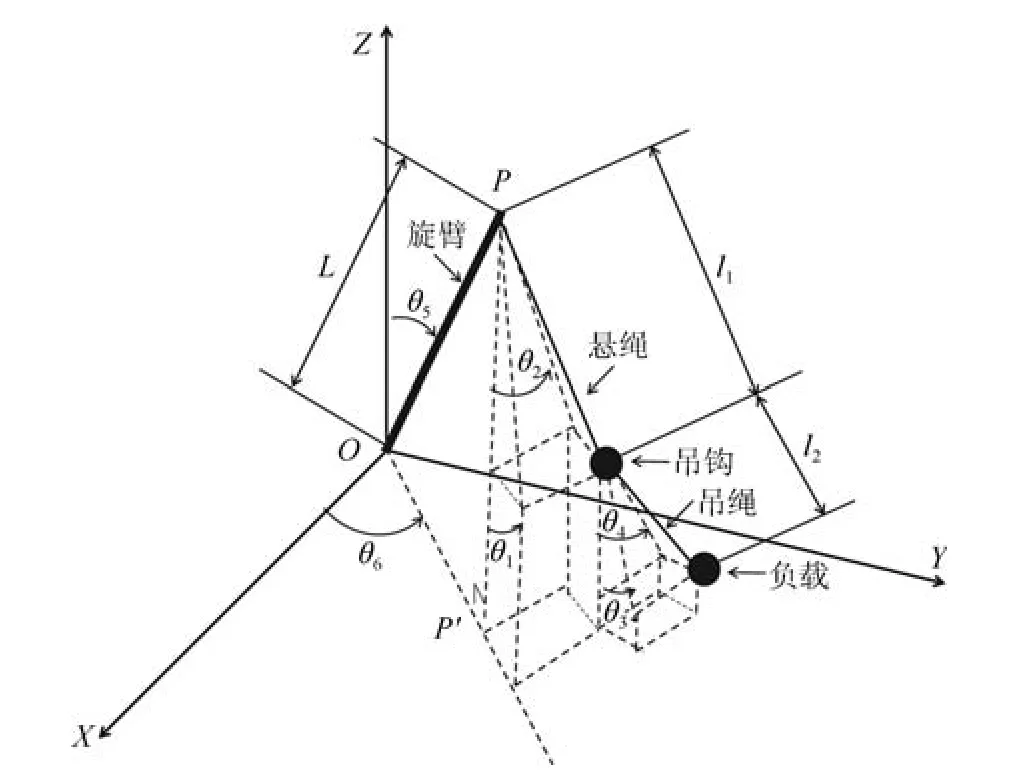
圖1 雙擺旋轉(zhuǎn)起重機模型Fig.1 Dynamic model of double-pendulum rotary crane
為了進一步分析和設(shè)計控制系統(tǒng),對旋轉(zhuǎn)起重機做如下幾點合理假設(shè)[1?3,6?8,28?31]:
1)吊鉤和負(fù)載均看作質(zhì)點,懸繩和吊繩的拉力和質(zhì)量忽略不計.

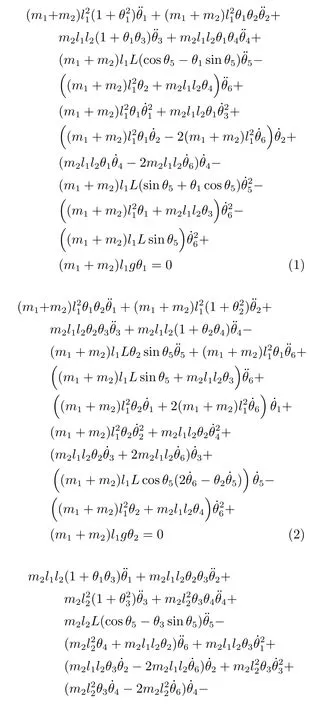
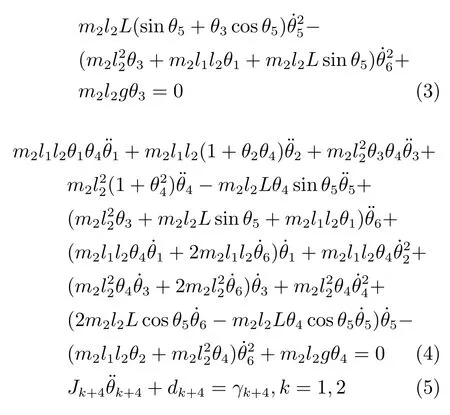
根據(jù)拉格朗日運動方程,雙擺旋轉(zhuǎn)起重機系統(tǒng)動力學(xué)模型如下所示:
為了方便設(shè)計控制器,采用了如圖2所示的干擾觀測器(Disturbance observer,DOB)[11,17,36?40].

