運輸類飛機最小離地速度試飛設計與風險控制
2019-09-10 18:42:58屈飛舟劉靜
航空科學技術 2019年1期
關鍵詞:風險控制
屈飛舟 劉靜
摘要:最小離地速度是民用運輸類飛機制定起飛特征速度的關鍵。最小離地速度試飛是民用運輸類飛機最大性能起飛的試驗機動,是在地面效應影響下的飛機低速大迎角試飛科目,試驗難度大、風險高,對試飛技術、試飛組織和試飛駕駛技術要求很高。目前國內僅有新支線飛機按照民用航空規章進行了相關試驗。研究了民用運輸類飛機最小離地速度試飛的類型和理論,對運輸類飛機最小離地速度試飛中的關鍵技術和風險控制方法進行了深入研究,可供所有類型運輸類飛機最小離地速度試飛借鑒使用。
關鍵詞:最小離地速度;試飛方案;尾橇;適航,風險控制
中圖分類號:V217.3 文獻標識碼:A
最小離地速度(氏u)是民用運輸類飛機制定起飛速度和保障飛機安全起飛的的關鍵速度,新研制的飛機必須按照適航規章的要求進行最小離地速度試飛。在軍用運輸類飛機飛行試驗中引入適航管理理念,需要進行最小離地速度試飛,而最小離地速度是飛機在大迎角狀態下離地獲得的,試飛風險高,難度大,試飛員將其比喻為“刮胡刀刮臉”,飛機上安裝的尾橇系統就是“刮胡刀”,跑道就是“臉”,國際上能玩好這把刮胡刀的試飛員不超過10個。最小離地速度試飛方案如何設計、風險如何控制就成了試驗能否成功的關鍵研究點。
1 最小離地速度試飛類型
最小離地速度試飛中,飛機加速到特定速度時,試飛員拉桿使飛機抬頭,飛機保持最大迎角狀態直至離地起飛。飛機最小離地速度的試飛類型與飛機的幾何特性、失速特性和升降舵操縱效能相關。圖1給出了飛機升力系數CL隨迎角α變化的典型曲線。圖中θ為俯仰角。
若飛機抬前輪后,可以達到圖1中1點的升力系數,而飛機尾部還沒有接地,飛機迎角不能再繼續增大,否則飛機還未離地就已經失速。這種類型飛機的最小離地速度受失速限制。該類型的飛機極少。
若飛機抬前輪后,達到圖1中2點的升力系數位置,還未到達起飛構型下的最大升力系數,同時飛機的尾部已經接地,飛機的抬頭姿態無法繼續增大,則這種飛機的最小離地速度是受飛機幾何結構(尾部擦地)限制的。該類型的飛機較為常見。
第三種類型是飛機的俯仰操縱權限達到最大,飛機還沒有達到尾部觸地的狀態,同時也未達到最大升力系數位置,即圖1中3點的位置,此時飛機的最小離地速度受俯仰操縱權限限制。
2 最小離地速度理論分析
最小離地速度試驗要求準確確定飛機離地時的校正空速。分析飛機離地時的受力狀態,在航跡坐標系下,飛機在縱向平面內的動力學方程為[1]:
當飛機離地時,動力學方程應當滿足如下條件:式中:T為發動機推力;W為飛機重力;γ為航跡角;αmu為最小離地速度對應的迎角;φp為發動機安裝角;CLmu為飛機以最小離地速度起飛時對應的升力系數;q為動壓;S為機翼參考面積。
航跡角γ很小,約為零,則式(2)可變為:
最小離地速度試飛各推重比試驗點在不同的試驗重量下進行,導致不同推重比的最小離地速度試飛結果并不存在一定的線性規律,因此需要引入基準失速速度VSR,對最小離地速度試飛結果進行規一化處理,同時更容易進行起飛速度的符合性分析。式中:VSR為參考失速速度;CLmax為參考失速速度對應的升力系數。