圖2 含有干擾觀測器的控制系統(tǒng)Fig.2 Control system with a disturbance observer

式中,vk+4表示起伏子系統(tǒng)和旋轉(zhuǎn)子系統(tǒng)的控制輸入.
根據(jù)前述假設(shè),結(jié)合式(1)~(4)和式(6),可得,

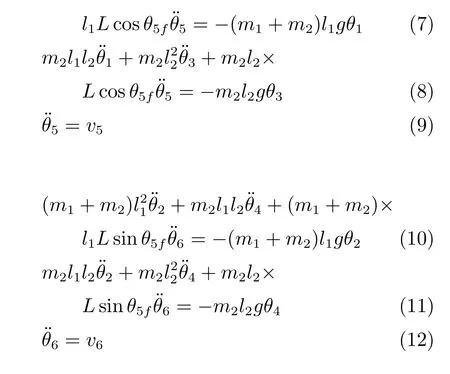
其中,θ5f為起伏角的目標(biāo)值.
式(7)~(12)寫成矩陣形式可得,
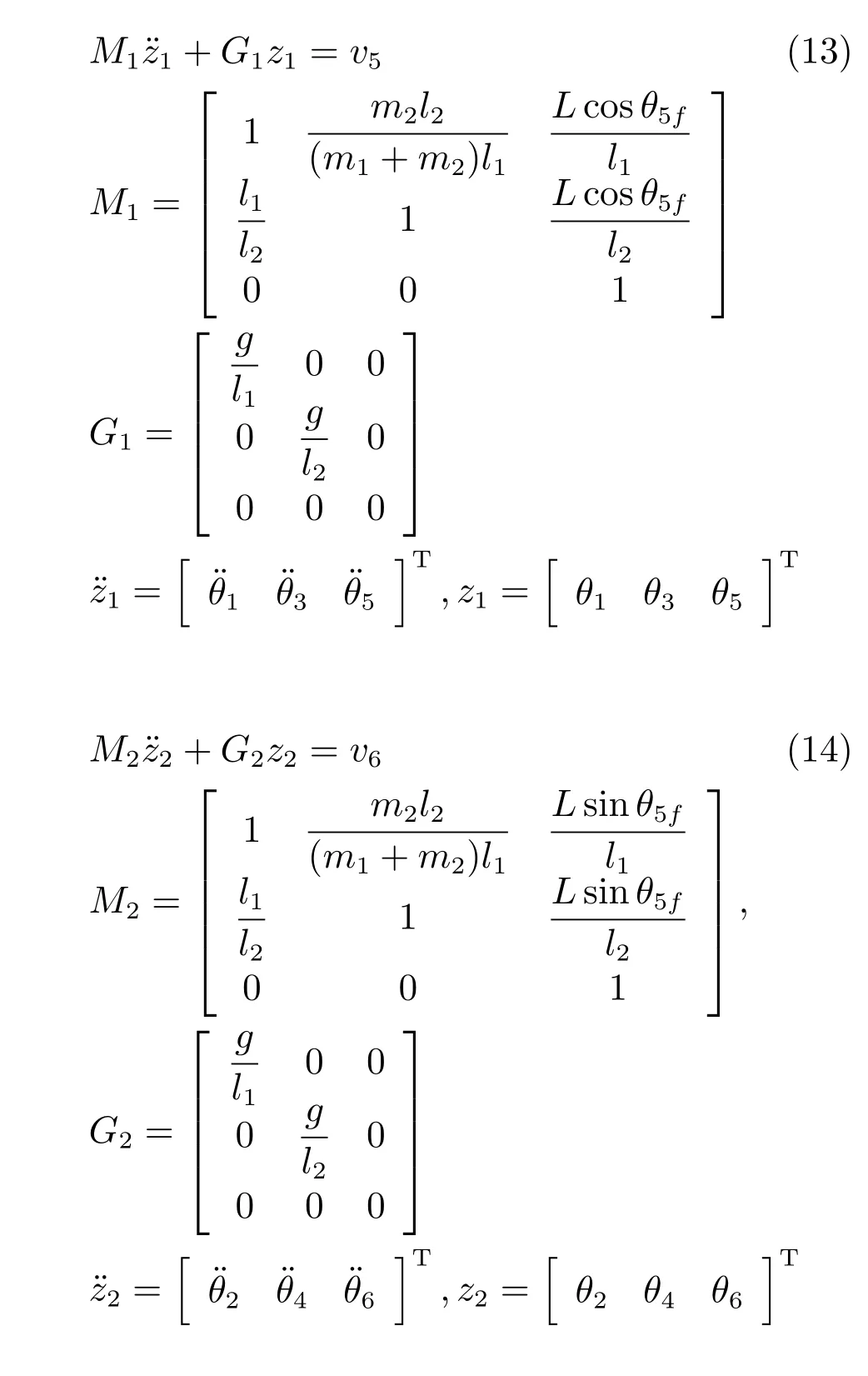
由式(13)和式(14)可知,起伏子系統(tǒng)和旋轉(zhuǎn)子系統(tǒng)擁有非常相似的結(jié)構(gòu),因此本文可以為其設(shè)計相似的控制器.
2 新型滑模控制器設(shè)計和穩(wěn)定性分析
2.1 含有非線性滑模面的滑模控制器設(shè)計
本節(jié)將為雙擺旋轉(zhuǎn)起重機設(shè)計一種新型含有非線性滑模面的滑模控制器從而同時實現(xiàn)旋臂高精度跟蹤和擺角抑制.不同于傳統(tǒng)的線性滑模面,本節(jié)所提出的非線性滑模面可以使閉環(huán)系統(tǒng)的阻尼比從最初的較小值變化為最終的較大值.較小的阻尼比可以為系統(tǒng)提供較快的響應(yīng)速度而較大的阻尼比則可減小超調(diào)量從而使得旋臂更加精確地跟蹤給定軌跡.
基于式(13)和式(14)所示起重機線性模型,本文所提出的非線性滑模面如下所示:
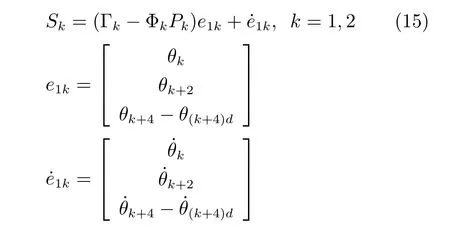