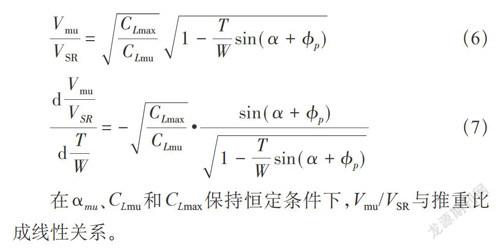
將式(5)代入式(4),可得:
在αmu、CLmu和CLmax保持恒定條件下,Vmu/VSR與推重比成線性關系。
3 適航條款分析
為了防止飛機在起飛時出現機尾擦地的情況,適航規章要求在飛行試驗中要進行過早抬前輪起飛、過度抬前輪起飛、過早過度抬前輪起飛,過早過度過快抬前輪起飛和最大可用速率抬前輪起飛,在各種試驗情況下檢查申請人制定的起飛速度和起飛程序是否足夠安全[2]。
最小離地速度是制定起飛特征速度的基礎。在適航規章中對最小離地速度的要求為該速度為校正空速,在等于和高于該速度時,飛機可以安全離地并繼續起飛。最小離地速度必須在申請審定的整個推重比范圍內由申請人選定。在制定飛機的抬前輪速度(VR)時,要求飛機如果在VR速度上以實際可行的最大抬頭率抬頭,得到的離地速度(VLOF)將不小于全發工作Vmu的110%,且不小于按單發停車推重比確定的Vmu的105%[3]。對適航條款的總結如圖2所示。適航條款通過這種安全裕度要求,確保飛機在起飛離地過程中與地面之間有足夠的間隙,以保障起飛的安全性。
4 試驗方案設計
4.1 試驗重量重心的選擇
從第二節的理論分析可知,最小離地速度與飛機的推重比近似呈線性關系,試飛時需要改變飛機的推重比進行。控制推力和控制飛行重量都可以實現推重比的改變,所以原則上試驗重量可以任意選擇。但是現代運輸類飛機的最小飛行重量和最大起飛重量之間的間隔很大,僅僅通過燃油量的改變無法覆蓋飛機的推重比范圍,往往重量的改變需要在試飛中調整飛機配重來實現,試驗的成本和進度都會受到很大影響。因此,國內外飛機進行該項試飛時通常都采用改變推力的方法進行。即在飛機建立大仰角起飛姿態前,將飛機的油門桿收到特定的位置,實現推重比的調整。
重心位置主要影響飛機的靜穩定性,飛機前重心時靜穩定性好,為使飛機達到可能的最大抬頭姿態,作用在平尾上的向下的空氣動力就要大。對于靜穩定的飛機來說,由于平尾的空氣動力與機翼的升力方向相反,在相同姿態角時,前重心離地所需機翼的升力大,即當重量和離地姿態相同的情況下,前重心的離地速度要大些,因此,從適航角度考慮,在重心前限進行最小離地速度試飛得到的結果更為保守,安全性更高。如果試驗時重心不在前極限,或者因為飛機在重心前限下達不到最大可能姿態(受俯仰操縱權限限制的飛機),則可以在稍后一點的重心進行試驗時,但條例允許的重心允差范圍是飛機整個重心范圍的±7%[4]。在其他重心位置進行的試驗,其結果必須進行修正。試驗狀態的升力系數采用下式進行修正:其中:CLmubz為修正到標準重心位置的最小離地速度對應的升力系數;CLmubz為試驗重心時的最小離地速度對應的升力系數;Lt為水平尾翼力臂;CGbz為標準重心位置;CGsj為實際重心位置。
對于飛機前限變化比較復雜的情況,為了在重心的前極限位置進行試驗,試飛的重量就不是任意選取的,必須與飛機的重心相匹配。
4.2 最小推重比的確定