其中,Wk也是正定矩陣.選取合適的滿秩矩陣Γk使得其滿足赫爾維茨定理并為閉環(huán)系統(tǒng)提供一個較小的初始阻尼比.非線性函數(shù)Φk則要根據(jù)系統(tǒng)的輸出(即,旋臂的起伏角、旋轉(zhuǎn)角以及各方向第一、二級擺角)進行選擇并可用來調(diào)節(jié)閉環(huán)系統(tǒng)的阻尼比.雖然該函數(shù)的選取并不唯一,但是必須滿足以下兩個性質(zhì):
1)必須對于系統(tǒng)輸出可微并保證滑動模態(tài)存在.
2)必須從0變化成一個負(fù)值.
因此,本文采用如下所示的非線性函數(shù)進行控制器的設(shè)計[36]
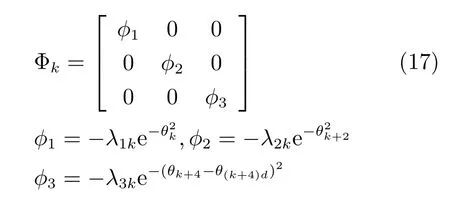
式中,λik(i=1,2,3,k=1,2) 為正值,而e(·)表示指數(shù)函數(shù).
通過設(shè)計合適的控制律,系統(tǒng)的所有狀態(tài)量都可以進入預(yù)期的滑模面上.當(dāng)處于滑模面時,即Sk=0,可得:

進一步整理可得:
由于所設(shè)計矩陣Γk,Φk和Pk都是可逆的,因此上式所示系數(shù)矩陣也是可逆的,即該矩陣是非奇異的.
為了驗證所提出滑模面的穩(wěn)定性,考慮如下所示的李雅普諾夫函數(shù):

取上式一階時間導(dǎo)數(shù),可得:
接下來,基于上述所設(shè)計的非線性滑模面并采用指數(shù)趨近律,可得:
其中,Kk和Qk為系數(shù)矩陣,并滿足Kk>0,Qk>0.

2.2 穩(wěn)定性分析
本節(jié)進行系統(tǒng)穩(wěn)定性分析,并考慮如下所示的李雅普諾夫函數(shù):

取上式一階時間導(dǎo)數(shù),可得:
將式(23)代入式(25),可得:

進一步,設(shè)Sk(t)初值Sk(0)>0,求解式(22)可得:

最終系統(tǒng)從初始狀態(tài)到達滑模面(Sk=0)所需時間為,


值得注意的是,由于符號函數(shù)的不連續(xù)性,式(23)所示控制器會導(dǎo)致系統(tǒng)產(chǎn)生抖振[33].為此,在實際應(yīng)用時采用飽和函數(shù)來替代符號函數(shù),則
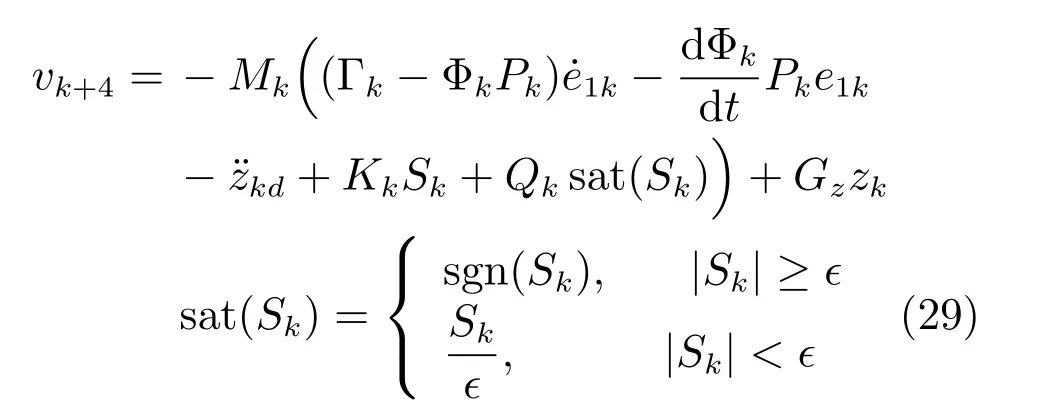
其中,?表示邊界層的厚度且滿足?>0.
注1.進一步討論新控制器對系統(tǒng)穩(wěn)定性的影響,將式(29)代入式(25),可得:

3 仿真分析結(jié)果和討論
3.1 仿真條件
從理論上講,階躍信號、擺線以及輸入整形曲線等均可作為旋臂的目標(biāo)軌跡,從而進行控制性能的評價.然而,階躍信號具有不連續(xù)性,容易對起重機系統(tǒng)造成沖擊,因此在實際工程中很少直接使用.另外,當(dāng)系統(tǒng)參數(shù)發(fā)生變化時,輸入整形曲線往往需要進行重新設(shè)計.而擺線可以在初始點和終點處提供零加速度,從而減輕對系統(tǒng)的沖擊.因此,采用如下所示的擺線作為旋臂運動的期望軌跡:
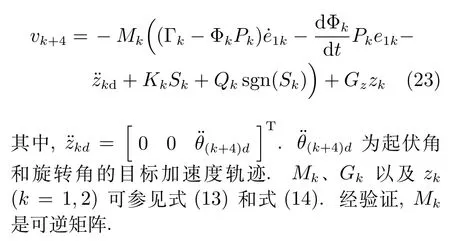
其中,θ(k+4)f,θ(k+4)0,ts和tf分別表示旋臂起伏角和旋轉(zhuǎn)角的目標(biāo)值,初始值,到達時間和最終時間.同時設(shè)定θ5f=40?,θ6f=45?,θ50=θ60=0?,ts=3s和tf=10s,并設(shè)定當(dāng)時間t屬于區(qū)間(ts,tf]時,θ(k+4)f=θ(k+4)d成立.系統(tǒng)參數(shù)如表1所示.而控制器參數(shù)則如表2和表3所示,其中參數(shù)λik主要影響著控制性能,具體分析詳見附錄A.
3.2 仿真結(jié)果
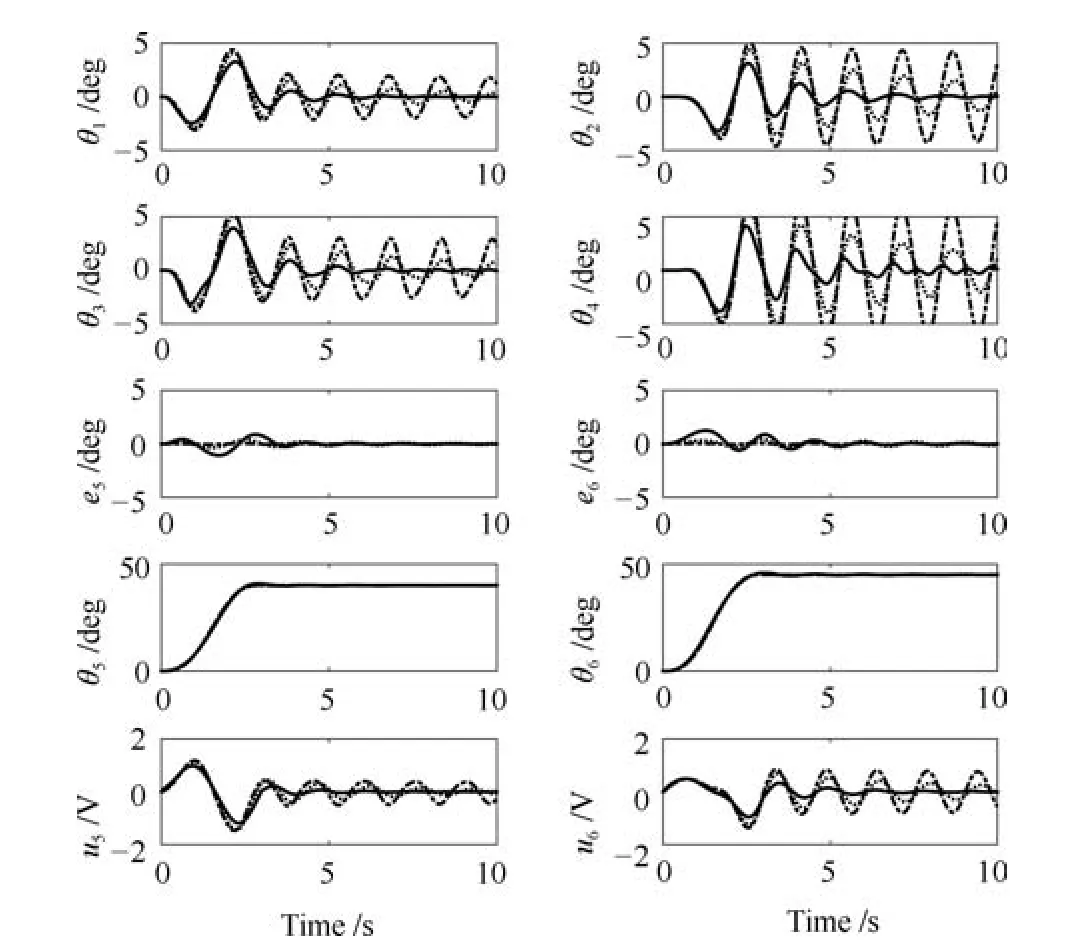
本文所提方法的仿真結(jié)果和傳統(tǒng)線性滑模面(即Φk=0)的結(jié)果進行比較.吊繩長度分別設(shè)定為l2=0.1m,l2=0.2m 和l1=0.3m.對起伏角θ5、起伏角跟蹤誤差e5、旋轉(zhuǎn)角θ6、旋轉(zhuǎn)角跟蹤誤差e6、擺角θ1,θ3,θ2和θ4的仿真結(jié)果分別如圖3~5所示.