咨詢通告AC25-7C中要求,如果飛機的起飛速度在大推重比情況下受最小離地速度的限制,則需要進行包含一發不工作的最大推重比和全發工作的最大推重比兩種狀態的試飛。如果飛機的起飛速度在小推重比情況下受最小離地速度的限制,則需要進行包含一發不工作的最小推重比和全發工作的最小推重比兩種狀態的試飛。
最小離地速度試飛的風險很高,因此條例允許使用全發工作模擬一發不工作情況下的推重比。即便如此,使用全發工作模擬一發不工作情況下的最小推重比仍然具有較高風險。
圖3中A點和B點分別是飛機一發不工作狀態的最小推重比和最大推重比,C點和D點分別是飛機全發工作的最小推重比和最大推重比。A1點是使用全發工作模擬的一發不工作的最小推重比。A1點和A點之間的差值是考慮飛機一發不工作引起的阻力增加造成的。
通過對飛機一發不工作的極曲線和全發工作的極曲線試驗結果進行分析,可以得到飛機一發不工作的阻力增量隨偏航力矩的變化關系曲線,如圖4所示。計算一發不工作時的偏航力矩,然后從曲線中查得一發不工作造成的阻力系數增量,計算阻力的增加量。使用全發工作模擬一發不工作的推重比時,全發工作的推力值需減去阻力增量,因此使用全發工作進行模擬時,試驗的推重比更小一些[5]。
全發模擬試驗的推重比確定后,需要在空中先以確定的推力和預測的最小離地速度進行起飛一階段和二階段的爬升梯度檢查,確保飛機在進行最小離地速度試飛時能夠安全起飛離地。如果推重比不滿足適航條款的最低要求,則最小推重比的試驗需受飛機爬升梯度的限制。
4.3 縱向配平的選擇
當表明飛機受俯仰操縱權限限制時,咨詢通告允許使用比正常情況更大的飛機抬頭配平進行試驗。在最小離地速度試飛時,與正常的配平量相比,使用更大的抬頭配平可以使飛機更早抬頭,飛機達到預定姿態更早,從而使試飛員調整俯仰操縱到飛機離地之間的時間間隔更長,提高試驗的成功率。對于受幾何結構限制的飛機,在開始進行試驗時應首先使用正常起飛配平,在已經表明飛機不受俯仰操縱權限限制時,可以使用更大的抬頭配平優化試飛操作程序[6]。
4.4 離地信號的判斷
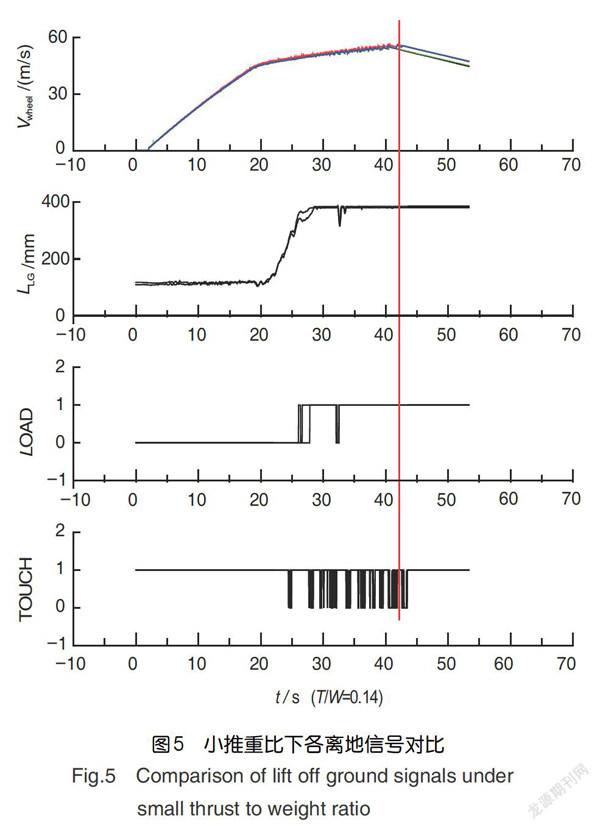
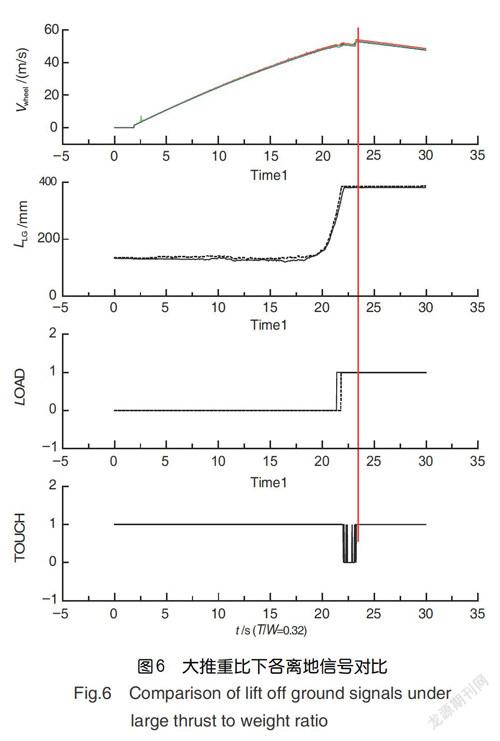
通常機輪載荷、起落架緩沖支柱位移和機輪輪速信號被用來作為飛機離地點的判斷信號[7]。不同的試驗對飛機離地點的判斷精度要求不同,最小離地速度試飛要確定一個基準速度用于制定飛機的起飛特征速度,判斷飛機離地點就變得尤為重要。圖5和圖6給出了不同推重比狀態下各種信號的對比。圖中參數從上到下依次為輪速、起落架緩沖支柱位移、輪載信號和尾橇擦地信號。
通過對不同推重比狀態下各種信號進行對比分析,輪速與尾橇擦地信號較為一致,隨著推重比的不同,4個參數之間的相互變化關系發生了明顯變化。當推重比較小時,緩沖支柱全部伸展和輪載消失后,飛機并沒有離地,輪速還在增加,尾橇擦地顯示飛機沒有離地。當推重比較大時,緩沖支柱位移和輪載與輪速和尾橇擦地信號才較為一致。因此,輪速是確定飛機離地點的重要參數,而起落架緩沖支柱位移和輪載信號不能用于飛機離地點的判定。
5 風險控制研究
5.1 風險分析
最小離地速度試飛中,飛機在近地面保持大迎角姿態離地,可能導致飛機尾部擦地和低空失速兩大風險,尾部擦地會損傷飛機結構,而低空失速直接會導致機毀人亡的重大事故。同時在小推重比試驗中,發動機功率小,所需的起飛距離長,而此時又由于飛機姿態角很大,試飛員的視野受限,很難看到跑道正前方,因此在該試驗中飛機也有沖出跑道或偏出跑道的風險。針對試飛員視野受限問題,在該試驗中,需要事先調高座椅的位置,同時副駕駛或觀察員時刻關注飛機的狀態,根據需要及時增大發動機功率,可以避免飛機偏離或沖出跑道。
對于低空失速的風險,首先要設置好飛機失速保護系統的狀態,保留副駕駛一側的失速告警,既可以提醒機組飛機所處的狀態,又避免了告警對主駕駛操縱的影響。主駕駛在飛機離地過程中對飛機俯仰角速度和滾轉的控制也極為重要,離地瞬間較小的俯仰和滾轉姿態變化可以避免飛機進入復雜的運動狀態。
尾部擦地是最小離地速度試飛中最主要的風險點,后文對此風險的控制進行了詳細分析。
5.2 尾撬設計
最小離地速度試飛中最大的風險點是飛機尾部擦地損傷,圖7為某型飛機進行最小離地速度試飛時尾部擦傷情況。
飛機加裝了尾橇用于保護機體結構。但還是出現了尾部擦傷的情況。選取A380飛機最小離地速度試飛進行比較研究,圖8中(a)為A380飛機,(b)為尾部擦傷的飛機。對兩者進行比較發現,當尾橇觸地時,后者的尾部最低點已經幾乎接近地面,當飛機離地時,俯仰姿態進一步增加,就極可能出現尾部擦傷的情況。觀察兩者的尾部結構,可以看出,A380飛機的尾部呈圓錐狀,曲面沒有向下彎曲,而后者的尾部有向下彎曲,這種情況在飛機設計上是應該極力避免出現的。
通常要求尾橇裝機后,飛機最大俯仰角的減小量不超過0.5°[8],盡量減小尾橇對飛機最小離地速度的影響,獲得最大的飛機性能收益。對于圖8(b)中的飛機,在進行尾橇設計時要考慮飛機的特點。適當增大尾橇結構,當尾橇擦地時飛機尾部離地面有足夠的間隙。在性能損失可接受的情況下,確保飛行試驗的安全。
另外,由于尾橇在觸地過程中會產生大量的熱量,并迸出火花,因此在選擇尾橇材料時,要求材料具有耐磨性好,導熱差,具有阻燃特性[9]。
5.3 離地俯仰姿態的控制
對于受幾何結構限制的最小離地速度,一般期望在尾部觸地瞬間飛機俯仰角速度近似為零,以避免由于尾部重接地帶來的結構損傷現象。但是,不同推重比的最小離地速度試飛,從拉桿建立姿態、尾部觸地調整操縱到飛機離地整個過程中的時間間隔均存在差異,因此,這會給試飛員操作帶來很大的難度。
試驗推重比較小時,飛機滑行加速度較小,尾部觸地到飛機離地之間的時間間隔相對較長,通常有5~10S,此時試飛員可以回桿調整縱向操縱,消除尾部觸地時重接地的現象。
試驗推重比較大時,滑行加速度較大,尾部觸地到飛機離地之間的時間間隔通常只有2~3s,如果此時要求試飛員較早地回桿修正,以降低尾部觸地的俯仰角速度,可能存在沒有達到尾部觸地飛機就已經離地[10]。因此,大推重比的最小離地速度可能存在尾部重接地和飛機沒有達到尾部觸地就已經離地兩種現象之間的矛盾。
因此,對于大推重比的最小離地速度試飛,考慮可以使用能夠實現推重比的最大重量,以便盡力增加飛機離地速度,保證尾部觸地到離地之間具有足夠的加速時間,減輕試飛員進行操縱調整的難度。同時可以采用連續接地起飛的方式訓練試飛員在滑跑階段保持一定俯仰角的能力,實踐證明,這是一種十分高效的最小離地速度駕駛技術訓練方法。