表1 起重機系統(tǒng)模型參數(shù)Table 1 Parameters of crane system

表2 起伏子系統(tǒng)控制器參數(shù)Table 2 Parameters of controller in vertical subsystem

表3 旋轉(zhuǎn)子系統(tǒng)控制器參數(shù)Table 3 Parameters of controller in horizontal subsystem

表4 定量分析(l2=0.1m)Table 4 Quantitative analysis(l2=0.1m)

表5 定量分析(l2=0.2m)Table 5 Quantitative analysis(l2=0.2m)

表6 定量分析(l2=0.3m)Table 6 Quantitative analysis(l2=0.3m)
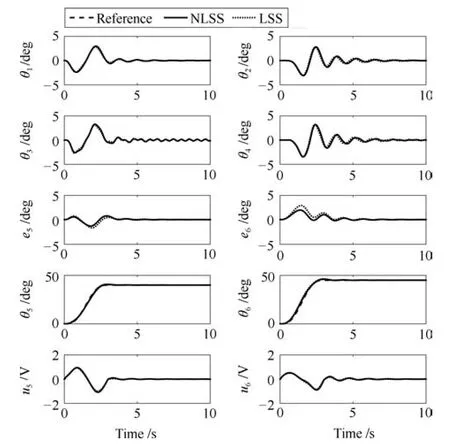
圖3 仿真結(jié)果(l2=0.1m)Fig.3 Simulation results(l2=0.1m)
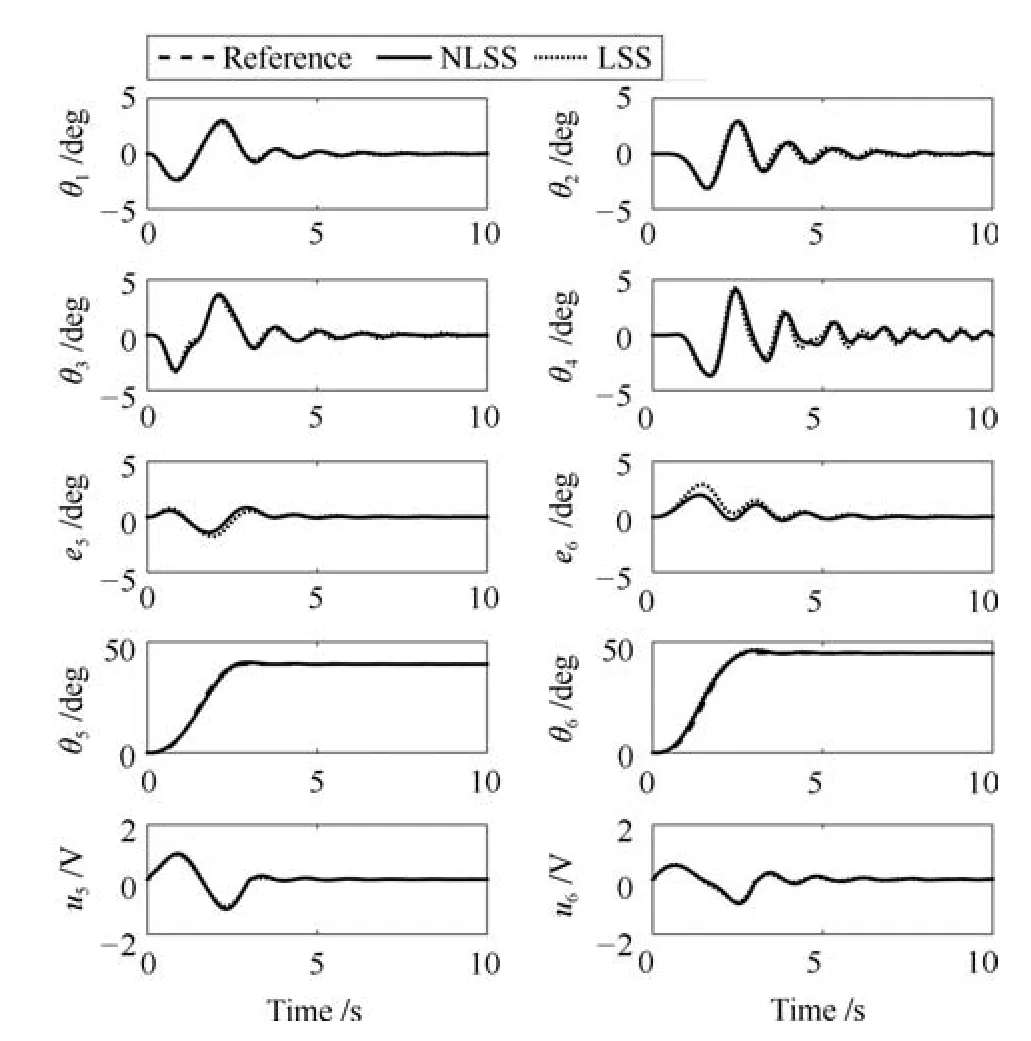
圖4 仿真結(jié)果(l2=0.2m)Fig.4 Simulation results(l2=0.2m)