6 結束語
本文分析了最小離地速度與飛機推重比的關系和最小離地速度對起飛速度制定的影響。對試飛中可能出現的飛機尾部擦地、低空失速以及偏出跑道等風險進行了詳細分析,重點剖析了尾部擦地造成結構損傷的原因,以及如何通過加裝尾橇系統和控制離地姿態的試飛技術來緩解風險。針對影響試飛結果的關鍵技術點,制訂了相應的試飛方案,對后續運輸類飛機進行最小離地速度試飛具有參考價值。
參考文獻
[1]張妙蟬,張建,吳密翠.運輸類飛機最小離地速度試飛數據處理方法[J].飛行力學,2011,29(5):81-96.
[2]劉靜,郗超.民用運輸類飛機最大可用速率抬前輪試飛技術研究[J].航空科學技術,2015,26(5):44-47.
[3]CCAR-25-R4中國民用航空規章第25部運輸類飛機適航標準[S].2011.
[4]EAA.AC25-7C Flight test guide for certification of transportcategory airplanes[S].2012:23-28.
[5]楊洪平,王立新,李勤紅.民機最小離地速度的工程計算方法[J].飛行力學,2006,24(2):9-12.
[6]張建.飛機最小離地速度試飛設計和風險控制技術[J].飛行力學,2014,32(6):549-556.
[7]Sligerland R.Minimum unstick speed impact on horizontal tailsizing for jet transports[C]//AIAA 2005-815,43rd AIAAAerospace Sciences Meeting and Exhibit,Reno,Nevada,2005.
[8]張建,屈飛舟,劉靜.受結構限制的運輸類飛機最小離地速度試飛技術[J].飛行力學,2012,30(5):458-462.
[9]陳明太,劉立蘇.民用飛機最小離地速度試飛實施方法研究[J].民用飛機設計與研究,2013,110(3):12-40.
[10]屈展文,張彤,揭裕文.最小離地速度合格審定飛行試驗優化方法研究[J].飛行力學,2016,34(6):90-94.
猜你喜歡
法制博覽(2016年11期)2016-11-14 10:57:01
時代金融(2016年23期)2016-10-31 13:15:35
經營者(2016年12期)2016-10-21 09:23:30
經營者(2016年12期)2016-10-21 09:21:36
經營者(2016年12期)2016-10-21 08:05:33
中國科技博覽(2016年18期)2016-10-19 08:02:53
中國市場(2016年35期)2016-10-19 02:01:14
商(2016年27期)2016-10-17 05:07:54
企業導報(2016年8期)2016-05-31 18:15:24
企業導報(2016年9期)2016-05-26 21:59:22