圖5 仿真結(jié)果(l2=0.3m)Fig.5 Simulation results(l2=0.3m)
為了進行定量分析,分別將本文所提方法和傳統(tǒng)方法應(yīng)用于旋轉(zhuǎn)起重機時的最大起伏角誤差e5max(deg),最大旋轉(zhuǎn)角誤差e6max(deg),起伏方向第一級擺角最大值θ1max(deg),起伏方向第二級擺角最大值θ3max(deg),旋轉(zhuǎn)方向第一級擺角最大值θ2max(deg)和旋轉(zhuǎn)方向第二級擺角最大值θ4max(deg)如表4~表6所示.由這些圖與表可知,雖然兩種方法對于懸繩長度變化都具有魯棒性,但是使用本文所提方法可以分別減小大約40%的起伏角最大跟蹤誤差和52%的旋轉(zhuǎn)角最大跟蹤誤差.另外,對于所有的情況,荷載擺動都得到了良好的抑制,并且隨著懸繩長度的增加擺角也逐漸增大.這些結(jié)果驗證了本文所提方法既具有較好的魯棒性還具有較好的跟蹤性能,同時不降低擺角抑制性能.
4 結(jié)論
本文為了同時實現(xiàn)雙擺旋轉(zhuǎn)起重機高精度跟蹤和擺角抑制,首先,建立含有雙擺效應(yīng)的起重機動力學(xué)模型,并采用干擾觀測器進行解耦線性化.其次,基于此線性模型分別為其設(shè)計含有非線性滑模面的滑模控制器,并通過李雅普諾夫定理分析其穩(wěn)定性.通過采用本文所提方法,無論吊繩長度l2=0.1m,l2=0.2m或者l2=0.3m,都實現(xiàn)了旋臂起伏角和旋轉(zhuǎn)角的跟蹤和兩級殘留擺角的抑制.通過與傳統(tǒng)線性滑模比較,在不改變控制器擺角抑制性能的前提下,起伏角和旋轉(zhuǎn)角的跟蹤誤差分別降低了大約40%和52%.

附錄A 不同非線性滑模面參數(shù)對控制性能影響分析
本節(jié)通過仿真對非線性滑模面參數(shù)選取進行分析,并獲得其對控制性能的影響.在圖A示的結(jié)果中,實線對應(yīng)參數(shù)表2中λik值,點線分別對應(yīng)λ11=12,λ21=15,λ31=7,λ12=12,λ22=15和λ32=8.而點劃線則對應(yīng)λ11=120,λ21=150,λ31=70,λ12=120,λ22=150 和λ32=80.由圖可知,雖然隨著λik的增大,旋臂的定位精度會大大提高,但是同時也降低擺角抑制性能.
圖A1 不同λik情況下的仿真結(jié)果Fig.A1 Simulation results for different λik
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年6期)2020-09-11 07:45:28
大眾投資指南(2020年10期)2020-07-24 08:03:48
甘肅教育(2020年12期)2020-04-13 06:24:56
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34